Share
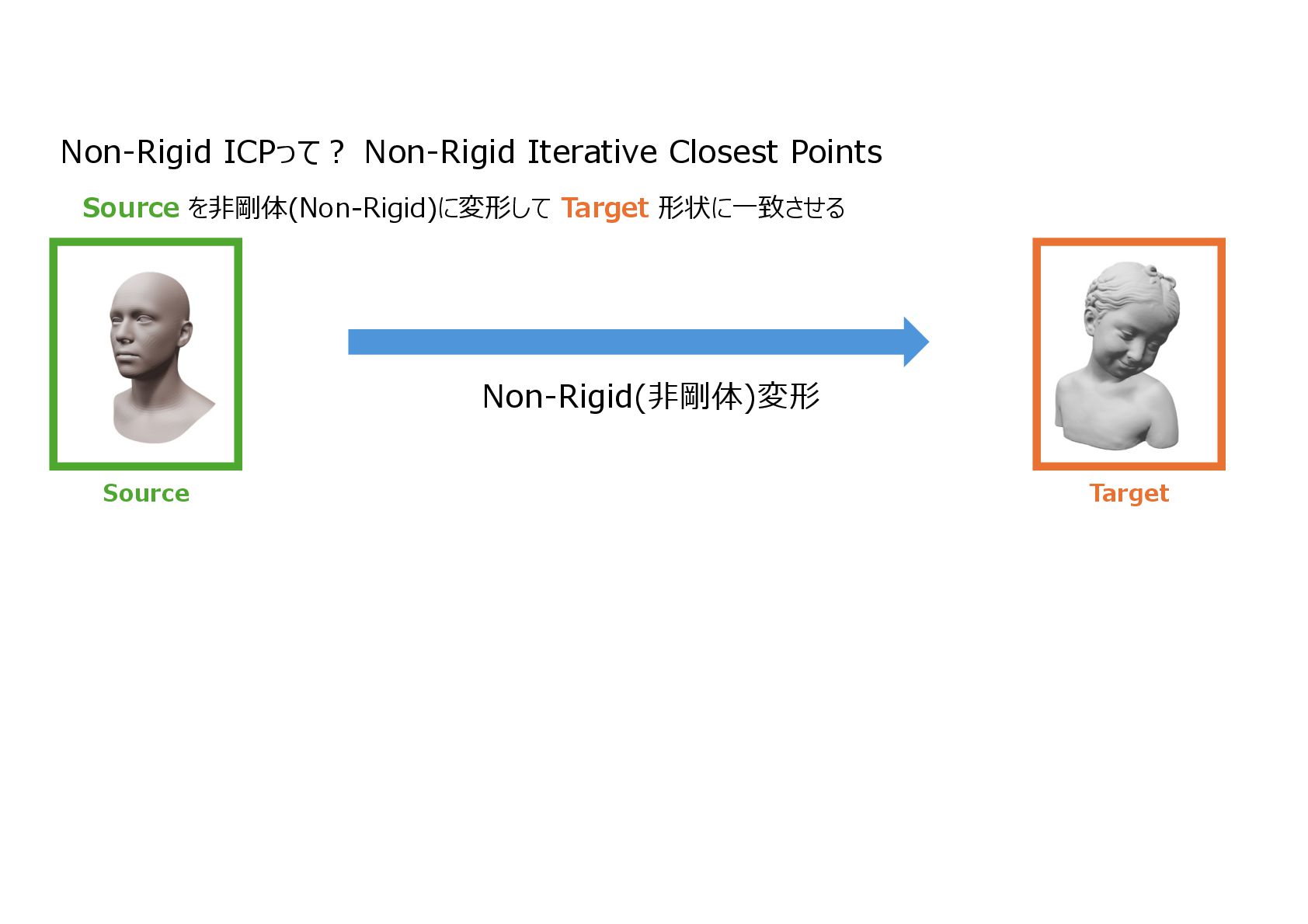
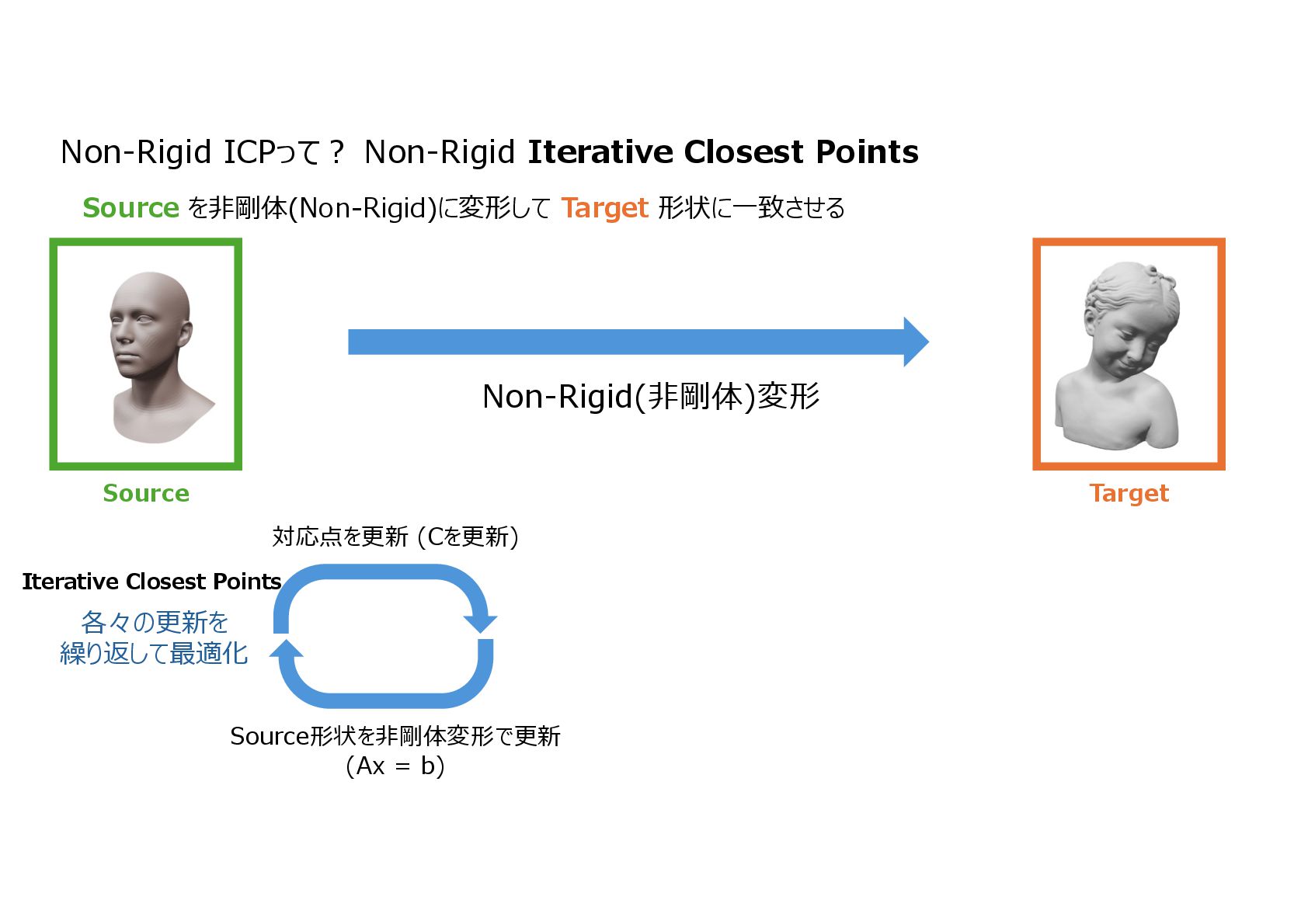
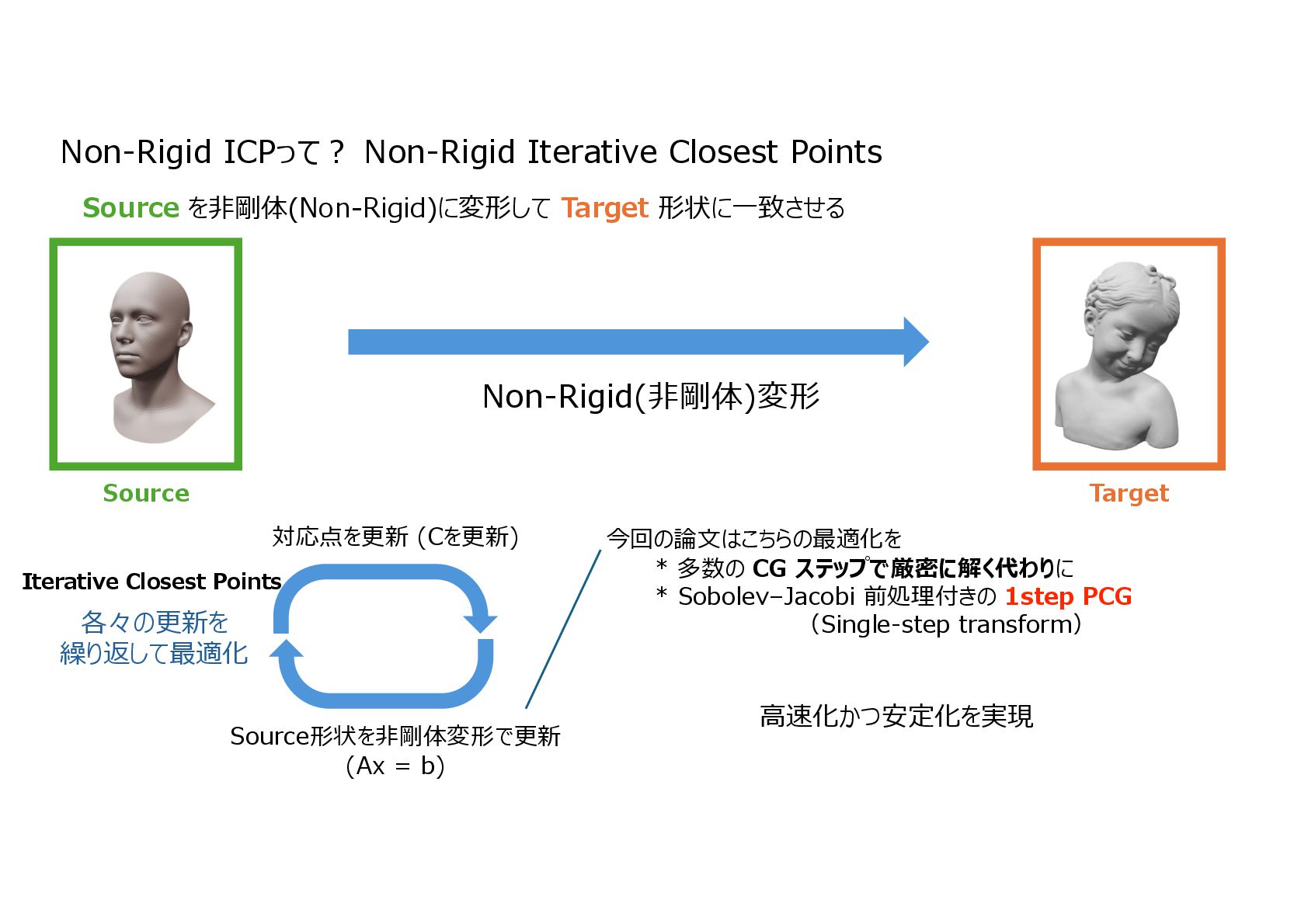
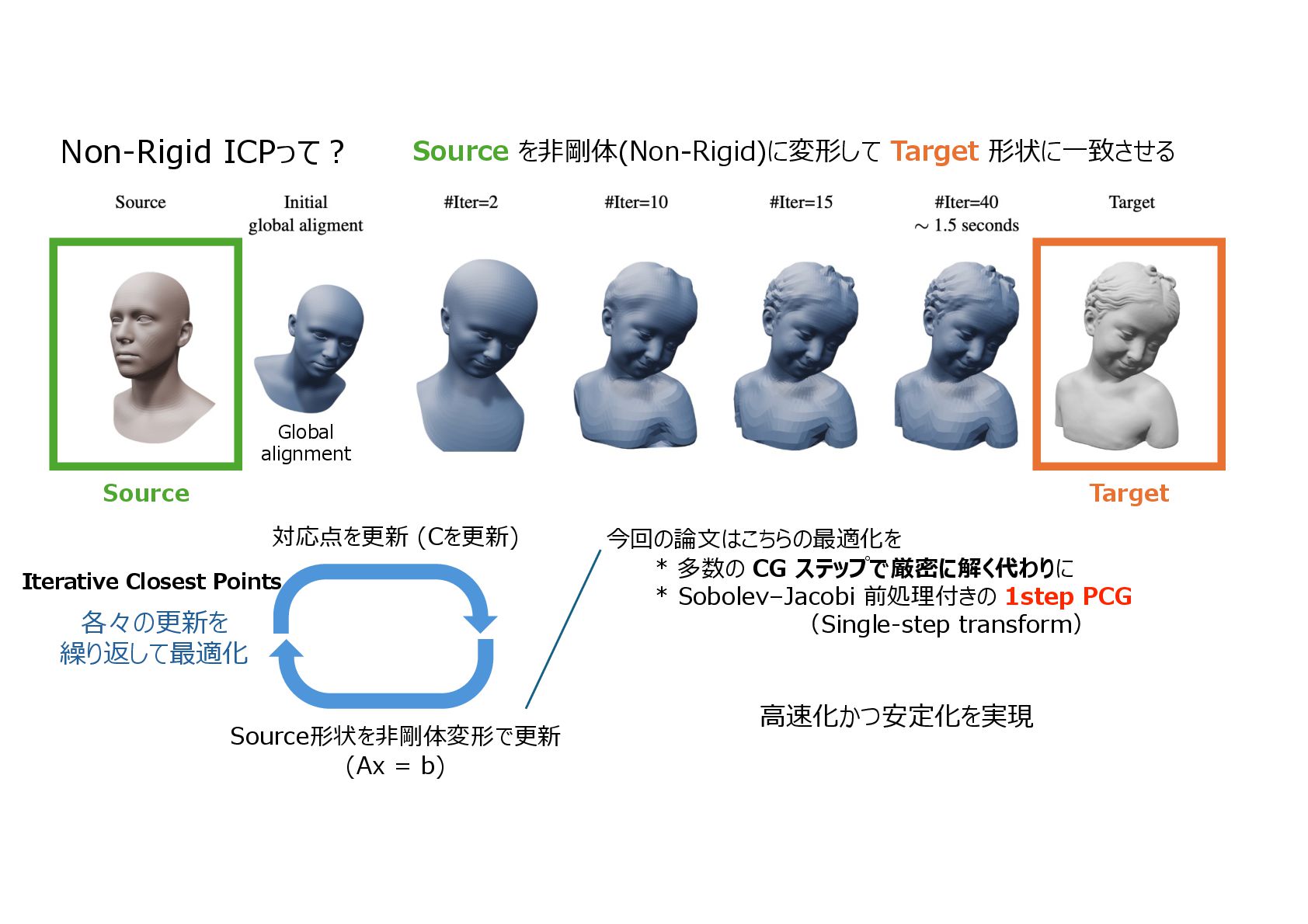
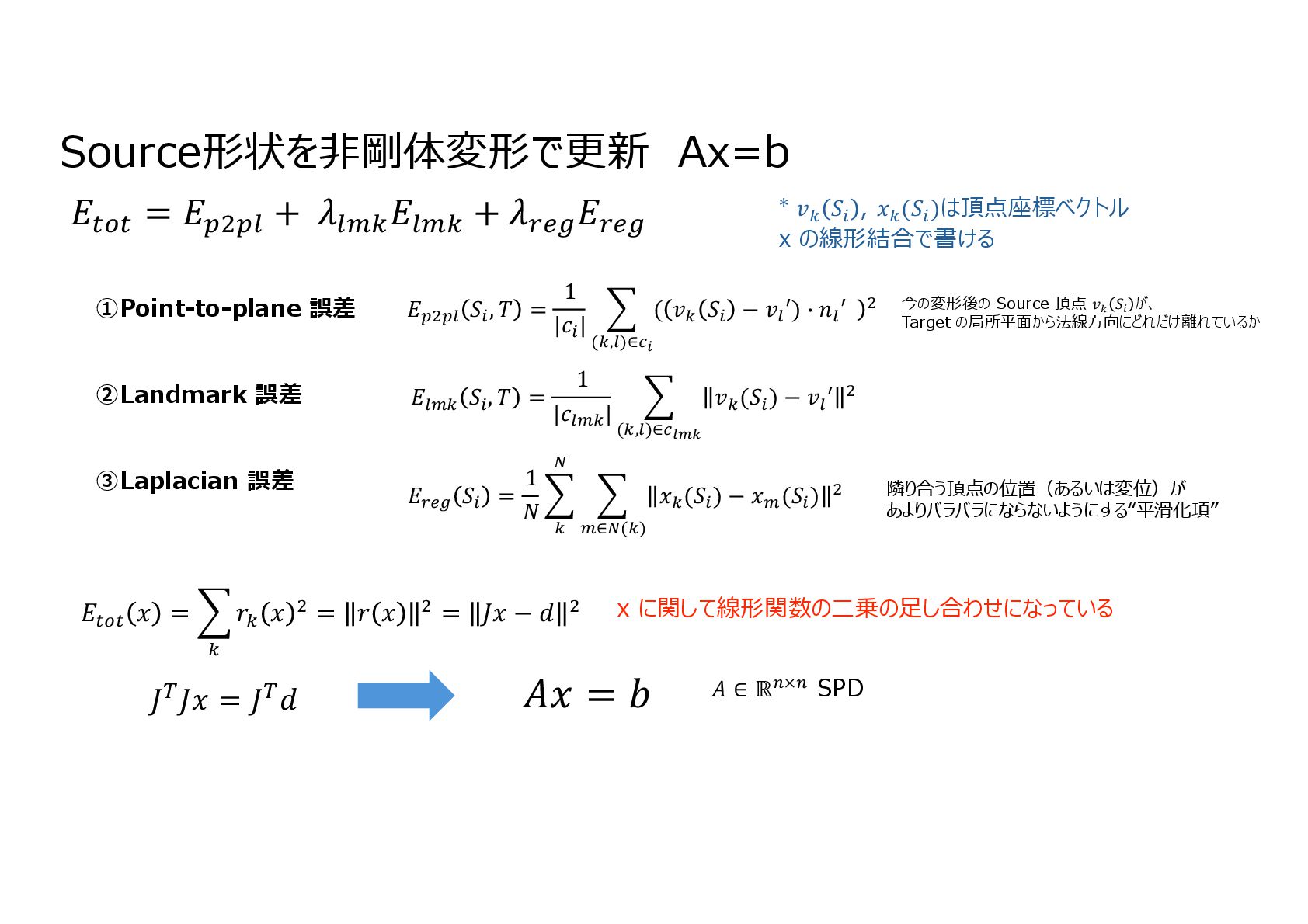
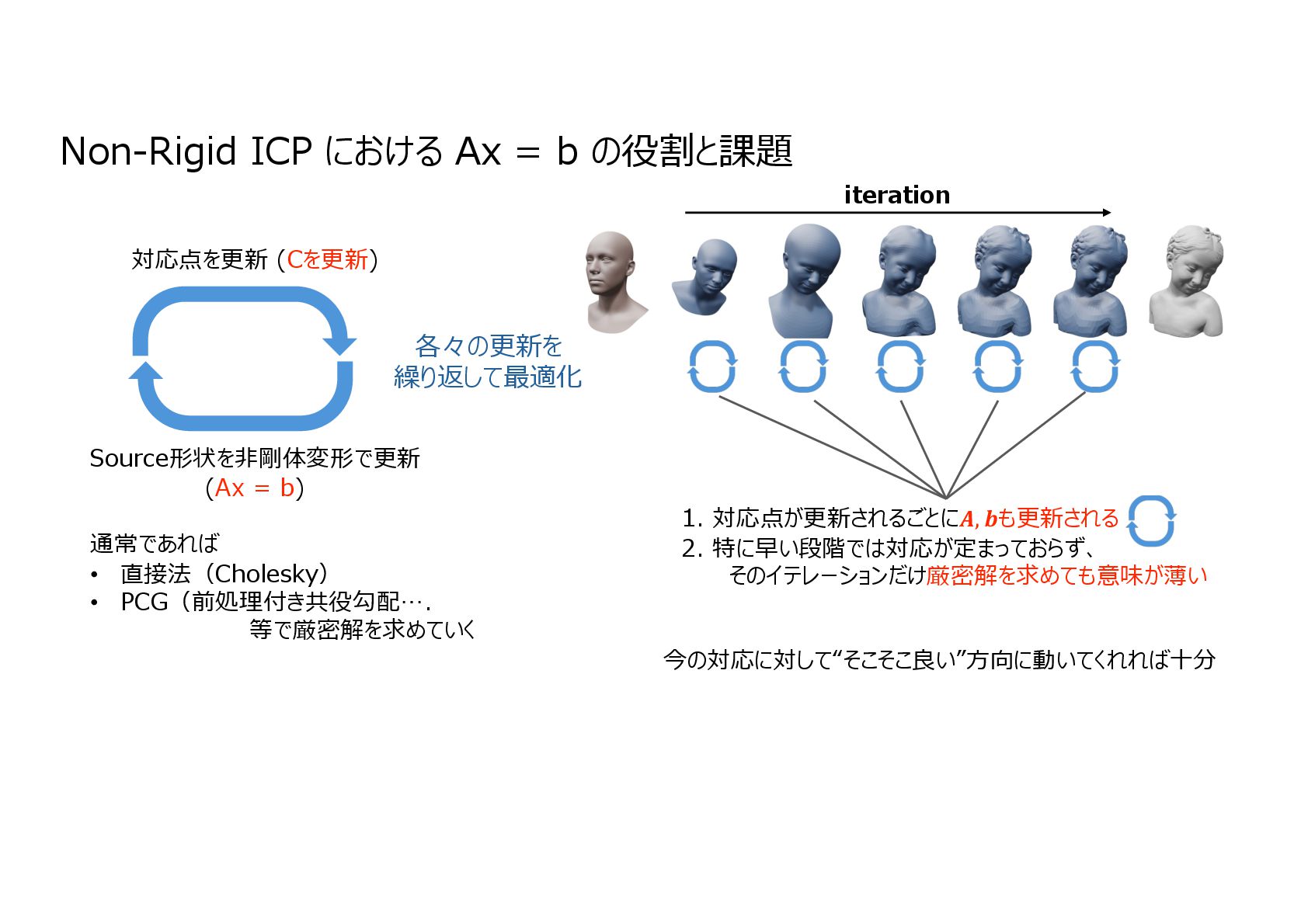
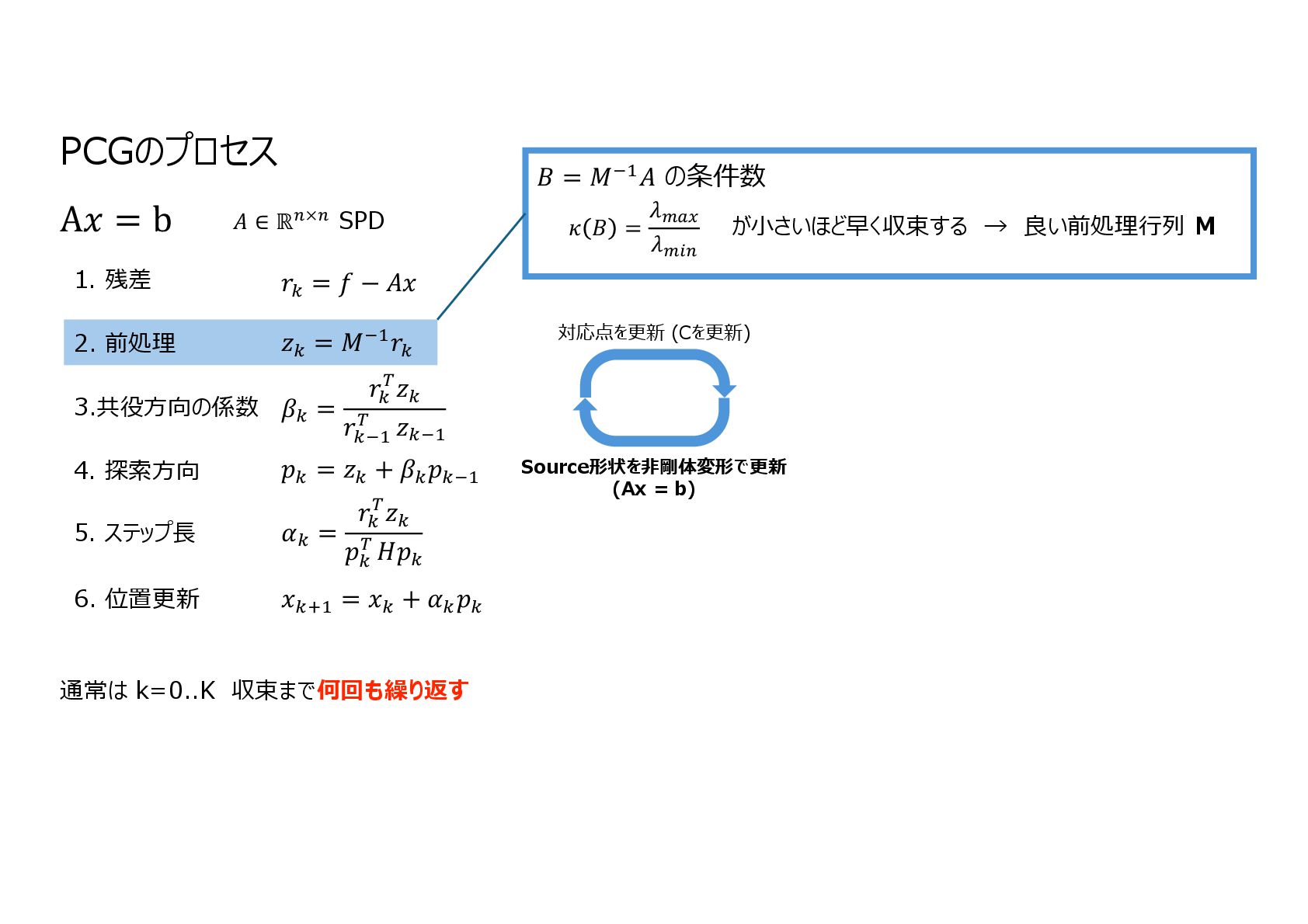
