Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
【RSJ2025】PAMIQ Core: リアルタイム継続学習のための⾮同期推論・学習フレームワーク
Search
Geson Anko
September 04, 2025
Science
1k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
【RSJ2025】PAMIQ Core: リアルタイム継続学習のための⾮同期推論・学習フレームワーク
第43回 日本ロボット学会学術講演会(RSJ 2025)で発表した際に用いたスライドです。
公開にあたり、一部修正があります。
https://ac.rsj-web.org/2025/
Geson Anko
September 04, 2025
More Decks by Geson Anko
See All by Geson Anko
2025年12月3日.人類には激kawaiiネコミミメイドロボが必要である
gesonanko
0
54
ML集会 2025年10月15日 LTのはじめかた
gesonanko
0
68
Pythonクラス基礎
gesonanko
1
140
自律機械知能基礎論 2024
gesonanko
0
51
2024年5月18日 XRMTGエンジニア飲み集会LT
gesonanko
0
51
AMI System基礎 2025
gesonanko
1
110
2025年1月10日 エンジニア集会 誰かと開発するために
gesonanko
0
120
2024年3月27日 ML集会 非同期AMI基盤システムα
gesonanko
0
82
非同期AMI Sys ロードマップ to Milestone 2
gesonanko
0
58
Other Decks in Science
See All in Science
Bear-safety-running
akirun_run
0
170
Distributional Regression
tackyas
0
560
JSAI2026企画セッションKS-14 インタビュー集『⼈⼯知能と哲学と四つの問い』が提起する⼈⼯知能のこれからの課題 趣旨説明 / JSAI2026 Special Session: A Collection of Interviews, “Artificial Intelligence, Philosophy, and Four Questions”
ykiyota
0
390
TypeScript で WebAssembly を用いた 型安全なプラグイン設計
nagano
2
570
データベース06: SQL (3/3) 副問い合わせ
trycycle
PRO
1
1.1k
