Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
ハンカチ落としの戦略最適化
Search
Katsuki Ohto
July 07, 2020
Science
1.2k
0
Share
ハンカチ落としの戦略最適化
漫画「嘘喰い」に登場するハンカチ落としゲームを簡略化してナッシュ均衡戦略を計算します。
Katsuki Ohto
July 07, 2020
More Decks by Katsuki Ohto
See All by Katsuki Ohto
負け側の残り枚数を最大化する二人単貧民の解析
yuricat
0
110
二人単貧民の消費枚数に関する勝利条件の一般化とその解析
yuricat
0
210
二人単貧民の定理を Coqで証明する試み
yuricat
0
210
Other Decks in Science
See All in Science
フィードフォワードニューラルネットワークを用いた記号入出力制御系に対する制御器設計 / Controller Design for Augmented Systems with Symbolic Inputs and Outputs Using Feedforward Neural Network
konakalab
0
130
Bリーグのショットデータを活用した得点期待値モデルの構築 / Construction of expected points model using shot data of B.LEAGUE
konakalab
0
130
水耕栽培:古代の知恵から宇宙農業まで
grow_design_lab
0
120
ITTF卓球世界ランキングのポイント比を用いた試合結果予測モデルの性能評価 / Performance evaluation of match result prediction models using the point ratio of the ITTF Table Tennis World Ranking
konakalab
0
120
Testing the Longevity Bottleneck Hypothesis
chinson03
0
290
Cross-Media Technologies, Information Science and Human-Information Interaction
