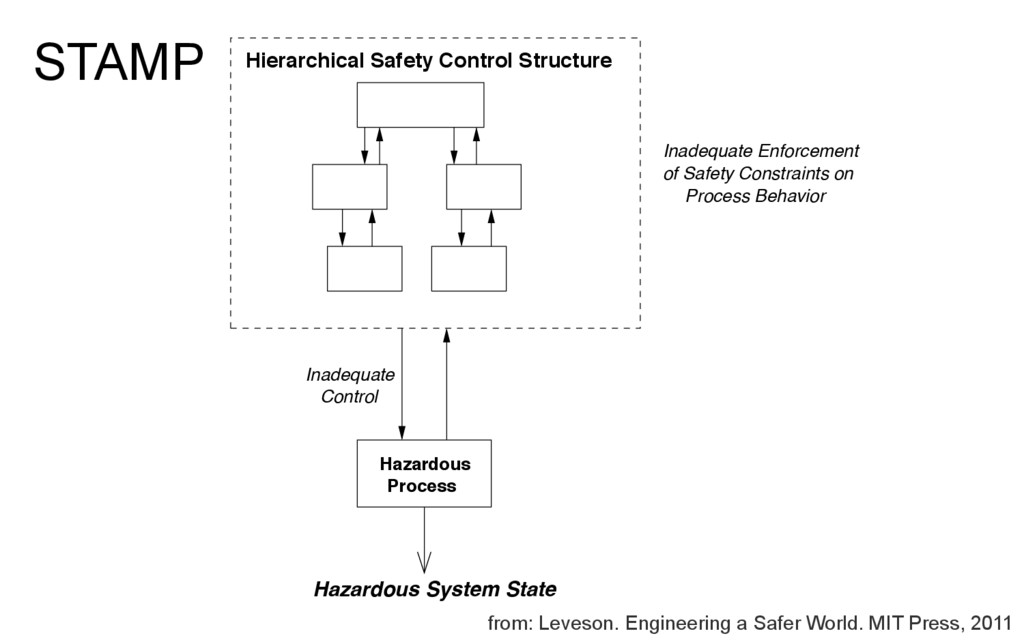
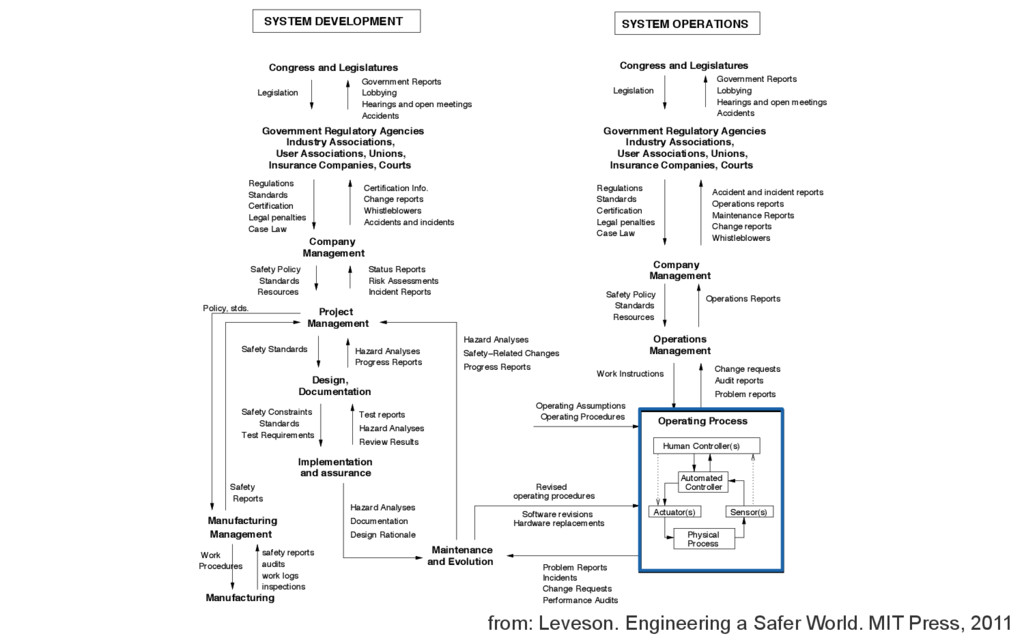
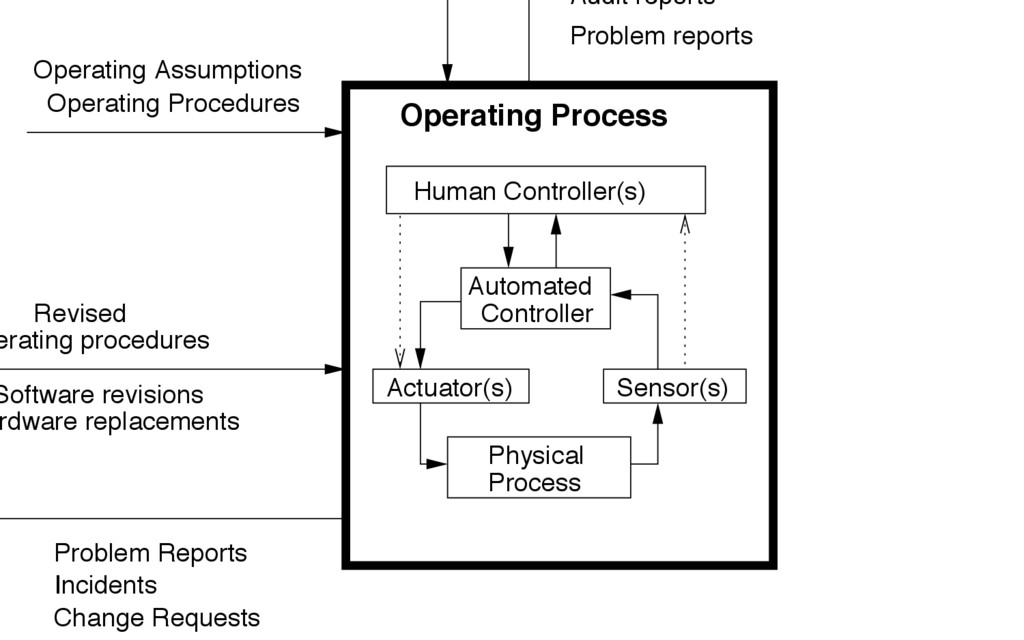
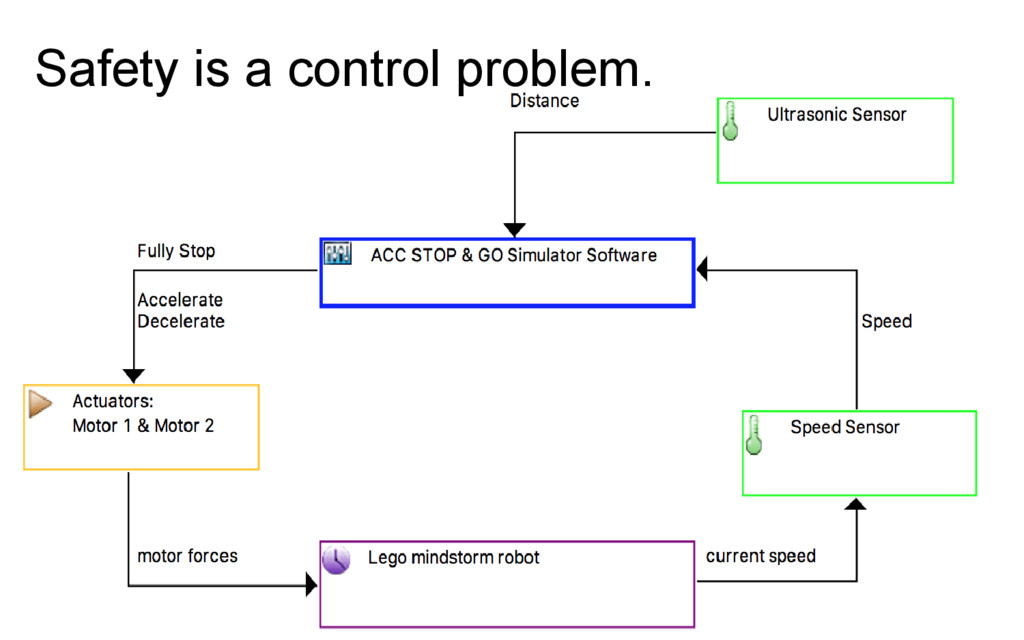