Tensor Factorization Meets Deformed Information Geometry: Convex Relaxation under Deformed Algebra
gkazunii
0
120
水耕栽培を始める前に知っておきたい植物の科学
grow_design_lab
0
280
生成AI・プレプリント時代における 研究成果公開の再設計 ― トップカンファレンス文化はどこへ向かうのか / Redesigning the Dissemination of Research Outputs in the Age of Generative AI and Preprints — Where Is the Top-Conference Culture Heading?
ykiyota
0
29k
Conversation is the New Dashboard: 属人性を排除する第4世代BIツールの勢力図
shomaekawa
1
610
機械学習 - ニューラルネットワーク入門
trycycle
PRO
0
1.1k
データベース02: データベースの概念
trycycle
PRO
2
1.3k
Testing the Longevity Bottleneck Hypothesis
chinson03
0
380
Featured
See All Featured
How People are Using Generative and Agentic AI to Supercharge Their Products, Projects, Services and Value Streams Today
helenjbeal
1
240
Building a A Zero-Code AI SEO Workflow
portentint
PRO
0
640
How to Grow Your eCommerce with AI & Automation
katarinadahlin
PRO
1
230
BBQ
matthewcrist
89
10k
Max Prin - Stacking Signals: How International SEO Comes Together (And Falls Apart)
techseoconnect
PRO
0
320
The Pragmatic Product Professional
lauravandoore
37
7.4k
AI Search: Implications for SEO and How to Move Forward - #ShenzhenSEOConference
aleyda
1
1.3k
The Impact of AI in SEO - AI Overviews June 2024 Edition
