Uncalibrated Structure from Motion on a Sphere (ICCV 2025)
Uncalibrated Structure from Motion on a Sphere (ICCV2025)
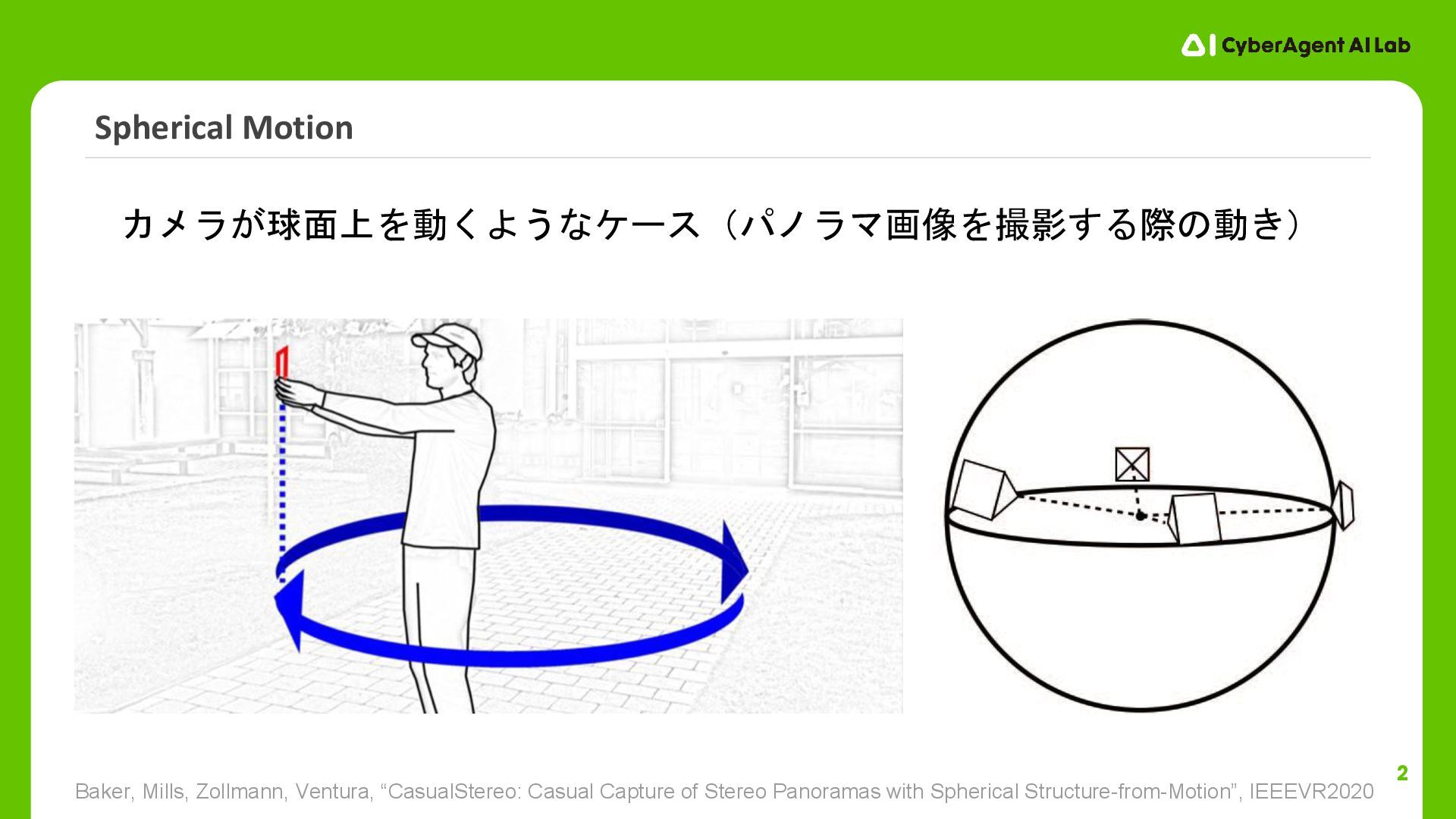
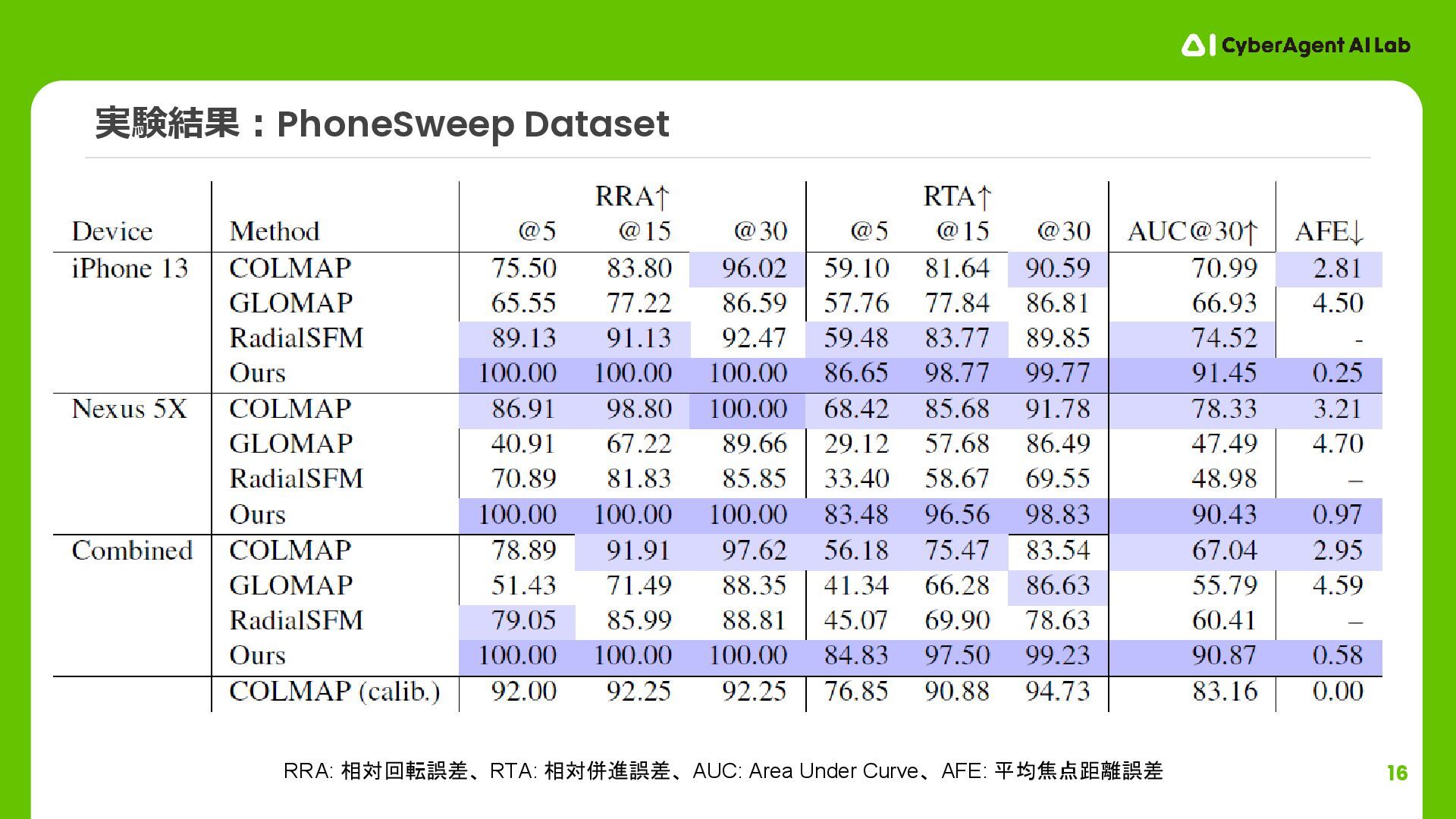
