ROSCon JP 2022
2022/10/19
https://roscon.jp/
now and next about mROS 2
高瀬英希、細合晋太郎、檜原陽一郎、田中晴亮 (東京大学)、森田正二 (イーソル株式会社)
概要:
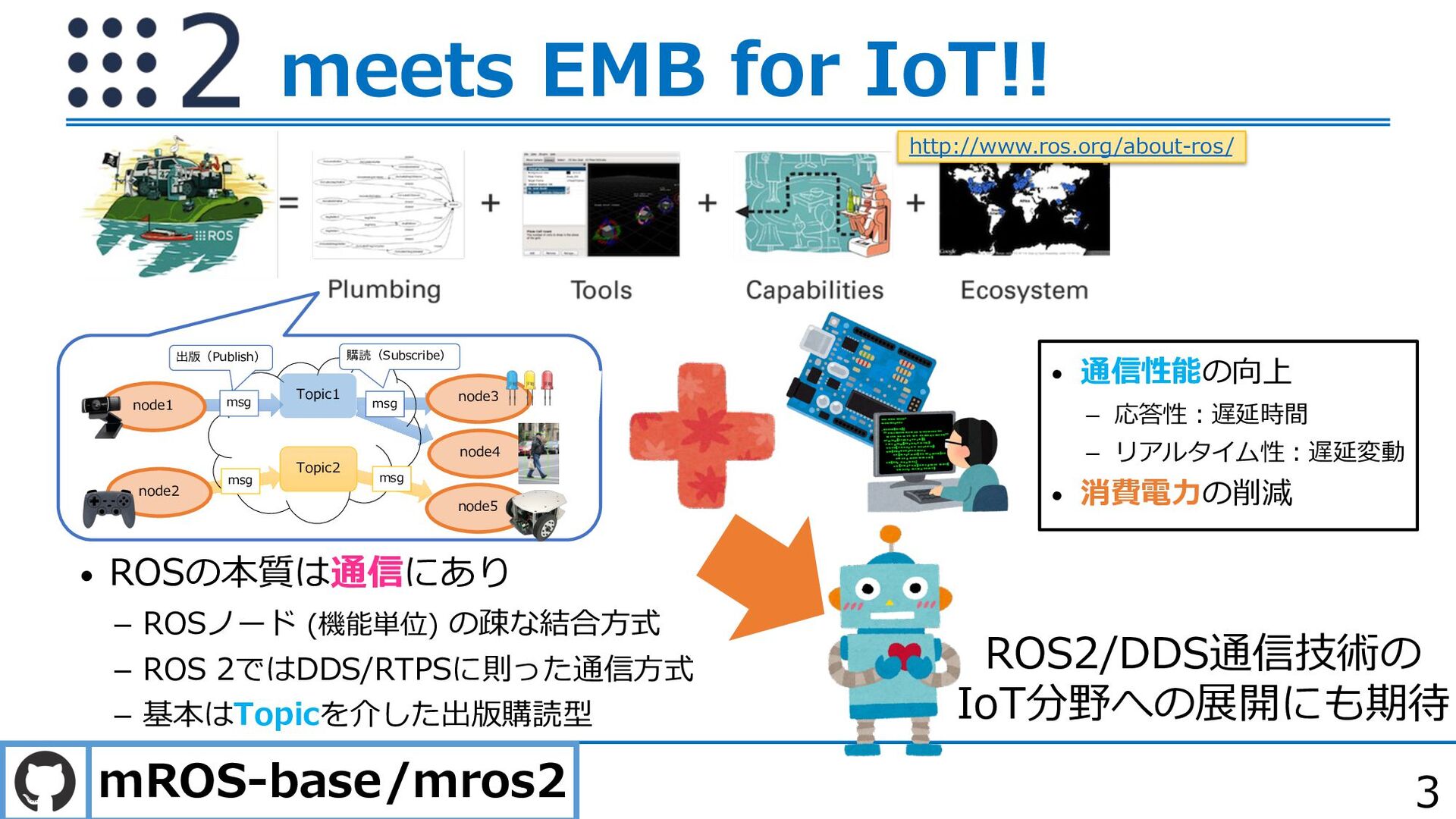
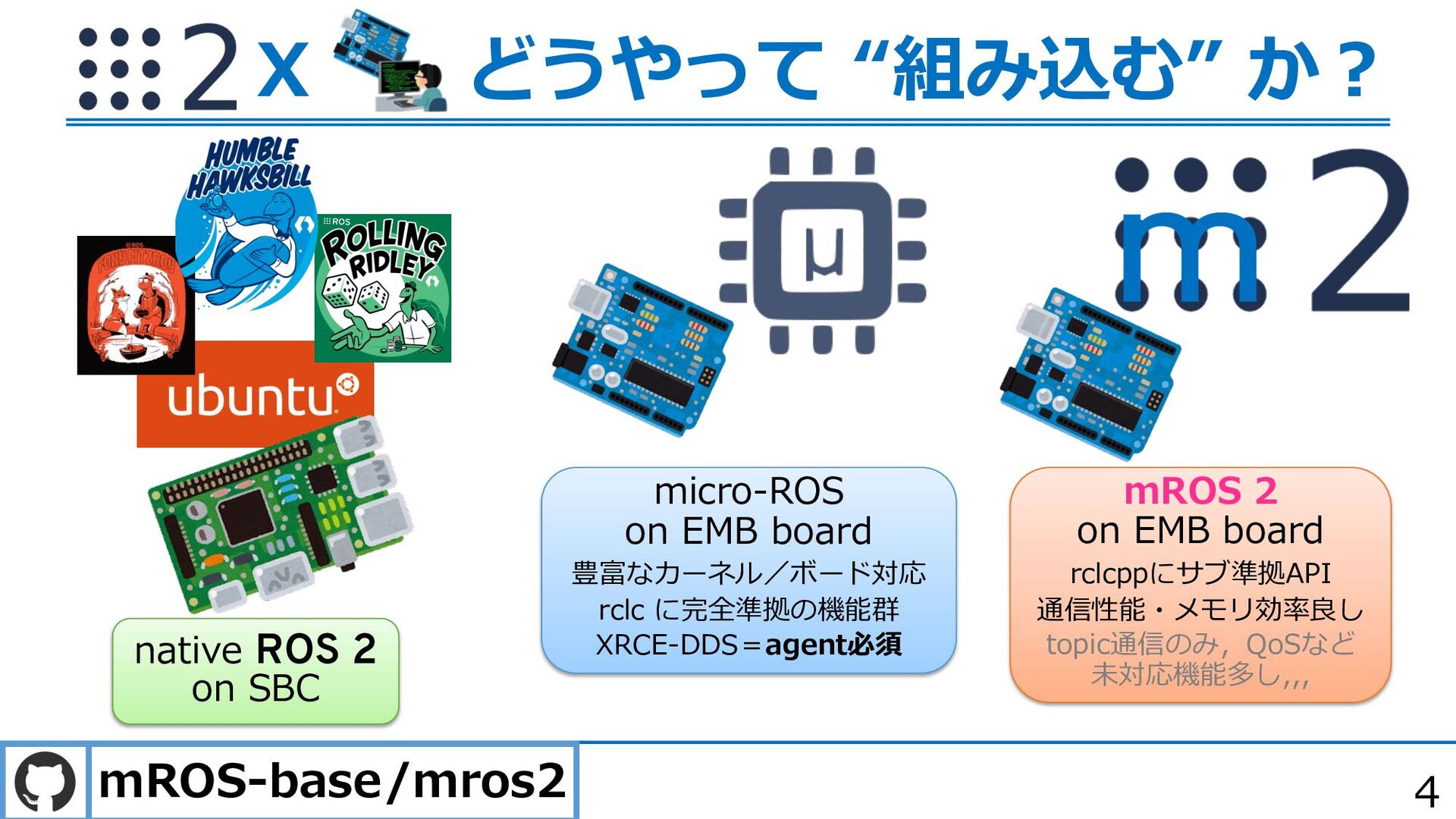
