LP双対性(duality) u 4. LPが多項式時間で解けることの証明(Khachiyan’s Theorem) u 5. IP導入 u 6. TDI性(total dual integrality)と完全単模性(totally unimodularity) u 7. 切除平面法(cutting plane method) 3
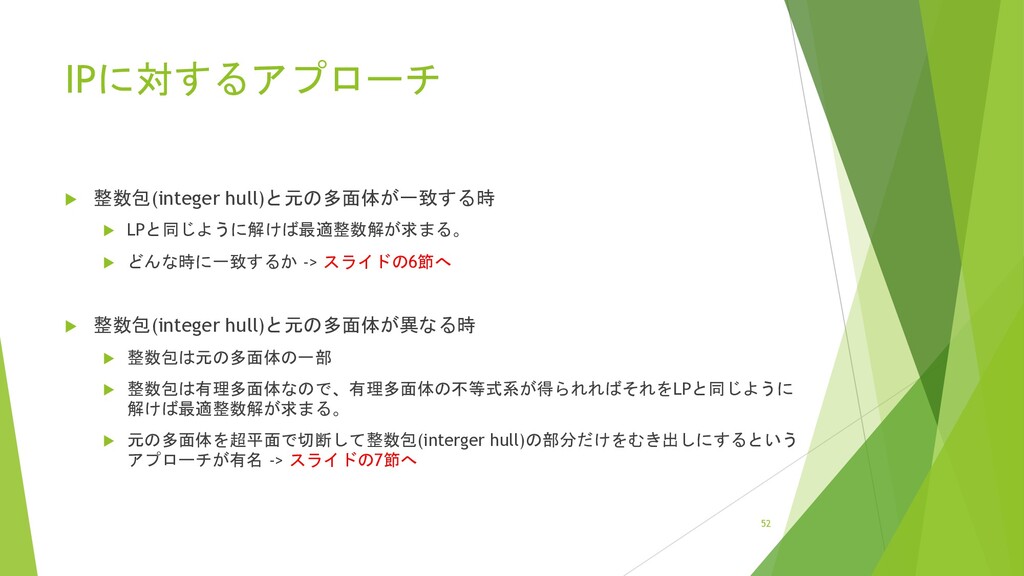
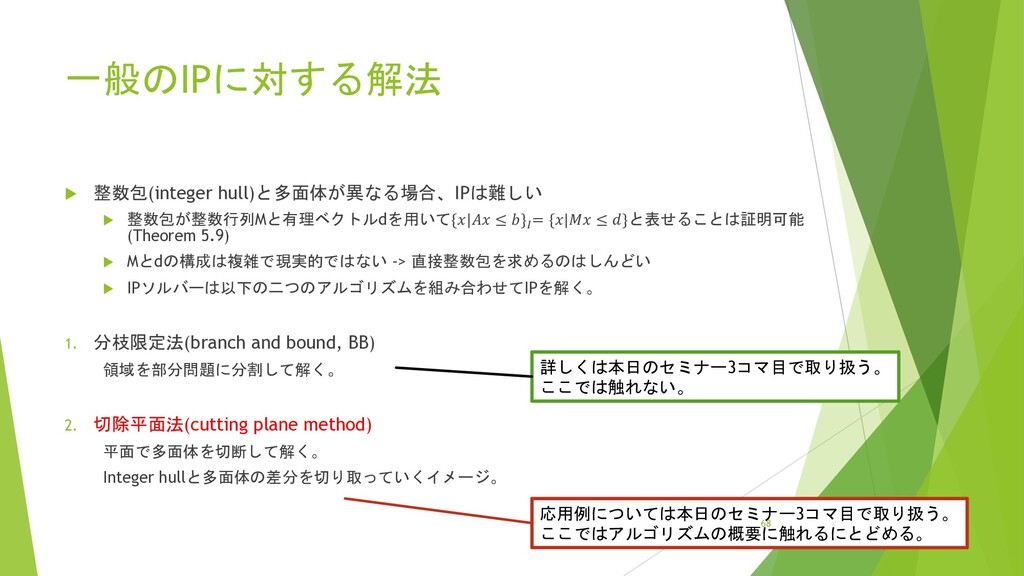
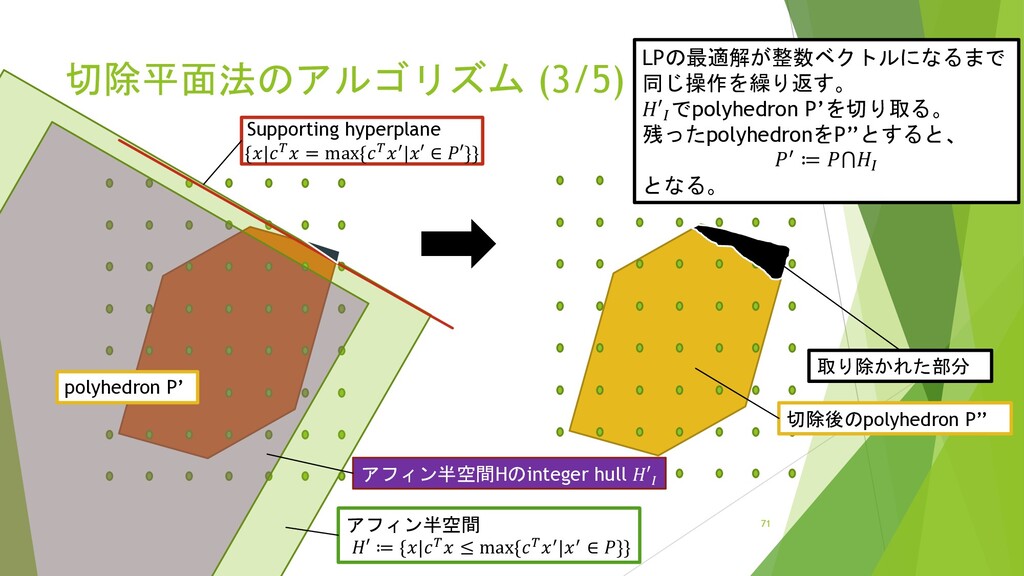
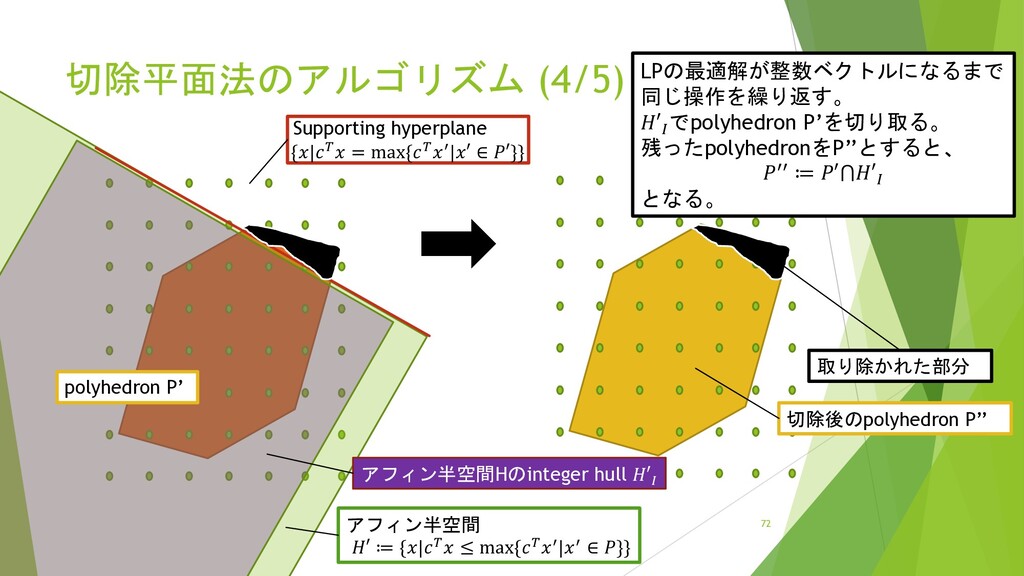
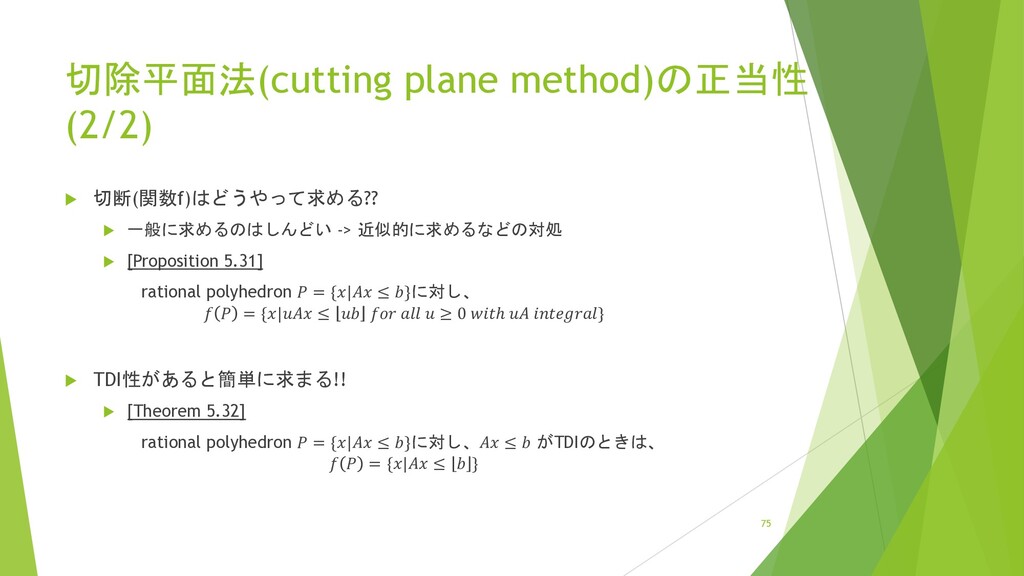
u 整数包(integer hull)と元の多面体が異なる時 u 整数包は元の多面体の一部 u 整数包は有理多面体なので、有理多面体の不等式系が得られればそれをLPと同じように 解けば最適整数解が求まる。 u 元の多面体を超平面で切断して整数包(interger hull)の部分だけをむき出しにするという アプローチが有名 -> スライドの7節へ 52
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![実行可能かどうかの判定法 LPが実行可能でない(infeasible)ことと双対性の関係を知りたい。 以下の定理(および言い換えた補題)が重要 [Farkas’s Lemma] 1. ≤ ≠ ∅ ⟺](https://files.speakerdeck.com/presentations/f7305fce936f47e89cfb7e5e242d75fe/slide_35.jpg){kind=link}
