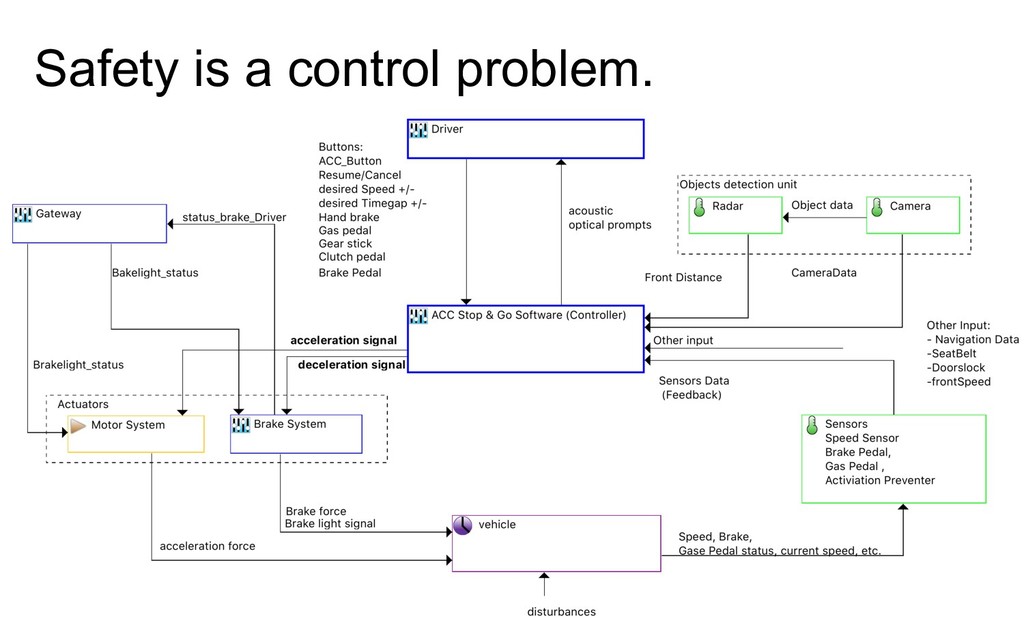
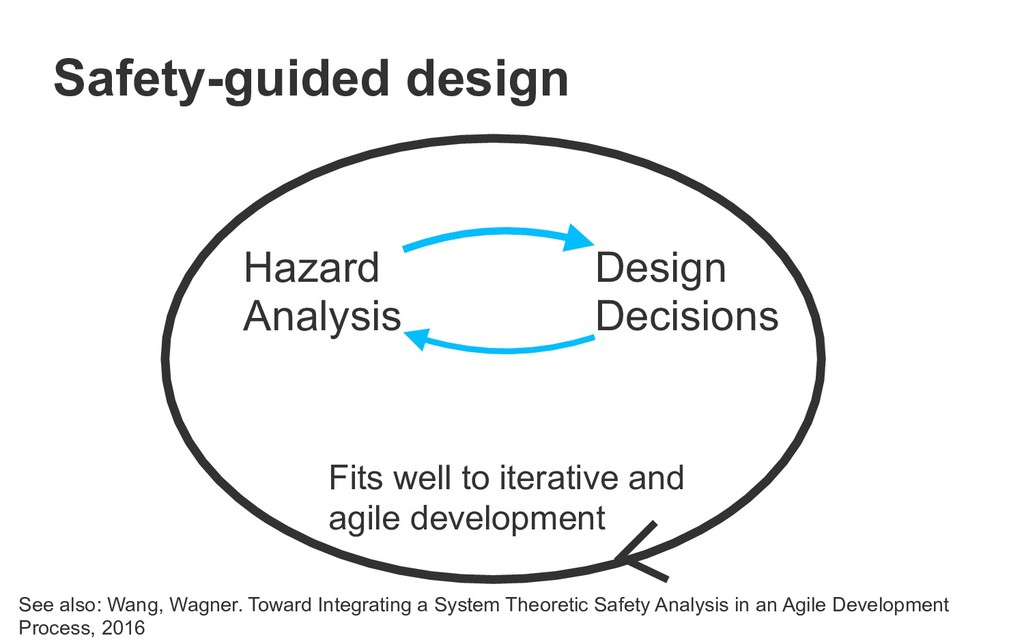
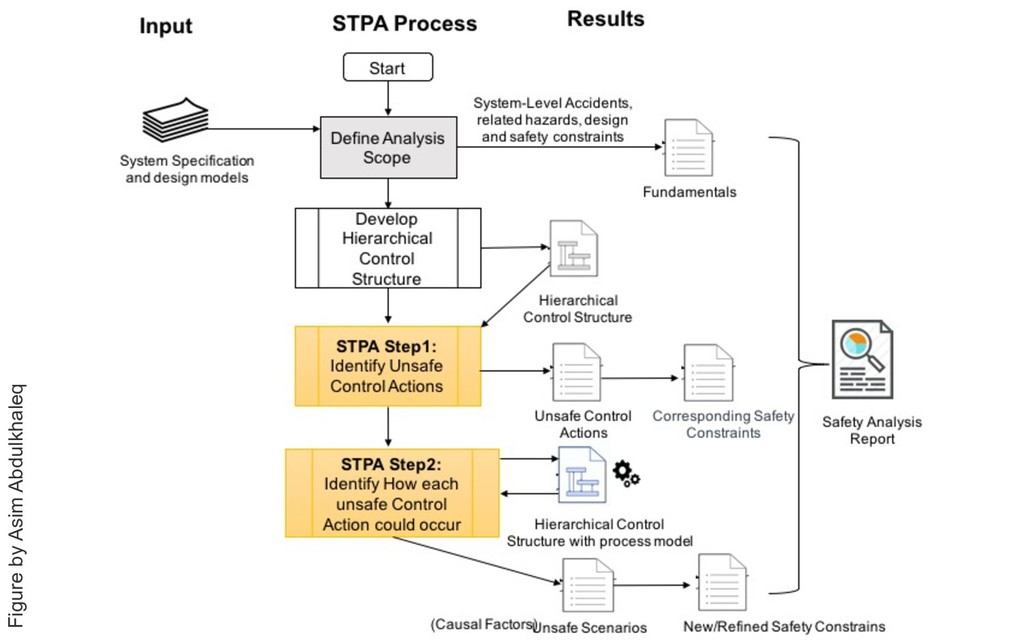
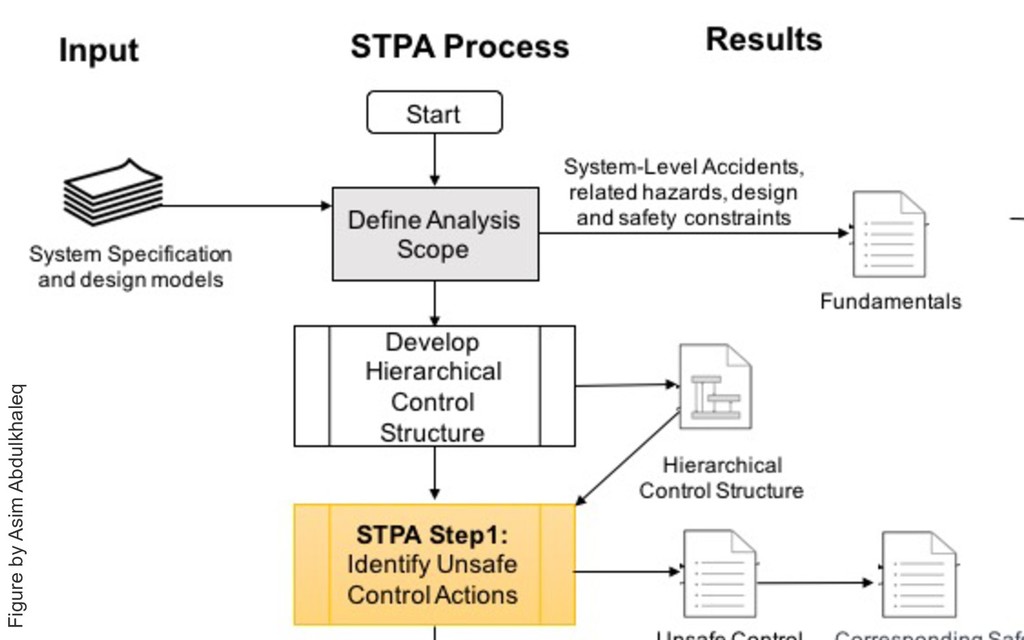
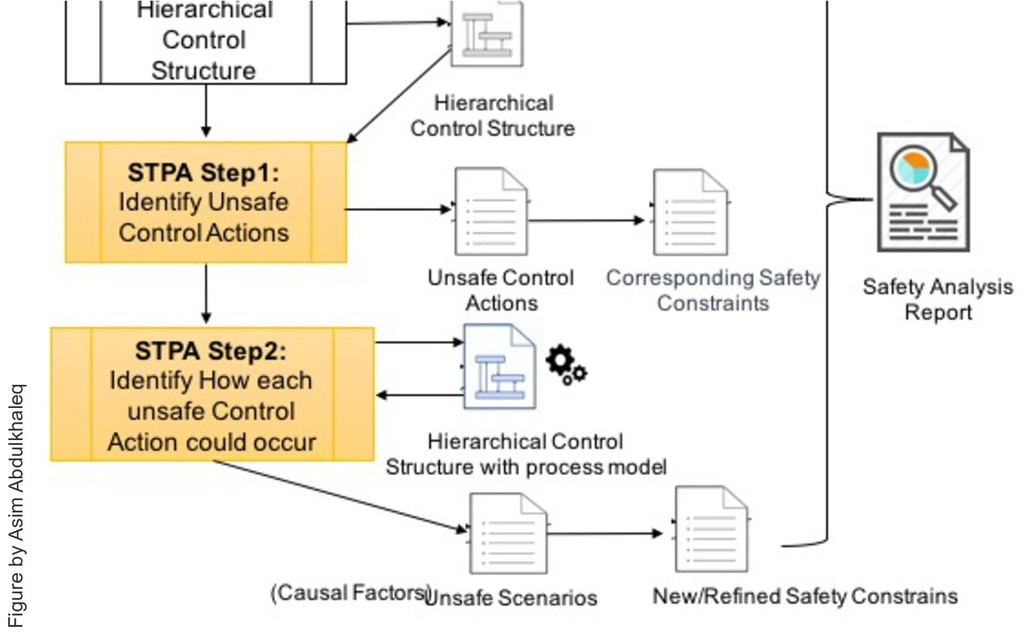