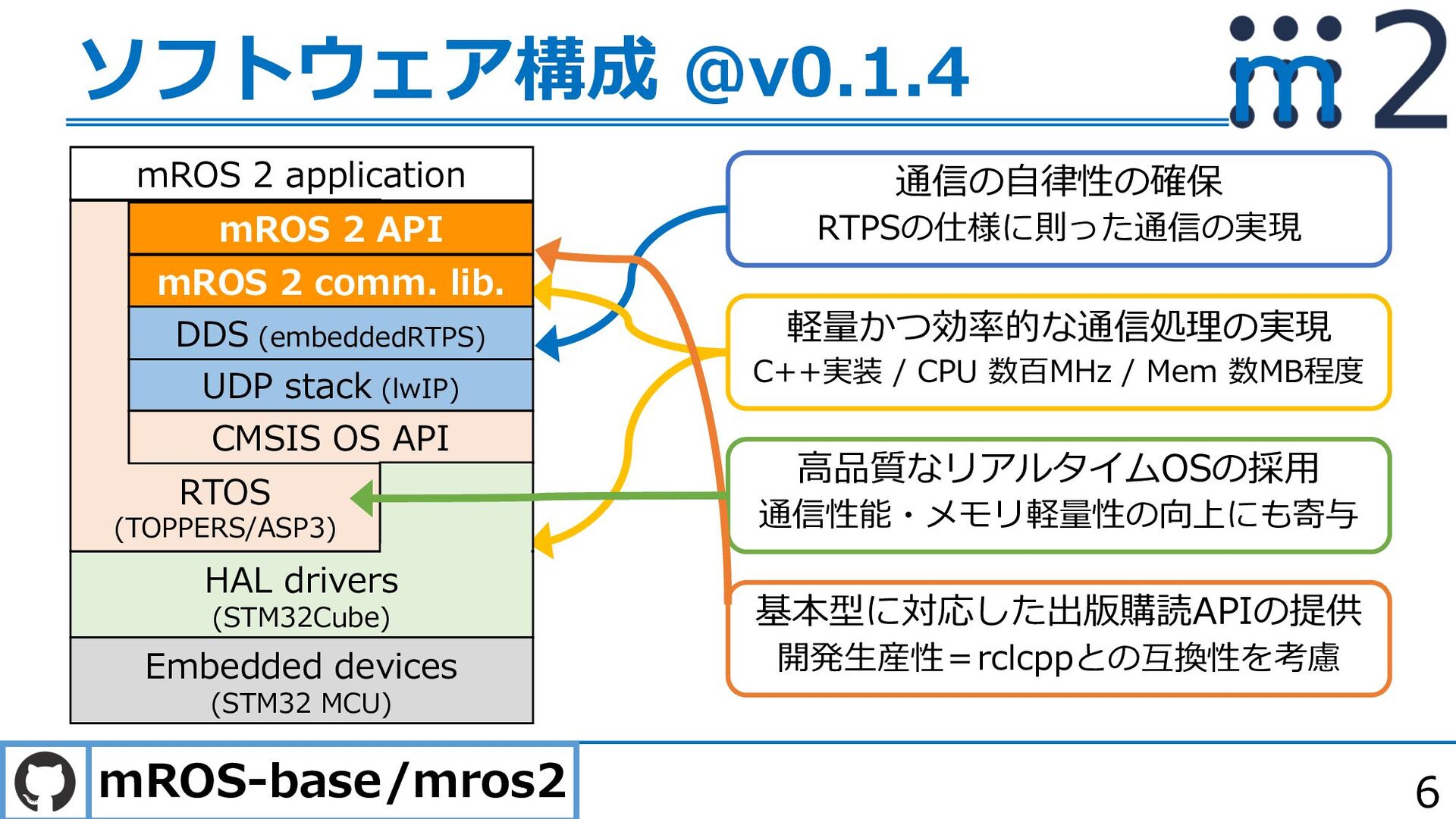
mROS 2は組込みデバイス向けの軽量実行環境である。ホストデバイス上のROS 2ノードに対して、RTPSプロトコルに則った自律的な通信をagentノードの仕組みなしに実現できる。ROSCon JP 2021およびROS World 2021のLTでお披露目した本環境について、最新の開発状況やアップデートを紹介する。そして、IoT分野にもたらされるROS 2技術の今後の展開について議論したい。
