We don't see it all the time but robots that make our lives easier are already here with us. While they look nothing like the Transformers (cool!) or the Terminator (cool but scary), they affect our lives just as deeply. They assemble our cars, package our goods, manufacture our electronics, harvest our crops, clean our floors, drive our cars and even fight our wars (scary again).
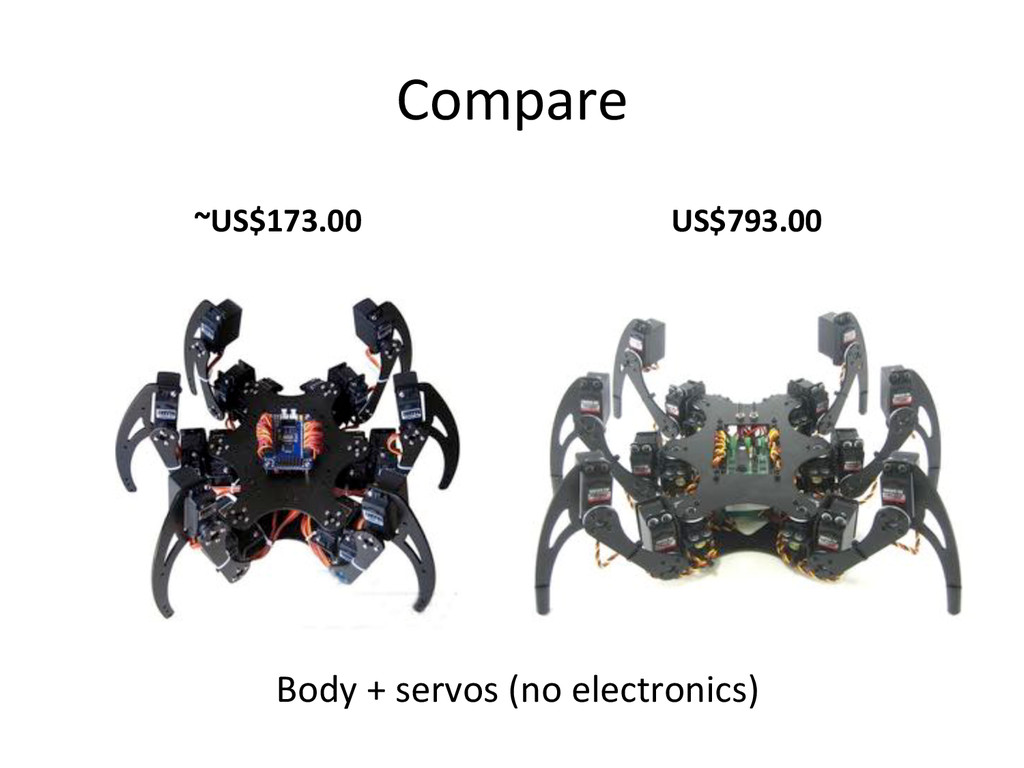
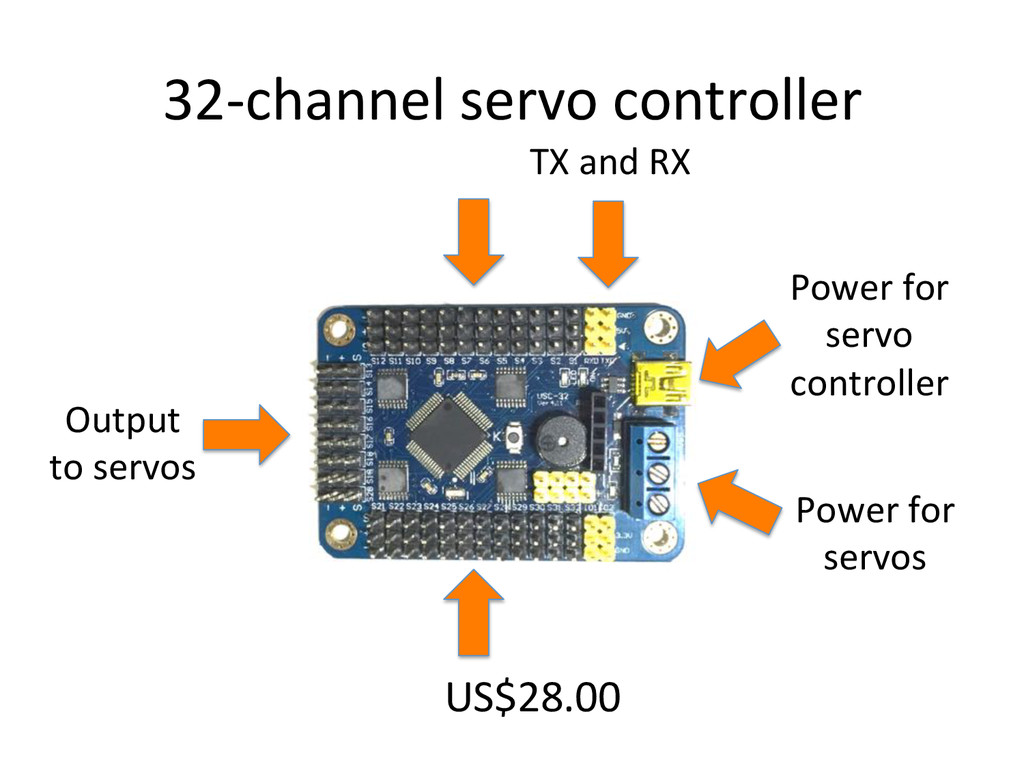
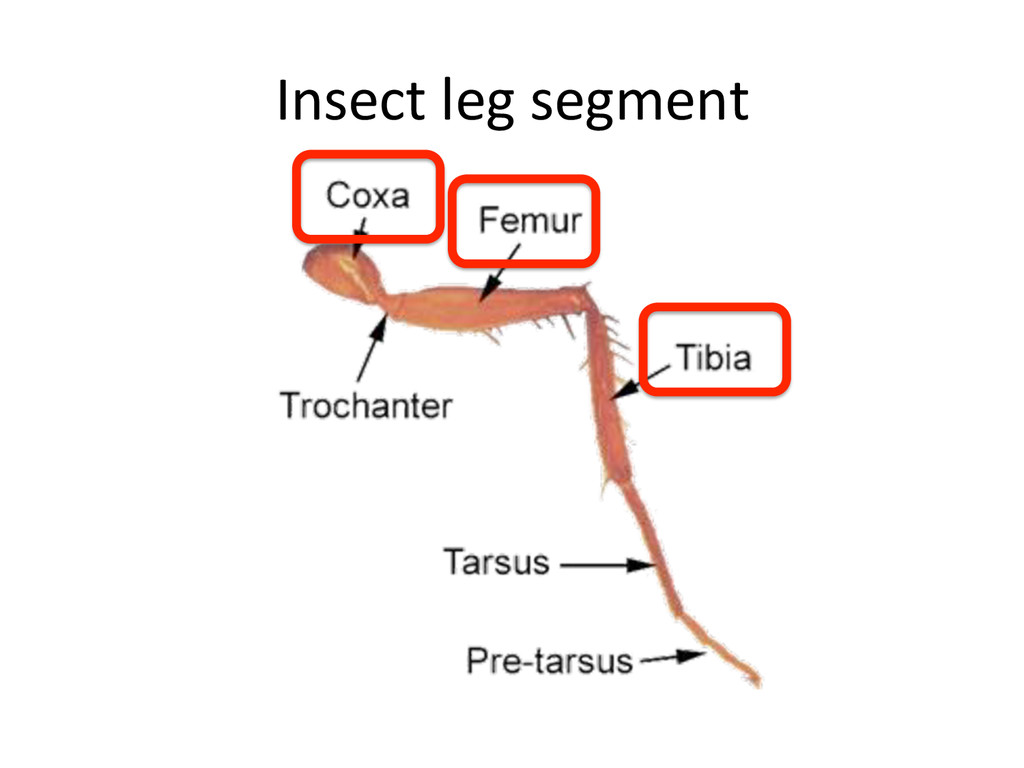
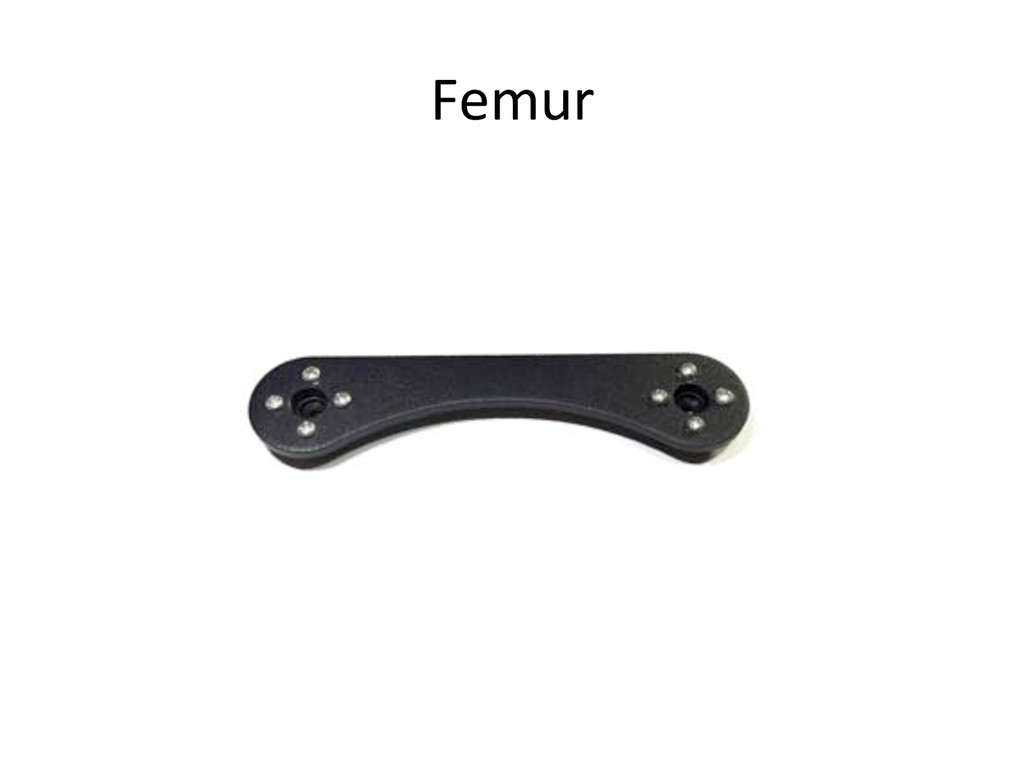
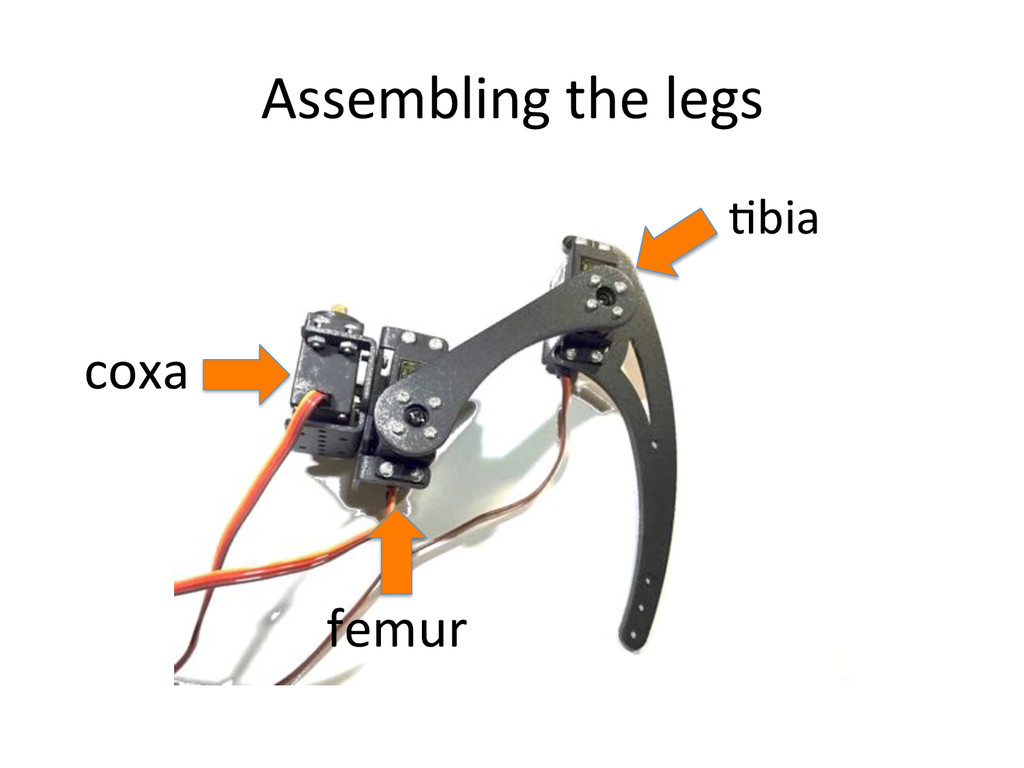
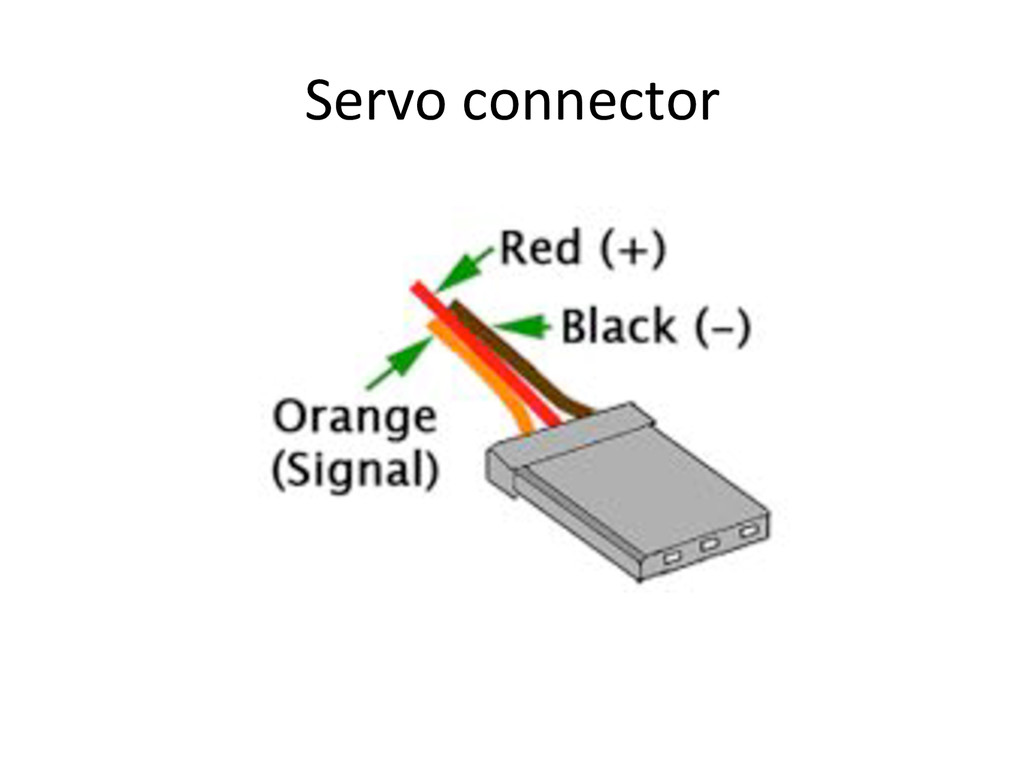
