Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
mBot教學(6)光感測器應用
Search
Sponsored
·
Ship Features Fearlessly
Turn features on and off without deploys. Used by thousands of Ruby developers.
→
Wu, ShyiShiou
November 17, 2016
Programming
790
0
Share
mBot教學(6)光感測器應用
mBot光感測器原理、控制指令及應用實例
Wu, ShyiShiou
November 17, 2016
More Decks by Wu, ShyiShiou
See All by Wu, ShyiShiou
使用Evernote雲端筆記本
sswu
0
85
Unity遊戲程式設計(04) 2D移動與碰撞處理I
sswu
0
1.4k
Unity遊戲程式設計(01) Unity簡介
sswu
0
530
Unity遊戲程式設計(02) 應用2D圖片物件
sswu
0
1.1k
Unity遊戲程式設計(03) 製作及應用2D動畫
sswu
0
1.4k
Other Decks in Programming
See All in Programming
新規プロダクトを高速で生み出すハーネスエンジニアリング
seanchas116
3
190
PHPer、Cloudflare に引っ越す
suguruooki
2
230
AI Agent と正しく分析するための環境作り
yoshyum
2
530
2026年のソフトウェア開発を考える(2026/05版) / Software Engineering Scrum Fest Niigata 2026 Edition
twada
PRO
23
13k
PHPでバイナリをパースして理解するASN.1
muno92
PRO
0
460
開発とはなにか、Essenceカーネルで見えるもの
ukin0k0
0
190
1人1案件のプロダクトエンジニア時代に、"プロセス監督"としてチャレンジしたこと
non0113
0
110
RailsTokyo 2026#4: AI様があれば、 Hotwireの弱点は消えるか?
naofumi
3
420
サーバーレスで作る、動画データ管理基盤
oyasumipants
0
220
Lightning-Fast Method Calls with Ruby 4.1 ZJIT / RubyKaigi 2026
k0kubun