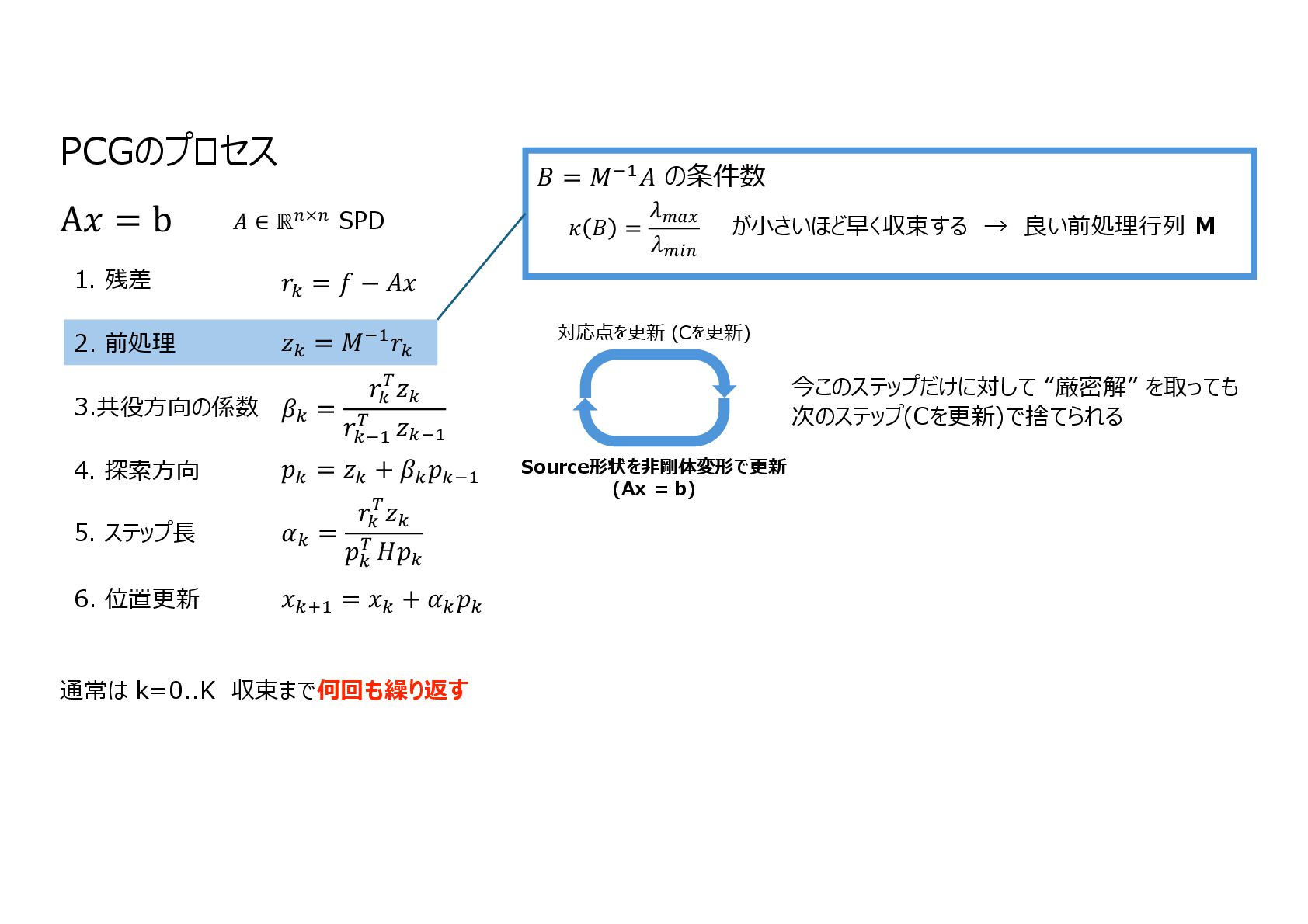
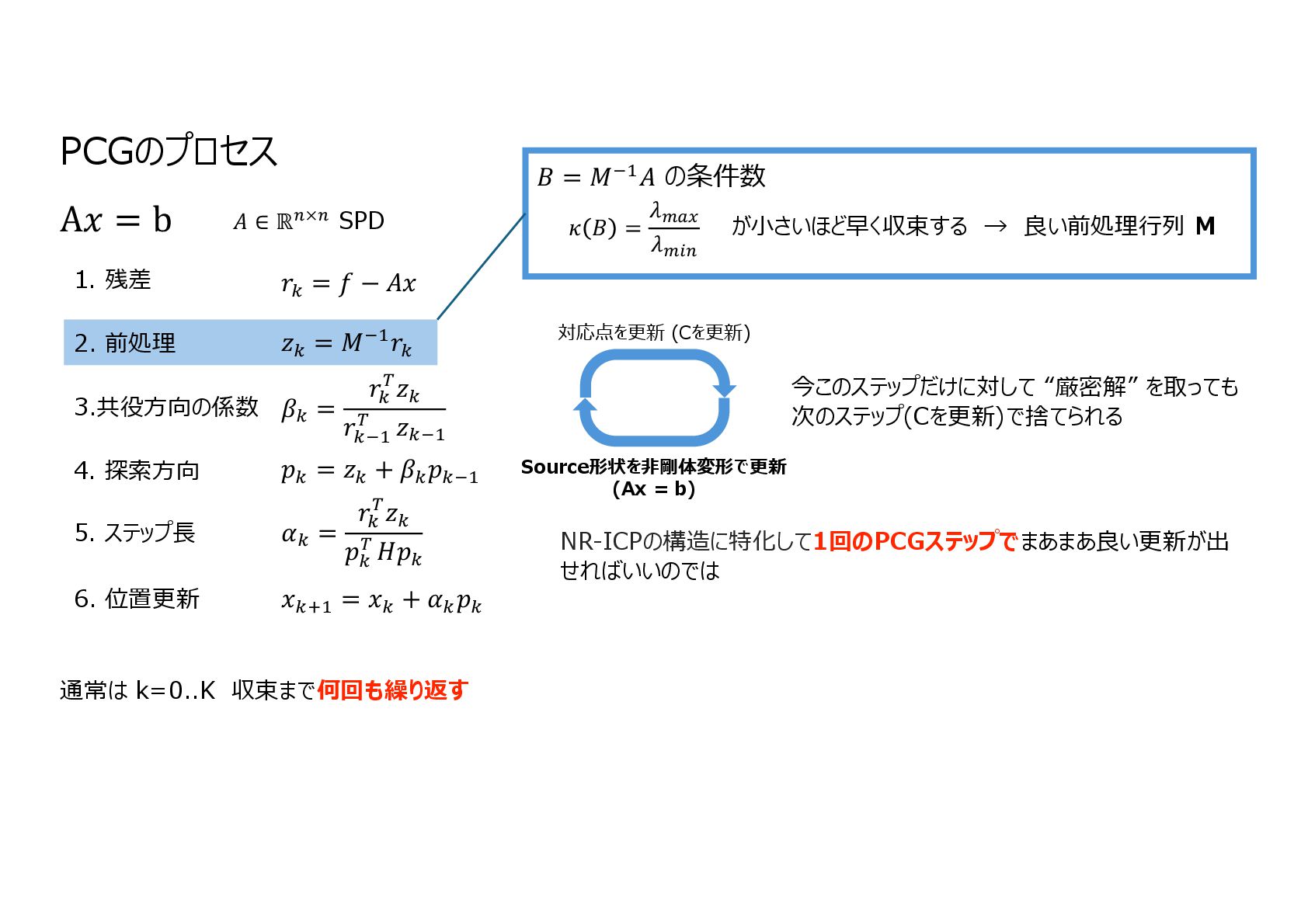
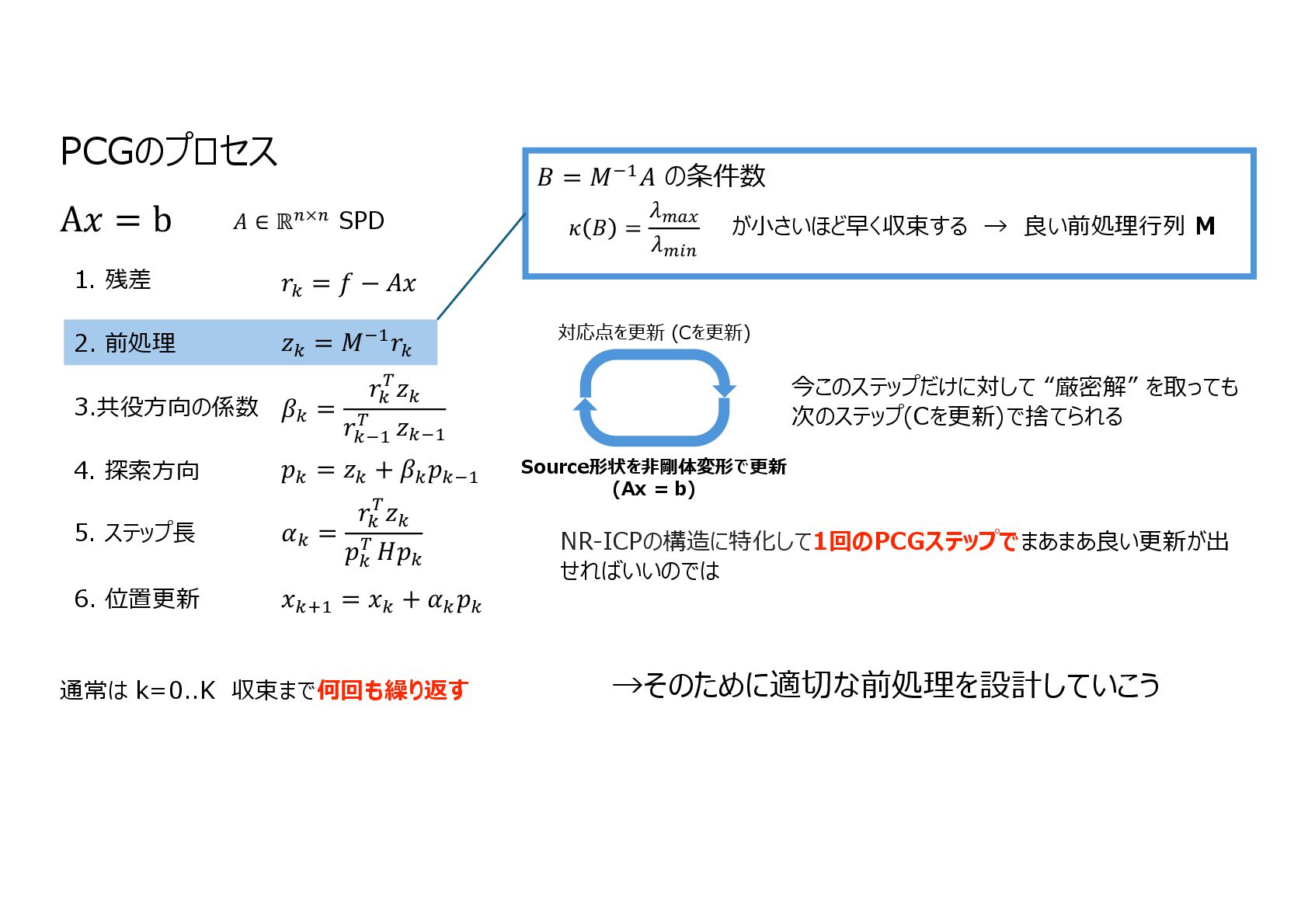
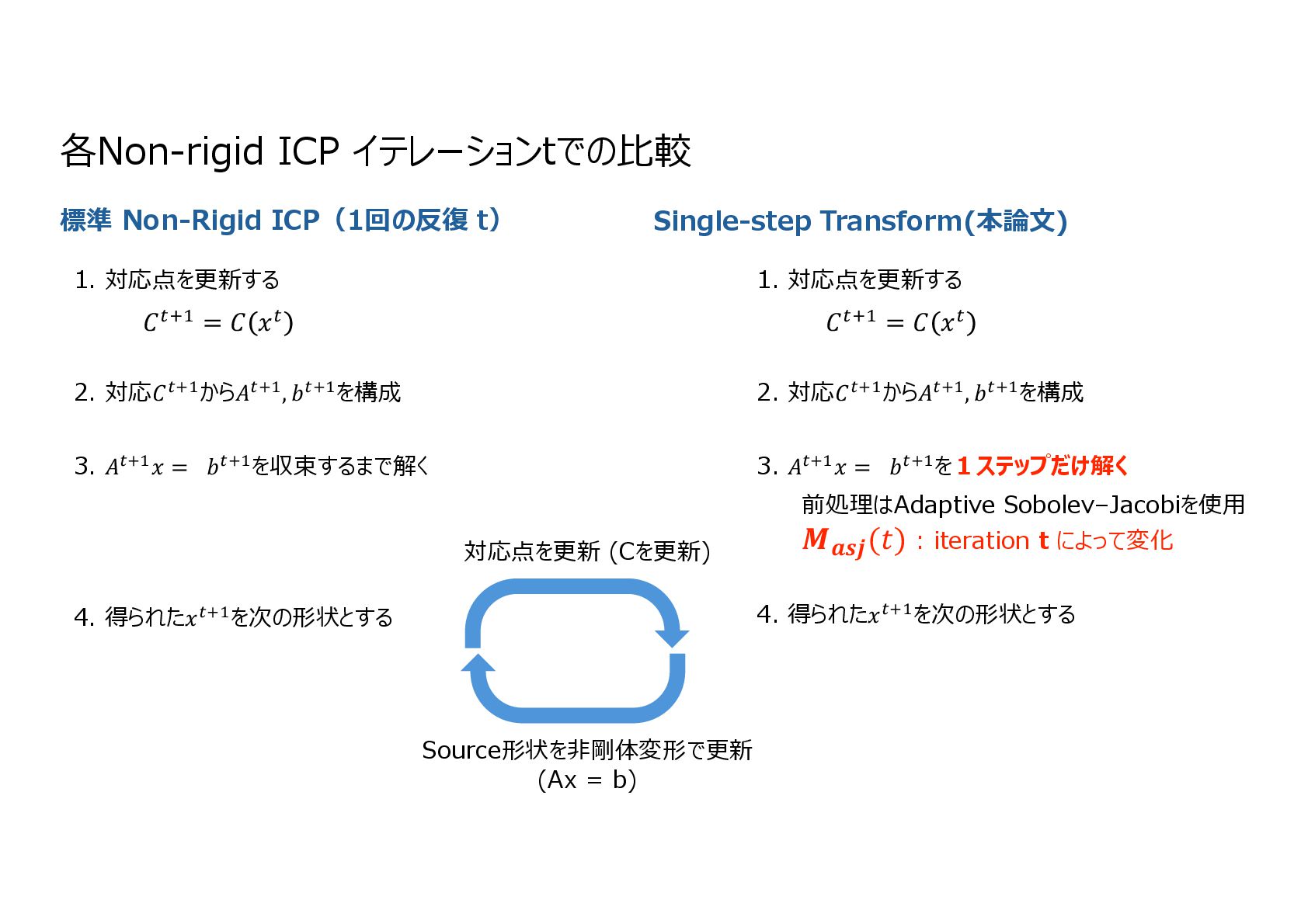
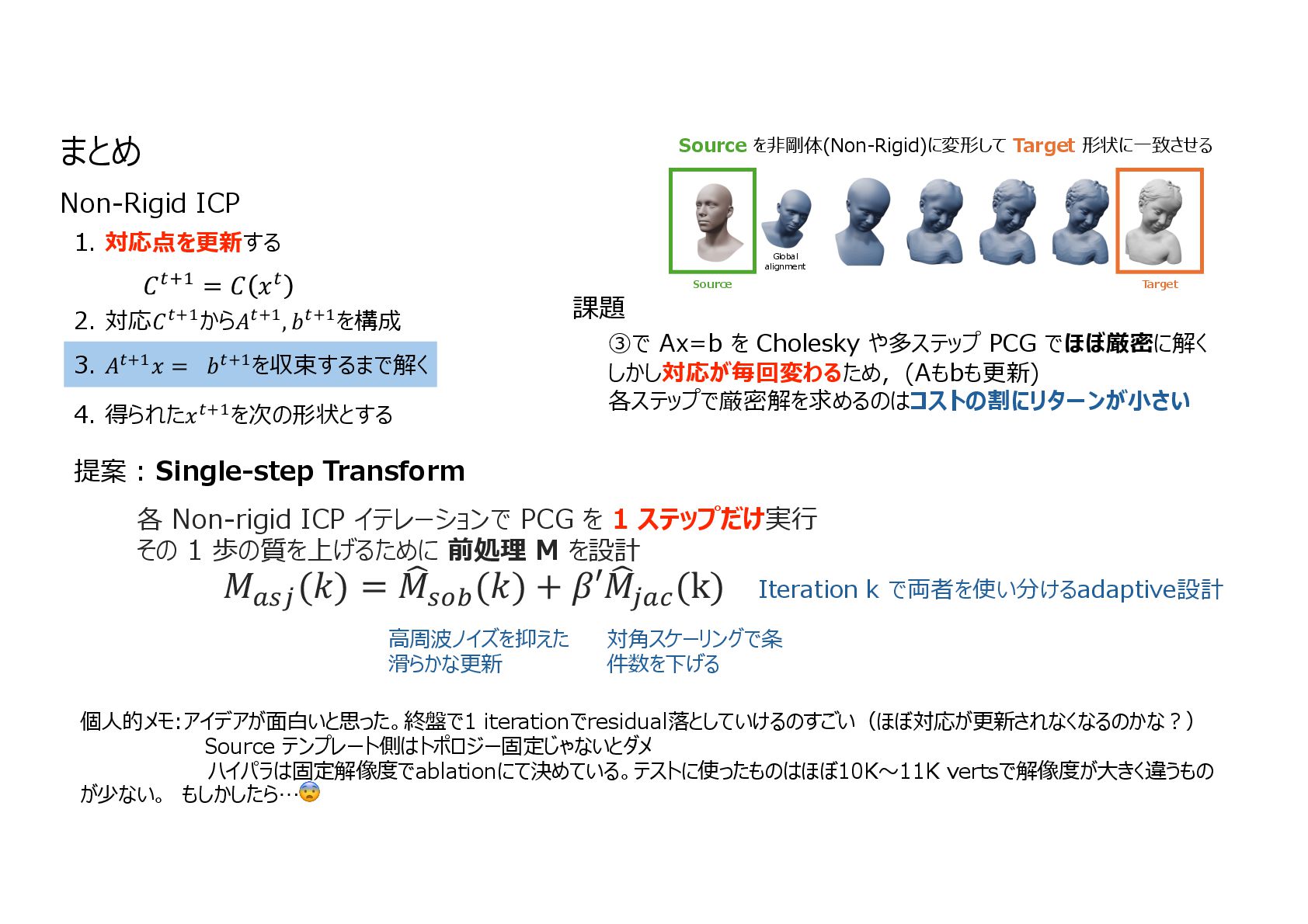
Non-rigid(非剛体)ICPは対応探索と形状更新を反復する手法であり、形状更新では一般に平滑化正則化を含む線形最小二乗問題を解いてターゲット形状へ近づける。 