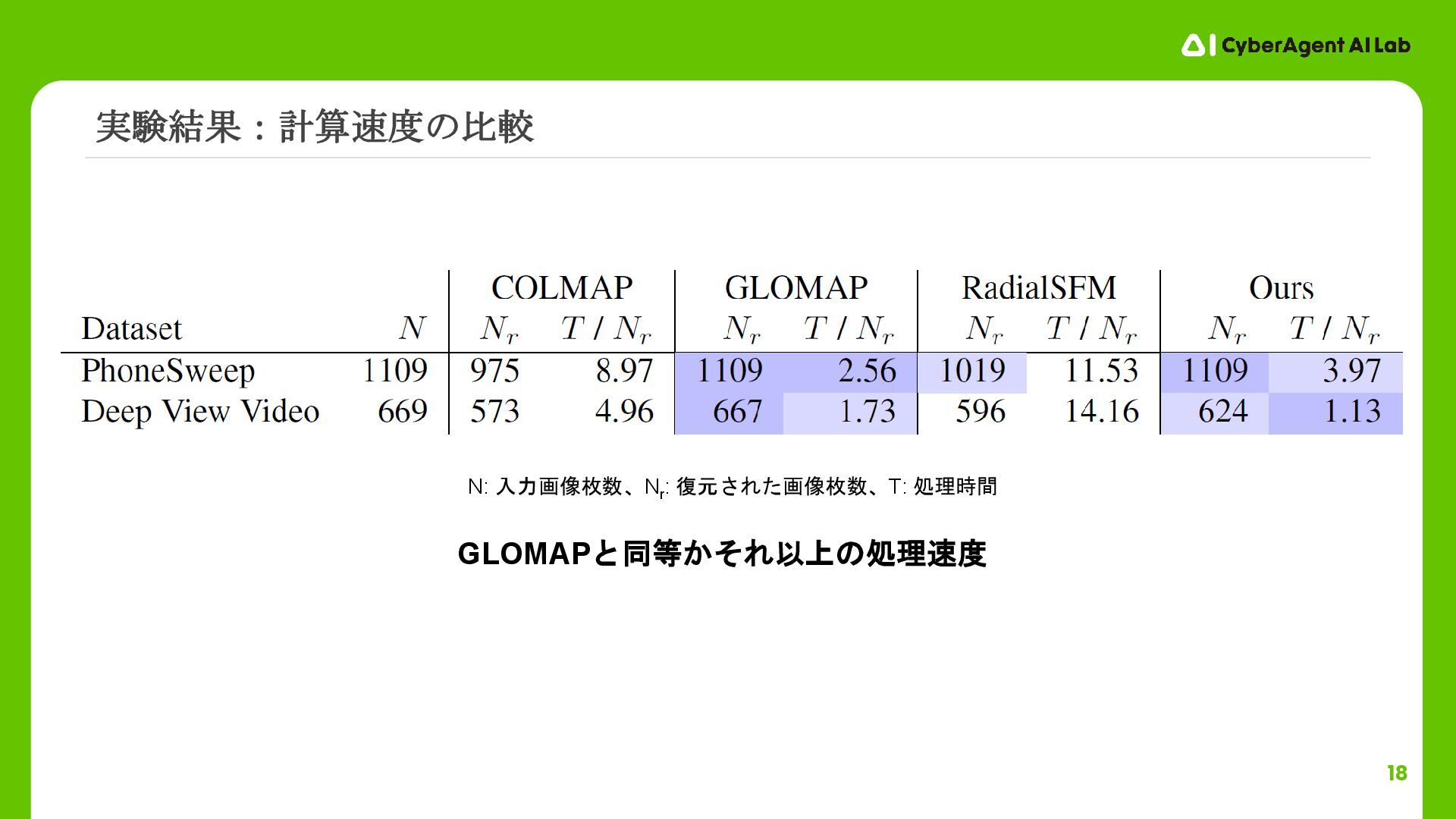
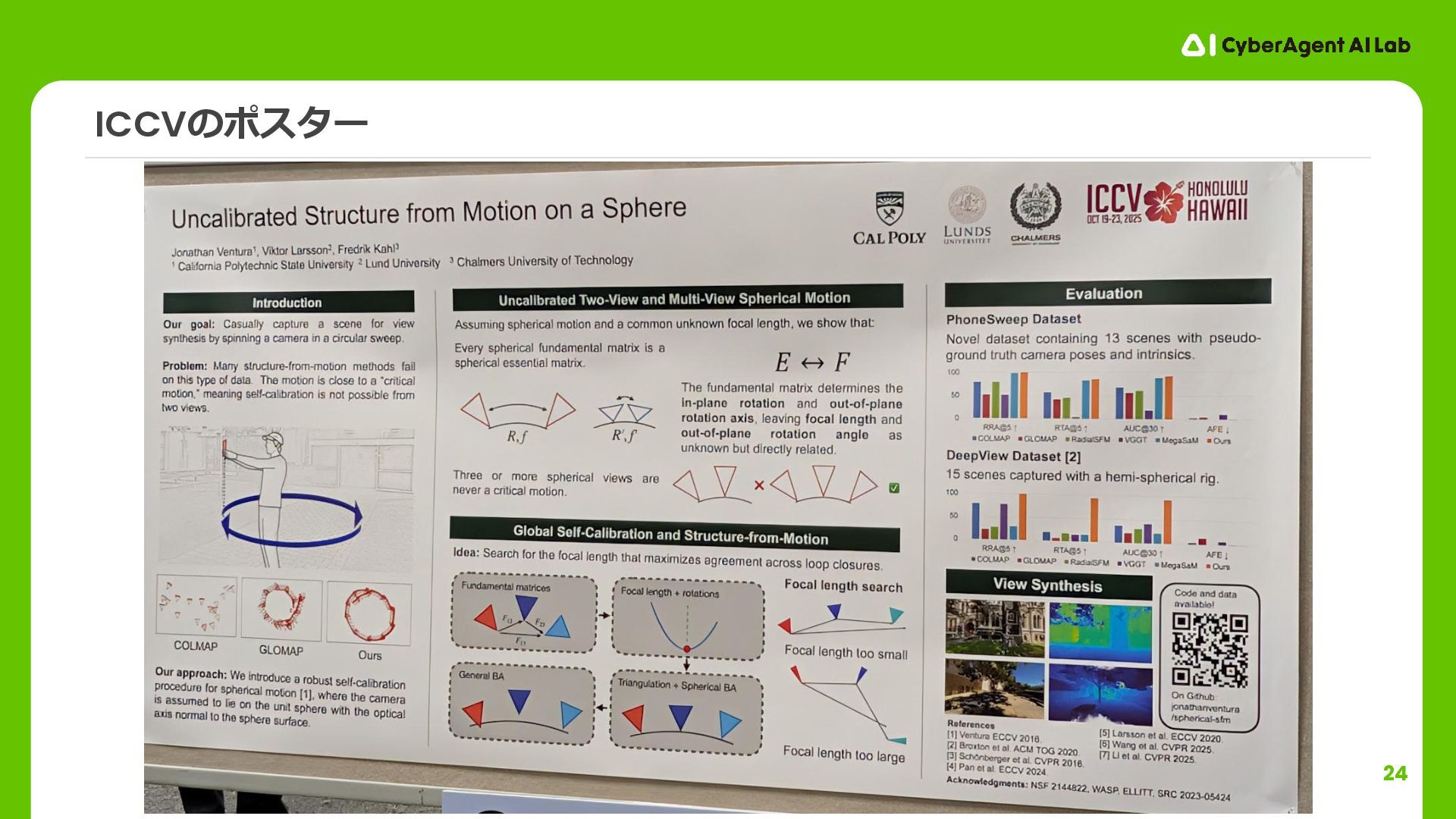
https://jonathanventura.github.io/spherical-sfm/ 回転運動(Spherical Motion)撮影された未校正カメラ画像に対するStructure from Motionにおいて球面拘束を用いた初期化および復元パイプラインを提案。