signer
PRO
3
32k
Amusing Abliteration
ianozsvald
1
170
【RSJ2025】PAMIQ Core: リアルタイム継続学習のための⾮同期推論・学習フレームワーク
gesonanko
0
860
中央大学AI・データサイエンスセンター 2025年第6回イブニングセミナー 『知能とはなにか ヒトとAIのあいだ』
tagtag
PRO
0
150
Conversation is the New Dashboard: 属人性を排除する第4世代BIツールの勢力図
shomaekawa
1
570
次代のデータサイエンティストへ~スキルチェックリスト、タスクリスト更新~
datascientistsociety
PRO
3
41k
Vibecoding for Product Managers
ibknadedeji
0
160
Featured
See All Featured
Why Your Marketing Sucks and What You Can Do About It - Sophie Logan
marketingsoph
0
150
Claude Code のすすめ
schroneko
67
220k
Testing 201, or: Great Expectations
jmmastey
46
8.2k
Chasing Engaging Ingredients in Design
codingconduct
0
190
A Modern Web Designer's Workflow
chriscoyier
698
190k
Practical Tips for Bootstrapping Information Extraction Pipelines
honnibal
25
1.9k
Art, The Web, and Tiny UX
lynnandtonic
304
21k
Build your cross-platform service in a week with App Engine
jlugia
234
18k
Design of three-dimensional binary manipulators for pick-and-place task avoiding obstacles (IECON2024)