aleyda
5
1.1k
Stop Working from a Prison Cell
hatefulcrawdad
274
21k
Tips & Tricks on How to Get Your First Job In Tech
honzajavorek
1
620
エンジニアに許された特別な時間の終わり
watany
108
250k
Bioeconomy Workshop: Dr. Julius Ecuru, Opportunities for a Bioeconomy in West Africa
akademiya2063
PRO
1
180
Transcript
リアルタイム継続学習のための ⾮同期推論・学習フレームワーク ML集会, GOP Co., Ltd. 撮影OK
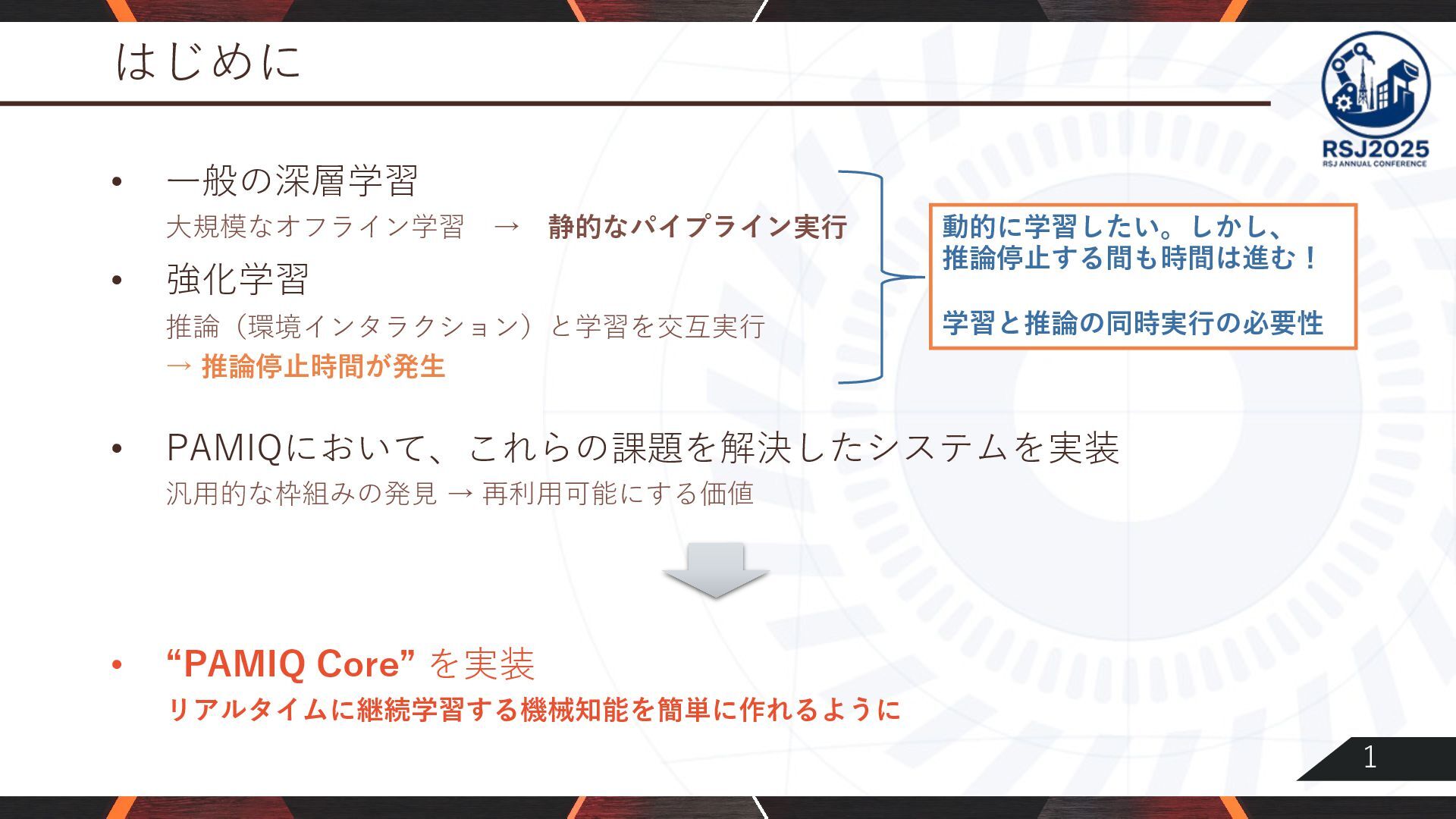
1 はじめに • ⼀般の深層学習 ⼤規模なオフライン学習 → 静的なパイプライン実⾏ • 強化学習 推論(環境インタラクション)と学習を交互実⾏
→ 推論停⽌時間が発⽣ 動的に学習したい。しかし、 推論停⽌する間も時間は進む! 学習と推論の同時実⾏の必要性 • “PAMIQ Core” を実装 リアルタイムに継続学習する機械知能を簡単に作れるように • PAMIQにおいて、これらの課題を解決したシステムを実装 汎⽤的な枠組みの発⾒ → 再利⽤可能にする価値
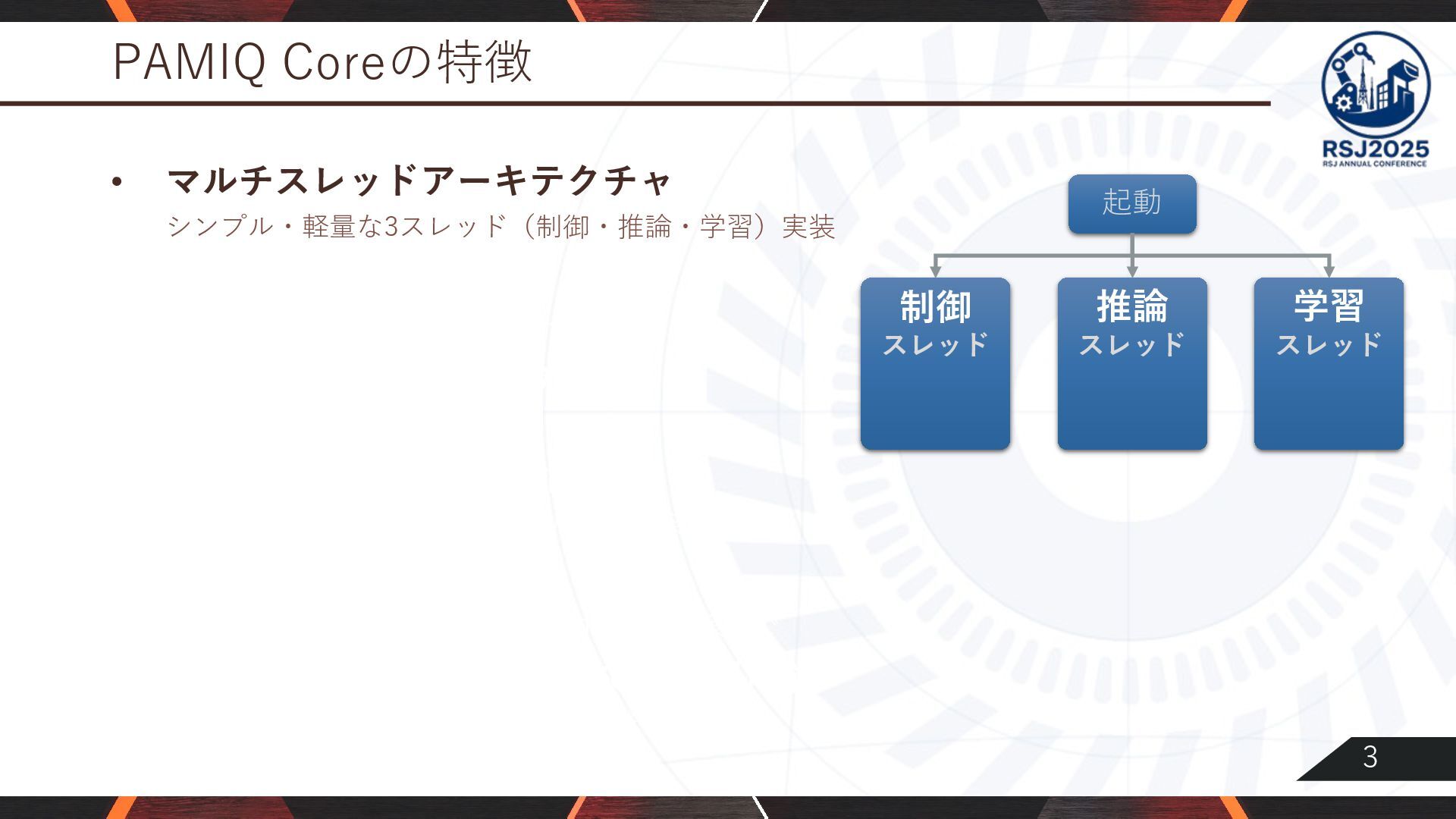
2 PAMIQ Coreの特徴 • マルチスレッドアーキテクチャ シンプル・軽量な3スレッド(制御・推論・学習)実装 • モジュラー設計 コンポーネントを基底クラスを元に実装。 •
既存フレームワークとの統合 PyTorch, Gymansium (OpenAI Gym) • 継続学習の運⽤⽀援機能 インタラクティブ制御コンソール、状態保存など • 段階的なサンプル 最⼩実装から実⽤サンプル、VRChatへの実装まで • “pip install pamiq-core” で即利⽤可能 Python Package Index (PyPI)へ公開済
3 PAMIQ Coreの特徴 • マルチスレッドアーキテクチャ シンプル・軽量な3スレッド(制御・推論・学習)実装 • モジュラー設計 コンポーネントを基底クラスを元に実装。 •
既存フレームワークとの統合 PyTorch, Gymansium (OpenAI Gym) • 継続学習の運⽤⽀援機能 インタラクティブ制御コンソール、状態保存など • 段階的なサンプル 最⼩実装から実⽤サンプル、VRChatへの実装まで • “pip install pamiq-core” で即利⽤可能 Python Package Index (PyPI)へ公開済 起動 推論 スレッド 学習 スレッド 制御 スレッド