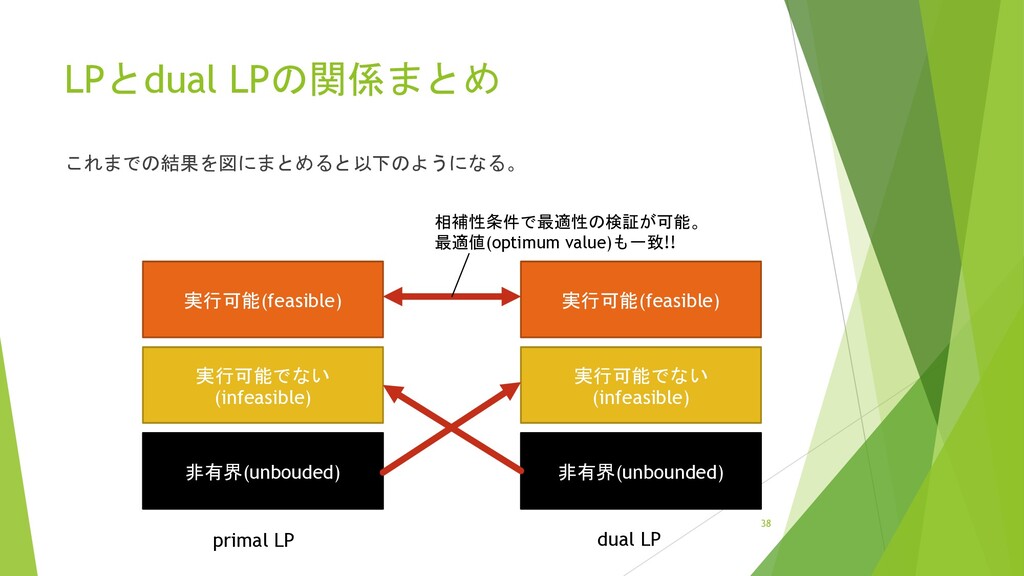
![LPとdual LPの関係性 [Theorem 3.27] 1. LPがunbouded => dual LPがinfeasible 2.](https://files.speakerdeck.com/presentations/f7305fce936f47e89cfb7e5e242d75fe/slide_36.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![多面体がintegralであることの同値条件 (1/6) [Theorem 5.18] 多面体Pがintegralであることと以下が全て同値 (a) Pの全ての面(face)が整数ベクトルを含む。 (b) Pの全ての極小な面(minimal)が整数ベクトルを含む。 (c)](https://files.speakerdeck.com/presentations/f7305fce936f47e89cfb7e5e242d75fe/slide_54.jpg){kind=link}
![多面体がintegralであることの同値条件 (2/6) [Theorem 5.18] 多面体Pがintegralであることと以下が全て同値 (a) Pの全ての面(face)が整数ベクトルを含む。 (b) Pの全ての極小な面(minimal)が整数ベクトルを含む。 (c)](https://files.speakerdeck.com/presentations/f7305fce936f47e89cfb7e5e242d75fe/slide_55.jpg){kind=link}