konakalab
0
430
Save Time (by Creating Custom Rails Generators)
garrettdimon
PRO
32
3.1k
Optimising Largest Contentful Paint
csswizardry
37
3.7k
The untapped power of vector embeddings
frankvandijk
2
1.7k
Transcript
ϋϯΧνམͱ͠ ͷઓུ࠷దԽ Katsuki Ohto Optimization Night #3 LT
ϋϯΧνམͱ͠ ➤ Ұൠతʹ… தఔͷਓͰߦ͏ ϨΫϦΤʔγϣϯήʔϜ ➤ ອըʮӕ͍ᷰʯಡऀʹ… ೋਓͰ໋ΛṌ͚ͯઓ͏ήʔϜ ϋϯΧνΛམͱ͢ํΛʮυϩοϓଆʯৼΓ͍ͯϋϯΧν͕མ ͪͨͷΛ֬ೝ͢ΔํΛʮνΣοΫଆʯͱ͠ɺަޓʹ୲͍ͯ͠
͘ɻਐߦʹ࣌ใΛར༻͢Δɻ1λʔϯ1ؒͱ͠ɺυϩοϓ ଆඞͣͦͷ࣌ؒʹམͱ͞ͳ͚ΕͳΒͣɺνΣοΫଆඞͣ Ұ͚ͩৼΓ͔ͳ͚ΕͳΒͳ͍ɻυϩοϓଆ͕ϋϯΧνΛ མͱͨ͠ॠ͔ؒΒνΣοΫଆͷʮ࠲ࢹͷࡍʯ͕ελʔτɺ༰ث ͷத֖͕։͖γϦϯμʔʹʮྟࢮༀʯ͕ཷ·͍ͬͯ͘ɻৼΓ͍ ͯϋϯΧν͕མ͍ͪͯΕνΣοΫޭͱͳΓத֖͕ด͡Δ͕ ٯʹམ͍ͪͯͳ͚ΕʮϖφϧςΟʯ͕ൃಈɻʮͦͷ࣌Ͱཷ ·͍ͬͯΔྟࢮༀʴ1ؒͰཷ·ΔྔʯΛͦͷͰࣹʢγϦϯ μʔʹྟࢮༀ͕5ؒཷ·ͬͨ߹ଈࣹʣ͞ΕΔɻͦͯ͠ ຺ഥ͕ࢭ·ͬͨͷΛ֬ೝ͔ͯ͠Βʮྟࢮʯ͕ελʔτɻϖφϧ ςΟඵΛফԽͨ͠ΒྟࢮༀͱରʹͳΔͷʮોੜༀʯΛ ্ࣹͨ͠Ͱ15ճݶఆͷ৺ଁϚοαʔδʢ10ඵؒ΄ͲʣΛߦ ͍ɺͦΕͰોੜͰ͖ͨΒήʔϜଓߦɺͰ͖ͳ͚Εউෛ͋Γɻ Wikipedia ʮӕ͍ᷰʯΑΓ
؆ུԽϧʔϧ ➤ υϩοϓଆ …ϋϯΧνΛམͱ͢ଆ ➤ νΣοΫଆ …ৼΓฦΔଆ ➤ ࣌ࠁ T
ඵؒ ➤ ϖφϧςΟʢ㲈ใुʣ ɾνΣοΫଆ͕མͱ͞Εͯ ɹ t ඵޙʹৼΓฦΔ… t ɾνΣοΫଆ͕ઌʹৼΓฦΔ ɹ… T ➤ ອըͰɺ͜ΕΛ෦ήʔϜͱͯ͠ ܁Γฦ͢ཁૉ͕͋Δ͕ɺ ࠓճ͜ͷҰճͷήʔϜ͚ͩߟ͑Δ
ಉ࣌ ήʔϜ ͷੑ࣭
͡ΌΜ͚Μ ➤ άʔΛग़͢ઓུʹ ˠύʔΛग़͢ઓུ͕༗ޮ ➤ ύʔΛग़͢ઓུʹ ˠνϣΩΛग़͢ઓུ͕༗ޮ ➤ νϣΩΛग़͢ઓུʹ ˠάʔΛग़͢ઓུ͕༗ޮ