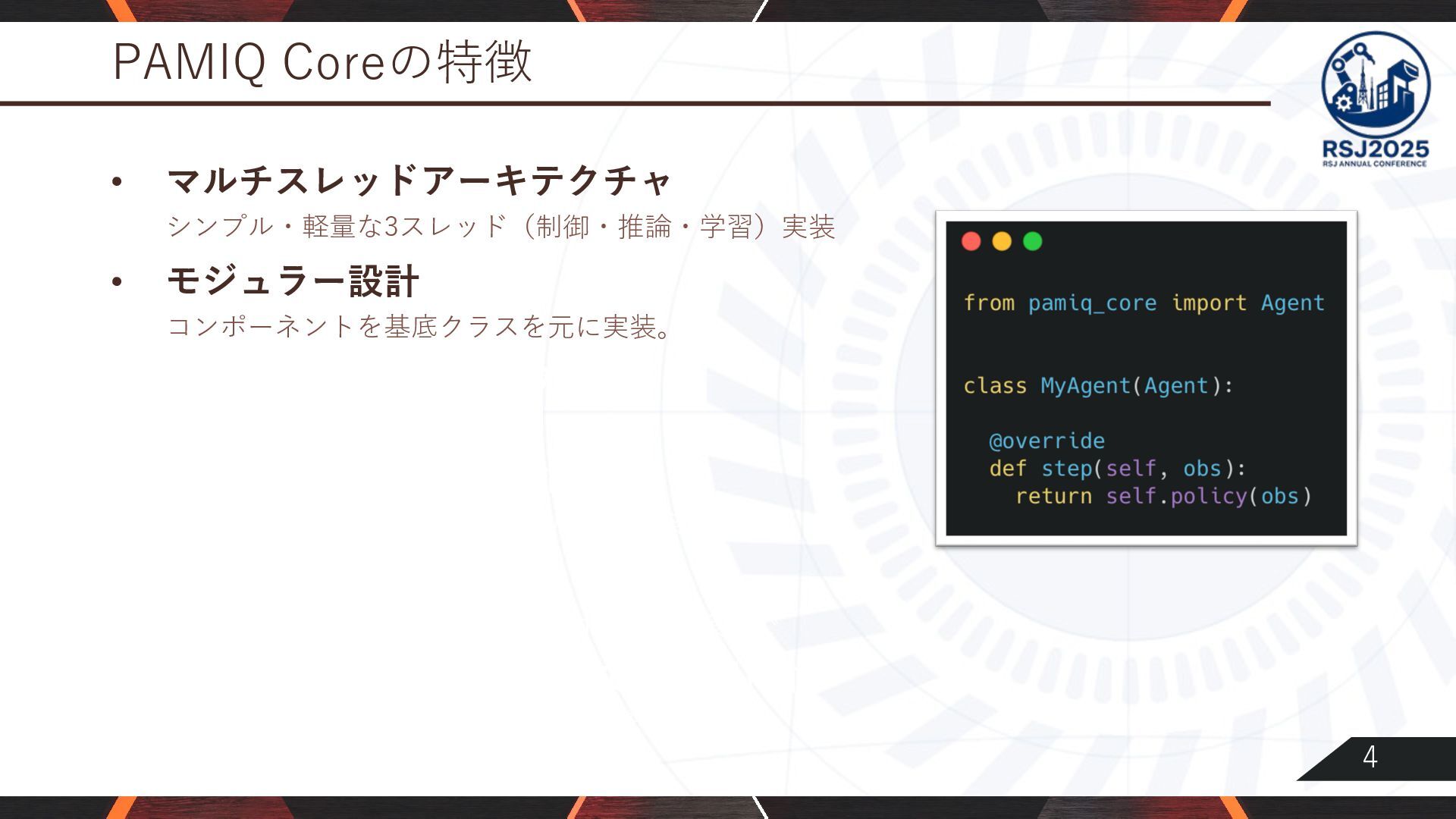
4 PAMIQ Coreの特徴 • マルチスレッドアーキテクチャ シンプル・軽量な3スレッド(制御・推論・学習)実装 • モジュラー設計 コンポーネントを基底クラスを元に実装。 •
既存フレームワークとの統合 PyTorch, Gymansium (OpenAI Gym) • 継続学習の運⽤⽀援機能 インタラクティブ制御コンソール、状態保存など • 段階的なサンプル 最⼩実装から実⽤サンプル、VRChatへの実装まで • “pip install pamiq-core” で即利⽤可能 Python Package Index (PyPI)へ公開済
5 PAMIQ Coreの特徴 • マルチスレッドアーキテクチャ シンプル・軽量な3スレッド(制御・推論・学習)実装 • モジュラー設計 コンポーネントを基底クラスを元に実装。 •
既存フレームワークとの統合 PyTorch, Gymansium (OpenAI Gym) • 継続学習の運⽤⽀援機能 インタラクティブ制御コンソール、状態保存など • 段階的なサンプル 最⼩実装から実⽤サンプル、VRChatへの実装まで • “pip install pamiq-core” で即利⽤可能 Python Package Index (PyPI)へ公開済 Gymnasium
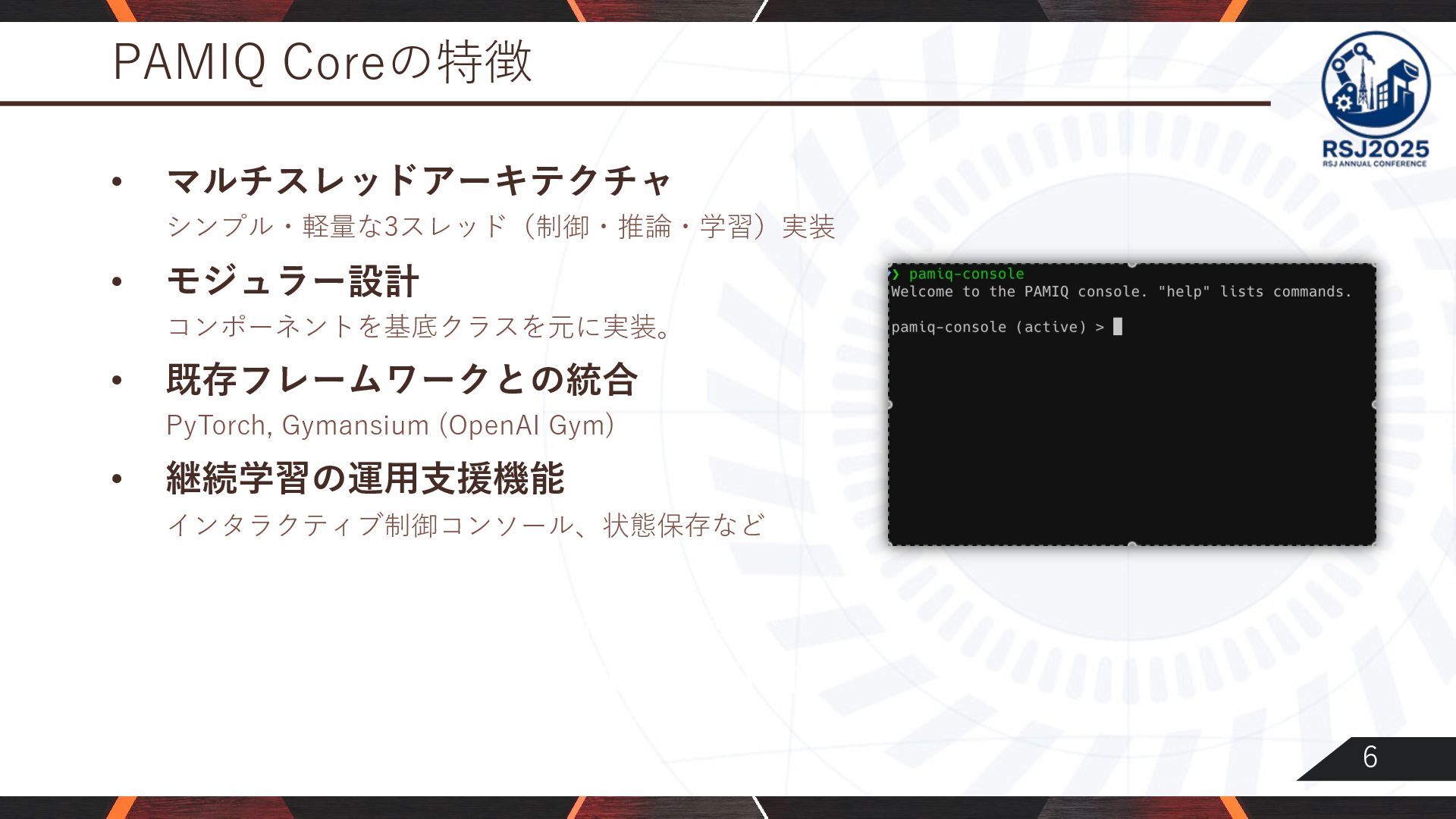
6 PAMIQ Coreの特徴 • マルチスレッドアーキテクチャ シンプル・軽量な3スレッド(制御・推論・学習)実装 • モジュラー設計 コンポーネントを基底クラスを元に実装。 •
既存フレームワークとの統合 PyTorch, Gymansium (OpenAI Gym) • 継続学習の運⽤⽀援機能 インタラクティブ制御コンソール、状態保存など • 段階的なサンプル 最⼩実装から実⽤サンプル、VRChatへの実装まで • “pip install pamiq-core” で即利⽤可能 Python Package Index (PyPI)へ公開済
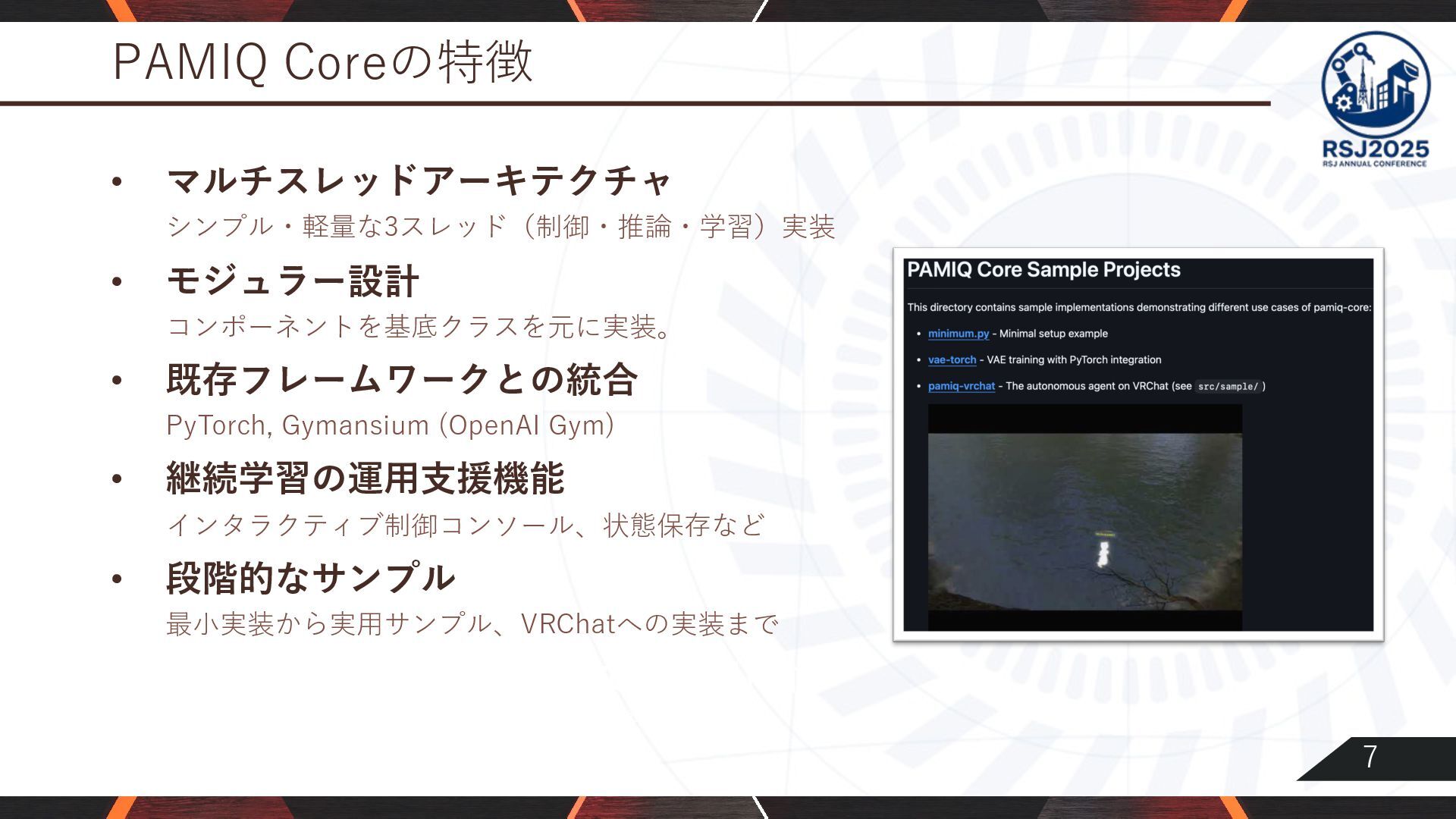
7 PAMIQ Coreの特徴 • マルチスレッドアーキテクチャ シンプル・軽量な3スレッド(制御・推論・学習)実装 • モジュラー設計 コンポーネントを基底クラスを元に実装。 •
既存フレームワークとの統合 PyTorch, Gymansium (OpenAI Gym) • 継続学習の運⽤⽀援機能 インタラクティブ制御コンソール、状態保存など • 段階的なサンプル 最⼩実装から実⽤サンプル、VRChatへの実装まで • “pip install pamiq-core” で即利⽤可能 Python Package Index (PyPI)へ公開済