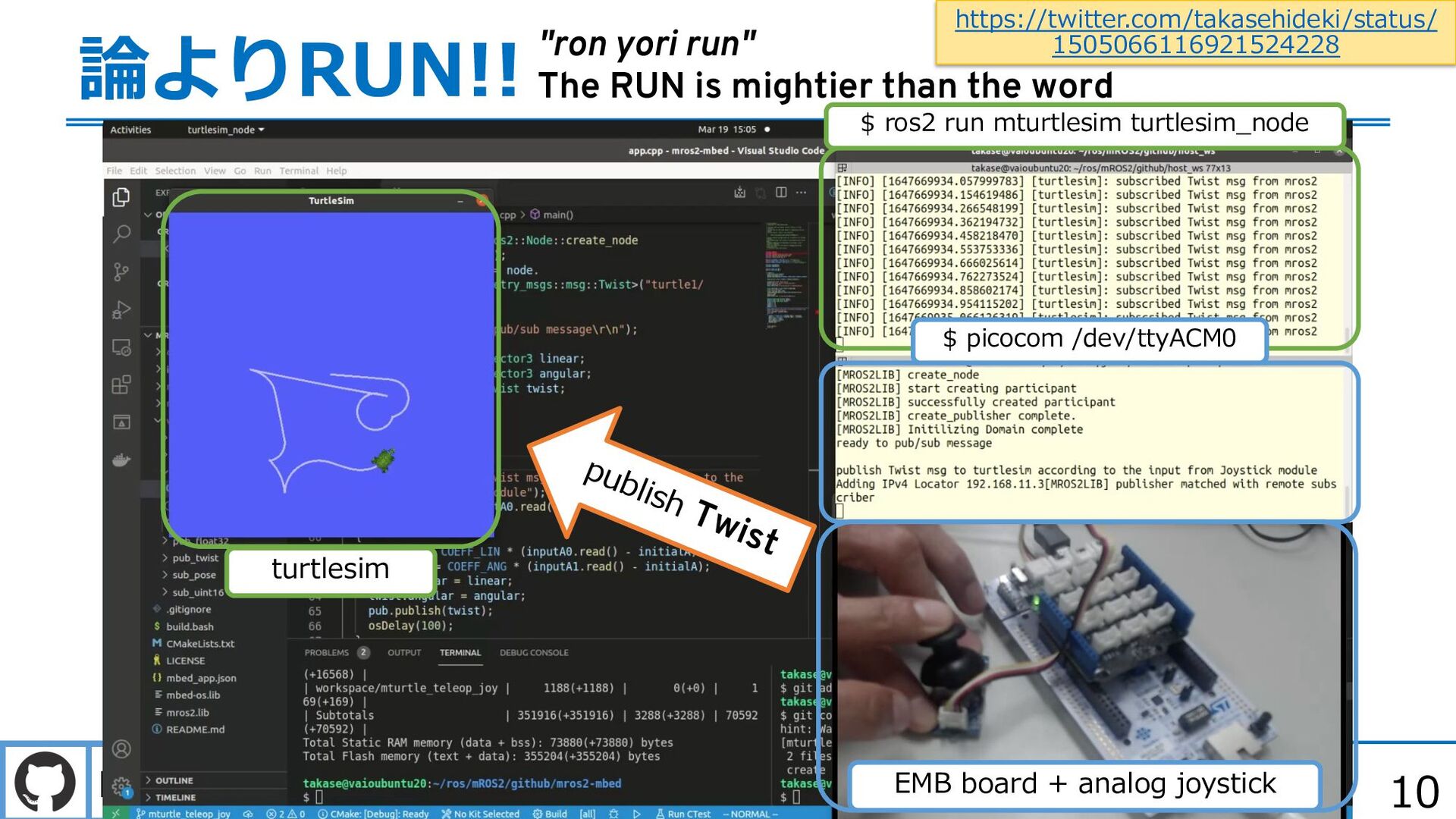
論よりRUN:
Part1 (p.10) https://twitter.com/takasehideki/status/1505066116921524228
Part2 (p.14) https://twitter.com/takasehideki/status/1584486712780390401