➤ ઓུ͕॥͠ɺৗʹ࠷దͳ ઓུ͕ఆ·Βͳ͍ φογϡۉߧɹΛߟ͑Δ
φογϡۉߧઓུ ➤ ยํͷϓϨΠϠ͕͔ࣗΒख Λม͑ΔϝϦοτ͕ͳ͍ઓུ ʢͷΈ߹Θͤʣ ➤ ғޟকعͳΒউརखͲΕ͔ ҰͭΛબͿઓུͰOK ➤ ಉ࣌ήʔϜ
ɾ͡ΌΜ͚Μ ෆશใήʔϜ ɾϙʔΧʔɹɾຑ ͜ΕΒͷήʔϜͰ φογϡۉߧ֬తઓུ
ઓུ࠷ద Խ
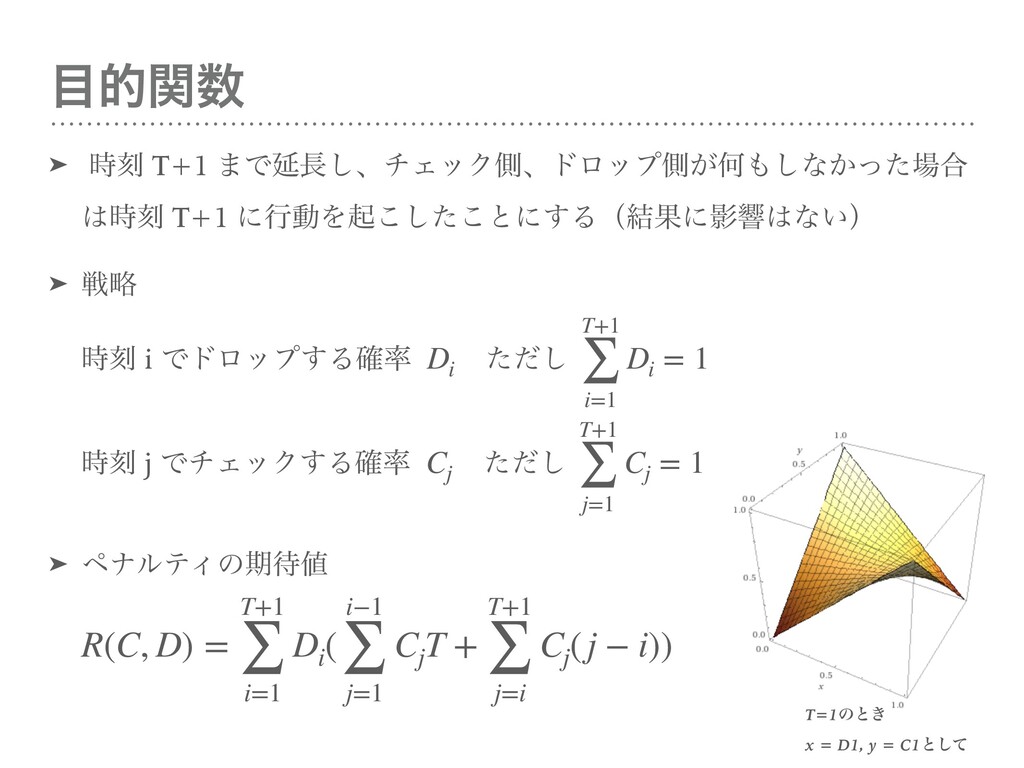
తؔ ➤ ࣌ࠁ T+1 ·ͰԆ͠ɺνΣοΫଆɺυϩοϓଆ͕Կ͠ͳ͔ͬͨ߹ ࣌ࠁ T+1 ʹߦಈΛىͨ͜͜͠ͱʹ͢Δʢ݁ՌʹӨڹͳ͍ʣ ➤ ઓུ
࣌ࠁ i Ͱυϩοϓ͢Δ֬ ͨͩ͠ ࣌ࠁ j ͰνΣοΫ͢Δ֬ ͨͩ͠ ➤ ϖφϧςΟͷظ Di T+1 ∑ i=1 Di = 1 Cj T+1 ∑ j=1 Cj = 1 R(C, D) = T+1 ∑ i=1 Di ( i−1 ∑ j=1 Cj T + T+1 ∑ j=i Cj (j − i)) T=1ͷͱ͖ x = D1, y = C1ͱͯ͠
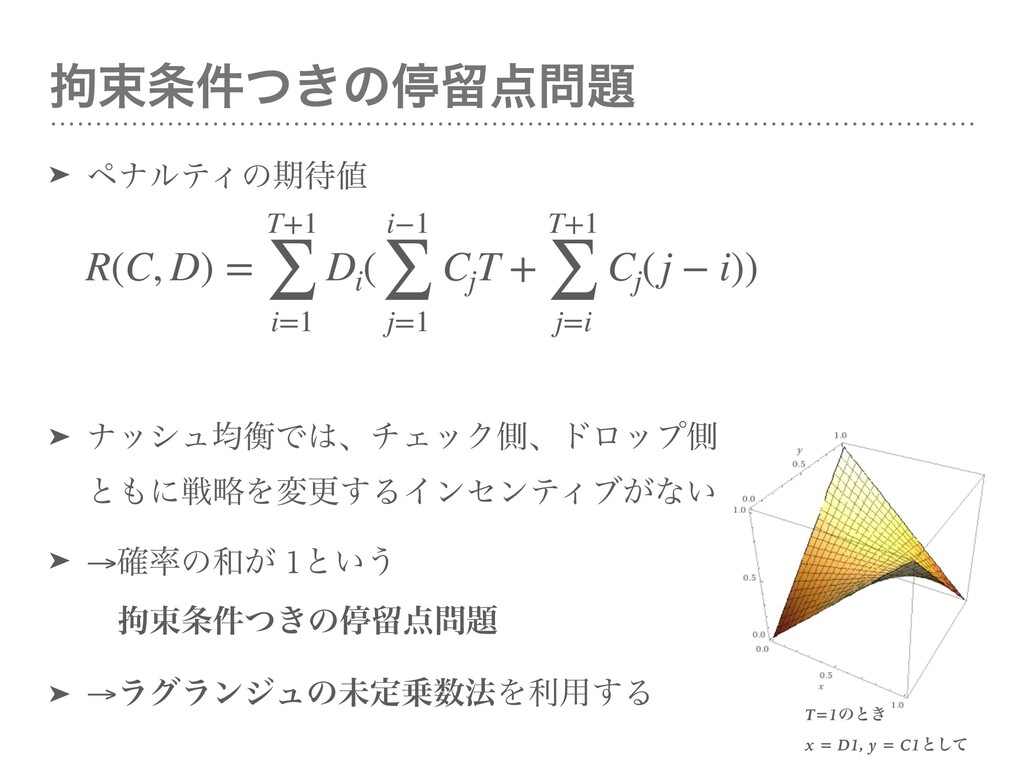
߆ଋ͖݅ͭͷఀཹ ➤ ϖφϧςΟͷظ ➤ φογϡۉߧͰɺνΣοΫଆɺυϩοϓଆ ͱʹઓུΛมߋ͢ΔΠϯηϯςΟϒ͕ͳ͍ ➤ →֬ͷ͕ 1ͱ͍͏ ɹ߆ଋ͖݅ͭͷఀཹ
➤ →ϥάϥϯδϡͷະఆ๏Λར༻͢Δ R(C, D) = T+1 ∑ i=1 Di ( i−1 ∑ j=1 Cj T + T+1 ∑ j=i Cj (j − i)) T=1ͷͱ͖ x = D1, y = C1ͱͯ͠
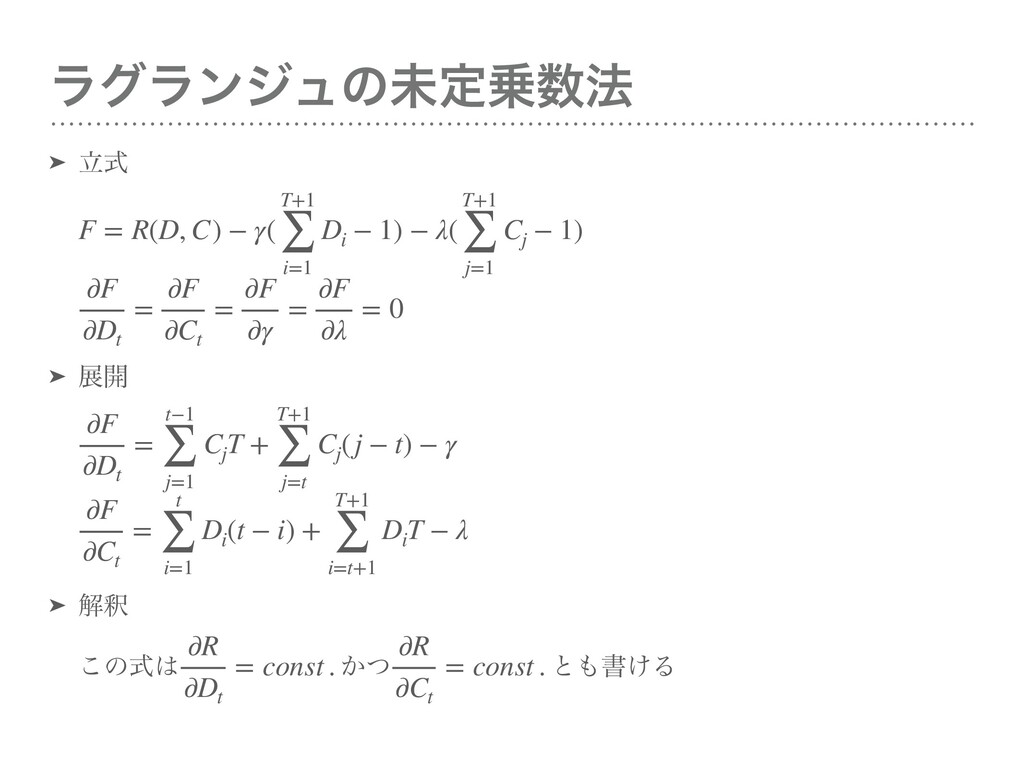
ϥάϥϯδϡͷະఆ๏ ➤ ཱࣜ ➤ ల։ ➤ ղऍ ͜ͷࣜ
͔ͭ ͱॻ͚Δ F = R(D, C) − γ( T+1 ∑ i=1 Di − 1) − λ( T+1 ∑ j=1 Cj − 1) ∂F ∂Dt = ∂F ∂Ct = ∂F ∂γ = ∂F ∂λ = 0 ∂F ∂Dt = t−1 ∑ j=1 Cj T + T+1 ∑ j=t Cj (j − t) − γ ∂F ∂Ct = t ∑ i=1 Di (t − i) + T+1 ∑ i=t+1 Di T − λ ∂R ∂Dt = const . ∂R ∂Ct = const .