8 PAMIQ Coreの特徴 • マルチスレッドアーキテクチャ シンプル・軽量な3スレッド(制御・推論・学習)実装 • モジュラー設計 コンポーネントを基底クラスを元に実装。 •
既存フレームワークとの統合 PyTorch, Gymansium (OpenAI Gym) • 継続学習の運⽤⽀援機能 インタラクティブ制御コンソール、状態保存など • 段階的なサンプル 最⼩実装から実⽤サンプル、VRChatへの実装まで • “pip install pamiq-core” で即利⽤可能 Python Package Index (PyPI)へ公開済
9 PAMIQ Coreの特徴 • マルチスレッドアーキテクチャ シンプル・軽量な3スレッド(制御・推論・学習)実装 • モジュラー設計 コンポーネントを基底クラスを元に実装。 •
既存フレームワークとの統合 PyTorch, Gymansium (OpenAI Gym) • 継続学習の運⽤⽀援機能 インタラクティブ制御コンソール、状態保存など • 段階的なサンプル 最⼩実装から実⽤サンプル、VRChatへの実装まで • “pip install pamiq-core” で即利⽤可能 Python Package Index (PyPI)へ公開済 詳細は論⽂要旨 ドキュメンテーションサイトへ https://mlshukai.github.io/pamiq-core/
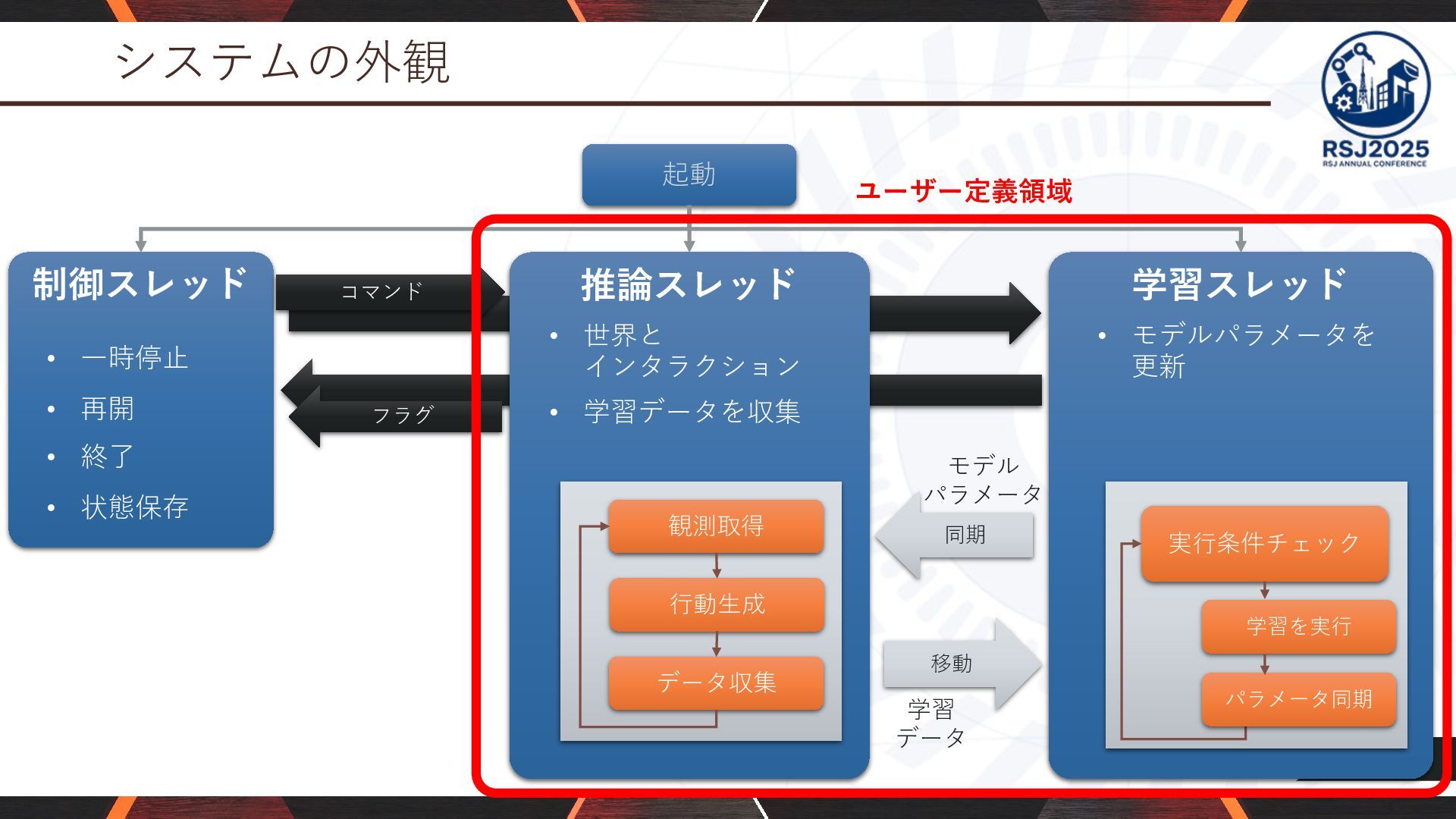
11 システムの外観 フラグ・命令 フラグ・命令 起動 推論スレッド 学習スレッド 制御スレッド • ⼀時停⽌
• 再開 • 終了 • 状態保存 • 世界と インタラクション • 学習データを収集 観測取得 ⾏動⽣成 データ収集 • モデルパラメータを 更新 実⾏条件チェック 学習を実⾏ パラメータ同期 移動 モデル パラメータ 学習 データ 同期 コマンド フラグ ユーザー定義領域
12 各コンポーネントについて
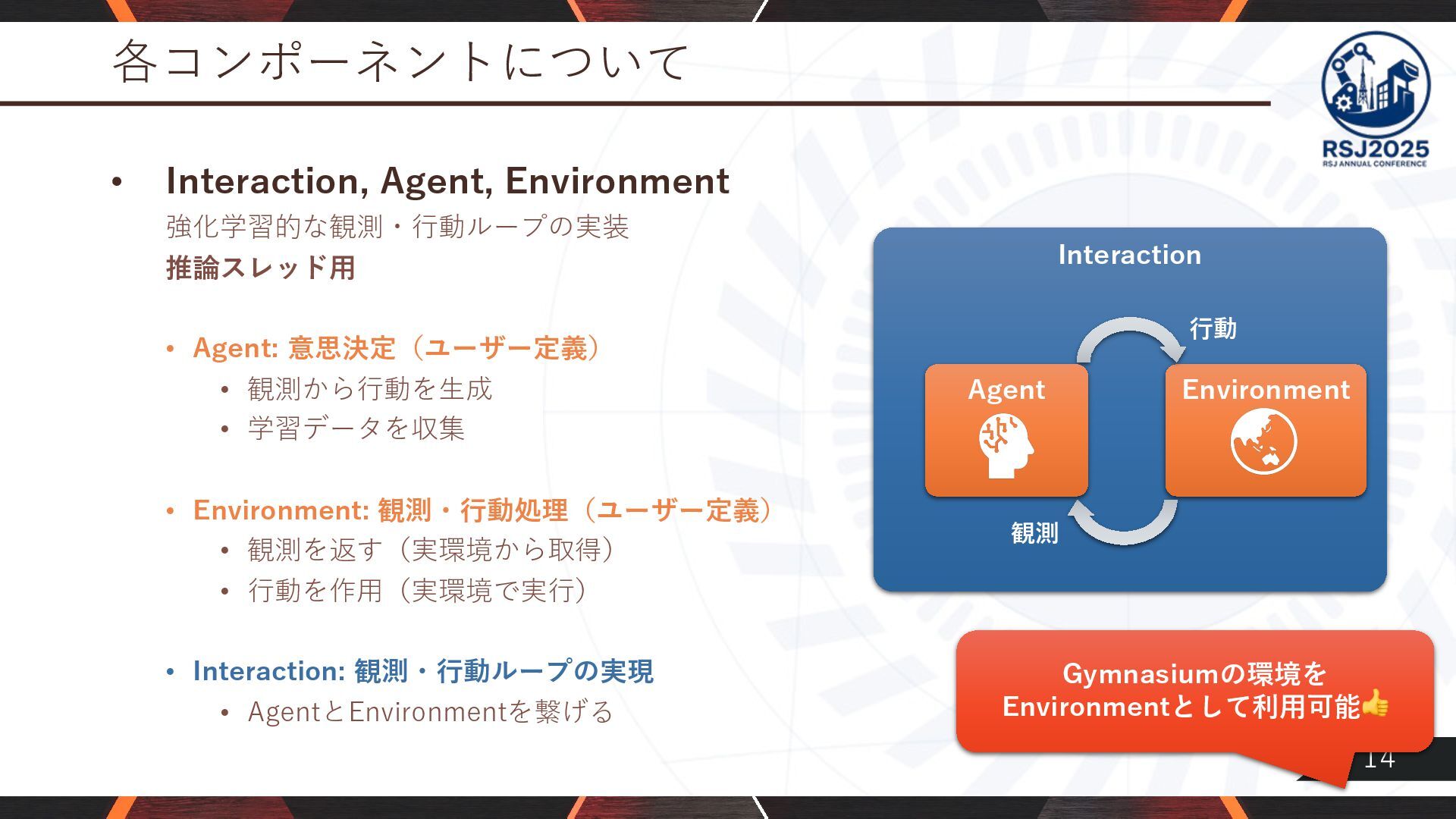
14 各コンポーネントについて • Interaction, Agent, Environment 強化学習的な観測・⾏動ループの実装 推論スレッド⽤ • Agent:
意思決定(ユーザー定義) • 観測から⾏動を⽣成 • 学習データを収集 • Environment: 観測・⾏動処理(ユーザー定義) • 観測を返す(実環境から取得) • ⾏動を作⽤(実環境で実⾏) • Interaction: 観測・⾏動ループの実現 • AgentとEnvironmentを繋げる Interaction Environment 観測 ⾏動 Agent Gymnasiumの環境を Environmentとして利⽤可能!