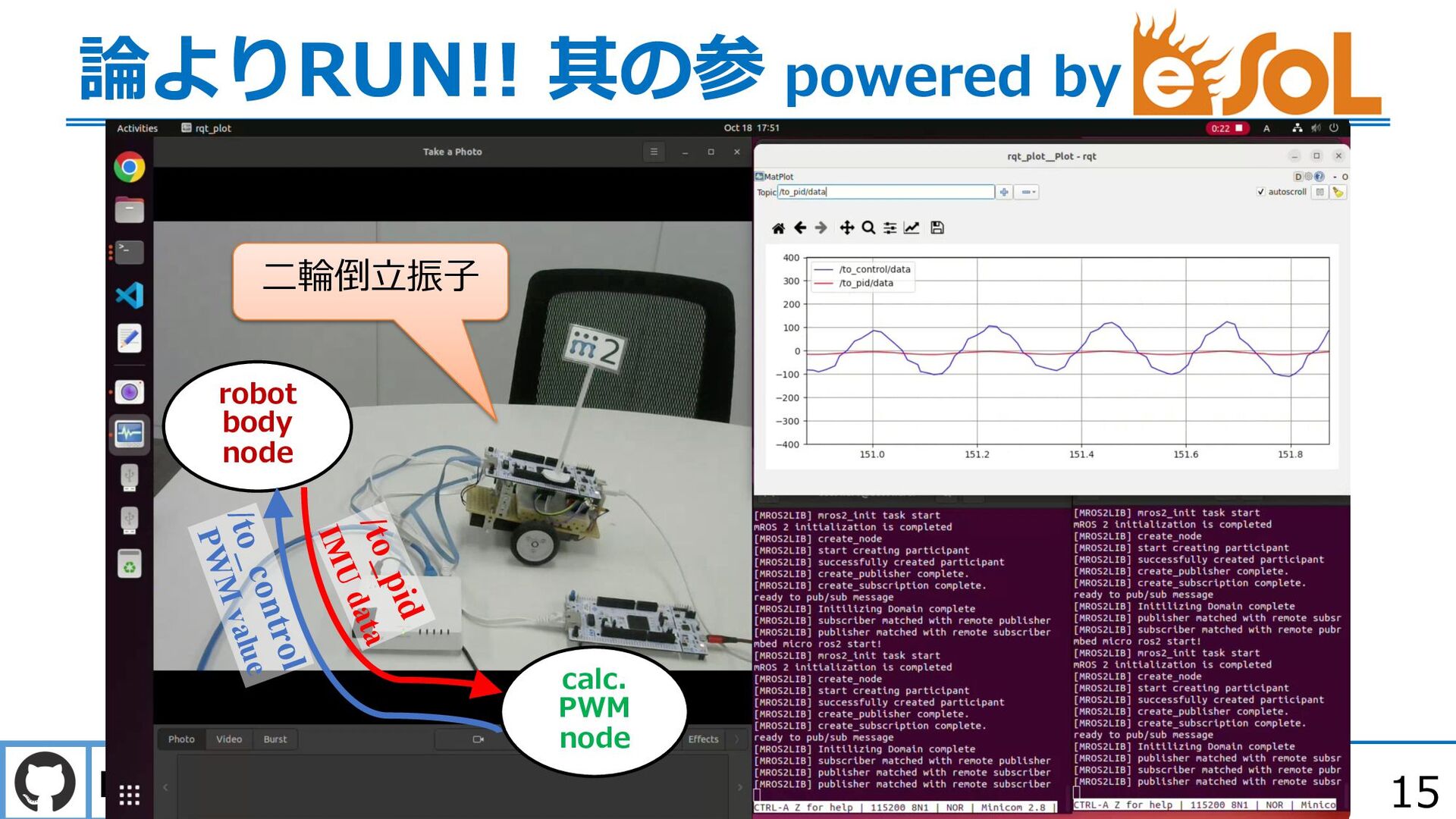
Part3 (p.15) https://twitter.com/takasehideki/status/1584488359808102402
GitHub link (STAR please!!):
https://github.com/mROS-base/mros2
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![7 補⾜︓embeddedRTPS [A. Kampmann+ ITSC'2019] • C++実装による組込み向けのRTPSスタック UDP/IP には lwIP](https://files.speakerdeck.com/presentations/4a54b01f565947309254c0f35975aee1/slide_6.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}