Share
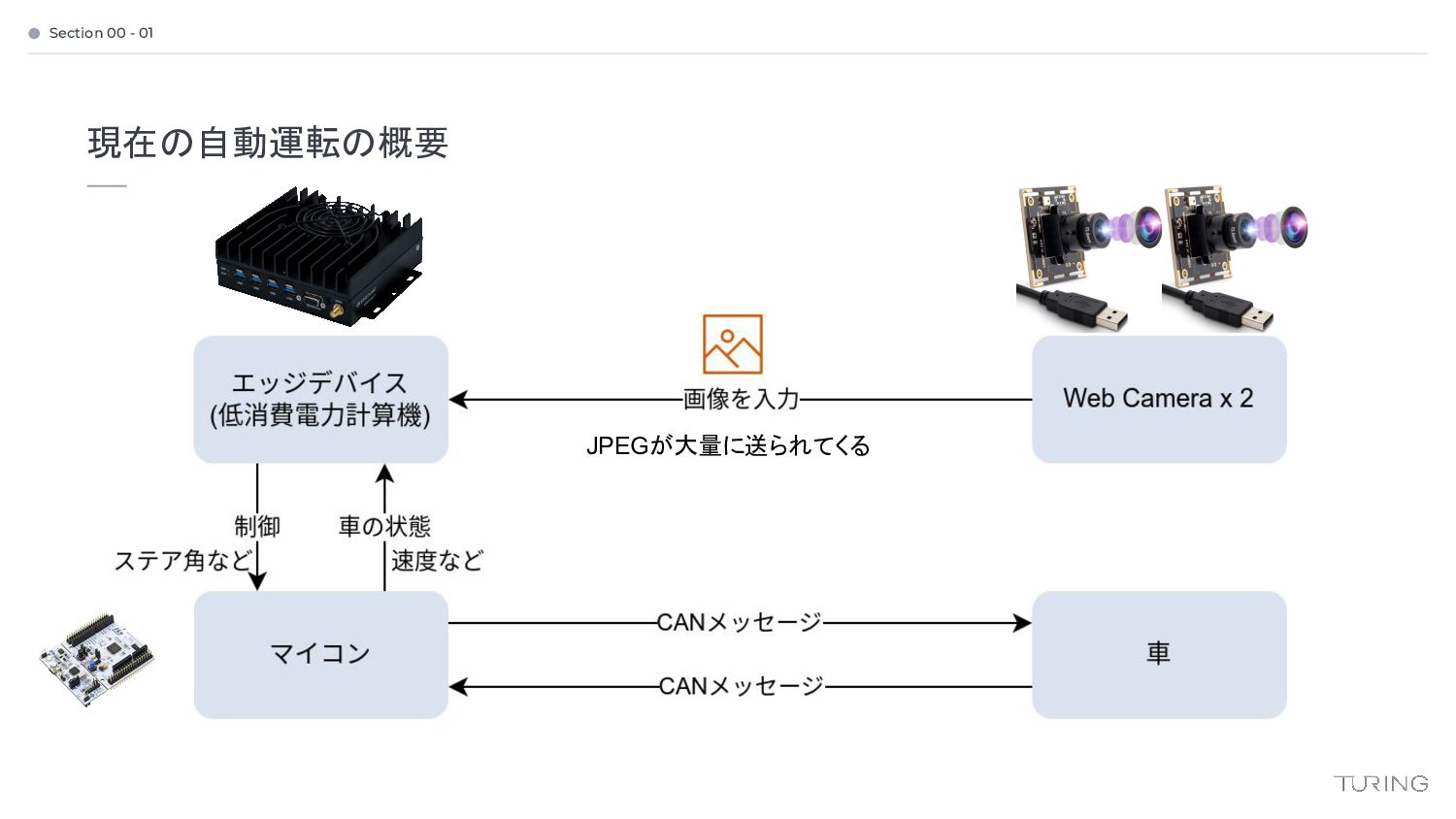
TURINGではEdgeplanT1(JetsonTX2)を用いた自動運転システムの実装を行いました。その過程で推論周りのボトルネックを解消した話をしました。 https://www.youtube.com/watch?v=nMcfN-JH048
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}