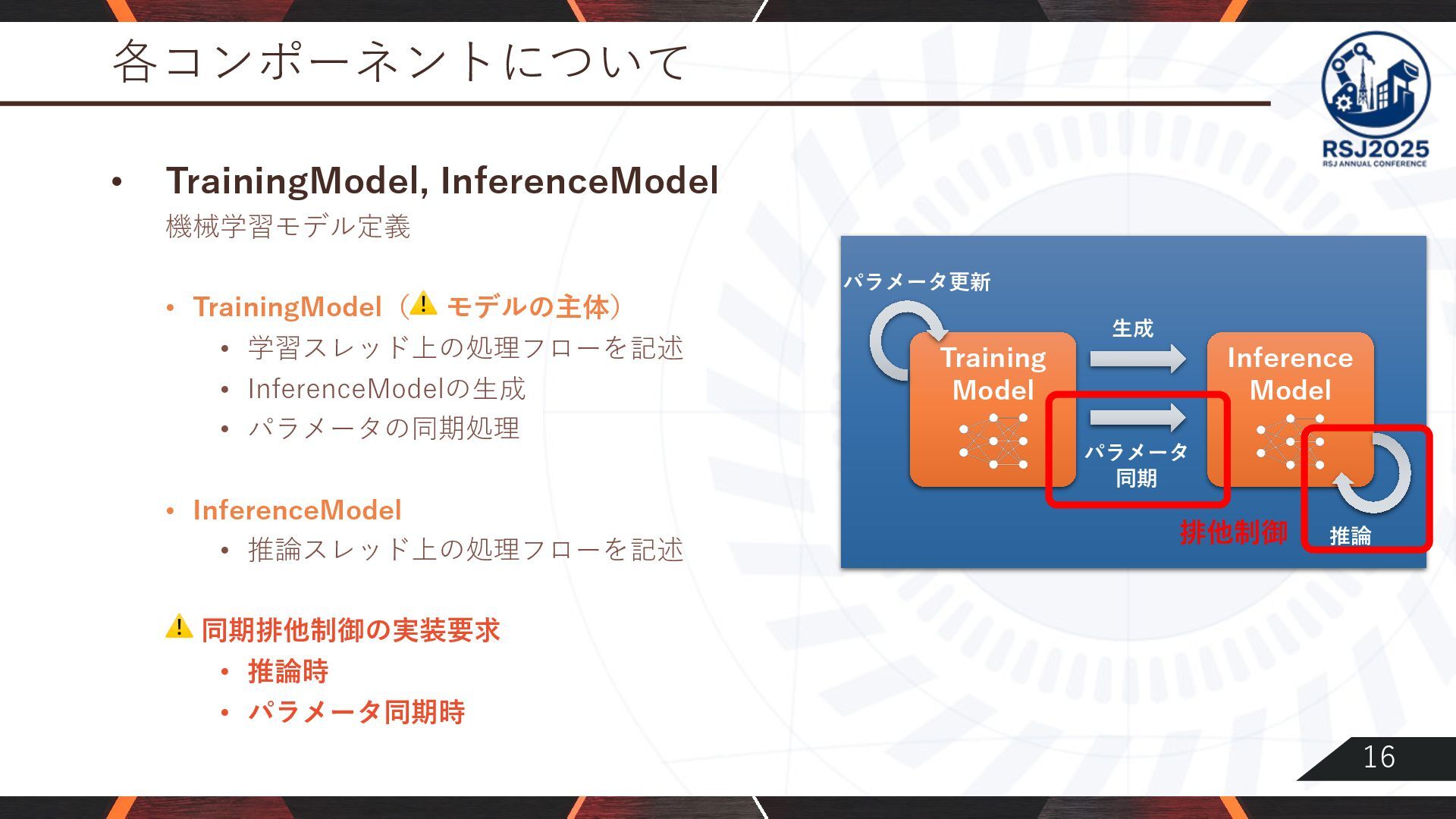
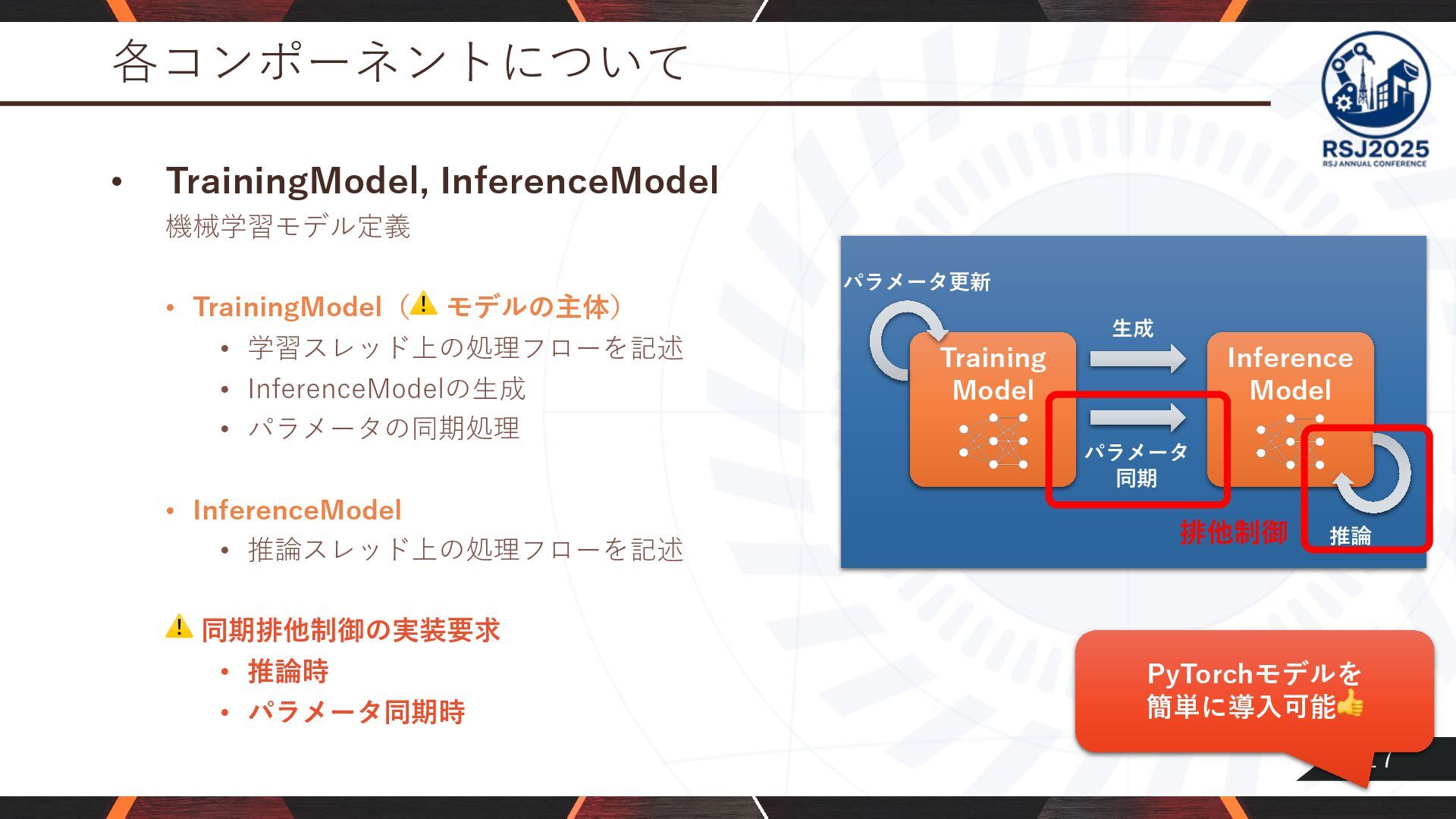
16 各コンポーネントについて • TrainingModel, InferenceModel 機械学習モデル定義 • TrainingModel(⚠ モデルの主体) •
学習スレッド上の処理フローを記述 • InferenceModelの⽣成 • パラメータの同期処理 • InferenceModel • 推論スレッド上の処理フローを記述 ⚠ 同期排他制御の実装要求 • 推論時 • パラメータ同期時 Training Model Inference Model ⽣成 パラメータ 同期 パラメータ更新 推論 排他制御
17 各コンポーネントについて • TrainingModel, InferenceModel 機械学習モデル定義 • TrainingModel(⚠ モデルの主体) •
学習スレッド上の処理フローを記述 • InferenceModelの⽣成 • パラメータの同期処理 • InferenceModel • 推論スレッド上の処理フローを記述 ⚠ 同期排他制御の実装要求 • 推論時 • パラメータ同期時 Training Model Inference Model ⽣成 パラメータ 同期 パラメータ更新 推論 PyTorchモデルを 簡単に導⼊可能! 排他制御
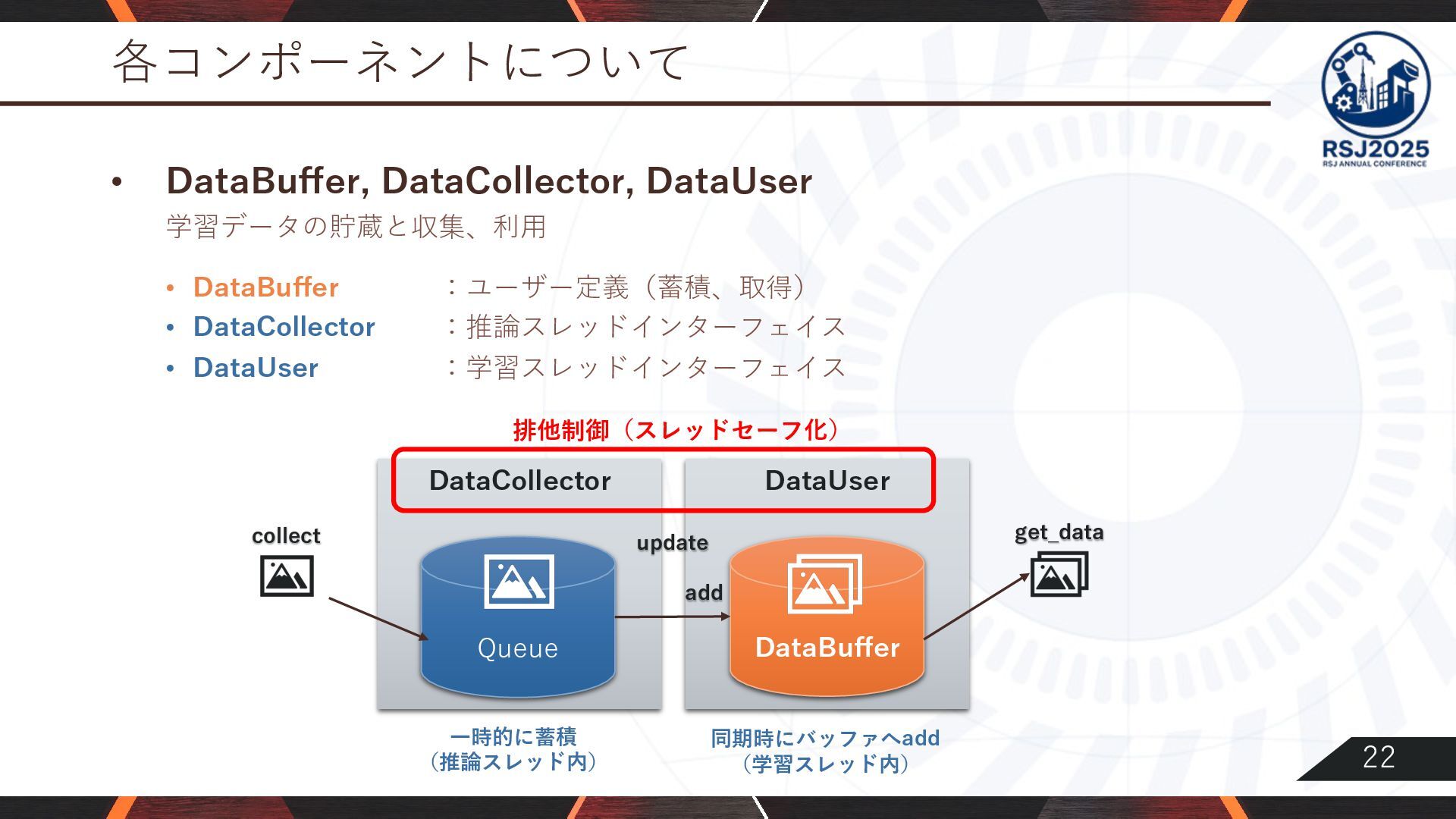
22 各コンポーネントについて • DataBuffer, DataCollector, DataUser 学習データの貯蔵と収集、利⽤ • DataBuffer :ユーザー定義(蓄積、取得)
• DataCollector :推論スレッドインターフェイス • DataUser :学習スレッドインターフェイス DataCollector DataUser Queue DataBuffer update add ⼀時的に蓄積 (推論スレッド内) 同期時にバッファへadd (学習スレッド内) get_data collect 排他制御(スレッドセーフ化)
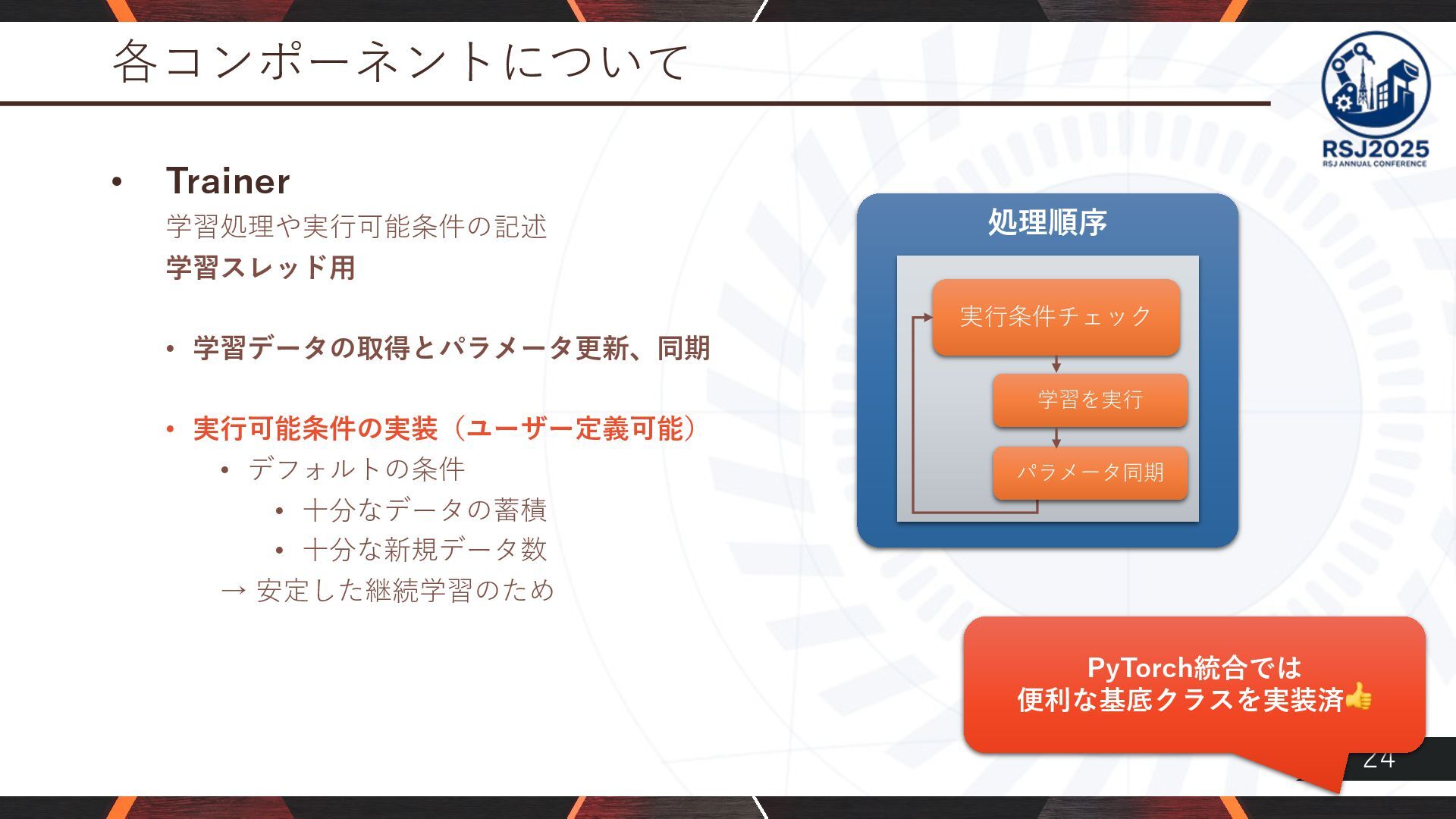
24 各コンポーネントについて • Trainer 学習処理や実⾏可能条件の記述 学習スレッド⽤ • 学習データの取得とパラメータ更新、同期 • 実⾏可能条件の実装(ユーザー定義可能)
