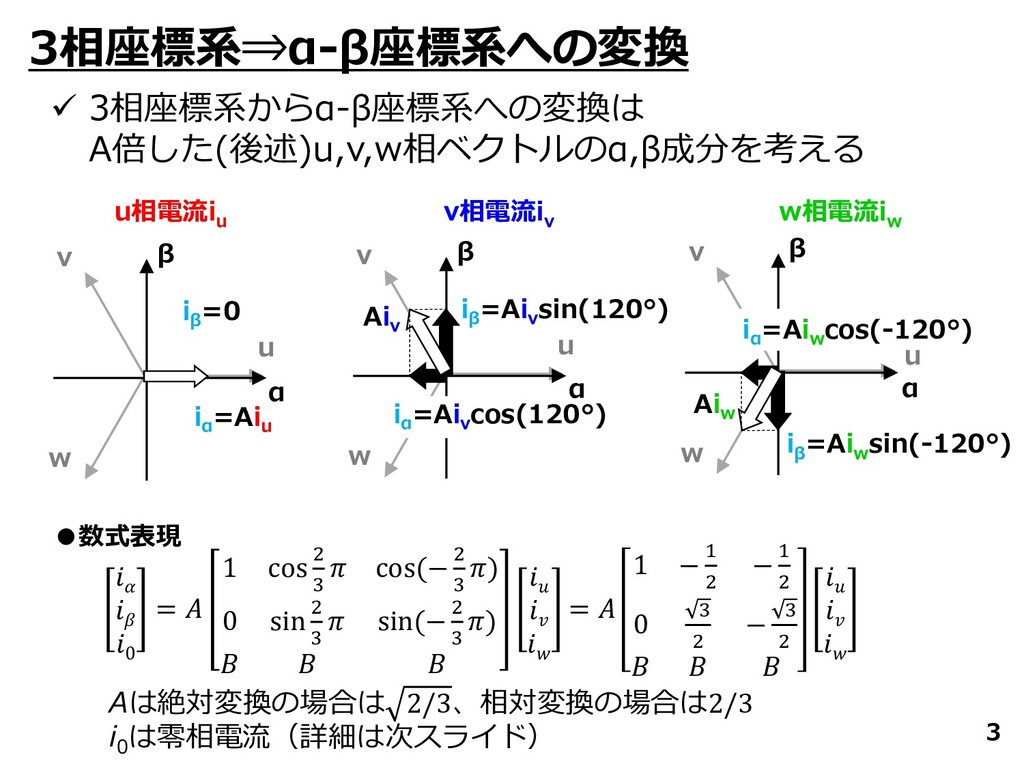
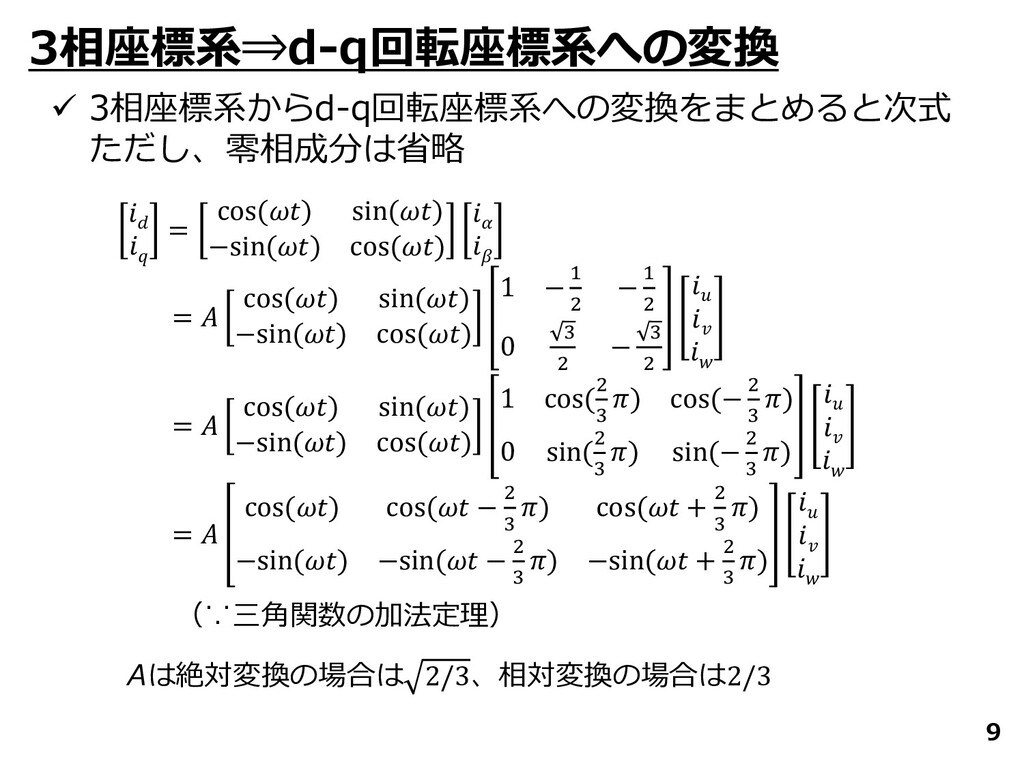
3 cos(− 2 3 ) 0 sin 2 3 sin(− 2 3 ) = 1 − 1 2 − 1 2 0 3 2 − 3 2 •数式表現 Aは絶対変換の場合は 2/3、相対変換の場合は2/3 i 0 は零相電流(詳細は次スライド) α β u v w i β =0 i α =Ai u α β u v w i α =Ai v cos(120°) i β =Ai v sin(120°) Ai v α β u v w i α =Ai w