Azure Kinect SDK is installed C:¥Program Files¥Azure Kinect SDK v1.2.0¥sdk¥windows-desktop¥amd64¥release¥bin ②Drag and drop depthengine_2_0.dll into Plugins of your project
mesh; //Used for Drawing Shape Vector3[] vertices; //Position of each point. Color32[] colors; //Color of each point. int[] indices; //Index list of drawing point void Start() { InitKinect(); InitMesh(); //Initialization of mesh } void InitMesh() { //See the next page. }
new Mesh(); //Enable drawing more than 65535 points mesh.indexFormat = UnityEngine.Rendering.IndexFormat.UInt32; //allocation of memory for treating information to //draw point cloud. vertices = new Vector3[num]; colors = new Color32[num]; indices = new int[num]; //See next page }
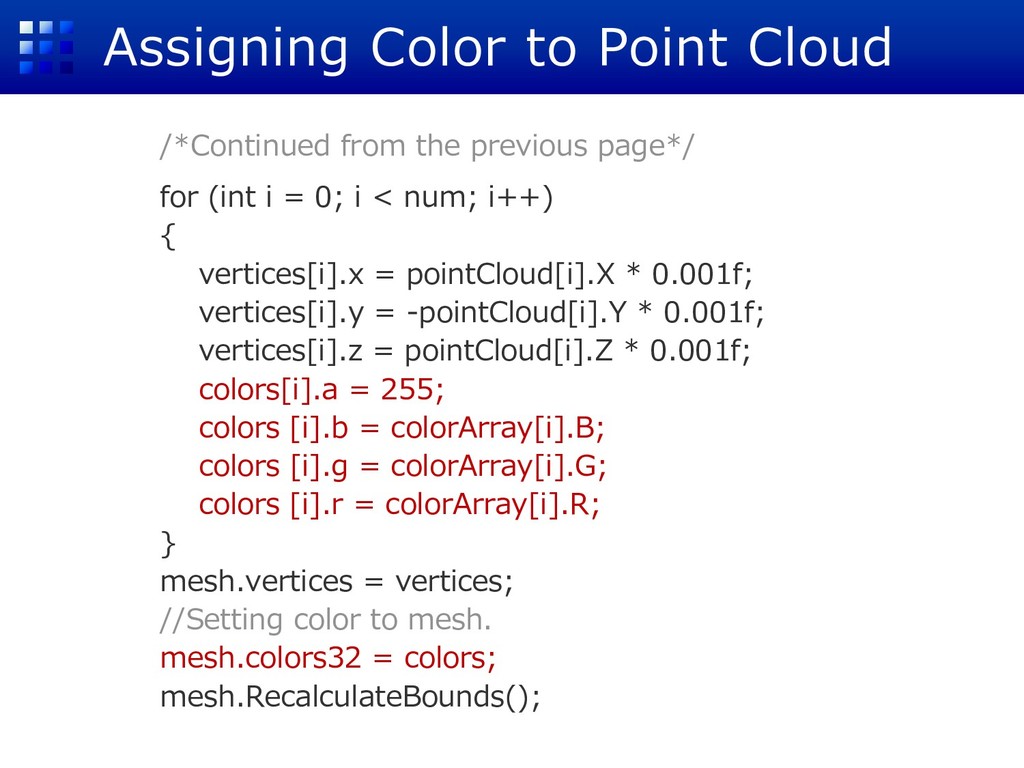
index = 0; //index of vertex array. for (int y = 0; y < height; y++) { for (int x = 0; x < width; x++) { vertices[index].x = x ; vertices[index].y = y ; vertices[index].z = 2; colors[index].r = 0; colors [index].g = 0; colors [index].b = 255; colors [index].a = 255; indices[index] = index; index++; } } Temporally setting the coordinates of each vertex Temporally setting the color of each vertex Setting drawing list.
0; for (int y = 0; y < height; y++) { for (int x = 0; x < width; x++) { /*Omitted*/ } } //Assignment vertices and colors to mesh. mesh.vertices = vertices; mesh.colors32 = colors; //Setting drawing list and mesh topology. mesh.SetIndices(indices, MeshTopology.Points, 0); //Assingnment of mesh to MeshFilter of the gameObject. gameObject.GetComponent<MeshFilter>().mesh = mesh;
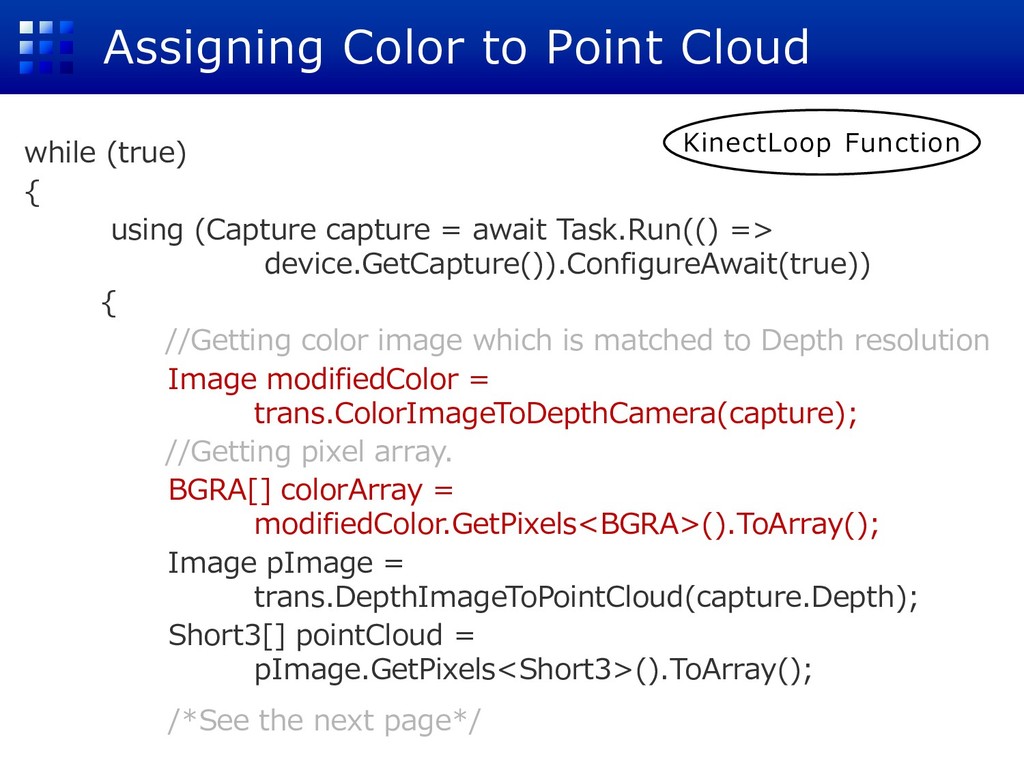
of Kinect using (Capture capture = await Task.Run(() => device.GetCapture()).ConfigureAwait(true)) { //Getting Depth image with capture.Depth //And transform it into xyz by DeptuImageToPointCloud Image pImage = trans.DepthImageToPointCloud(capture.Depth); //Getting vertices data. Short3[] pointCloud = pImage.GetPixels<Short3>().ToArray(); /*See the next page*/ } }
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Getting DataStream from Kinect Int[] indices; Transformation trans; //Coordinate tranlation](https://files.speakerdeck.com/presentations/fd7e5b7b151e4d12bf62217b1598ab3b/slide_47.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}