• デフォルトの条件 • ⼗分なデータの蓄積 • ⼗分な新規データ数 → 安定した継続学習のため 処理順序 PyTorch統合では 便利な基底クラスを実装済! 実⾏条件チェック 学習を実⾏ パラメータ同期
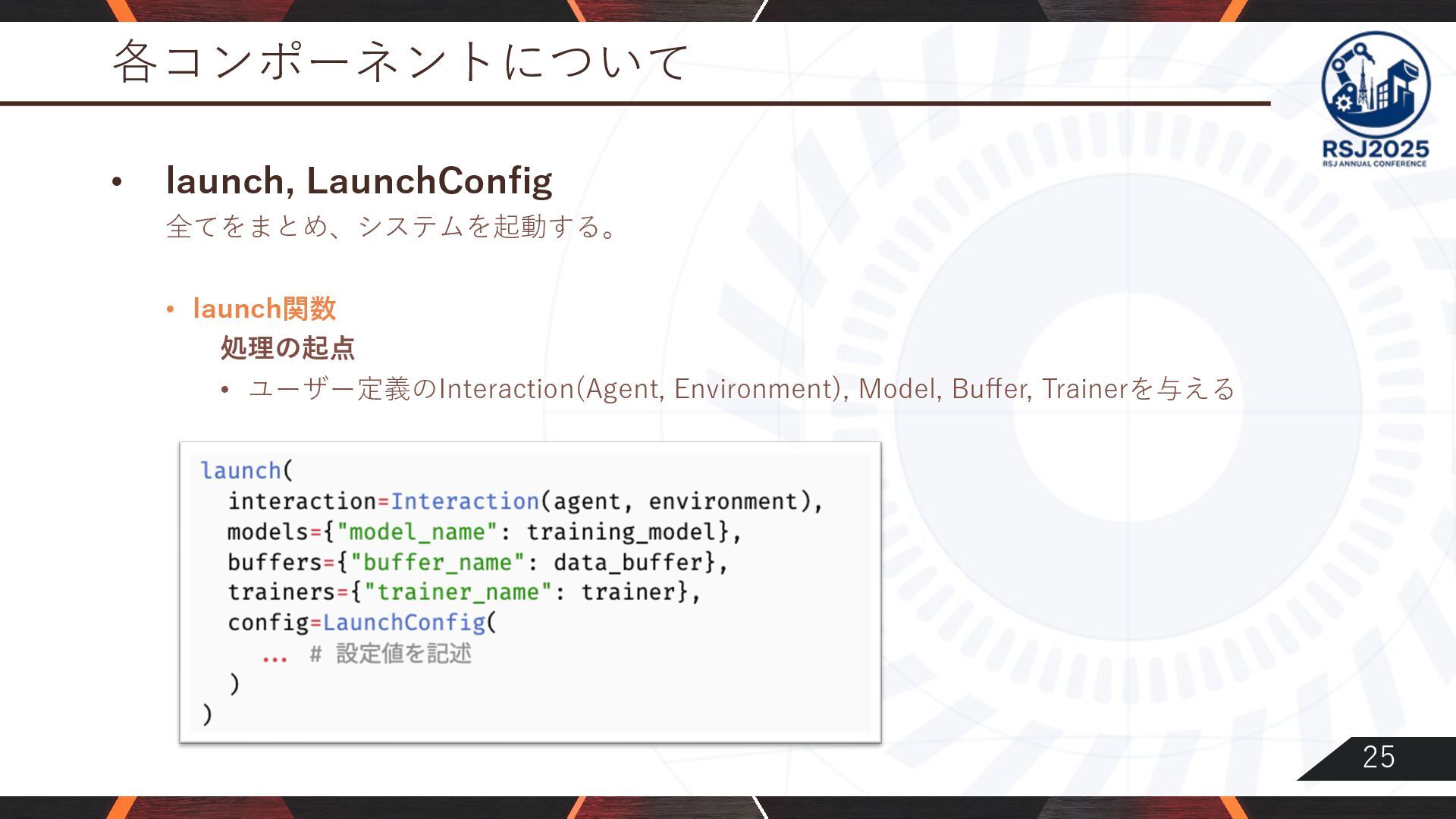
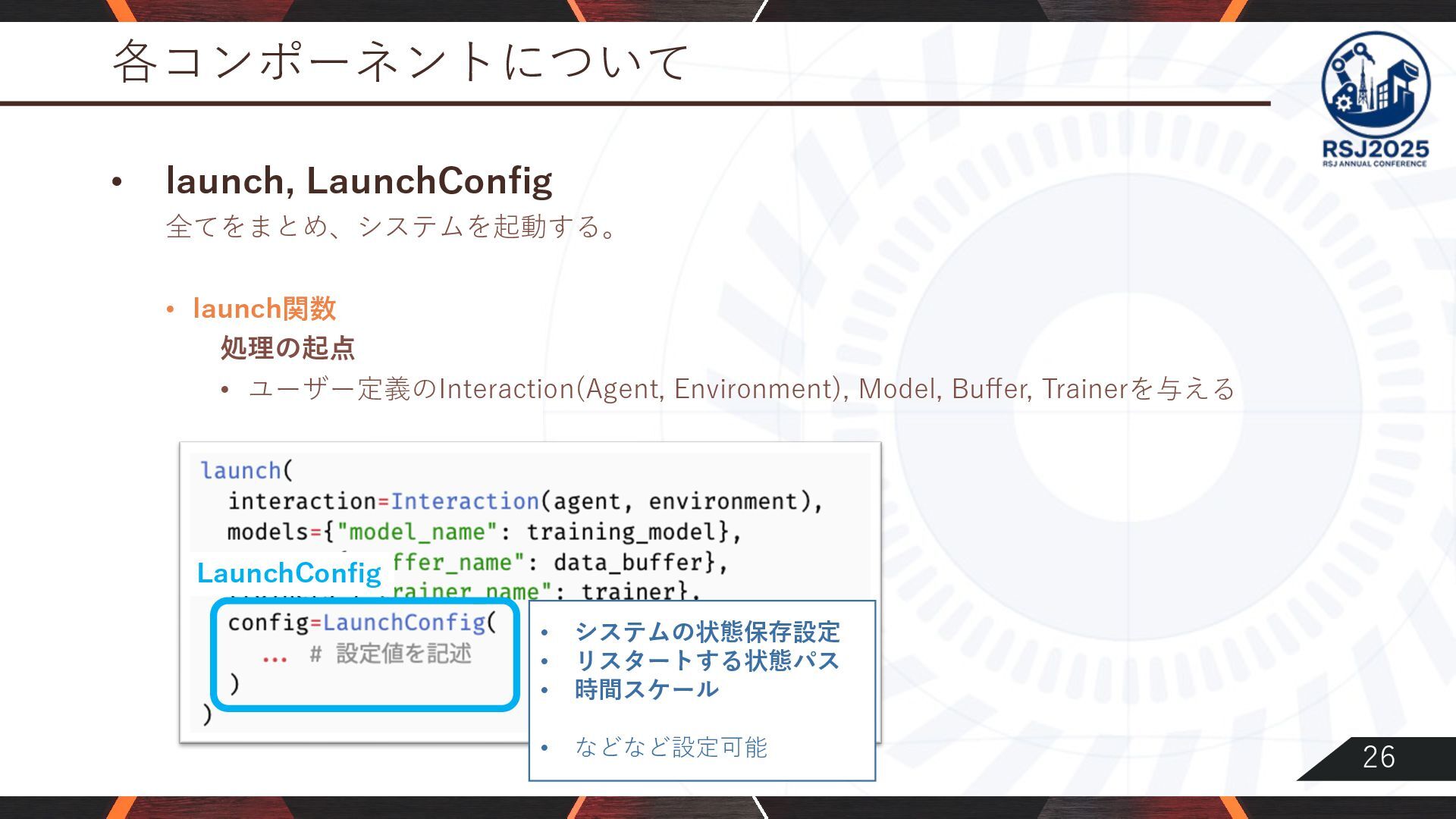
25 各コンポーネントについて • launch, LaunchConfig 全てをまとめ、システムを起動する。 • launch関数 処理の起点 •
ユーザー定義のInteraction(Agent, Environment), Model, Buffer, Trainerを与える
26 各コンポーネントについて • launch, LaunchConfig 全てをまとめ、システムを起動する。 • launch関数 処理の起点 •
ユーザー定義のInteraction(Agent, Environment), Model, Buffer, Trainerを与える • システムの状態保存設定 • リスタートする状態パス • 時間スケール • などなど設定可能 LaunchConfig
27 同期システムについて
28 同期システム • 設計哲学 絶対に推論処理を⽌めない リアルタイム処理の実現
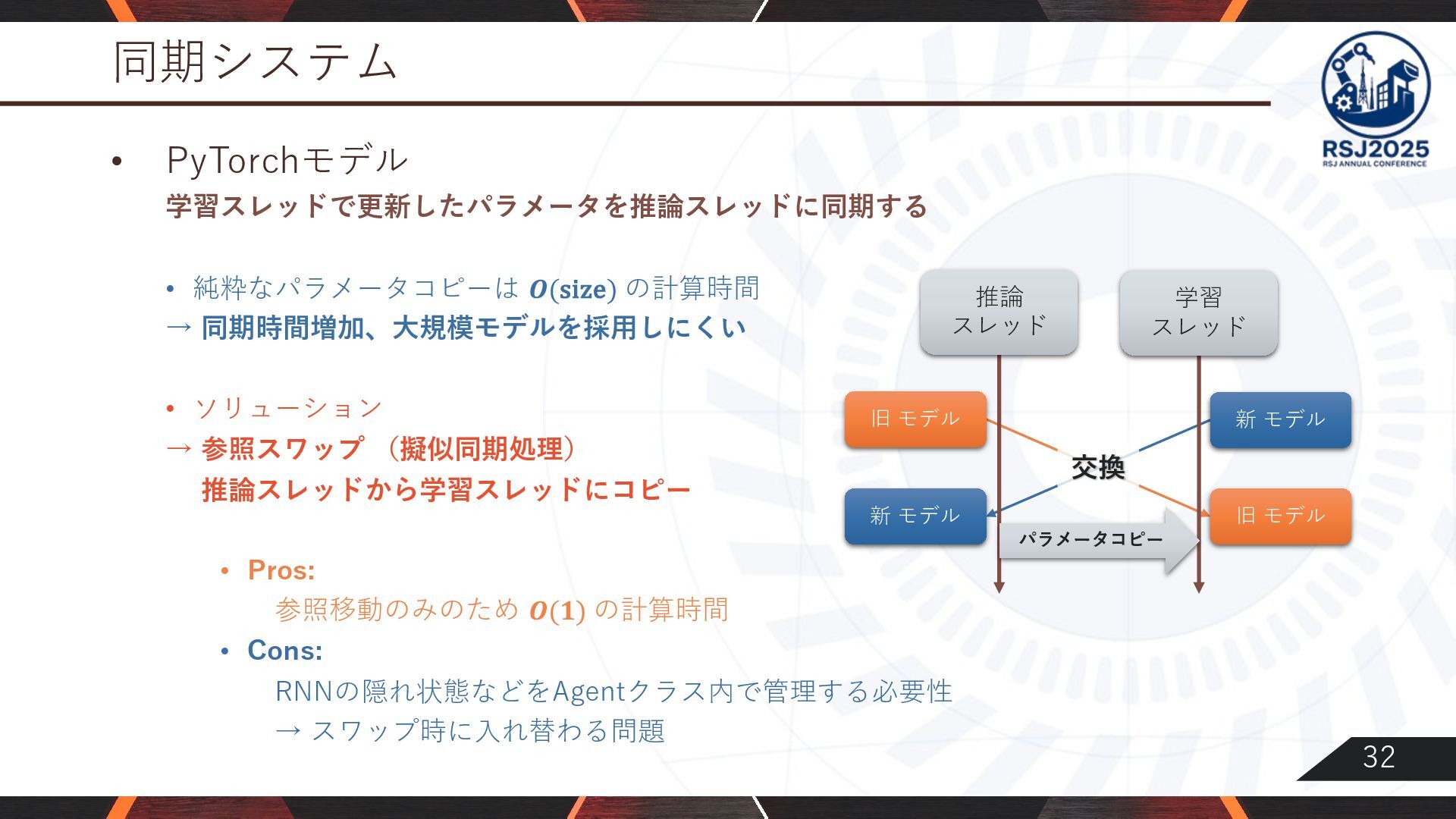
32 同期システム • PyTorchモデル 学習スレッドで更新したパラメータを推論スレッドに同期する • 純粋なパラメータコピーは !(size) の計算時間 →
同期時間増加、⼤規模モデルを採⽤しにくい • ソリューション → 参照スワップ (擬似同期処理) 推論スレッドから学習スレッドにコピー • Pros: 参照移動のみのため !(() の計算時間 • Cons: RNNの隠れ状態などをAgentクラス内で管理する必要性 → スワップ時に⼊れ替わる問題 交換 旧 モデル 新 モデル 新 モデル 旧 モデル パラメータコピー 推論 スレッド 学習 スレッド
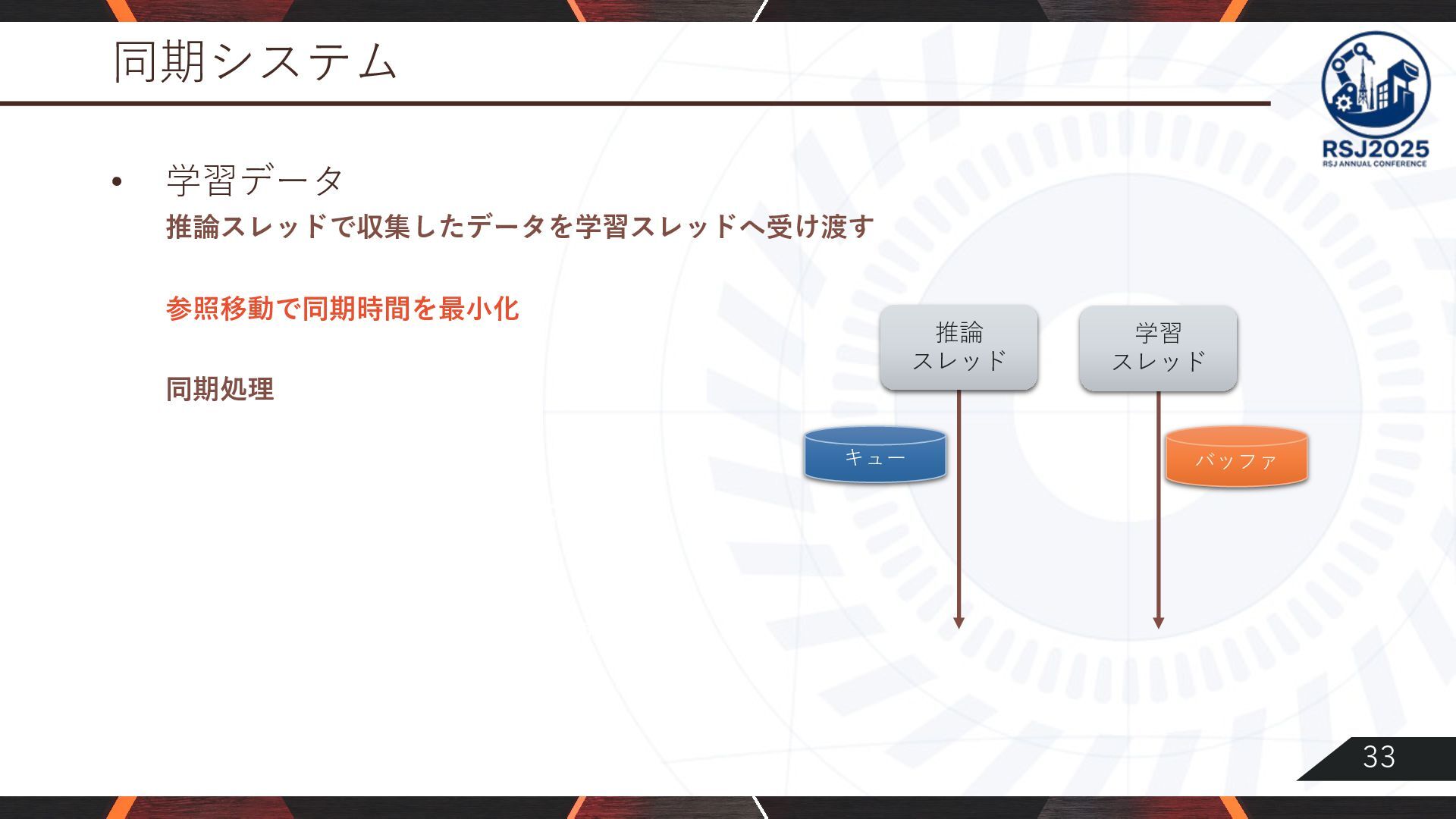
33 同期システム • 学習データ 推論スレッドで収集したデータを学習スレッドへ受け渡す 参照移動で同期時間を最⼩化 同期処理 1. キューを新規⽣成 2.
既存キューと置換 3. キューオブジェクトごと移動 • Cons: キューのサイズを事前に設定する必要性 (オーバーフロー対策) キュー 推論 スレッド 学習 スレッド バッファ
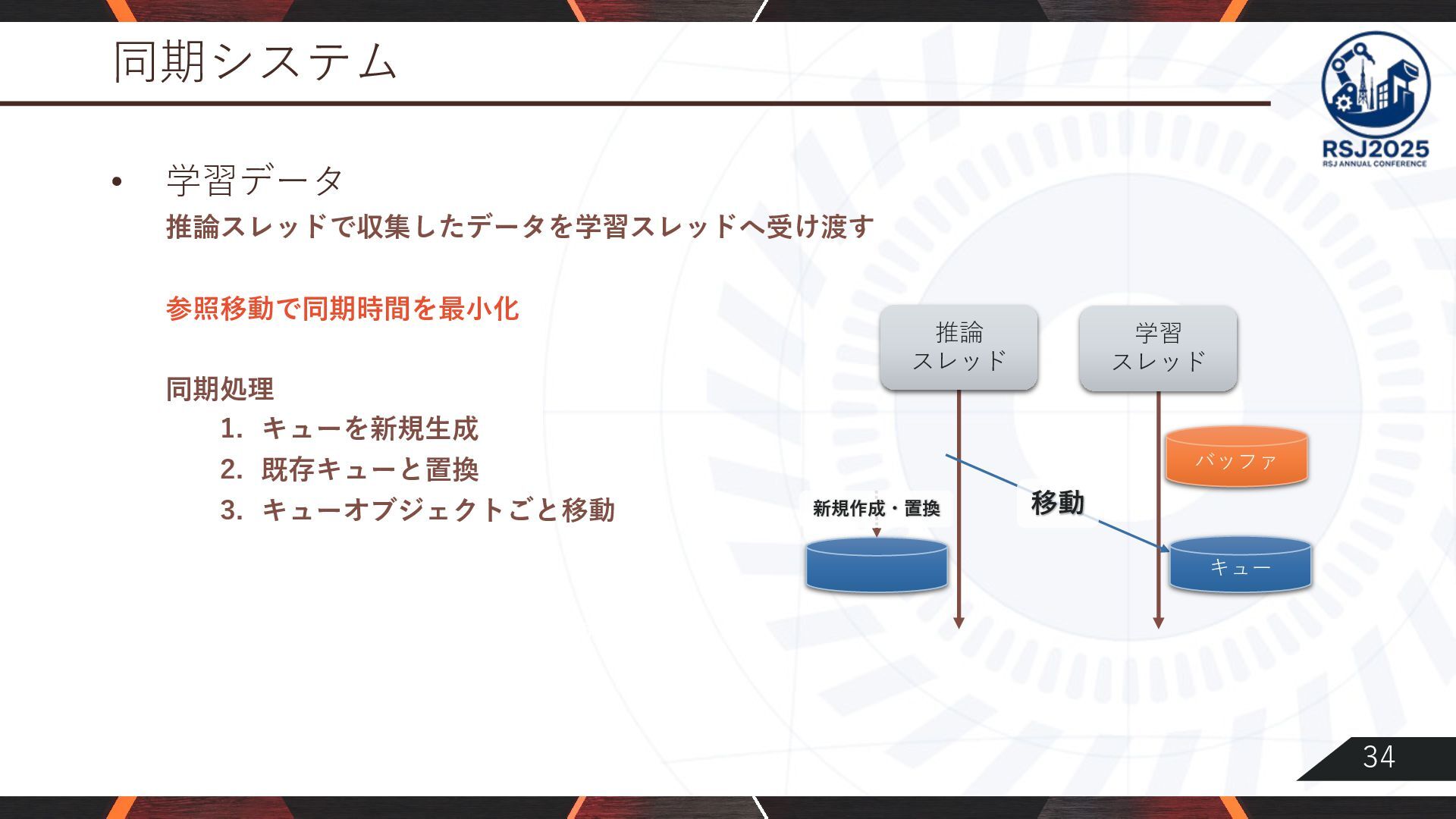
34 同期システム • 学習データ 推論スレッドで収集したデータを学習スレッドへ受け渡す 参照移動で同期時間を最⼩化 同期処理 1. キューを新規⽣成 2.