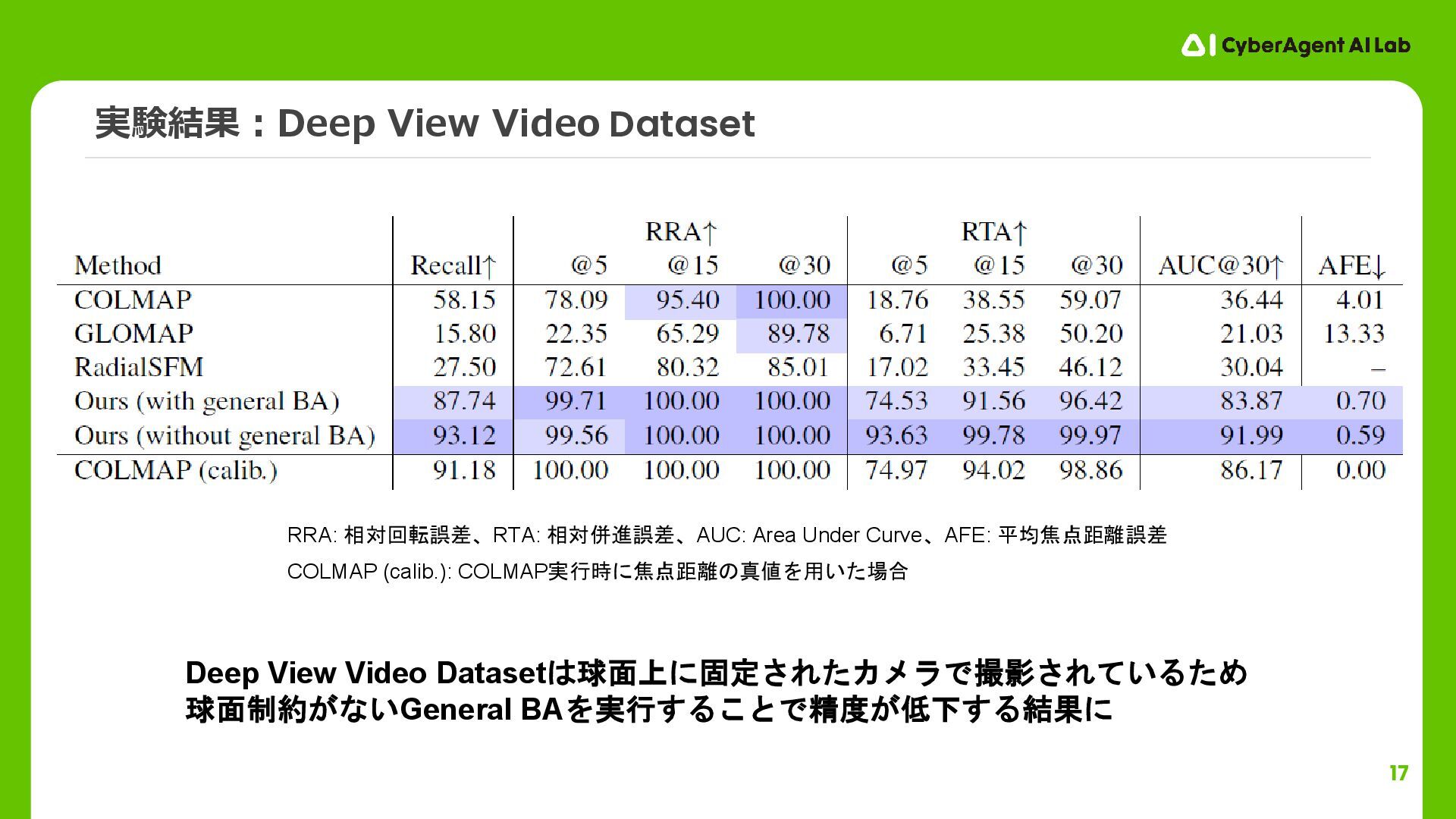
Video dataset 実データでの実験 Michael Broxton, John Flynn, Ryan Overbeck, Daniel Erickson, Peter Hedman, Matthew DuVall, Jason Dourgarian, Jay Busch, Matt Whalen, and Paul