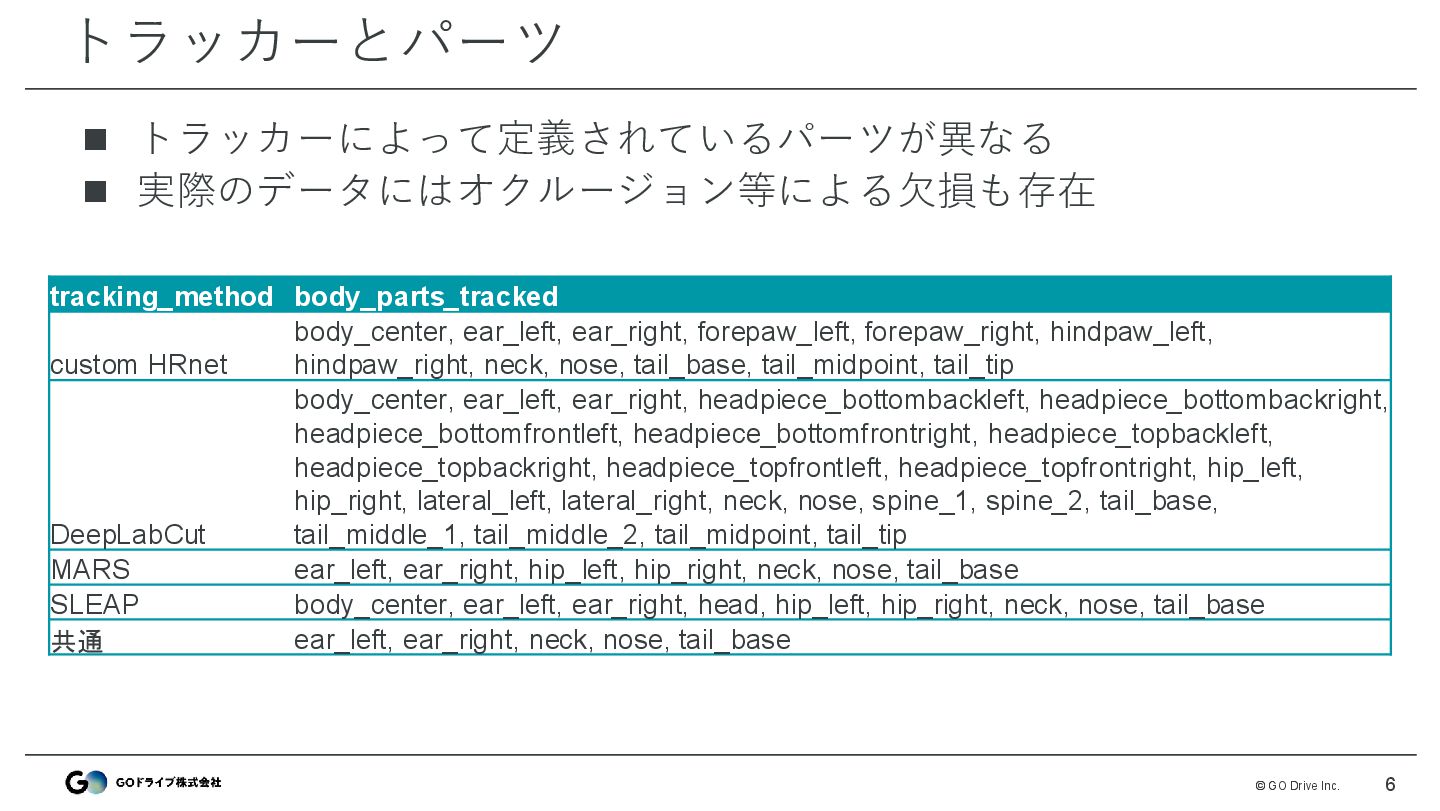
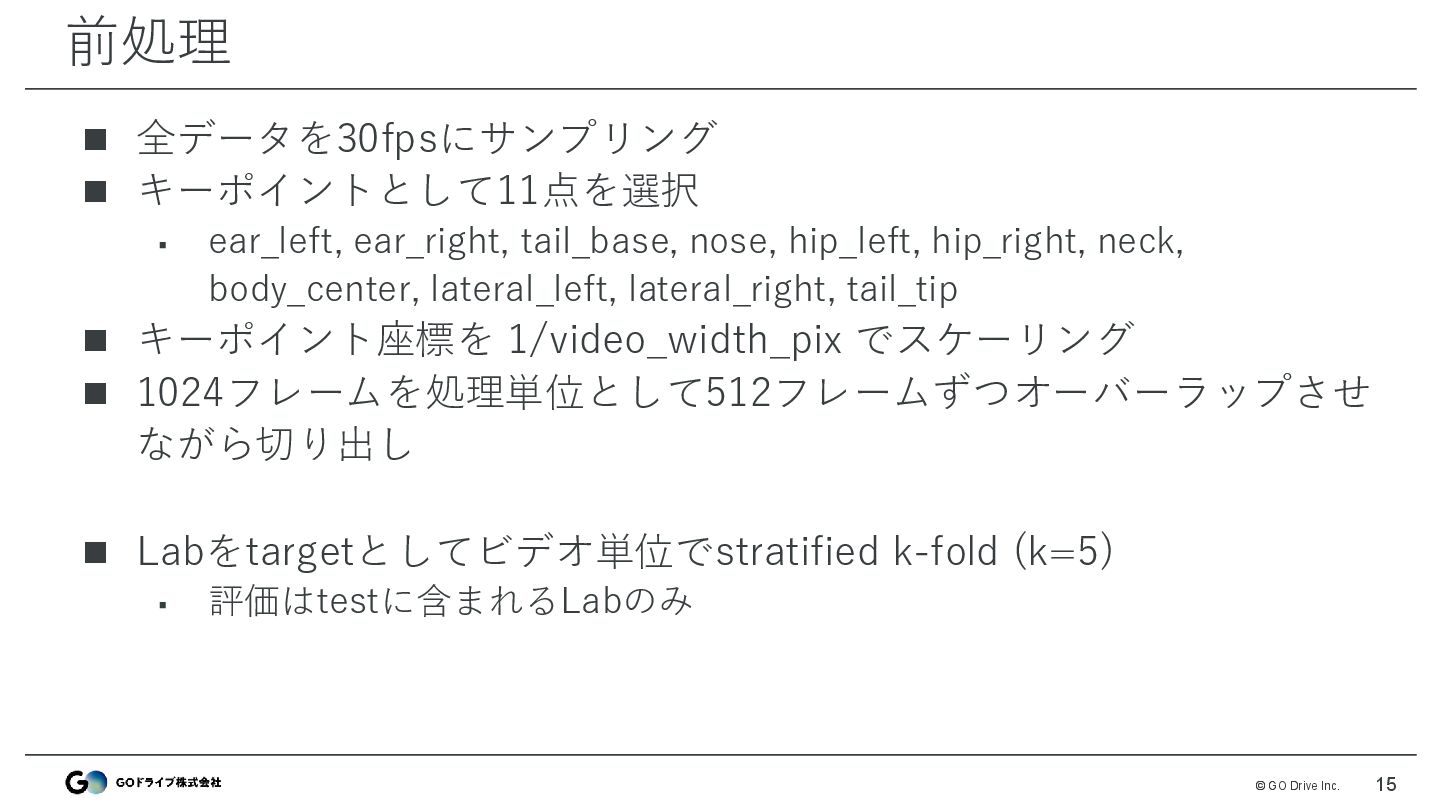
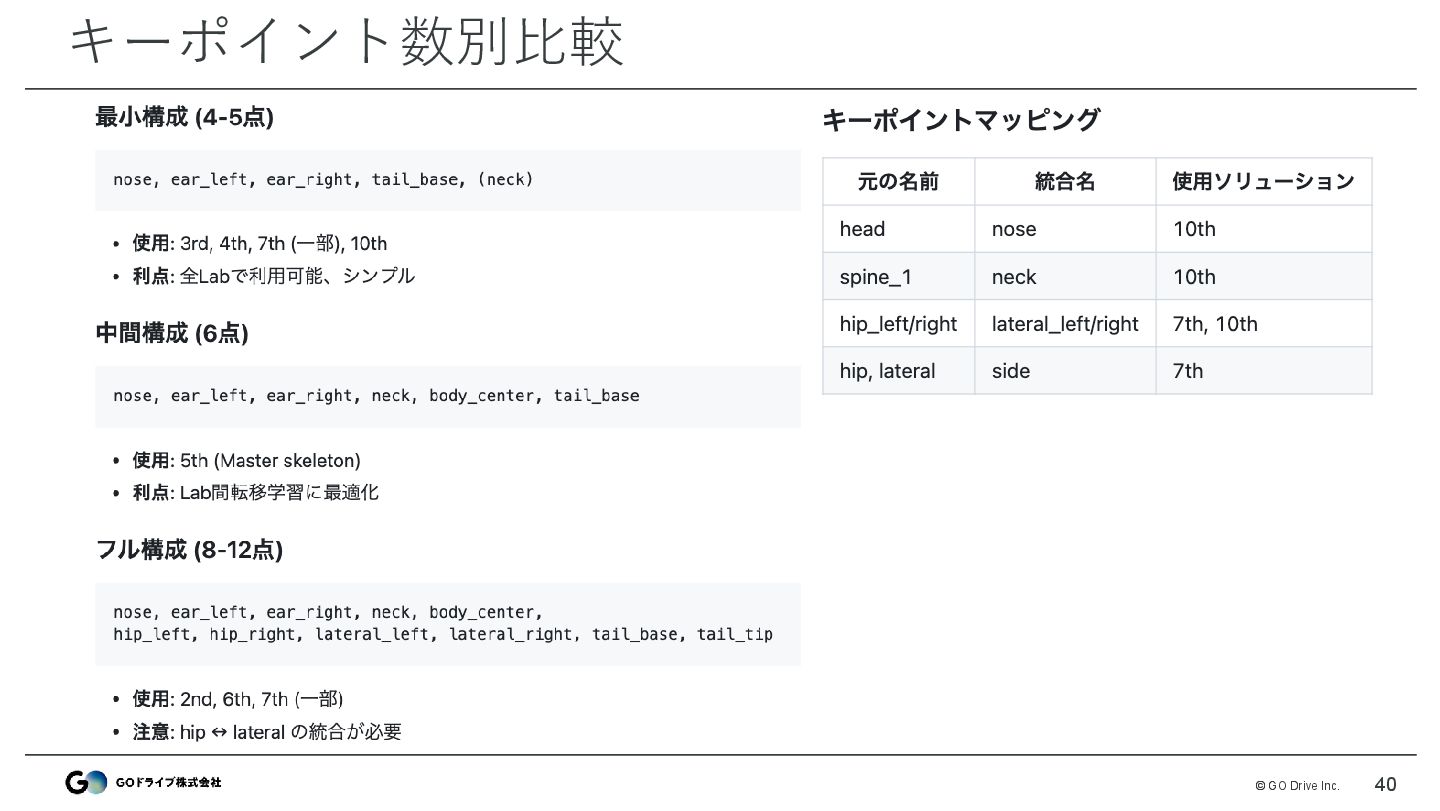
tracking_method body_parts_tracked custom HRnet body_center, ear_left, ear_right, forepaw_left, forepaw_right, hindpaw_left, hindpaw_right, neck, nose, tail_base, tail_midpoint, tail_tip DeepLabCut body_center, ear_left, ear_right, headpiece_bottombackleft, headpiece_bottombackright, headpiece_bottomfrontleft, headpiece_bottomfrontright, headpiece_topbackleft, headpiece_topbackright, headpiece_topfrontleft, headpiece_topfrontright, hip_left, hip_right, lateral_left, lateral_right, neck, nose, spine_1, spine_2, tail_base, tail_middle_1, tail_middle_2, tail_midpoint, tail_tip MARS ear_left, ear_right, hip_left, hip_right, neck, nose, tail_base SLEAP body_center, ear_left, ear_right, head, hip_left, hip_right, neck, nose, tail_base 共通 ear_left, ear_right, neck, nose, tail_base
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}