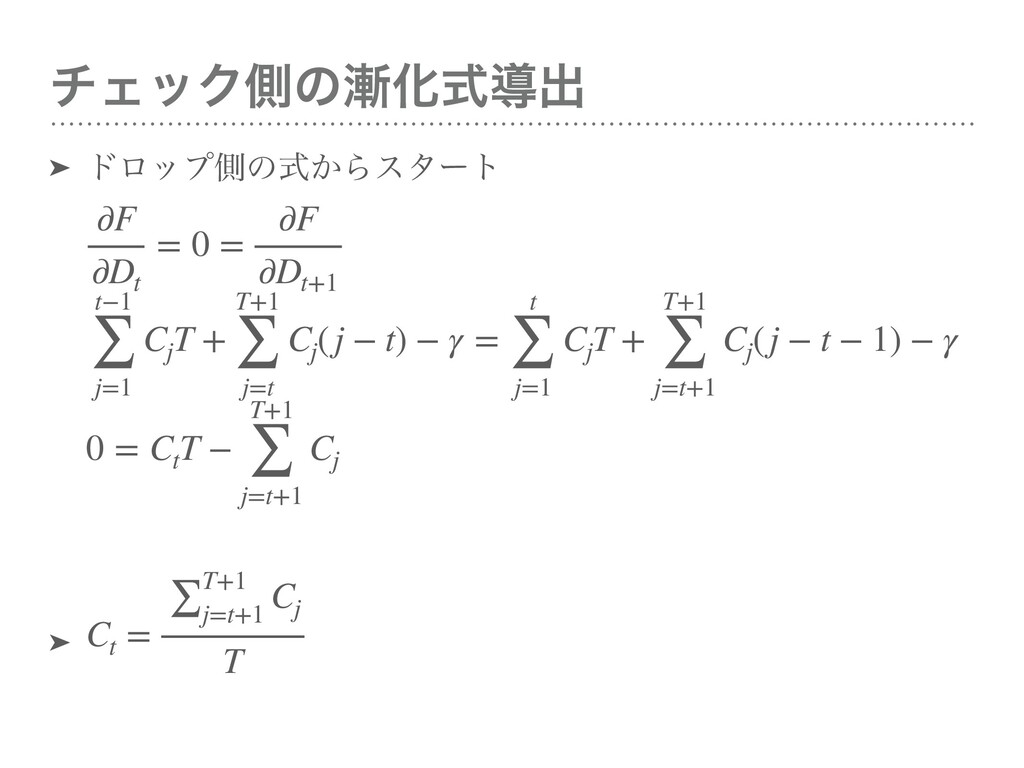
νΣοΫଆͷԽࣜಋग़ ➤ υϩοϓଆͷ͔ࣜΒελʔτ ➤ ∂F ∂Dt =
0 = ∂F ∂Dt+1 t−1 ∑ j=1 Cj T + T+1 ∑ j=t Cj (j − t) − γ = t ∑ j=1 Cj T + T+1 ∑ j=t+1 Cj (j − t − 1) − γ 0 = Ct T − T+1 ∑ j=t+1 Cj Ct = ∑T+1 j=t+1 Cj T
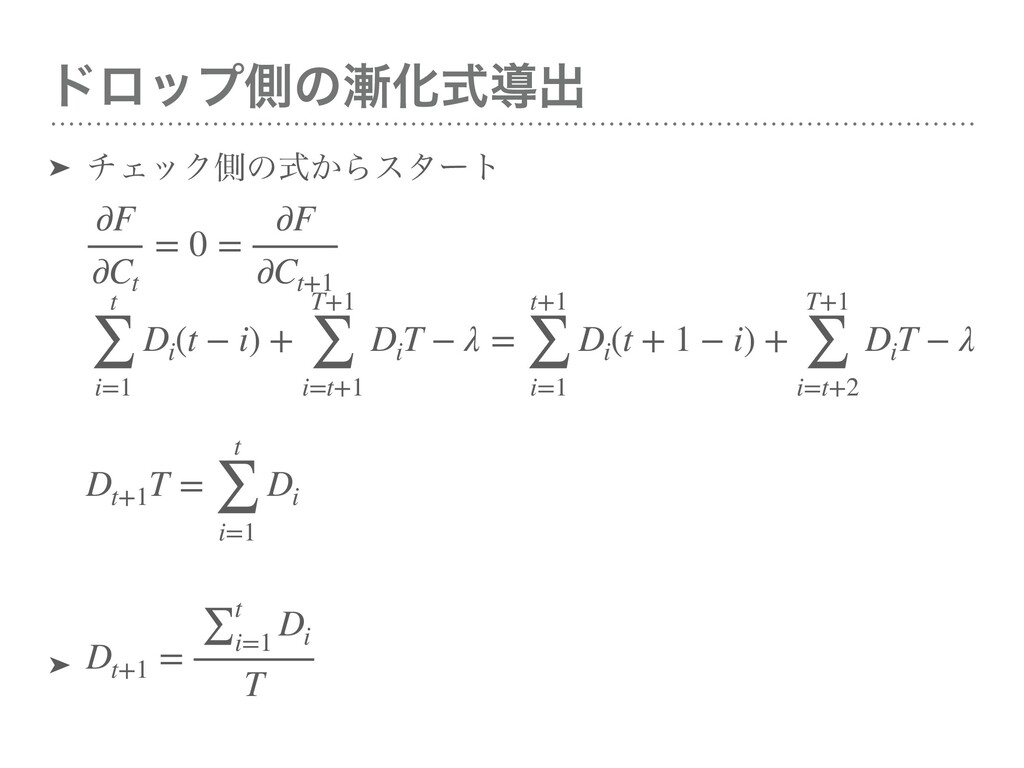
υϩοϓଆͷԽࣜಋग़ ➤ νΣοΫଆͷ͔ࣜΒελʔτ ➤ ∂F ∂Ct =