3
3.2k
権限チェックの一貫性を型で守る TypeScript による多層防御
mnch
2
160
書き換えて学ぶTemporal #fukts
pirosikick
2
380
Featured
See All Featured
Stewardship and Sustainability of Urban and Community Forests
pwiseman
0
200
Making the Leap to Tech Lead
cromwellryan
135
9.8k
How to Think Like a Performance Engineer
csswizardry
28
2.6k
Why Your Marketing Sucks and What You Can Do About It - Sophie Logan
marketingsoph
0
140
Claude Code のすすめ
schroneko
67
220k
The Art of Delivering Value - GDevCon NA Keynote
reverentgeek
16
2k
How to optimise 3,500 product descriptions for ecommerce in one day using ChatGPT
katarinadahlin
PRO
1
3.6k
Distributed Sagas: A Protocol for Coordinating Microservices
caitiem20
333
22k
実際に使うSQLの書き方 徹底解説 / pgcon21j-tutorial
soudai
PRO
199
73k
What's in a price? How to price your products and services
michaelherold
247
13k
Context Engineering - Making Every Token Count
addyosmani
9
890
B2B Lead Gen: Tactics, Traps & Triumph
marketingsoph
0
120
Transcript
電子工程系應 用 電 子 組 電 腦 遊 戲 設
計 組 教學(6) 光感測器應用 吳錫修 Nov 17, 2016
shape the future 電子工程系應 用 電 子 組 電 腦
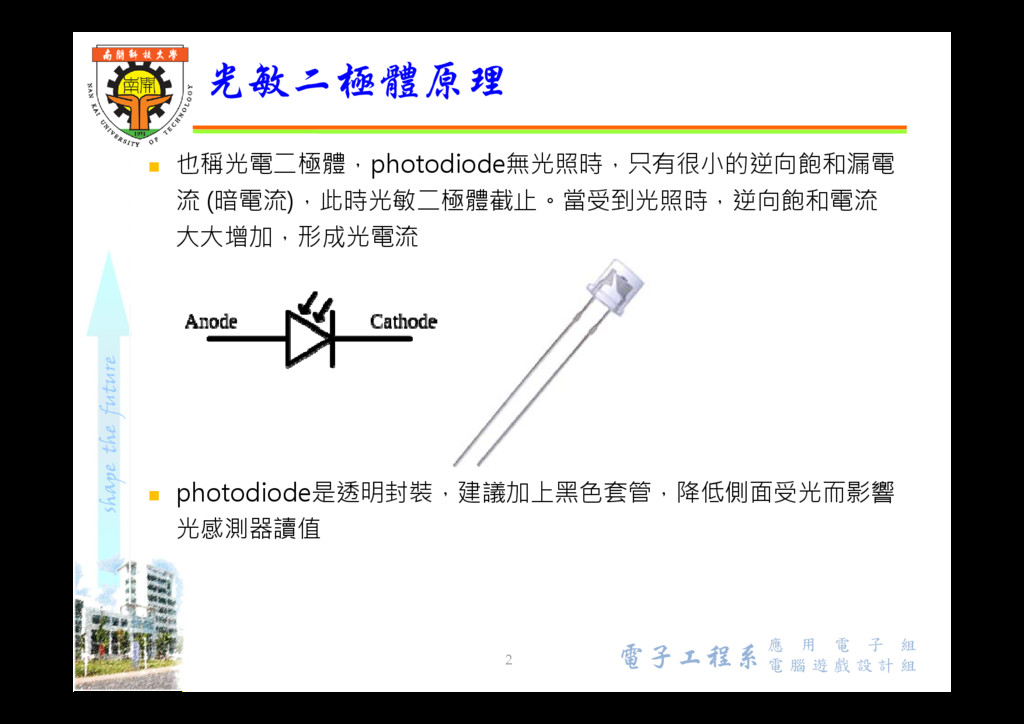
