Share
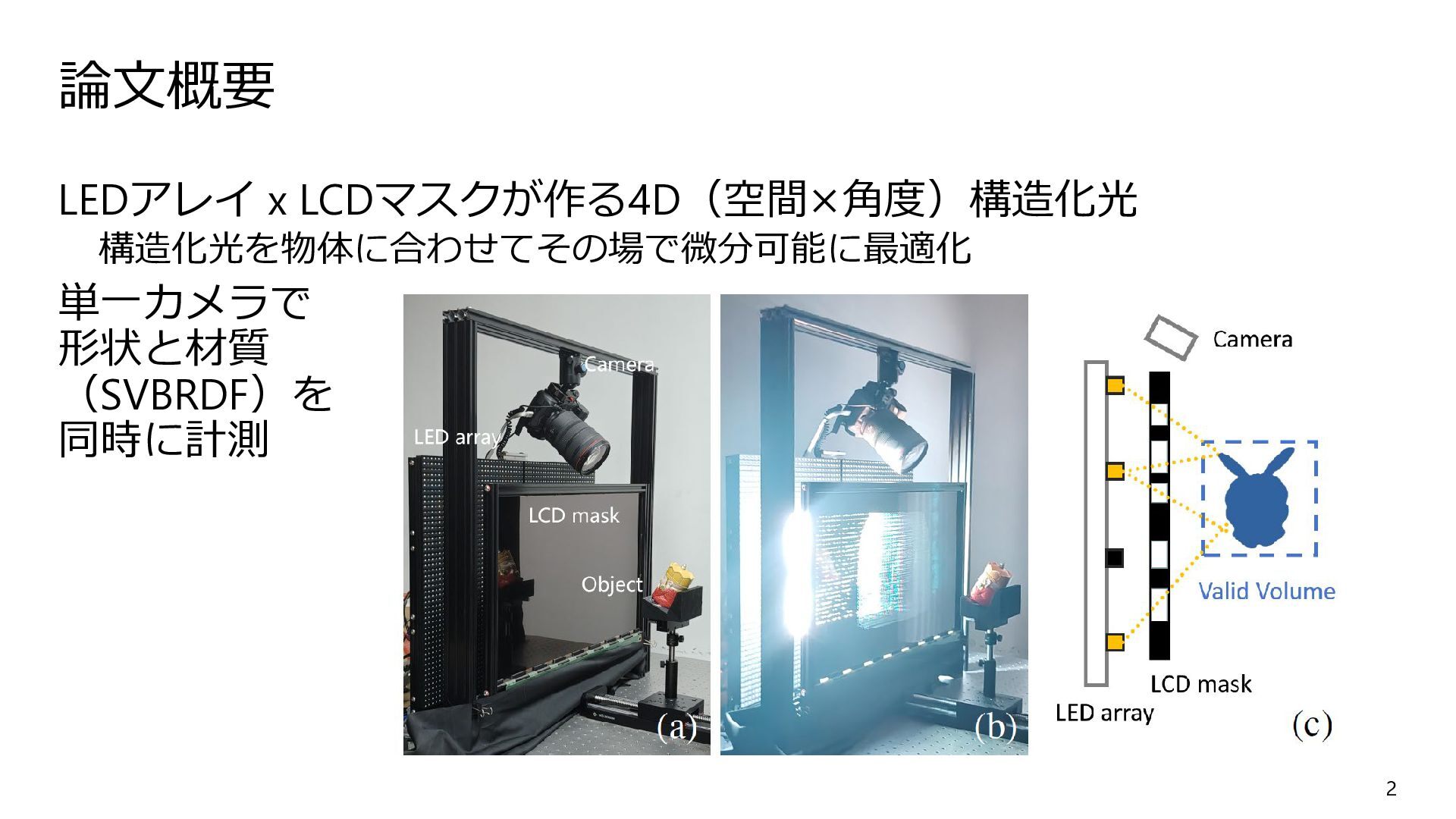
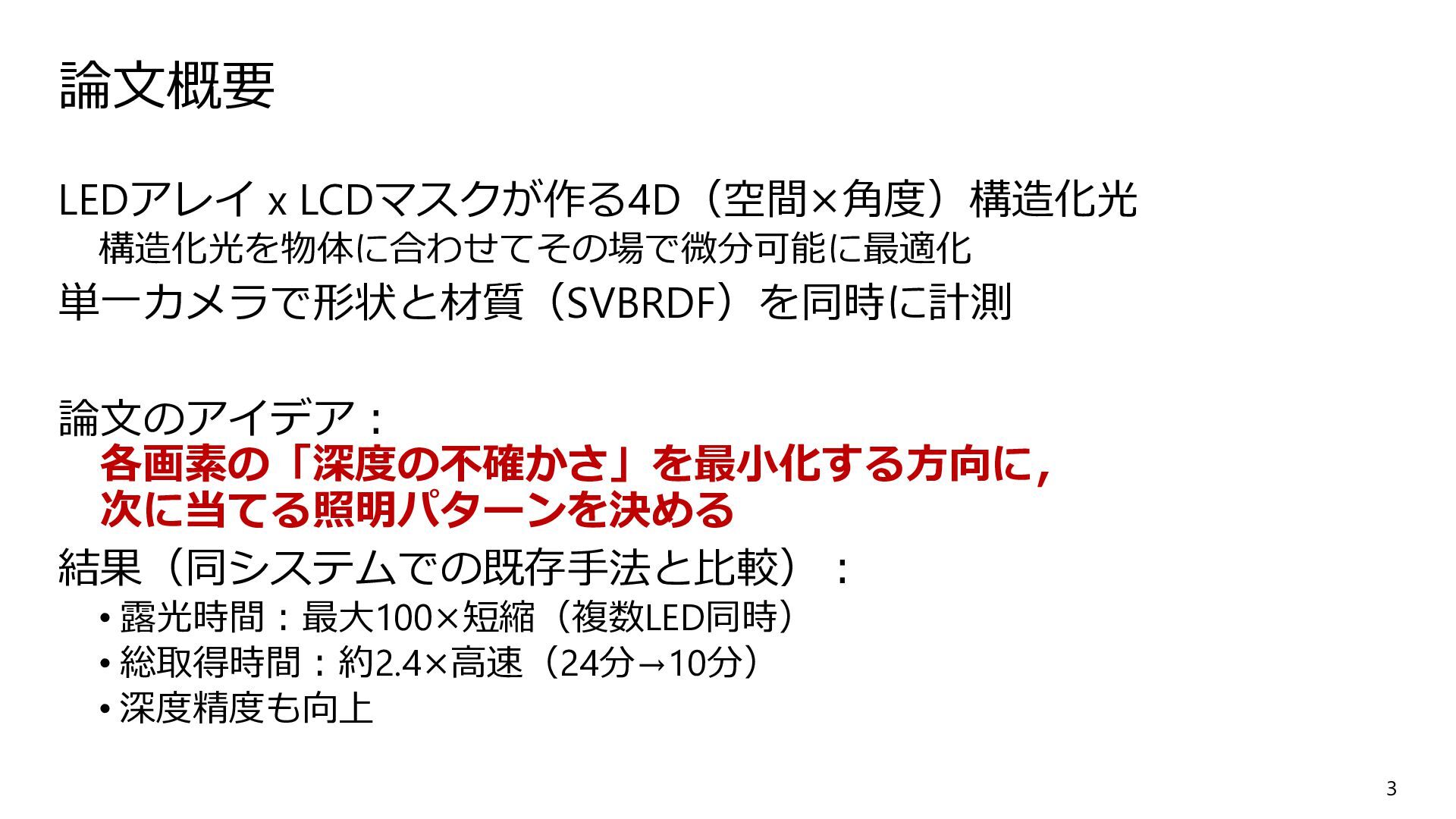
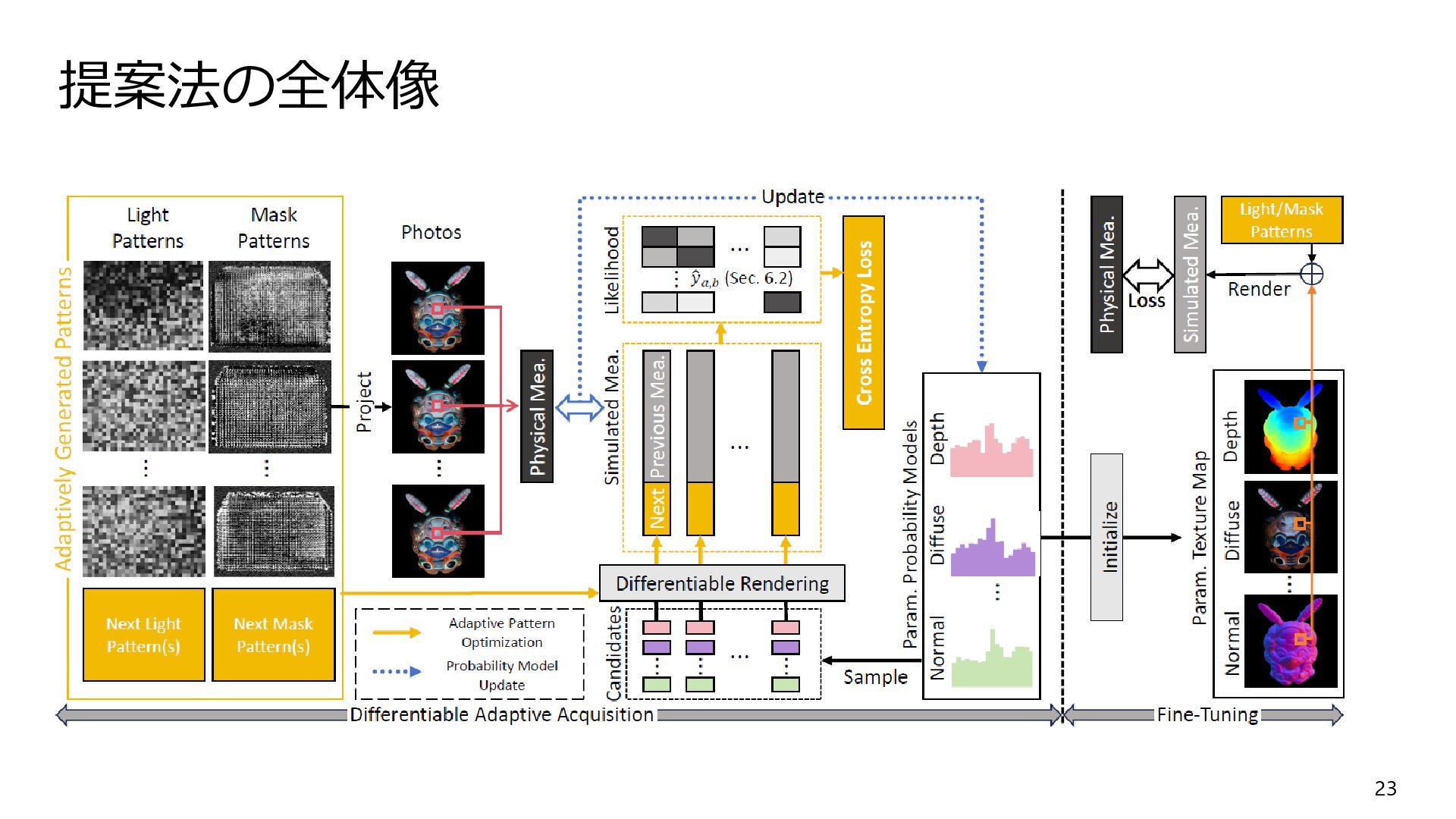
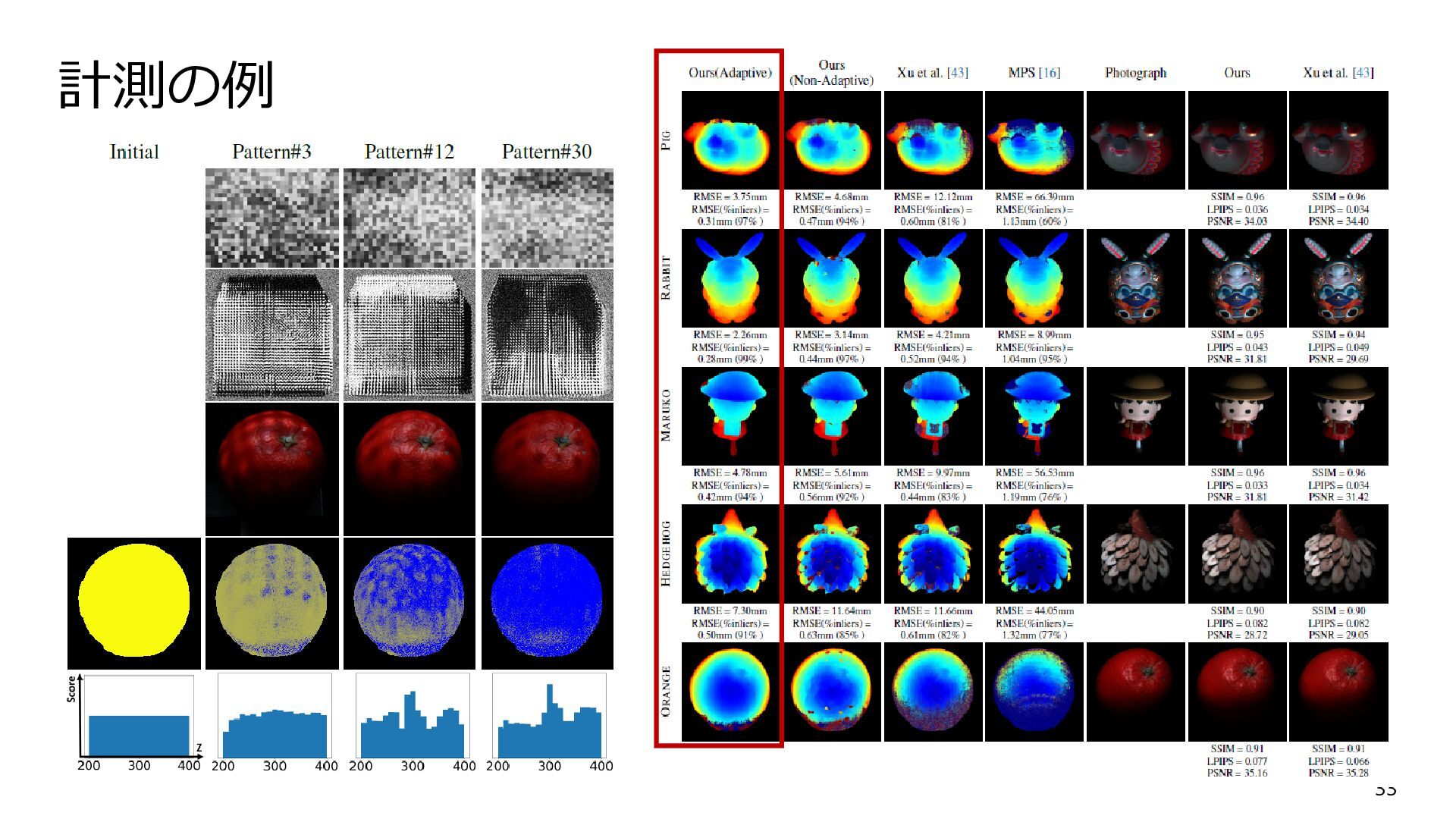
物体に合わせてLEDアレイ+LCDによる4D構造化照明を微分可能・適応的に最適化し,形状と材質を単一カメラで同時取得する手法を提案.