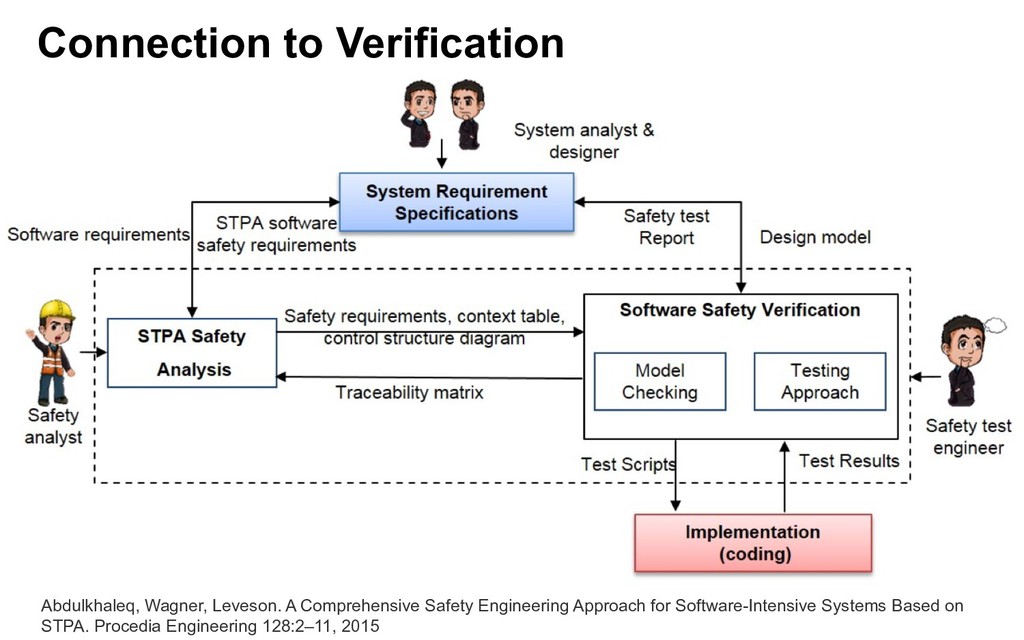
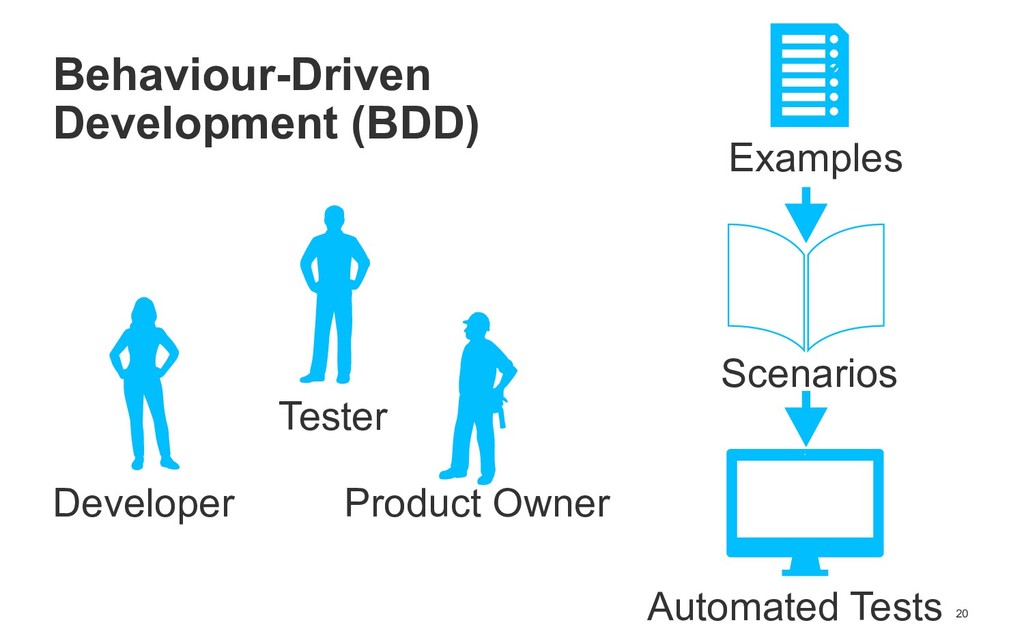
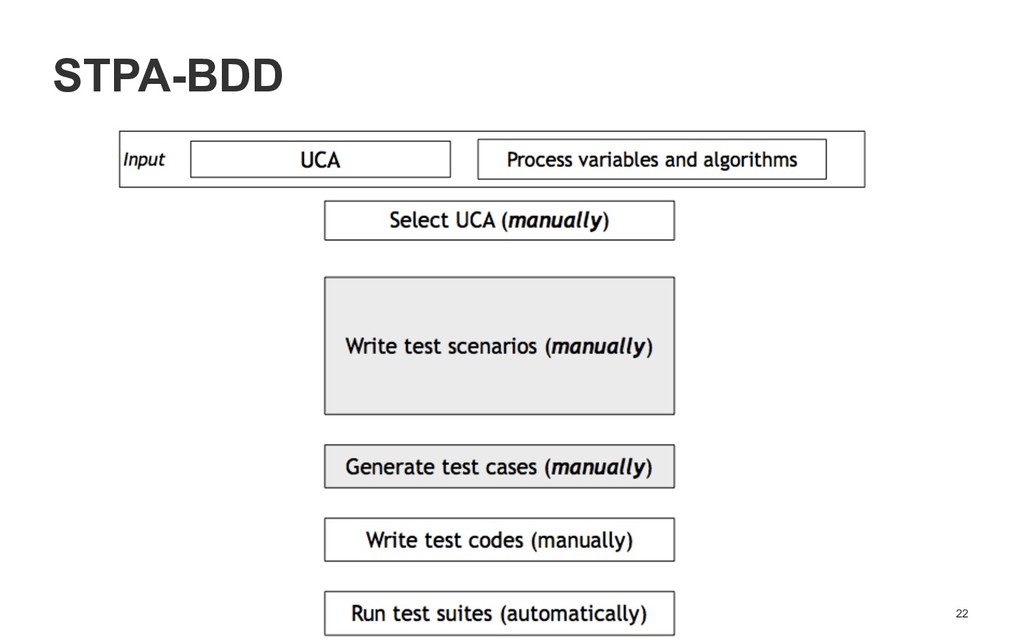
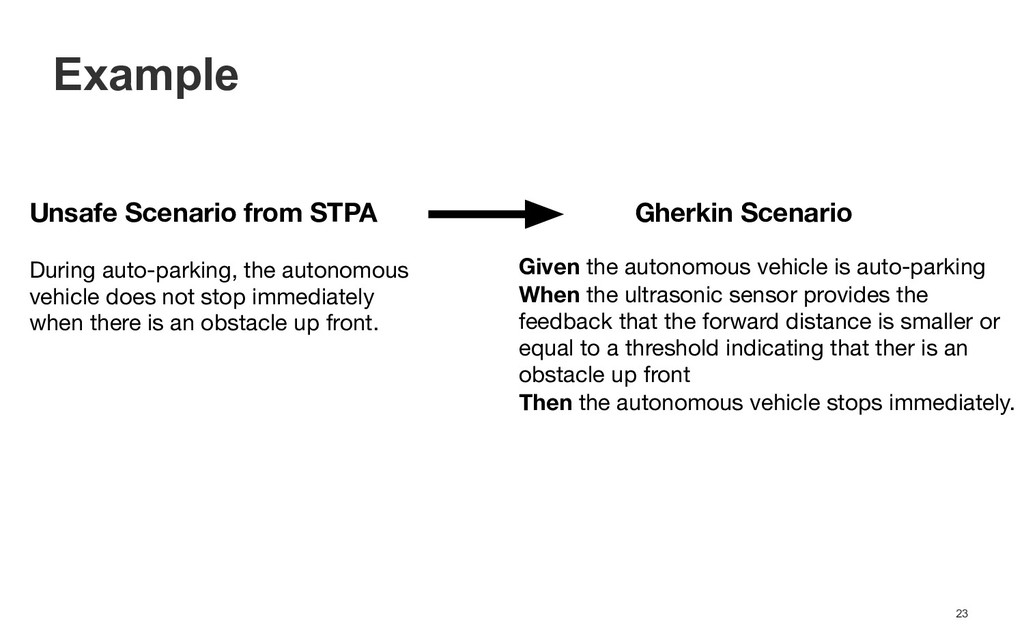