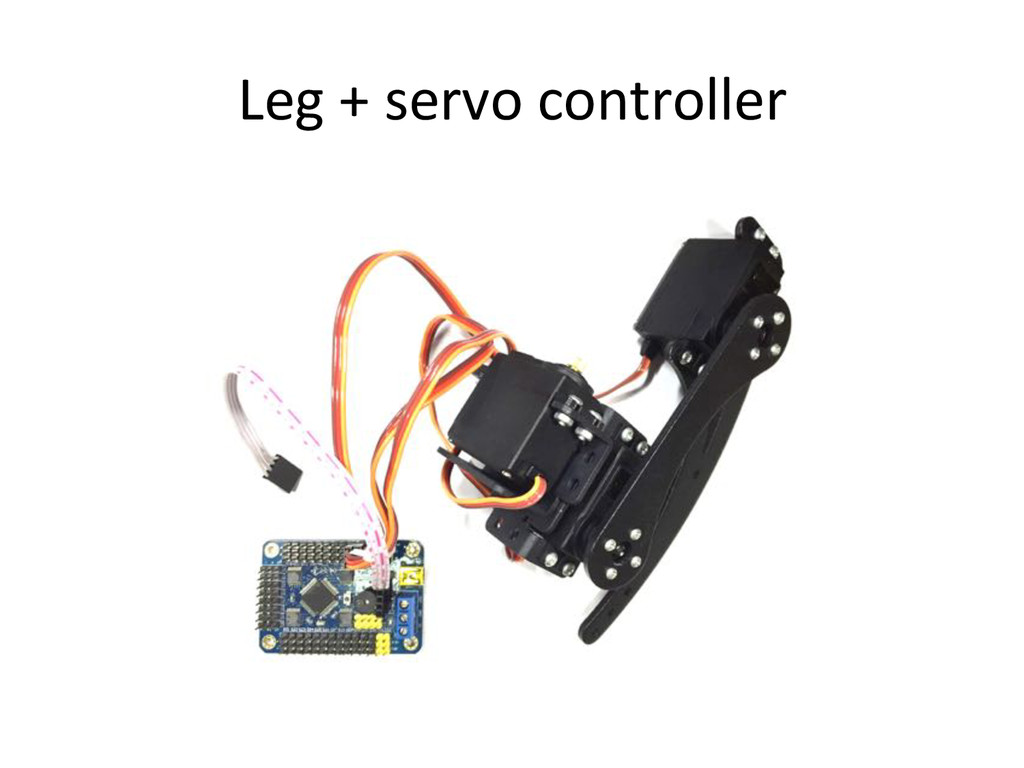
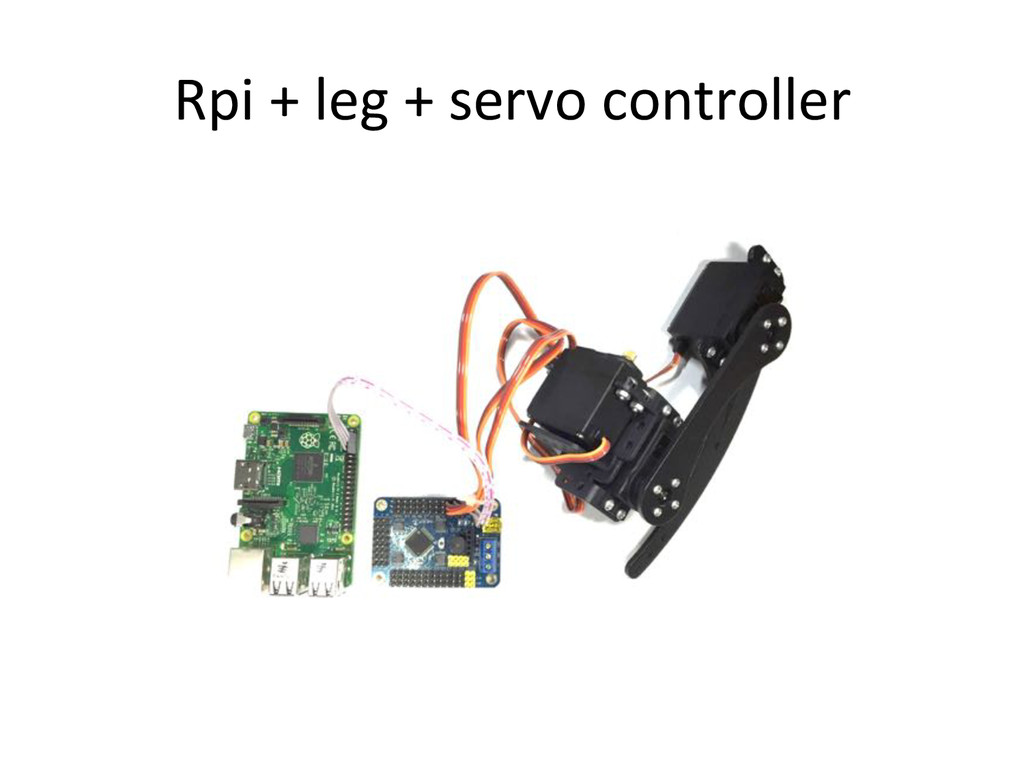
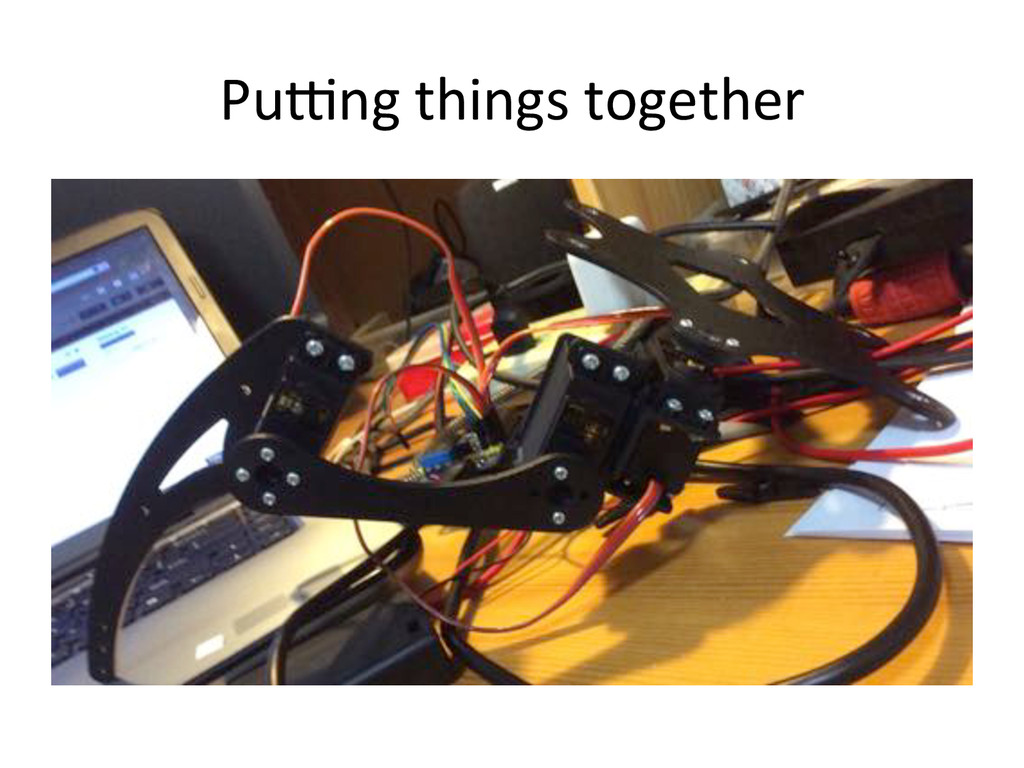
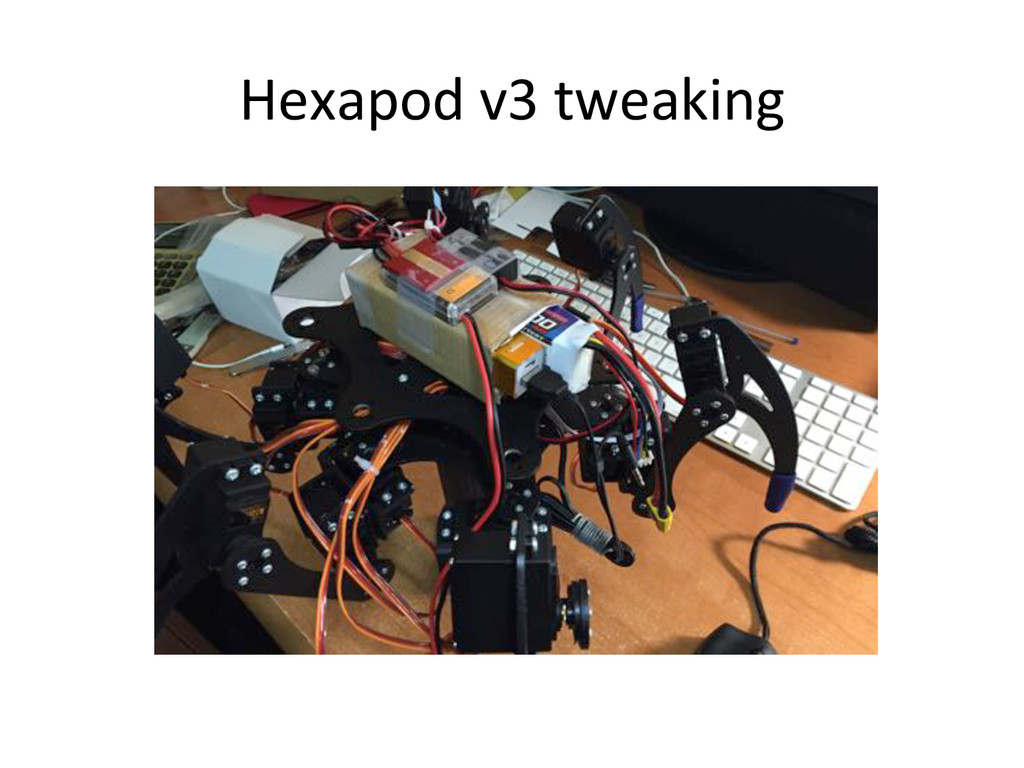
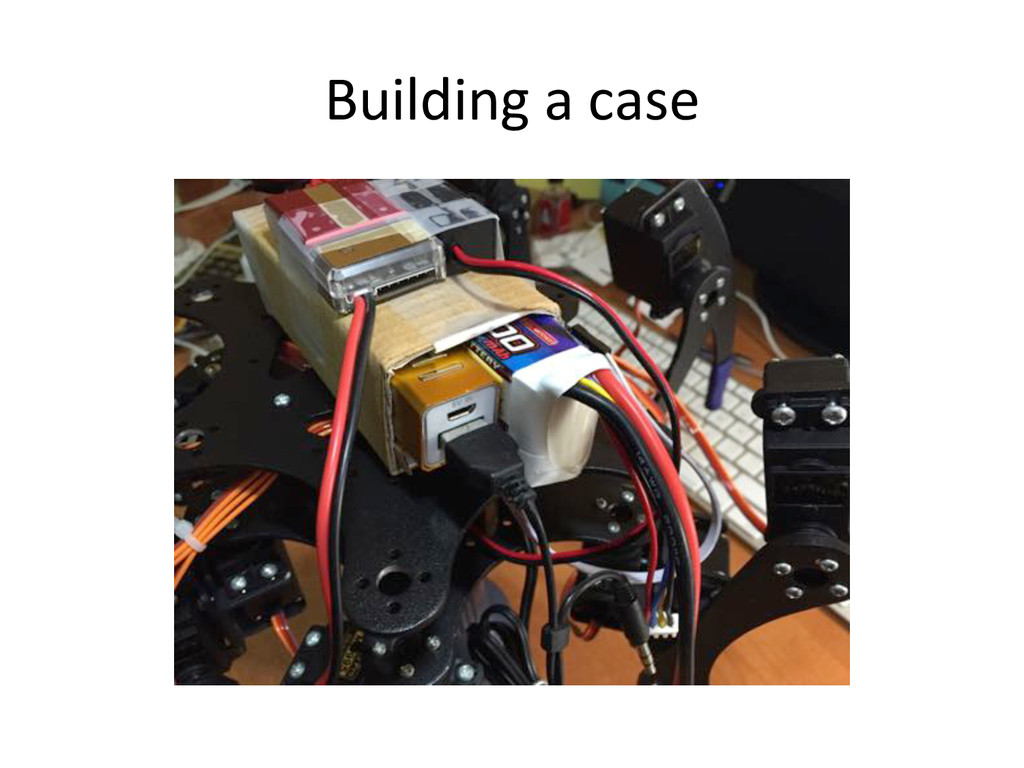
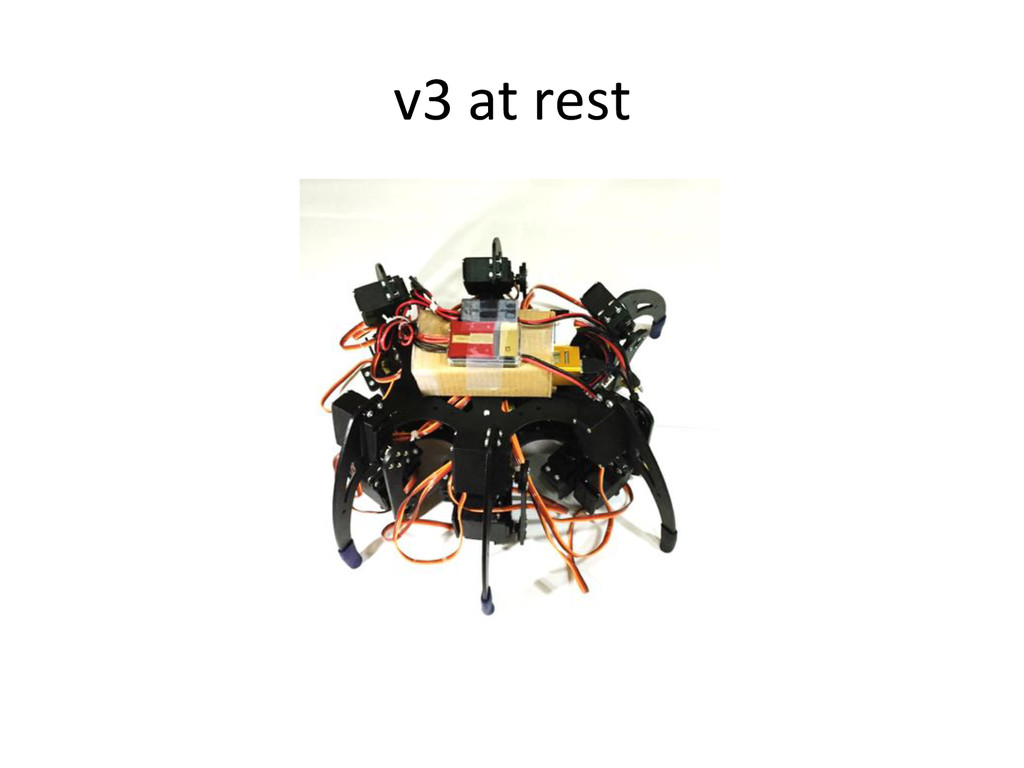
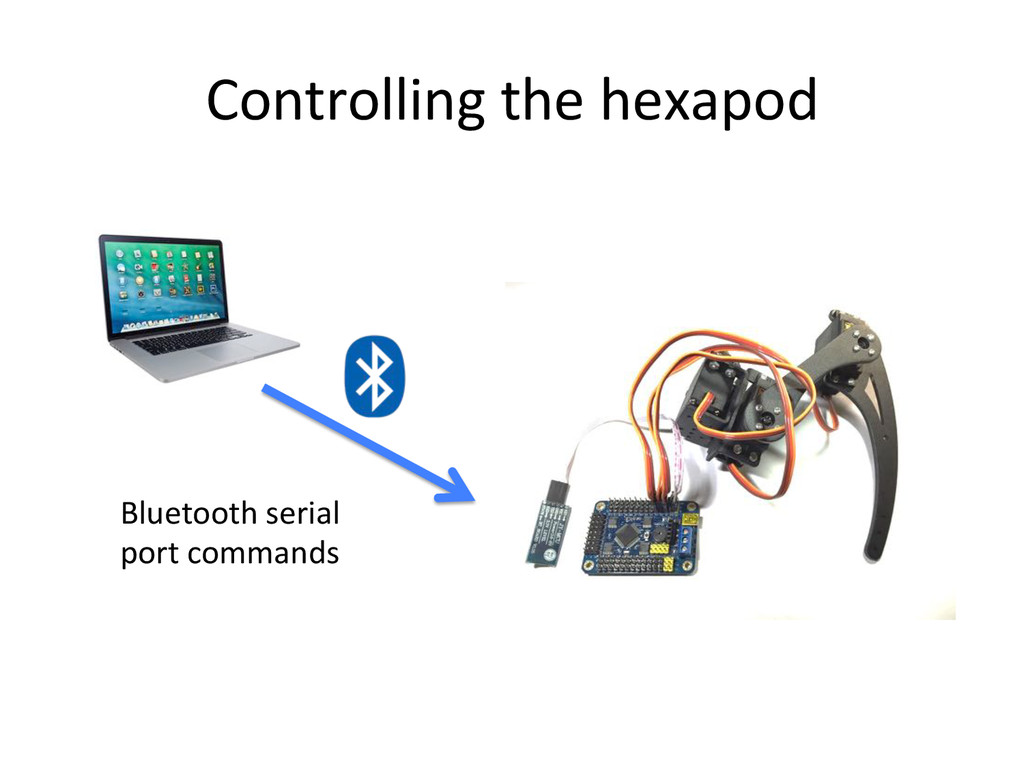
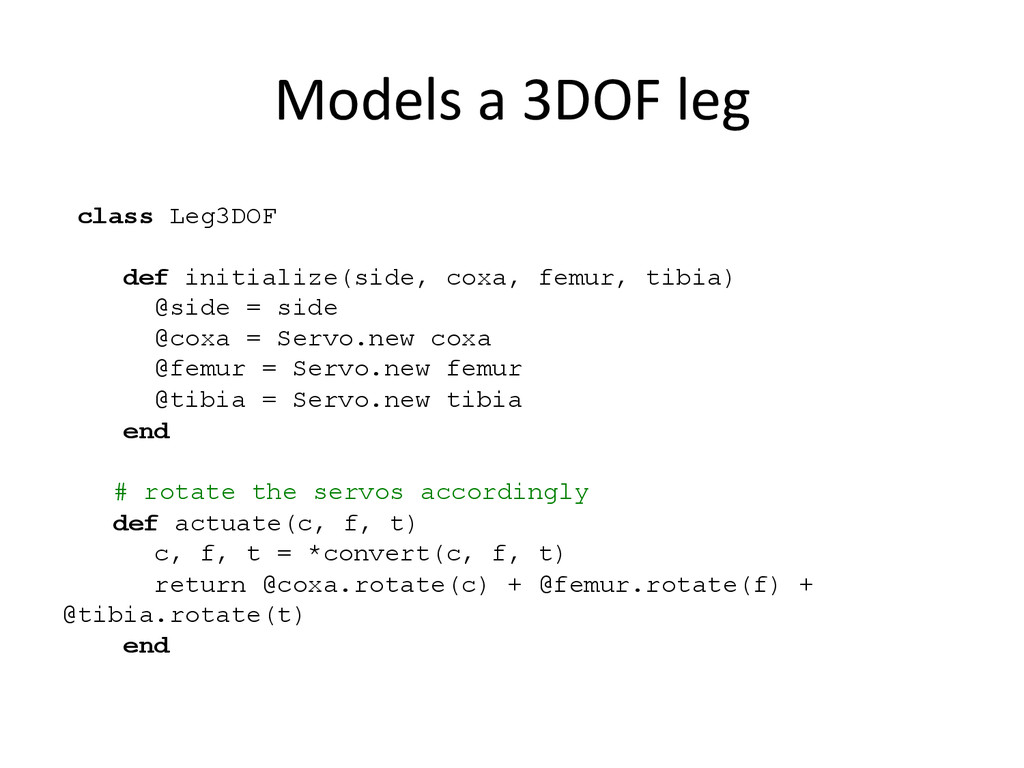