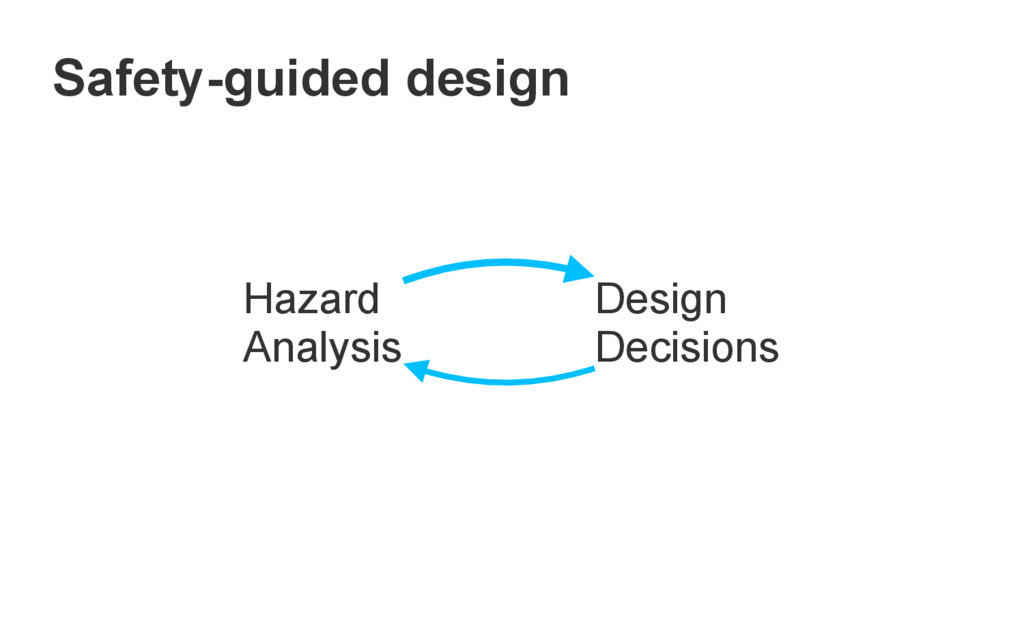
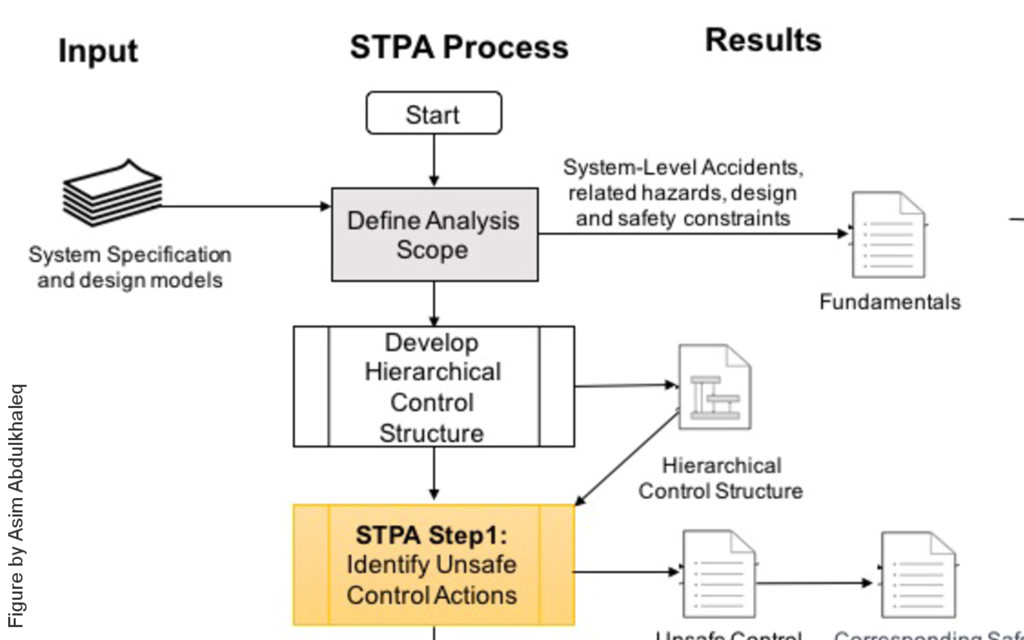
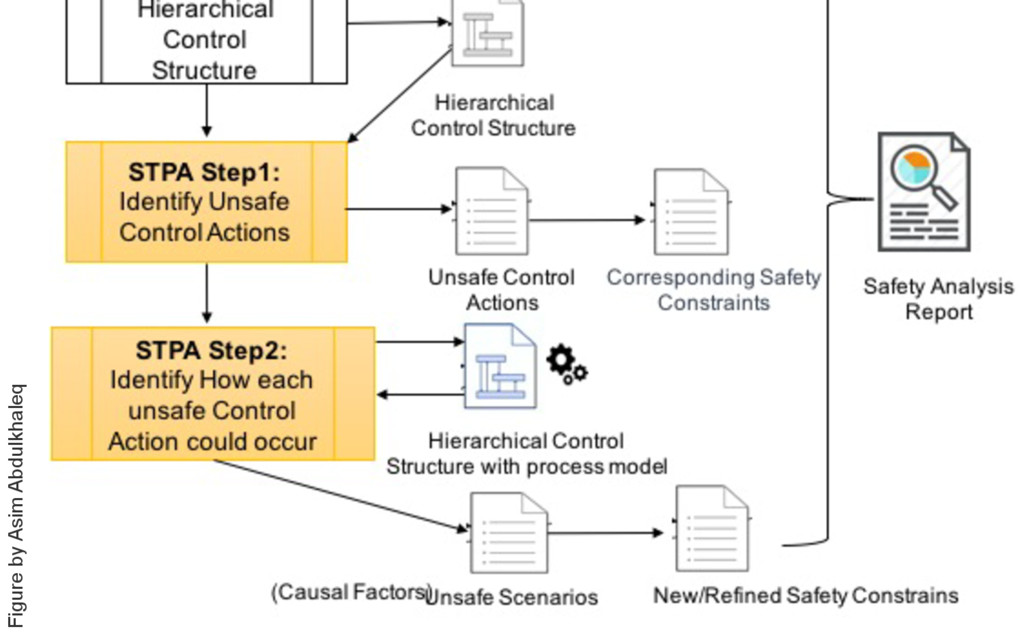
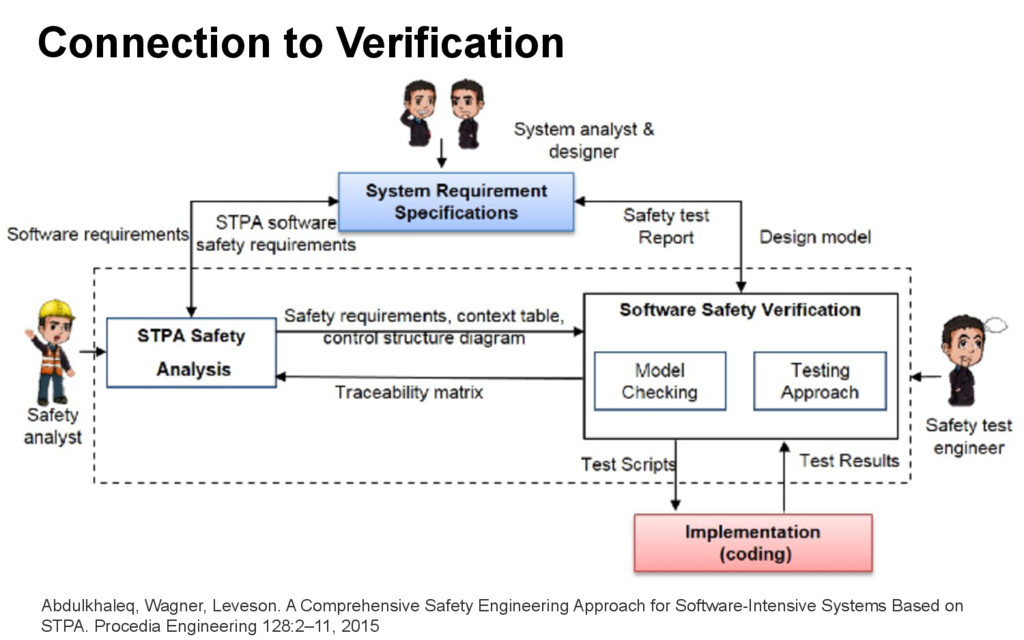