0 = ∂F ∂Ct+1 t ∑ i=1 Di (t − i) + T+1 ∑ i=t+1 Di T − λ = t+1 ∑ i=1 Di (t + 1 − i) + T+1 ∑ i=t+2 Di T − λ Dt+1 T = t ∑ i=1 Di Dt+1 = ∑t i=1 Di T
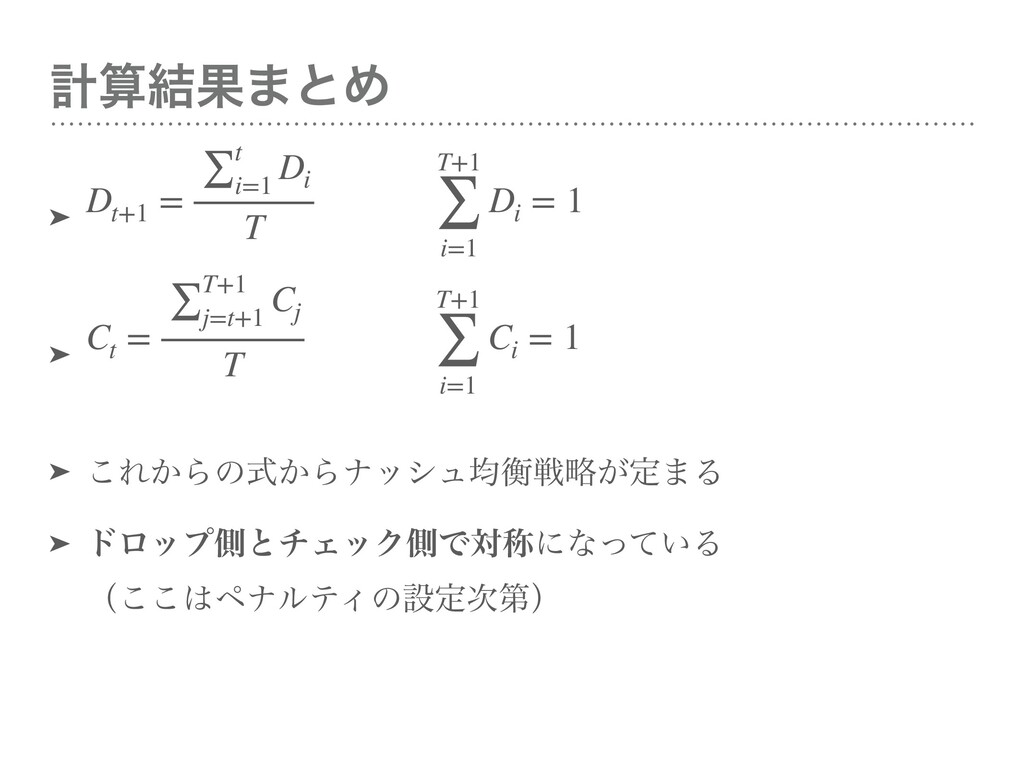
ܭࢉ݁Ռ·ͱΊ ➤ ➤ ➤ ͜Ε͔Βͷ͔ࣜΒφογϡۉߧઓུ͕ఆ·Δ ➤ υϩοϓଆͱνΣοΫଆͰରশʹͳ͍ͬͯΔ ʢ͜͜ϖφϧςΟͷઃఆ࣍ୈʣ Dt+1