しかし初期反復では対応が不正確であるため、各反復で線形最小二乗を高精度に解くことは計算的に非効率になる。 本研究は、各反復で厳密解を求める代わりに、共役勾配法(CG)を1ステップのみ実行して変形を更新するsingle-step transform枠組みを提案する。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![3DCaricShop での精度・速度⽐較 [table 1] Quasi-Newton NR-registration 3DCaricShopのベースライン Neural Deformation Pyramid](https://files.speakerdeck.com/presentations/8221d56cfece4c3eadcd83ed10262eec/slide_17.jpg){kind=link}
![前処理ごとの single-step NR-ICP の性能⽐較 [table 2] 3DCaricShop のアーティストメッシュ 10 個をターゲットに使⽤](https://files.speakerdeck.com/presentations/8221d56cfece4c3eadcd83ed10262eec/slide_18.jpg){kind=link}
![各前処理付き single-step NR-ICP の収束曲線 [Fig 4] Jacobi単体は 最初下がるが頭打ち 序盤からスムーズに残差が 落ちる](https://files.speakerdeck.com/presentations/8221d56cfece4c3eadcd83ed10262eec/slide_19.jpg){kind=link}
![⽋損メッシュをtargetにした場合(sourceは同じ姿勢のテンプレートメッシュ* [Fig 