cos(-120°) i β =Ai w sin(-120°) u相電流i u v相電流i v w相電流i w Ai w
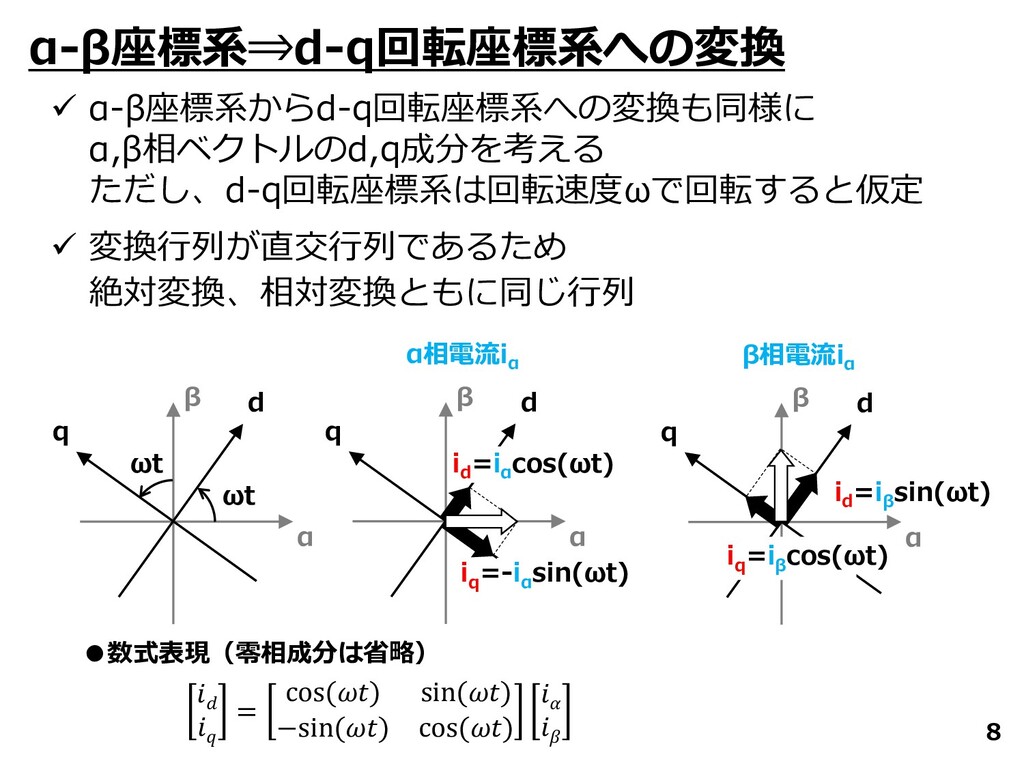
cos() sin() −sin() cos() •数式表現(零相成分は省略) d α β q ωt ωt α相電流i α d α β q i d =i α cos(ωt) i q =-i α sin(ωt) β相電流i α d α β q i d =i β sin(ωt) i q =i β cos(ωt)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}