= ∑t i=1 Di T T+1 ∑ i=1 Di = 1 Ct = ∑T+1 j=t+1 Cj T T+1 ∑ i=1 Ci = 1
ઓུՄࢹ Խ
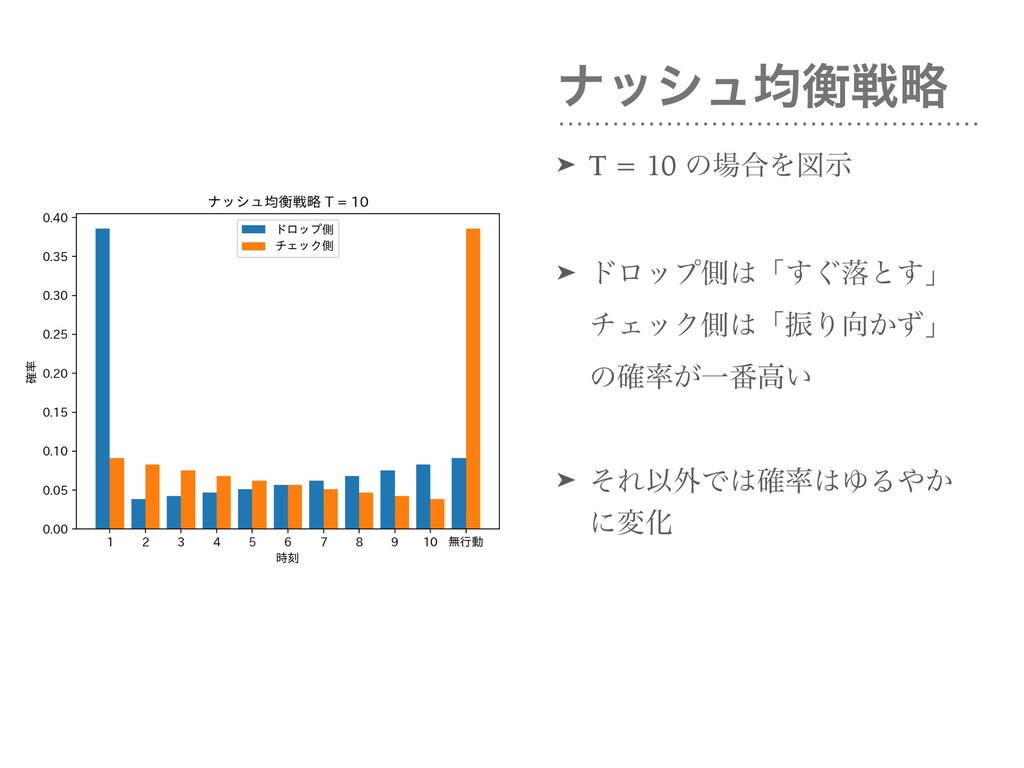
φογϡۉߧઓུ ➤ T = 10 ͷ߹Λਤࣔ ➤ υϩοϓଆʮ͙͢མͱ͢ʯ νΣοΫଆʮৼΓ͔ͣʯ ͷ͕֬Ұ൪ߴ͍
➤ ͦΕҎ֎Ͱ֬ΏΔ͔ ʹมԽ
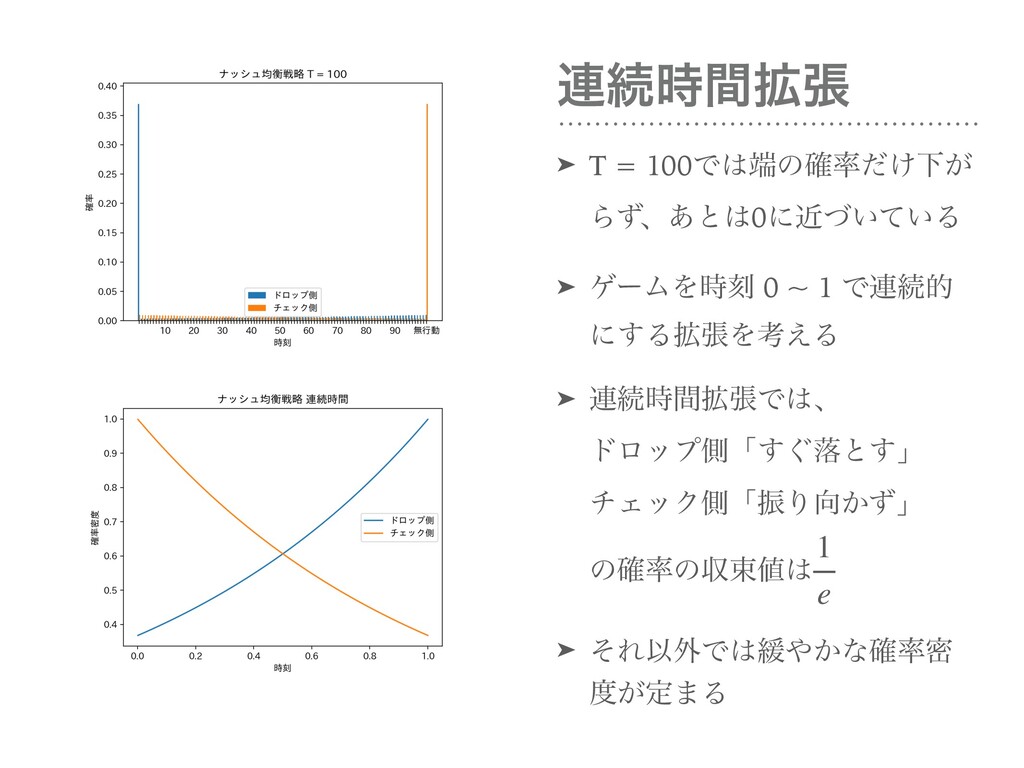
࿈ଓ֦࣌ؒு ➤ T = 100Ͱͷ͚֬ͩԼ͕ Βͣɺ͋ͱ0ʹ͍͍ۙͮͯΔ ➤ ήʔϜΛ࣌ࠁ 0 ~