遊 戲 設 計 組 也稱光電二極體,photodiode無光照時,只有很小的逆向飽和漏電 流 (暗電流),此時光敏二極體截止。當受到光照時,逆向飽和電流 大大增加,形成光電流 photodiode是透明封裝,建議加上黑色套管,降低側面受光而影響 光感測器讀值 光敏二極體原理 2
shape the future 電子工程系應 用 電 子 組 電 腦
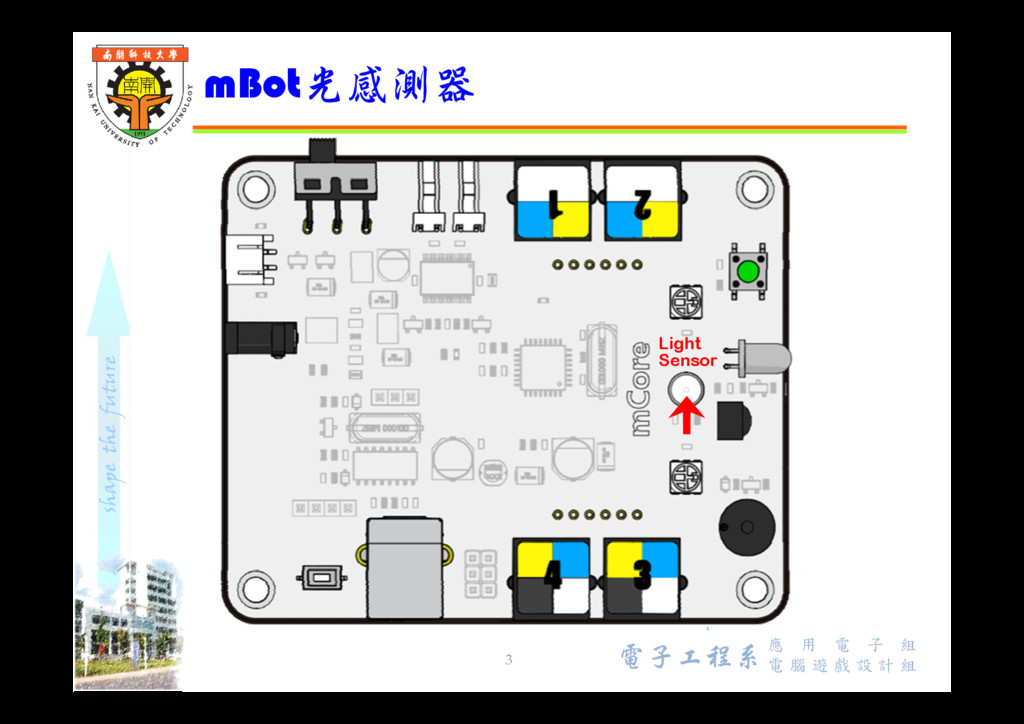
遊 戲 設 計 組 mBot光感測器 3 Light Sensor
shape the future 電子工程系應 用 電 子 組 電 腦
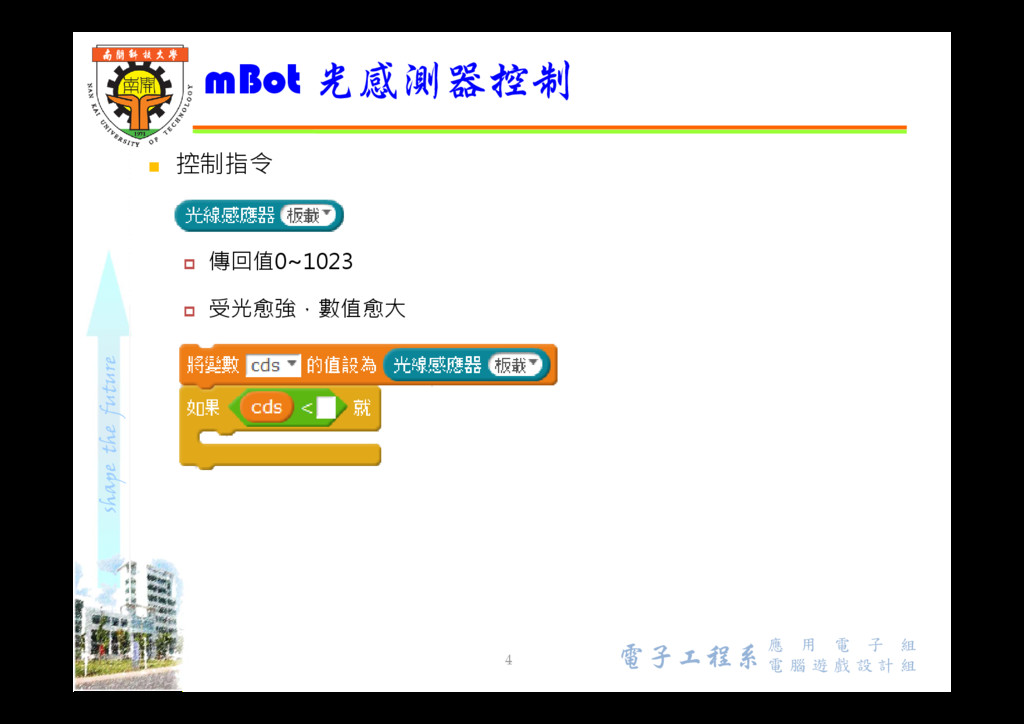
遊 戲 設 計 組 控制指令 傳回值0~1023 受光愈強,數值愈大 mBot 光感測器控制 4
shape the future 電子工程系應 用 電 子 組 電 腦
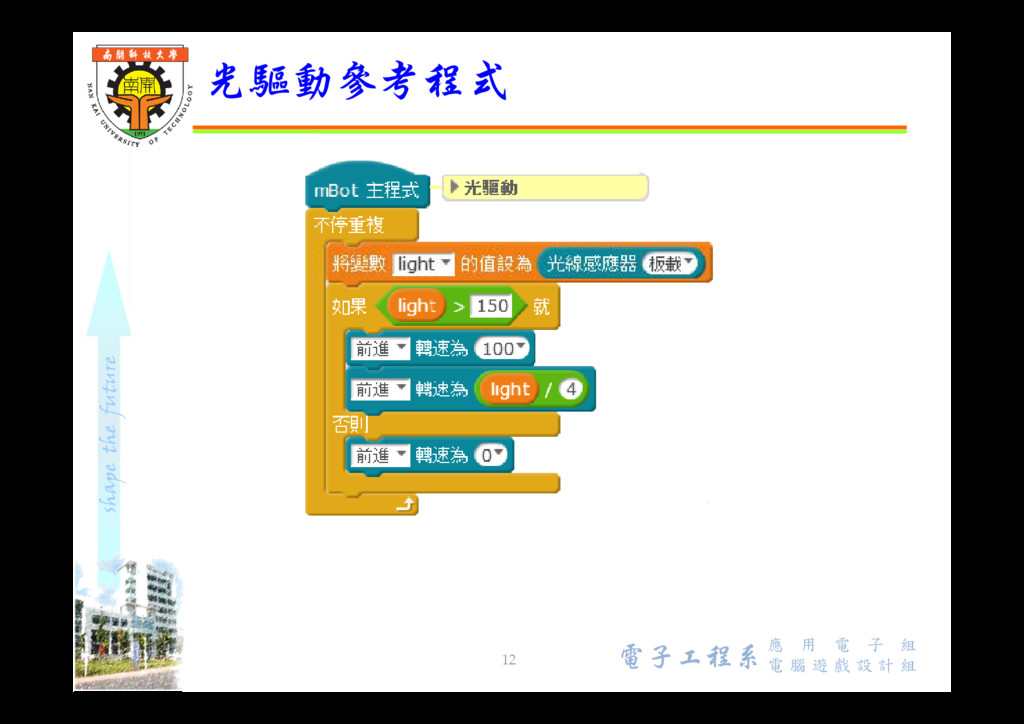
遊 戲 設 計 組 功能要求 光感測器讀值大於150時,,mBot開始前進 mBot受光愈強,mBot速度愈快 光驅動練習 5
shape the future 電子工程系應 用 電 子 組 電 腦
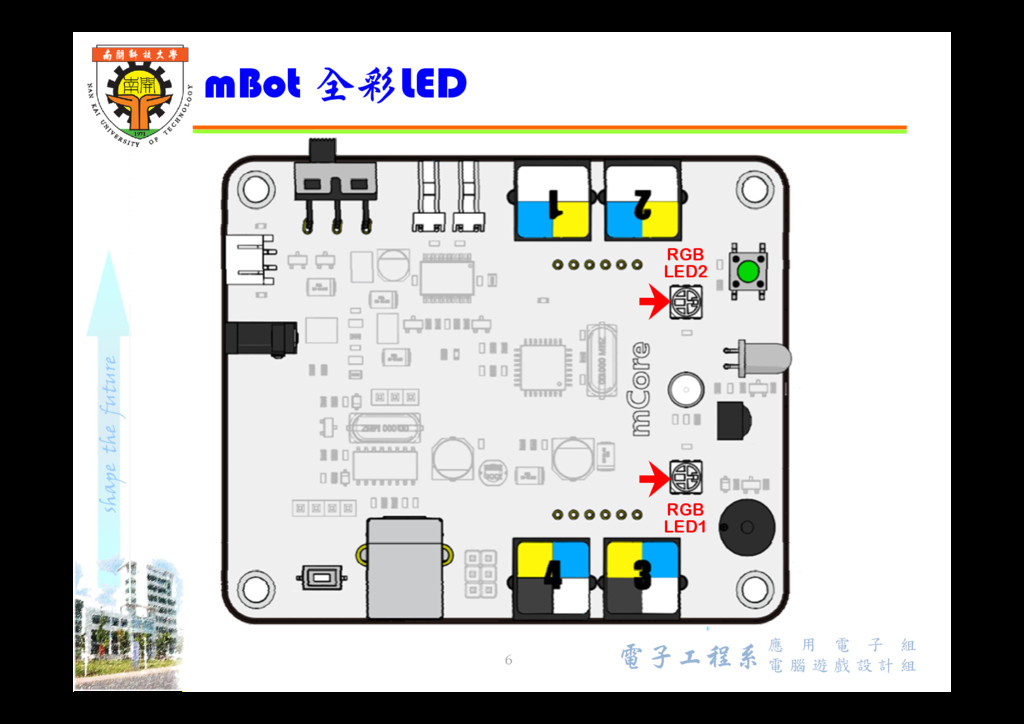