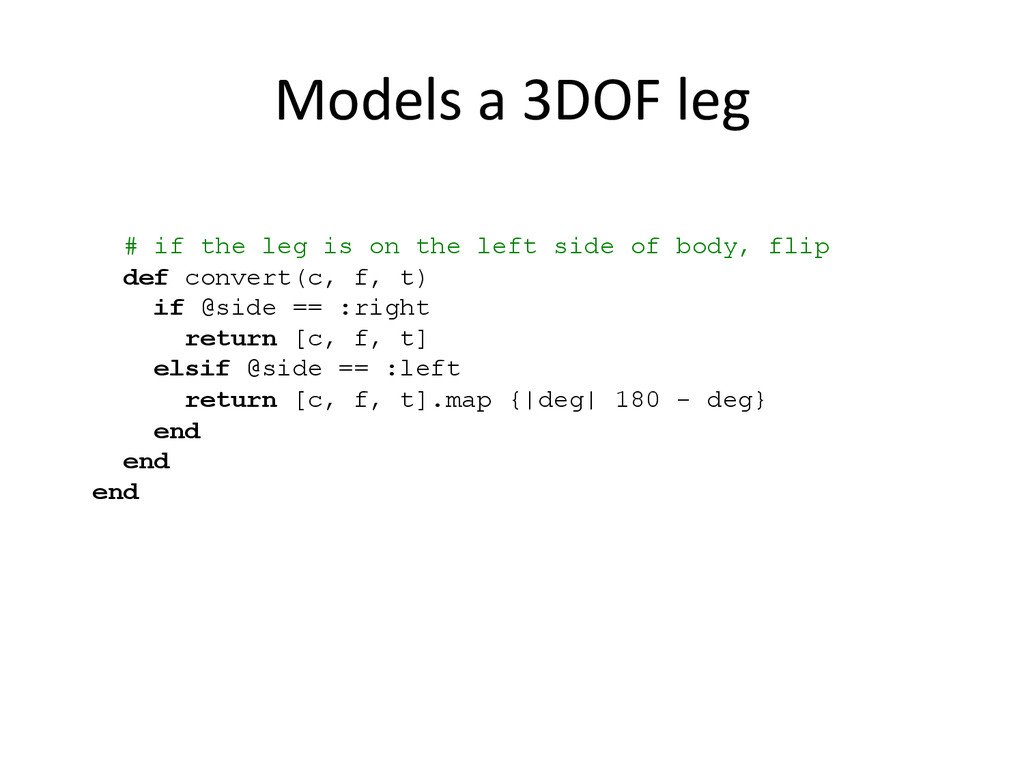
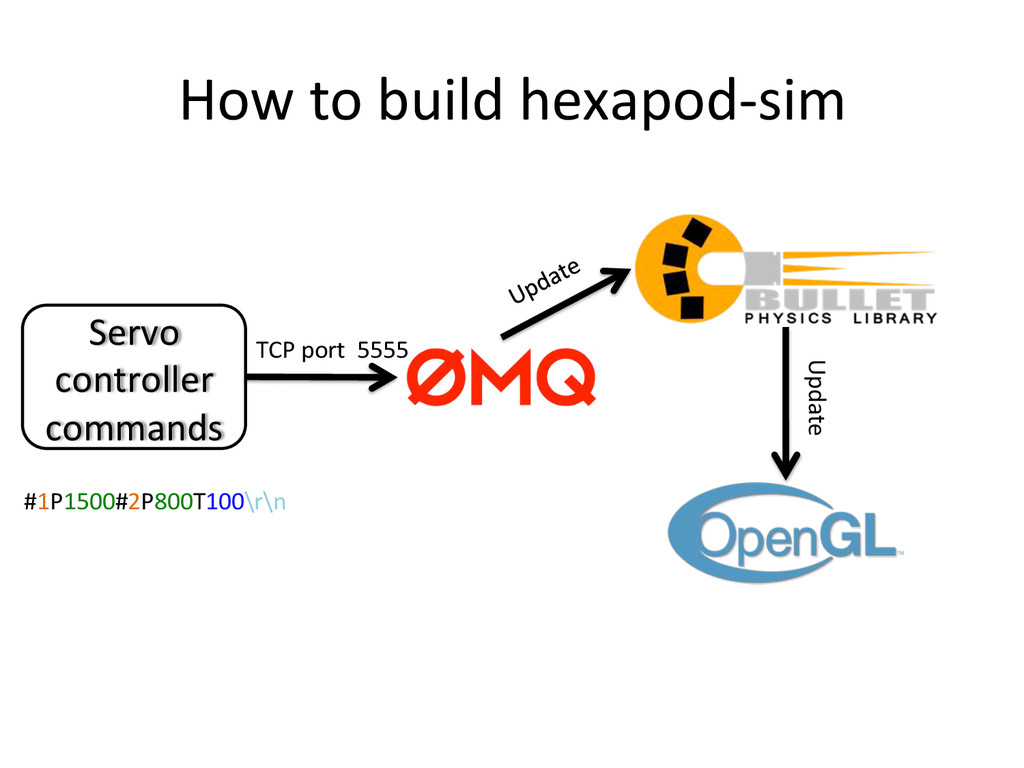
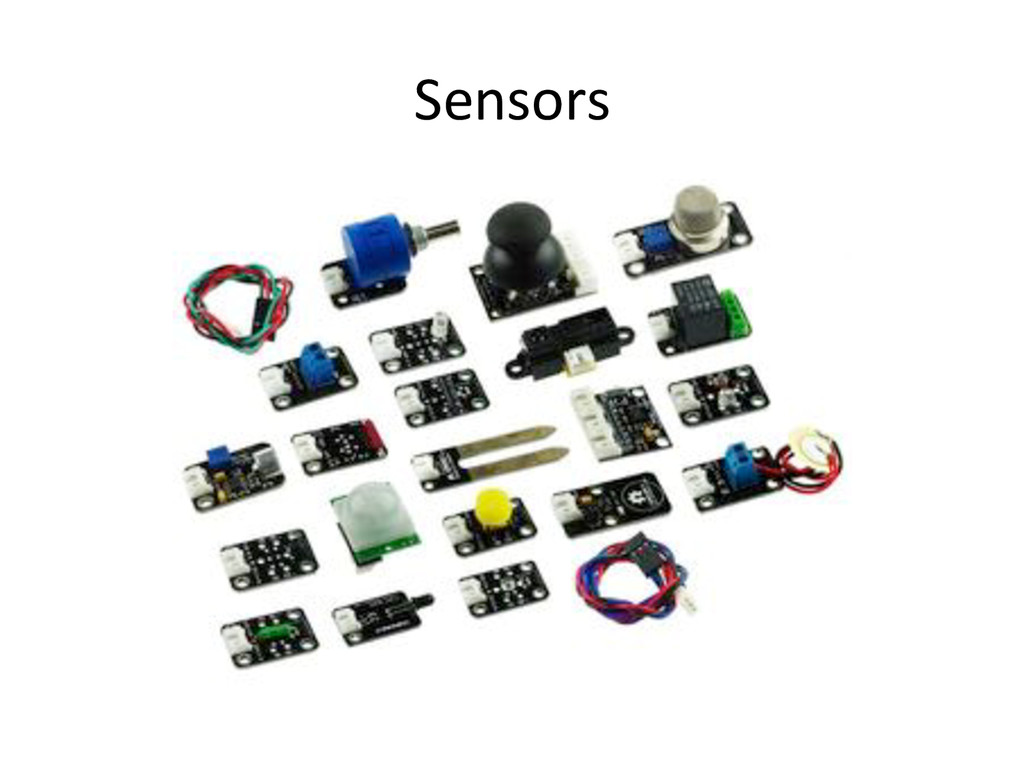
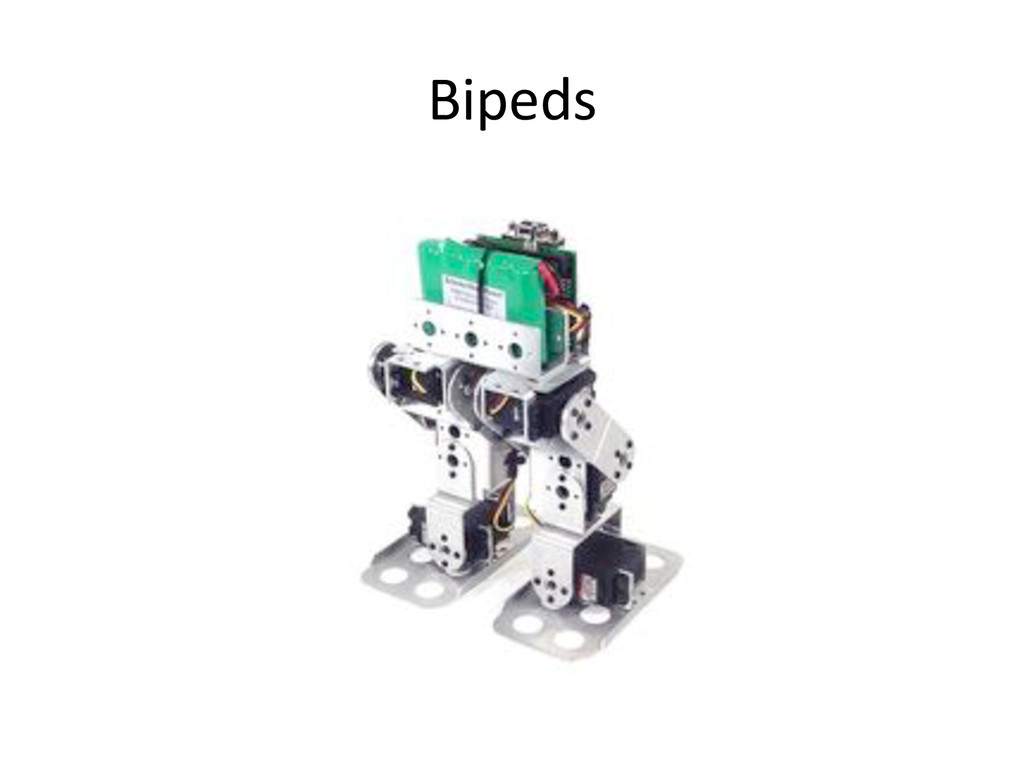
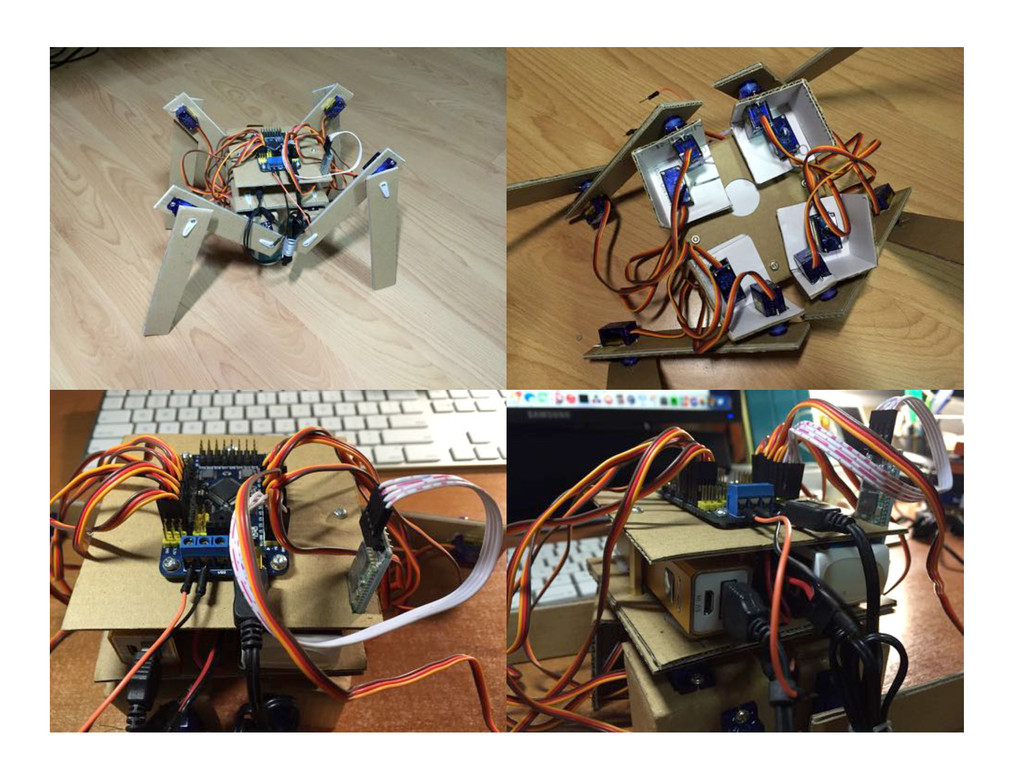
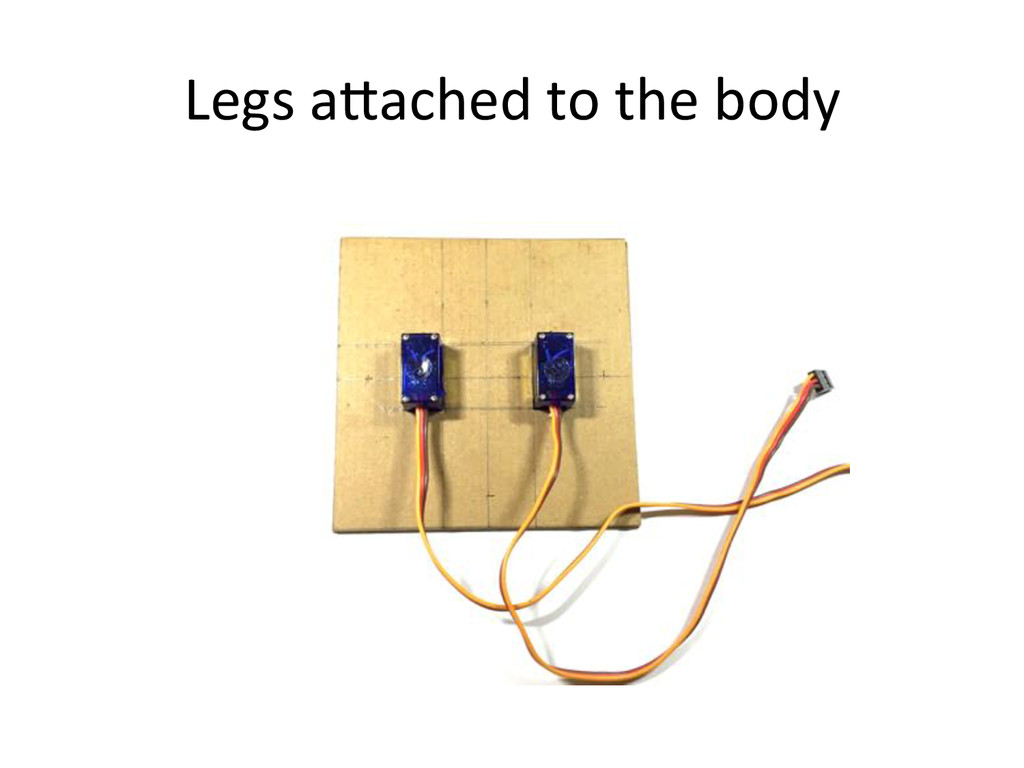
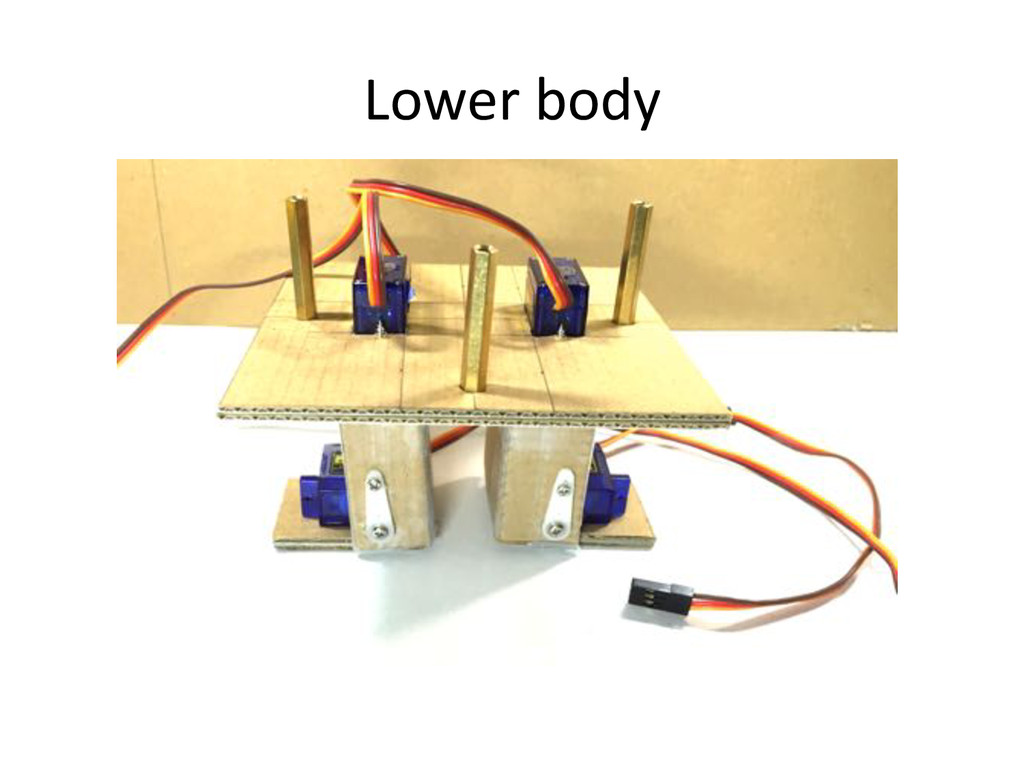
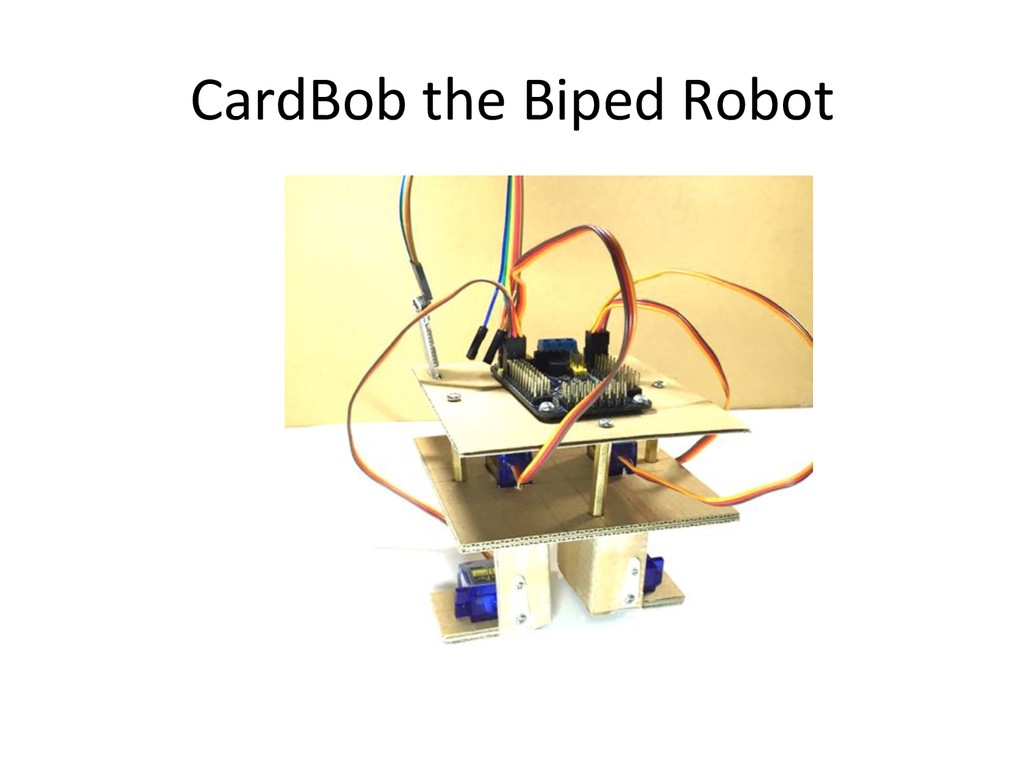