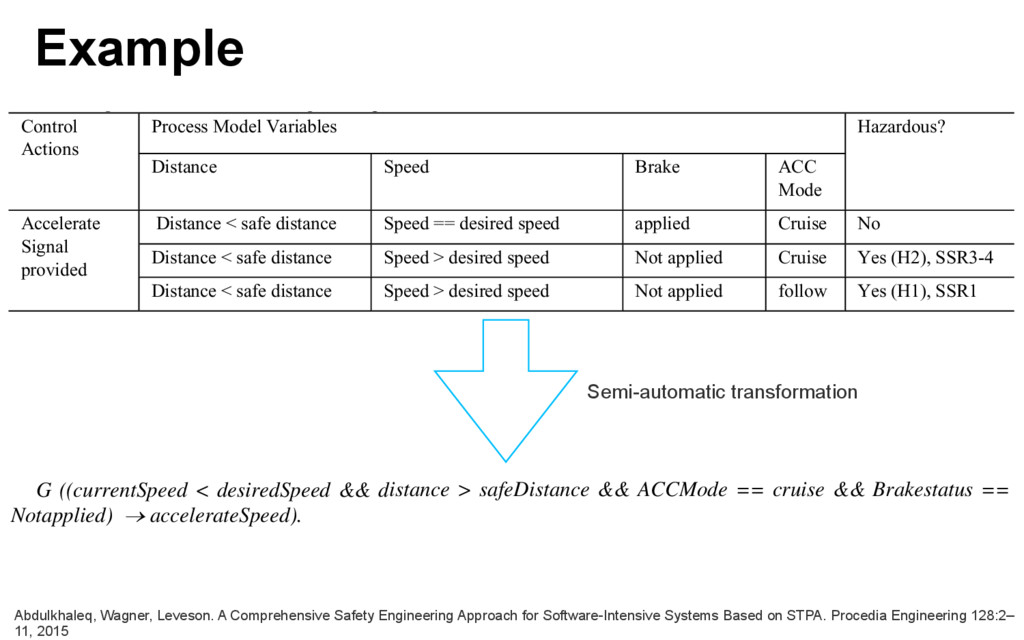
The slides to my talk at the DGLR Workshop "Software Safety" given on 2016-10-05 in Garching (at TU Munich). It describes the STAMP/STPA approach in general and our extension to connect it to tests and model checking.
http://www.dglr.de/index.php?id=3272
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Prof. Dr. Stefan Wagner e-mail [email protected] phone +49 (0) 711](https://files.speakerdeck.com/presentations/60839e2bcfcf497caae226fc289dc46c/slide_34.jpg){kind=link}
{kind=link}