遊 戲 設 計 組 mBot 全彩LED 6 RGB LED2 RGB LED1
shape the future 電子工程系應 用 電 子 組 電 腦
遊 戲 設 計 組 發光二極體 (Light-emitting diode,LED) 是⼀種能發光的半導體電 子元件 單色 LED 紅外線、紅、橙、黃、綠、藍、紫、紫外線 LED原理 1/2 7
shape the future 電子工程系應 用 電 子 組 電 腦
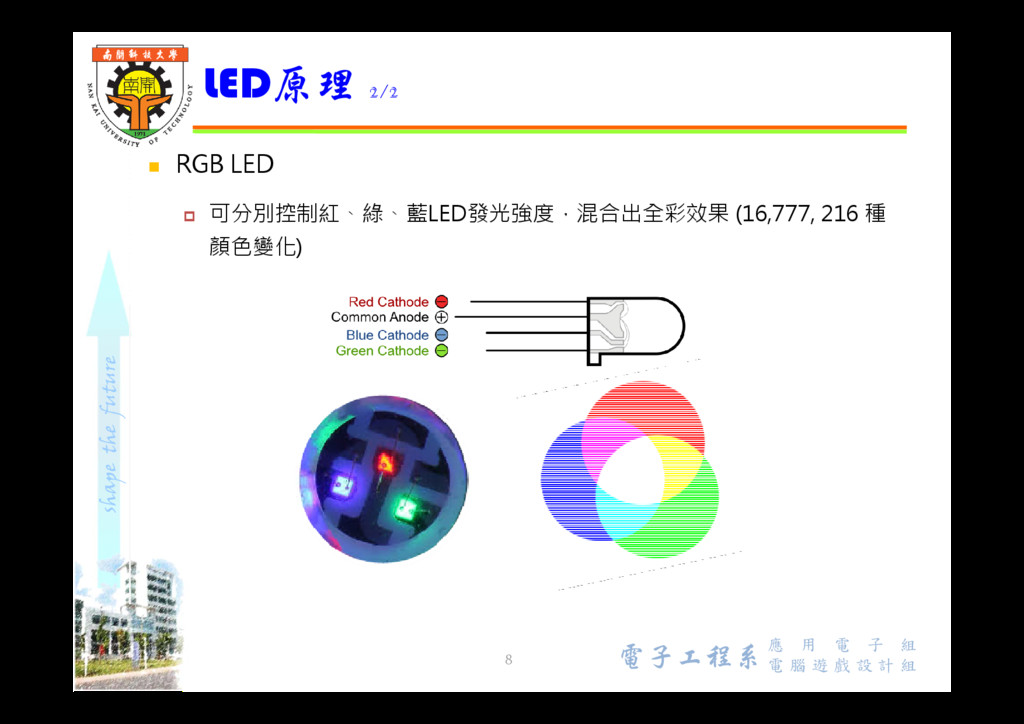
遊 戲 設 計 組 RGB LED 可分別控制紅、綠、藍LED發光強度,混合出全彩效果 (16,777, 216 種 顏色變化) LED原理 2/2 8
shape the future 電子工程系應 用 電 子 組 電 腦
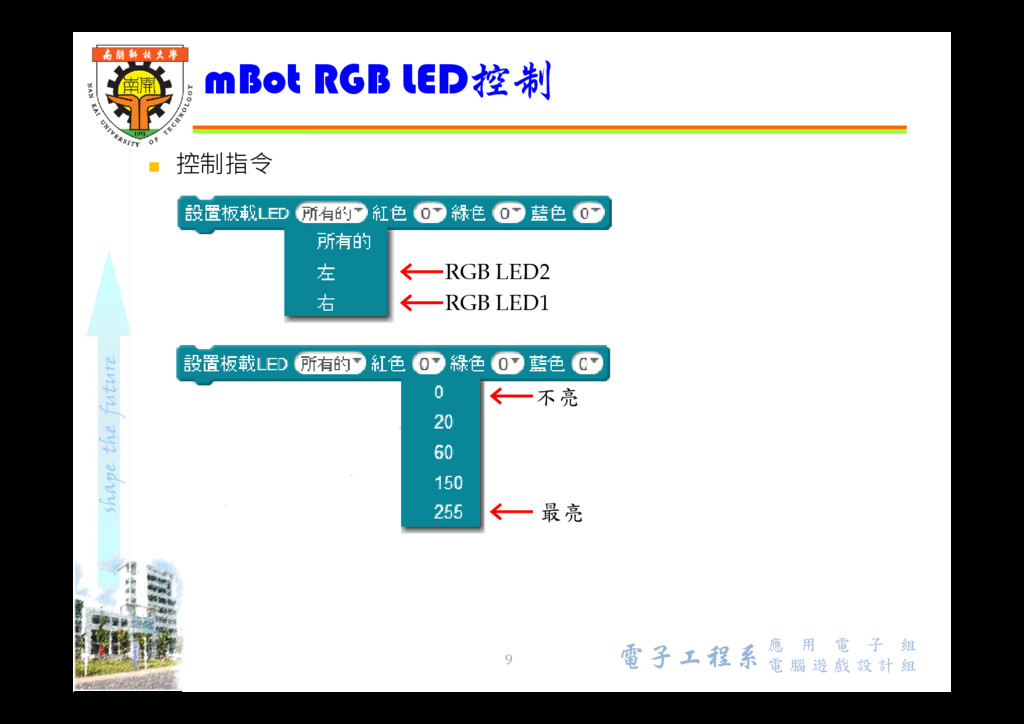
遊 戲 設 計 組 控制指令 mBot RGB LED控制 9 最亮 不亮 RGB LED2 RGB LED1
shape the future 電子工程系應 用 電 子 組 電 腦
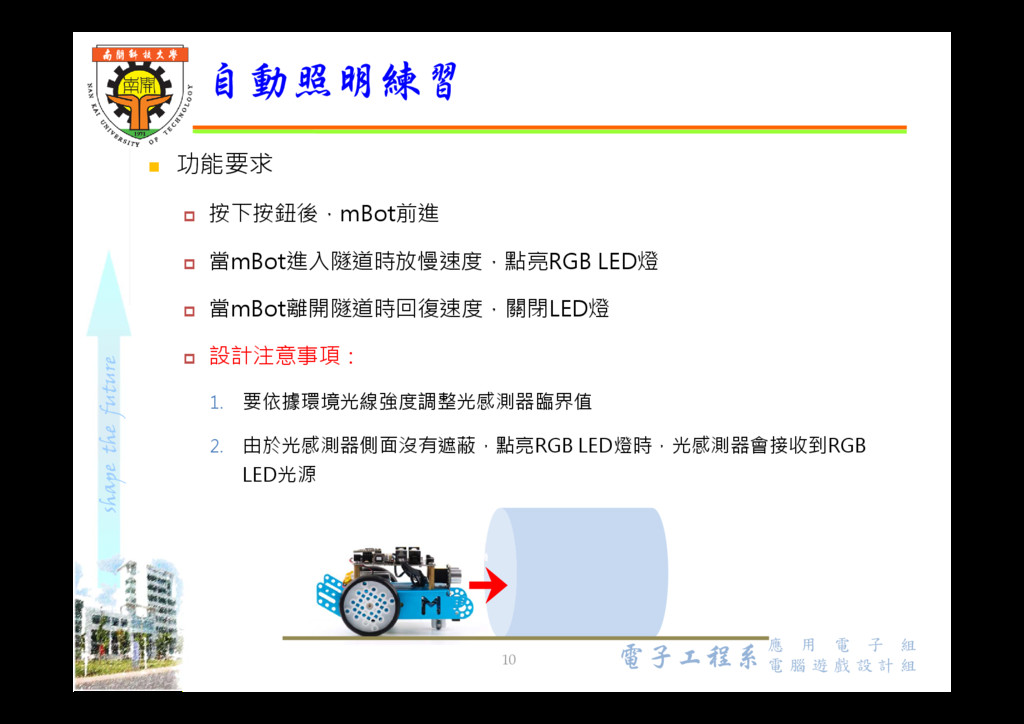
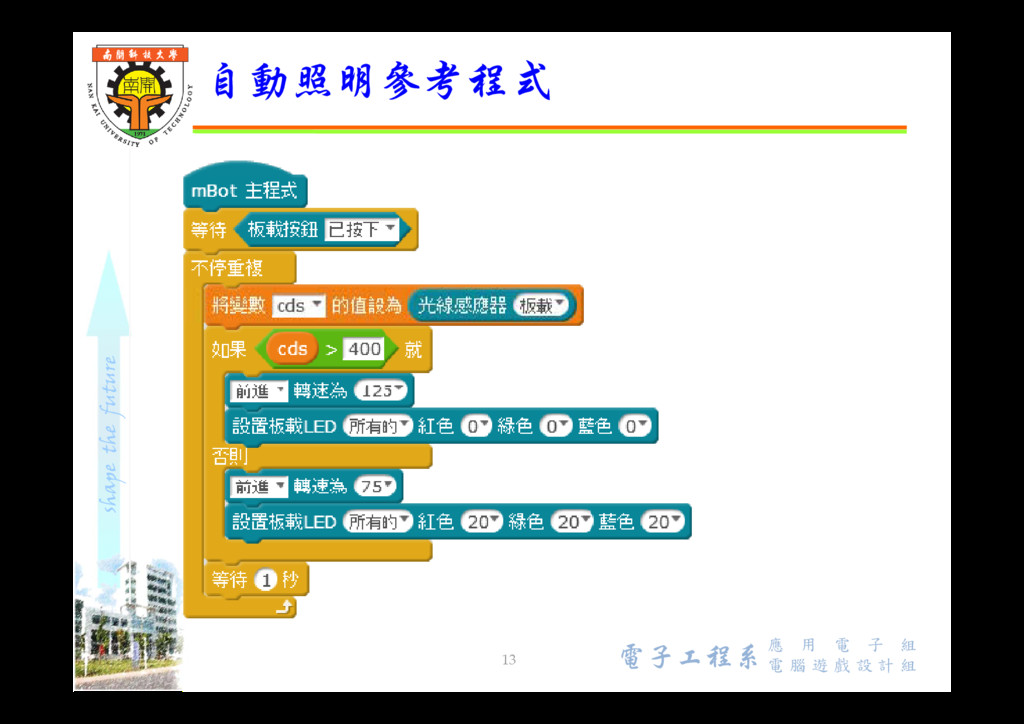