In this talk, we want to show you how you can create and program your own autonomous robots using Ruby. We will show you how we built an inexpensive hexapod spider robot and how we wrote the software to control it, using Ruby.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Hexapod)class) class HexapodRig { btDynamicsWorld* world; btCollisionShape* shapes[BODYPART_COUNT]; btRigidBody* bodies[BODYPART_COUNT];](https://files.speakerdeck.com/presentations/e1829918a9534d518ca598fcb0dcc90d/slide_74.jpg){kind=link}
![Create)the)shapes) // Body shapes[0] = new btBoxShape(btVector3(0.4,0.1,0.6)); for (int i=0;](https://files.speakerdeck.com/presentations/e1829918a9534d518ca598fcb0dcc90d/slide_75.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
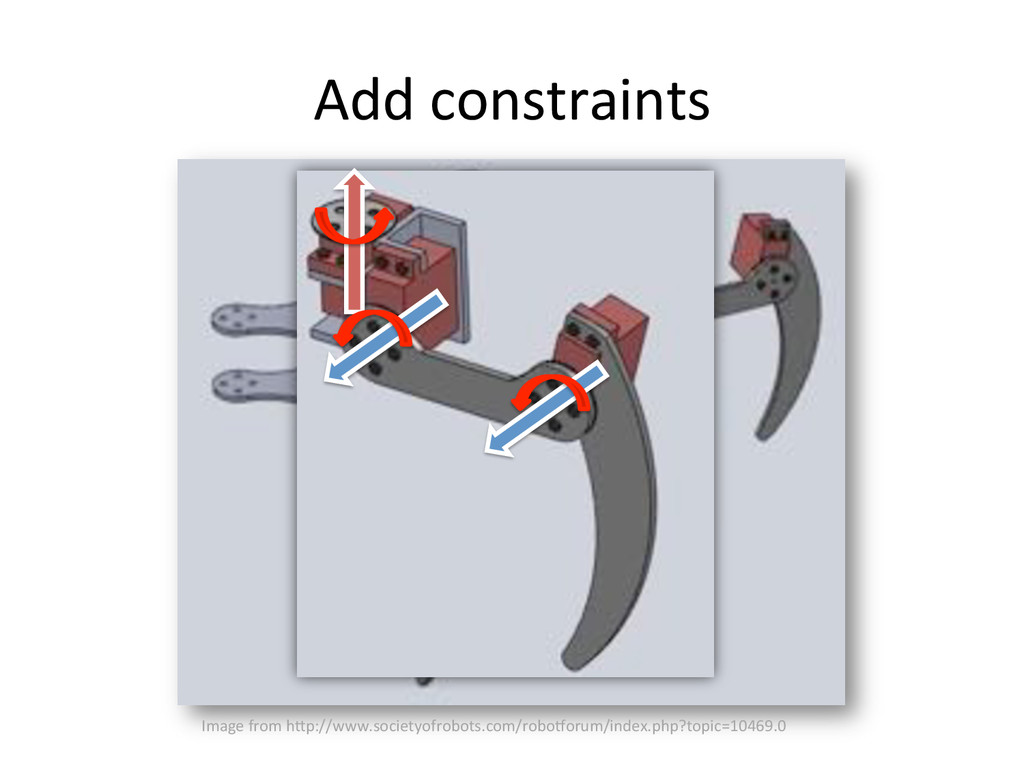
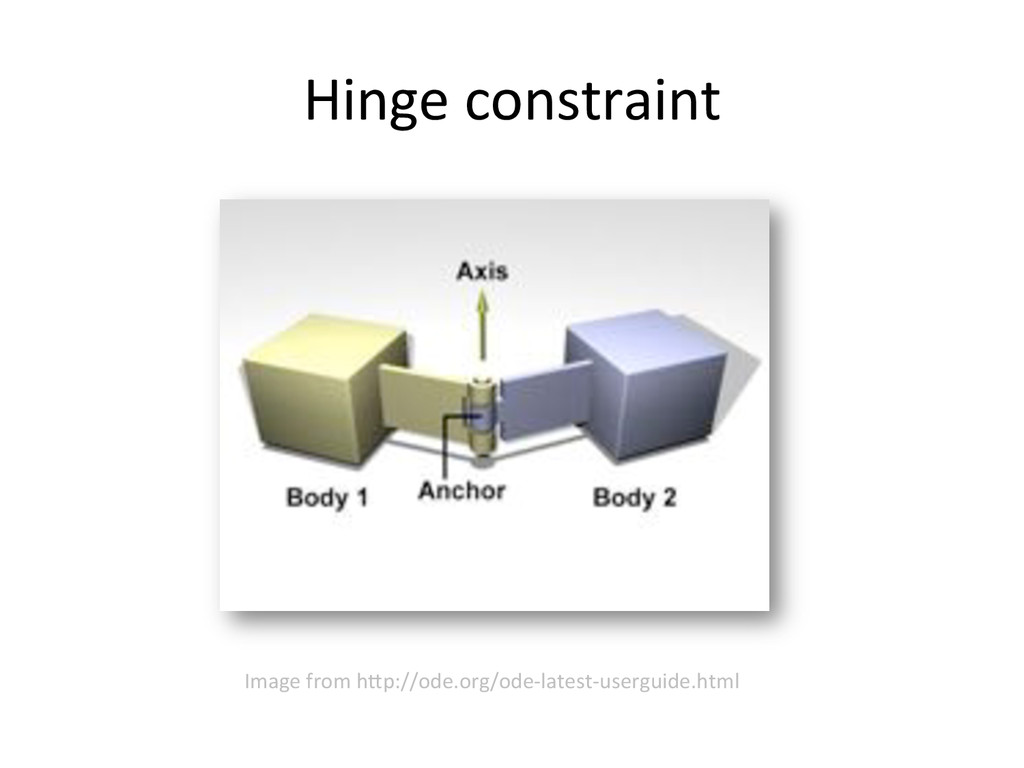
![Add)hinge)constraints) localA = btTransform(vQ, vBoneOrigin); localB = bodies[3+3*i]->getWorldTransform().inverse() * bodies[0]->getWorldTransform()](https://files.speakerdeck.com/presentations/e1829918a9534d518ca598fcb0dcc90d/slide_79.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Thank)you!) [email protected]) [email protected])) @sausheong) @1991bill)](https://files.speakerdeck.com/presentations/e1829918a9534d518ca598fcb0dcc90d/slide_103.jpg){kind=link}