微分可能レンダリングのアイデアを用い,深度の不確かさを最小化する次パターンを撮影しながら適応的に作り計測を行う.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![関連研究:パターンの作り方 微分可能最適化へ:DDPS(CVPR2024) • 微分可能なモデル+フォトメトリックステレオでパターンを最適化 • LCDモニタからの反射光で計測 12 [5] S. Choi+,](https://files.speakerdeck.com/presentations/f4e38ce2f67148439fca77f33912bdd8/slide_11.jpg){kind=link}
{kind=link}
{kind=link}
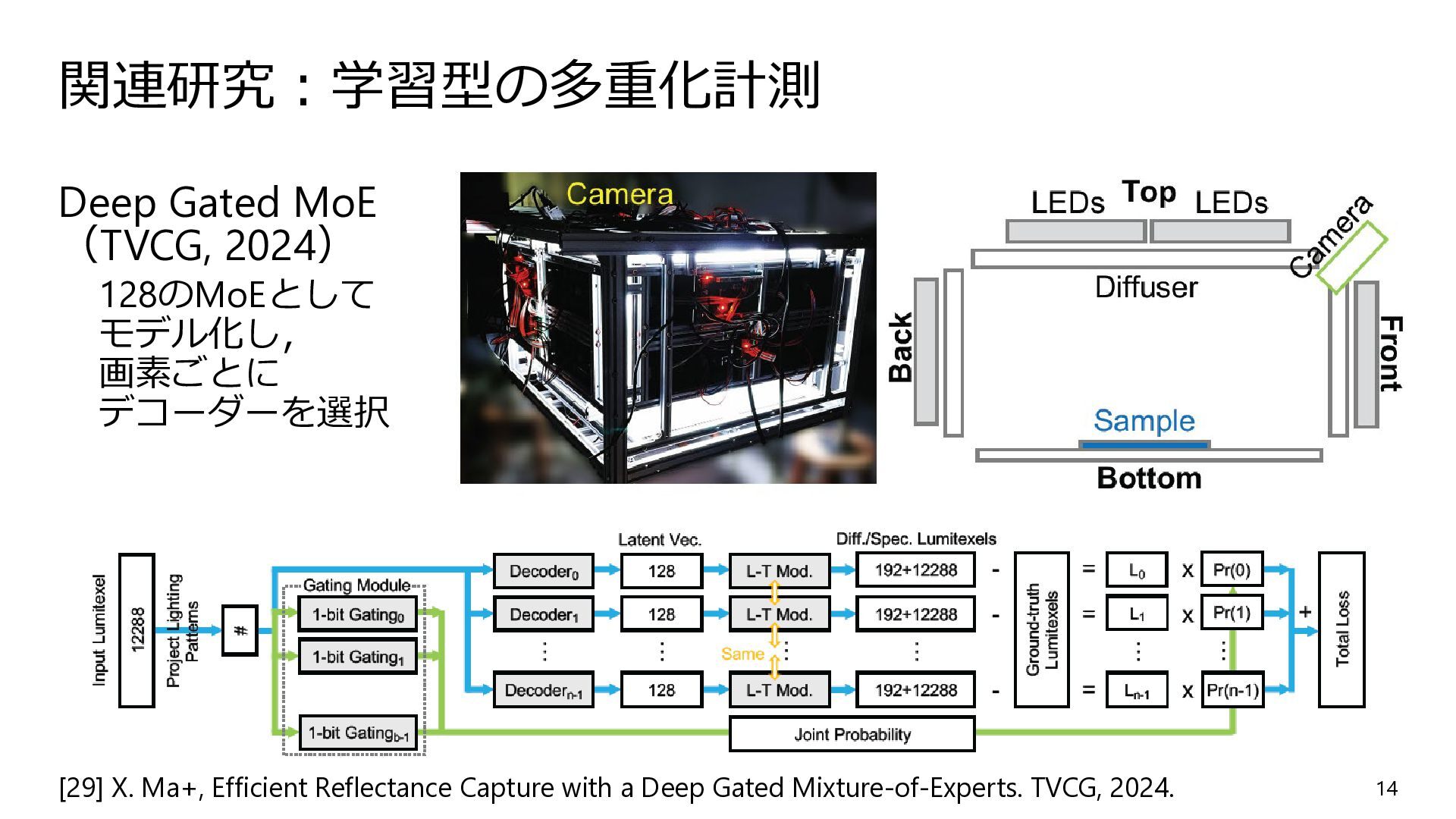
![関連研究:学習型の多重化計測 OpenSVBRDF(ToG, 2023) • SVBRDFの1,000点のデータベース • 本研究のBRDFのデータ元 15 [28] X.](https://files.speakerdeck.com/presentations/f4e38ce2f67148439fca77f33912bdd8/slide_14.jpg){kind=link}
![関連研究:学習型の多重化計測 Neural SI(CVPR2024) 動的な体積モデルに応用,プロジェクター+3視点で計測 16 [45] Y. Zeng+, Real-time Acquisition](https://files.speakerdeck.com/presentations/f4e38ce2f67148439fca77f33912bdd8/slide_15.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![テクニック的な部分 •前景分割:SAMで前景を選択 •各パターン画素は sigmoid で [0,1] に マスクは二値が理想なので,大きい値を掛けてから sigmoid •バッチ計測:一度3枚を同時最適化(24回×3枚=72枚)](https://files.speakerdeck.com/presentations/f4e38ce2f67148439fca77f33912bdd8/slide_31.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}