既存キューと置換 3. キューオブジェクトごと移動 • Cons: キューのサイズを事前に設定する必要性 (オーバーフロー対策) 推論 スレッド 学習 スレッド バッファ 移動 キュー 新規作成・置換
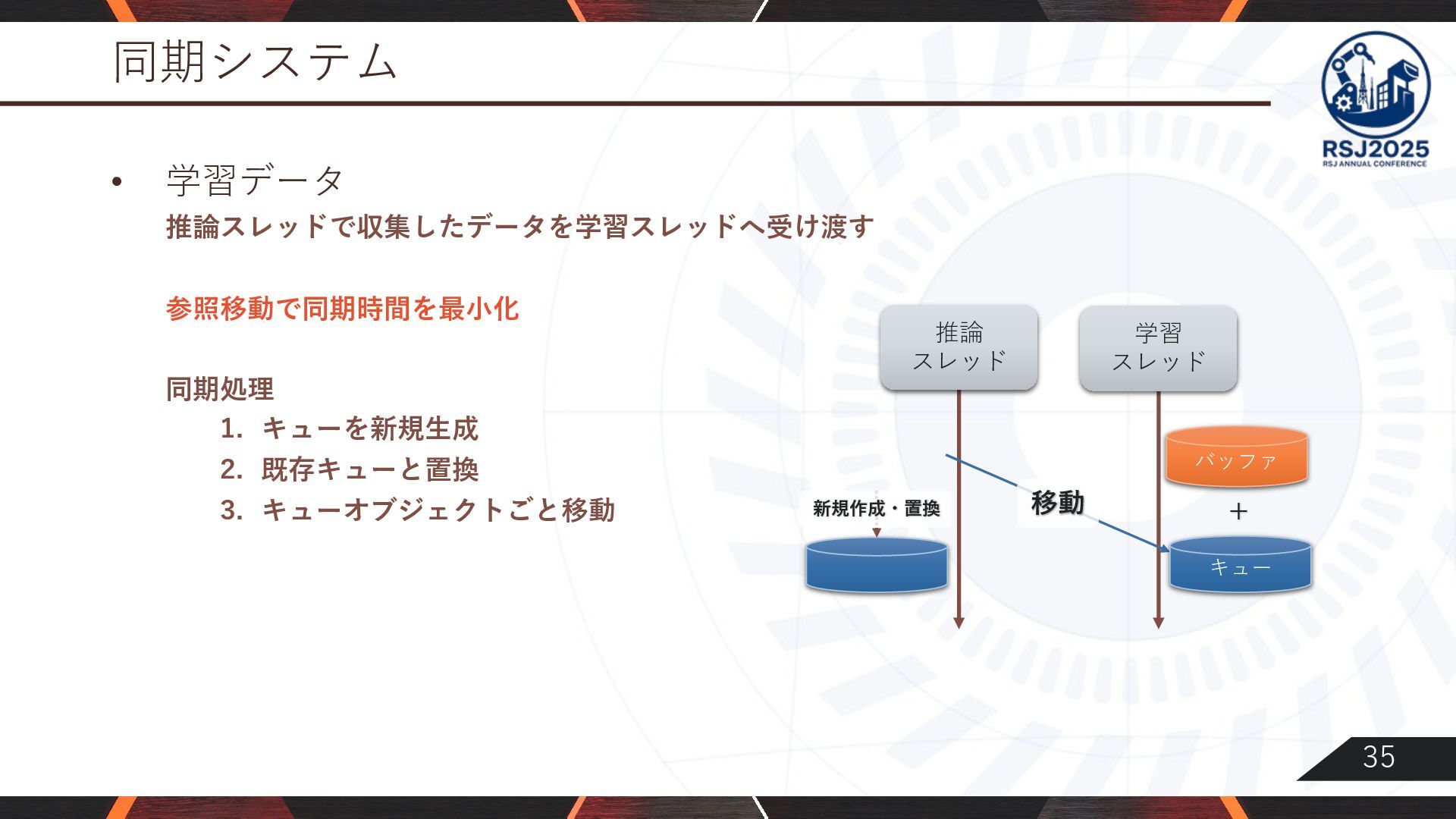
35 同期システム • 学習データ 推論スレッドで収集したデータを学習スレッドへ受け渡す 参照移動で同期時間を最⼩化 同期処理 1. キューを新規⽣成 2.
既存キューと置換 3. キューオブジェクトごと移動 • Cons: キューのサイズを事前に設定する必要性 (オーバーフロー対策) 推論 スレッド 学習 スレッド バッファ 移動 キュー 新規作成・置換 +
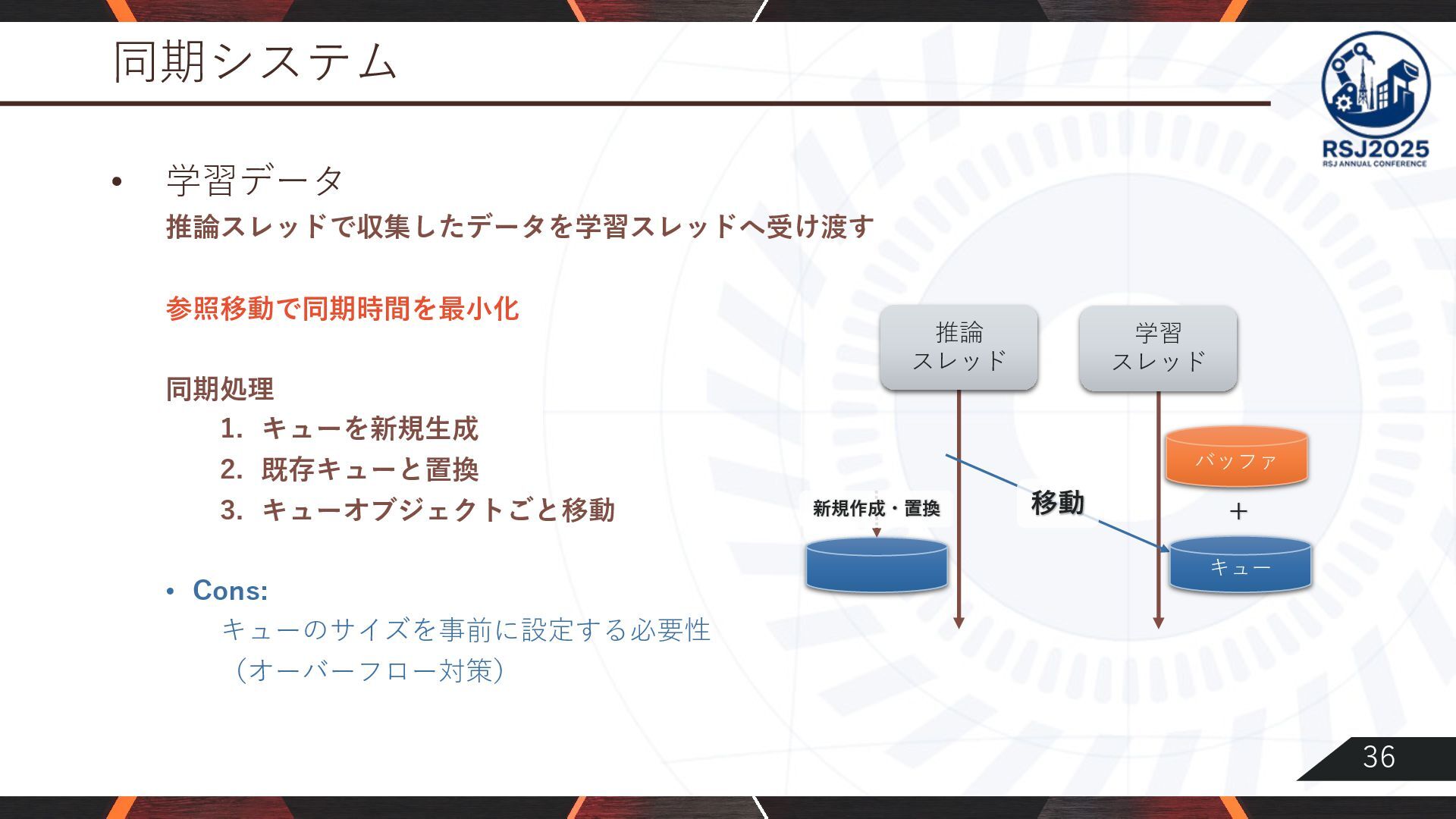
36 同期システム • 学習データ 推論スレッドで収集したデータを学習スレッドへ受け渡す 参照移動で同期時間を最⼩化 同期処理 1. キューを新規⽣成 2.
既存キューと置換 3. キューオブジェクトごと移動 • Cons: キューのサイズを事前に設定する必要性 (オーバーフロー対策) 推論 スレッド 学習 スレッド バッファ 移動 キュー 新規作成・置換 +
37 サンプル実装について • 段階的な3つのサンプル(リンクは要旨に記載) • “minimum.py” 最⼩限の起動処理のみ記述。 フレームワークのスタート地点 • “vae-torch”
Variational AutoEncoder の継続学習例を実装 PyTorch統合の実践的なサンプル • “pamiq-vrchat” 仮想世界 VRChat への実装サンプル より複雑的な応⽤例
None
39 より深くPAMIQ Coreを知りたい⼈のために • 9/6(⼟) 21:00 より、YouTube配信! VTuberのアイシア・ソリッドさんと! • より深い、開発のアレコレや⾃律機械知能PAMIQについ
てもお話しします。 公式チャンネル
40 より深くPAMIQ Coreを知りたい⼈のために • 質問・ご感想は⼤歓迎! • なんでスレッドベース? • 他のフレームワークとの統合は? •
類似アプローチってないの? • 今後の展望は…? • そもそもPAMIQとは…? • 発表後、ぜひお話ししましょ〜! PAMIQ Core 公式リポジトリ
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}