Debevec. Immersive Light Field Video with a Layered Mesh Representation. ACM Transactions on Graphics, 39(4), 2020.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![8 Critical Motionとなりうる運動(Kahl [19], Sturm [34]) • 全てのカメラが同一の光軸上を運動している場合 →今回の場合は該当しないので大丈夫 •](https://files.speakerdeck.com/presentations/d9b551cb5ae746f3a905050c10a2e5ea/slide_7.jpg){kind=link}
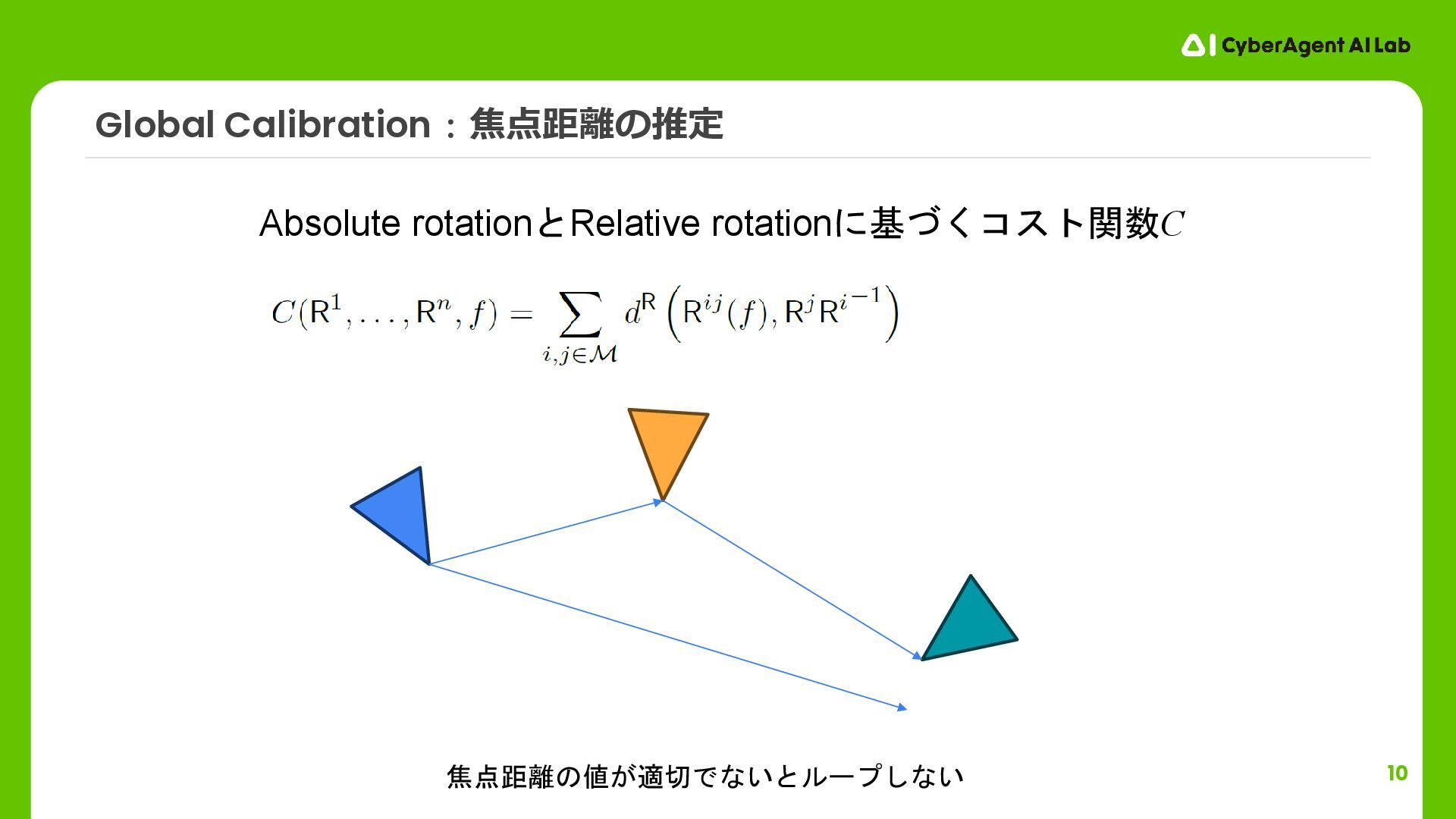
![9 Global Calibration:3点法による基礎行列推定 全てのペアに対して3点法[Ventura, ECCV2016]により基礎行列を推定 F13 F23 F12](https://files.speakerdeck.com/presentations/d9b551cb5ae746f3a905050c10a2e5ea/slide_8.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}