6/7]) Hole付近の三⾓形は境界に引っ張られる⼒が残るので ちょっと歪むがおおむねいい感じに ⽋損していても、もともとそこには連続な⾯があった うまくいかないケース うまくいくケース ⾜の部分が覆われることはなく崩れている ⽳の境界が形状の本来の境界/鋭いエッジに沿っている](https://files.speakerdeck.com/presentations/8221d56cfece4c3eadcd83ed10262eec/slide_20.jpg){kind=link}
![ガウシアンノイズを与えた結果[Fig 5] 𝜎 = 10% 𝜎 = 30% Targetにガウシアンノイズを付与した結果 (Sourseは球メッシュ)](https://files.speakerdeck.com/presentations/8221d56cfece4c3eadcd83ed10262eec/slide_21.jpg){kind=link}
![Face template をソースメッシュとして変形[Fig 11] 顎が消えてる ディティールが消えてる 位置はいい感じだけど滑らかさがない *参考 こちらは平均値です](https://files.speakerdeck.com/presentations/8221d56cfece4c3eadcd83ed10262eec/slide_22.jpg){kind=link}
![Sphere meshをソースとして変形 [Fig 12] 多くのケースで失敗 Sphere startに特化した⼿法と同等の結果だがoursが早い *参考 こちらは平均値です Sphere](https://files.speakerdeck.com/presentations/8221d56cfece4c3eadcd83ed10262eec/slide_23.jpg){kind=link}
{kind=link}