![多面体がintegralであることの同値条件 (3/6) [Theorem 5.18] 多面体Pがintegralであることと以下が全て同値 (a) Pの全ての面(face)が整数ベクトルを含む。 (b) Pの全ての極小な面(minimal face)が整数ベクトルを含む。](https://files.speakerdeck.com/presentations/f7305fce936f47e89cfb7e5e242d75fe/slide_56.jpg){kind=link}
![多面体がintegralであることの同値条件 (4/6) [Theorem 5.18] 多面体Pがintegralであることと以下が全て同値 (a) Pの全ての面(face)が整数ベクトルを含む。 (b) Pの全ての極小な面(minimal)が整数ベクトルを含む。 (c)](https://files.speakerdeck.com/presentations/f7305fce936f47e89cfb7e5e242d75fe/slide_57.jpg){kind=link}
![多面体がintegralであることの同値条件 (5/6) [Theorem 5.18] 多面体Pがintegralであることと以下が全て同値 (a) Pの全ての面(face)が整数ベクトルを含む。 (b) Pの全ての極小な面(minimal)が整数ベクトルを含む。 (c)](https://files.speakerdeck.com/presentations/f7305fce936f47e89cfb7e5e242d75fe/slide_58.jpg){kind=link}
![多面体がintegralであることの同値条件 (6/6) [Theorem 5.18] 多面体Pがintegralであることと以下が全て同値 (a) Pの全ての面(face)が整数ベクトルを含む。 (b) Pの全ての極小な面(minimal)が整数ベクトルを含む。 (c)](https://files.speakerdeck.com/presentations/f7305fce936f47e89cfb7e5e242d75fe/slide_59.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![完全単模(totally unimodular)と解の整数性 (1/2) [Theorem 5.21] が ⟺ {| ≤ ,](https://files.speakerdeck.com/presentations/f7305fce936f47e89cfb7e5e242d75fe/slide_63.jpg){kind=link}
![完全単模(totally unimodular)と解の整数性 (2/2) [Theorem 5.21] が ⟺ {| ≤ ,](https://files.speakerdeck.com/presentations/f7305fce936f47e89cfb7e5e242d75fe/slide_64.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}