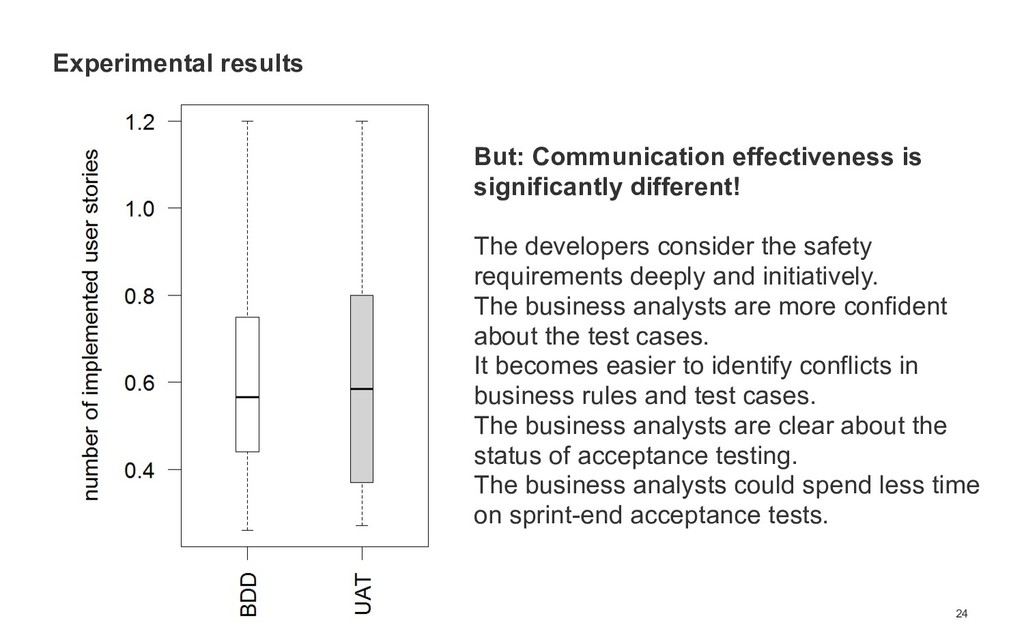
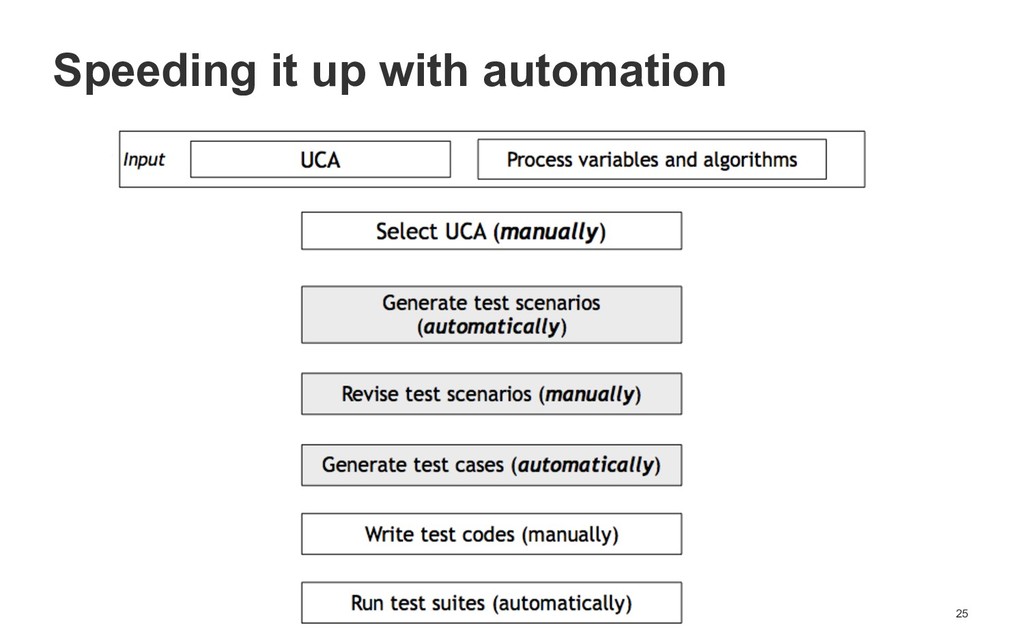
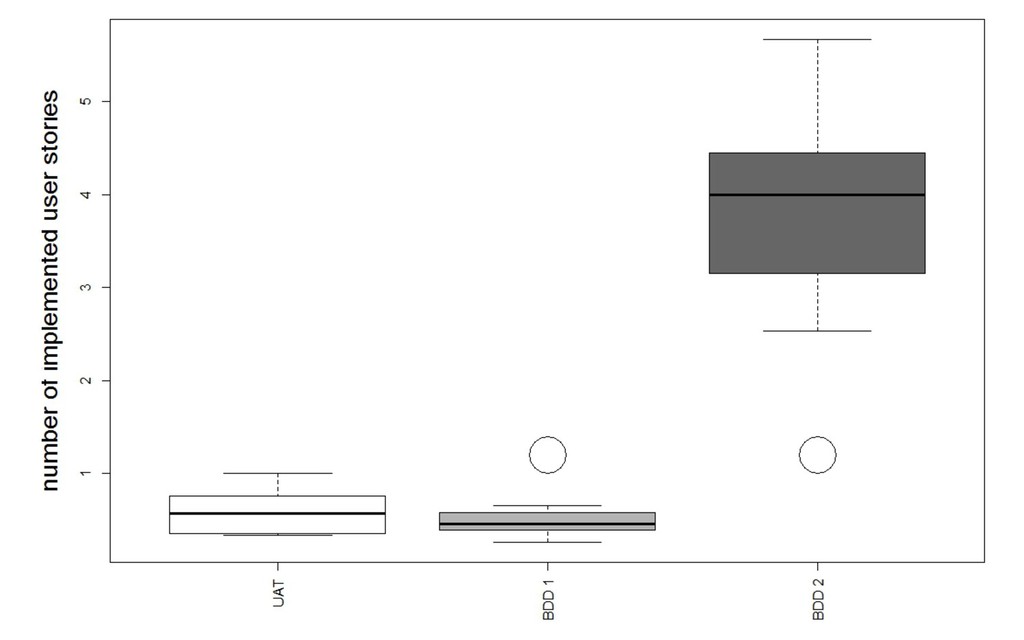
I gave a talk at the Embedded Software Engineering Kongress 2018 in Sindelfingen, Germany. It is a meeting of practitioners in the development of embedded software systems. I was presenting work we did on developing safety-critical systems in an agile way. In particular, I presented our Scrum variant that includes the safety analysis method STPA as well as our combination of BDD and STPA.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Prof. Dr. Stefan Wagner e-mail [email protected] phone +49 (0) 711](https://files.speakerdeck.com/presentations/d5da191db35846db9e8a0f8b5e039679/slide_27.jpg){kind=link}
{kind=link}