1 Ͱ࿈ଓత ʹ͢Δ֦ுΛߟ͑Δ ➤ ࿈ଓ֦࣌ؒுͰɺ υϩοϓଆʮ͙͢མͱ͢ʯ νΣοΫଆʮৼΓ͔ͣʯ ͷ֬ͷऩଋ ➤ ͦΕҎ֎Ͱ؇͔ͳ֬ີ ͕ఆ·Δ 1 e
͓ΘΓʹ ➤ ͡ΌΜ͚Μͱಉ͘͡ɺ φογϡۉߧઓུʹରͯ͠ઓུΛมԽͤͯ͞ɺ ϖφϧςΟͷظมԽͤͣɺฏۉҎ্উͭ͜ͱͳ͍ ➤ ͨͩ͠ɺφογϡۉߧΛ಄ʹೖΕ͓ͯ͘͜ͱͰɺ ઌʹࣗͷบΛόϥͣ͞ʹྫྷ੩ʹઓ͏͜ͱͰ͖Δ ➤ ࠓճ͕ࣜ؆୯ͰखܭࢉͰ͖͕ͨɺෳࡶͳ߹ػցͰ࠷దԽ͍ͯ͘͠
߹͋Δ ➤ ໋ΛṌ͚ͯʢṌ͚ͳͯ͘ʣ ϋϯΧνམͱ͠Ͱઓ͏߹ʹ φογϡۉߧͷ͜ͱࢥ͍ग़ͯ͠ཉ͍͠Ͱ͢ɻ
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}