遊 戲 設 計 組 功能要求 按下按鈕後,mBot前進 當mBot進入隧道時放慢速度,點亮RGB LED燈 當mBot離開隧道時回復速度,關閉LED燈 設計注意事項: 1. 要依據環境光線強度調整光感測器臨界值 2. 由於光感測器側面沒有遮蔽,點亮RGB LED燈時,光感測器會接收到RGB LED光源 自動照明練習 10
shape the future 電子工程系應 用 電 子 組 電 腦
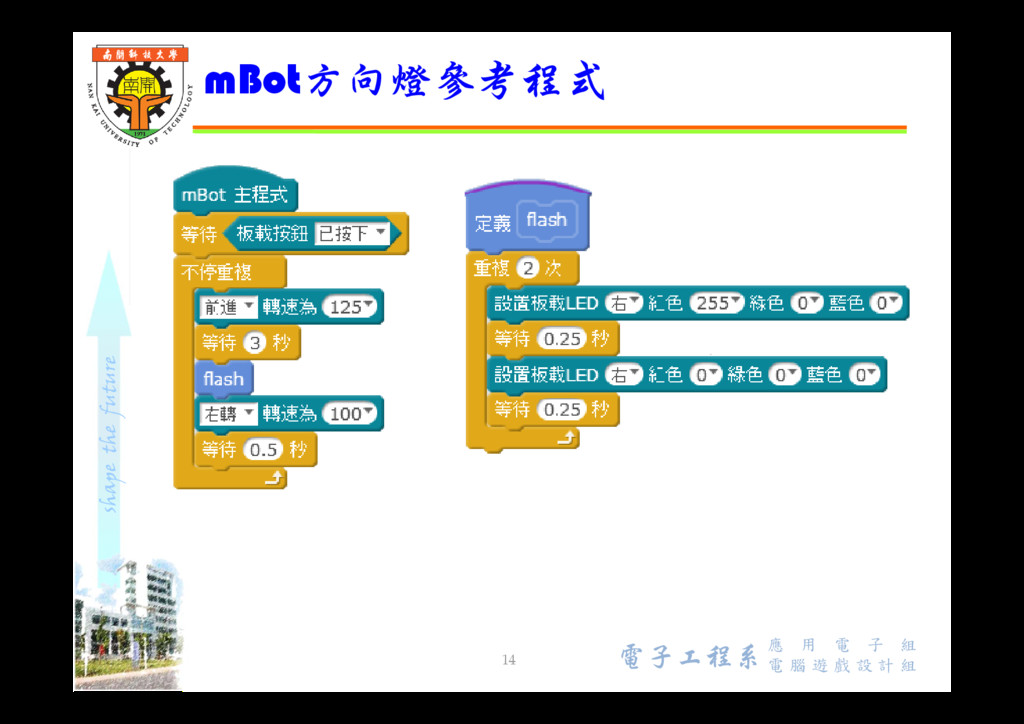
遊 戲 設 計 組 功能要求 按下按鈕後,mBot前進 每4秒讓mBot右轉 右轉前1秒開始閃爍右側LED方向燈,每0.25秒紅色亮、滅交錯 mBot方向燈練習 11
shape the future 電子工程系應 用 電 子 組 電 腦
遊 戲 設 計 組 光驅動參考程式 12
shape the future 電子工程系應 用 電 子 組 電 腦
遊 戲 設 計 組 自動照明參考程式 13
shape the future 電子工程系應 用 電 子 組 電 腦
遊 戲 設 計 組 mBot方向燈參考程式 14
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}