civil aeronautics academy Began in 2003 Support various hardware RT Paparazzi: ChibiOS/RT(rt_paparazzi branch) Short video about open uav: http://youtu.be/IePG2fzKvF0
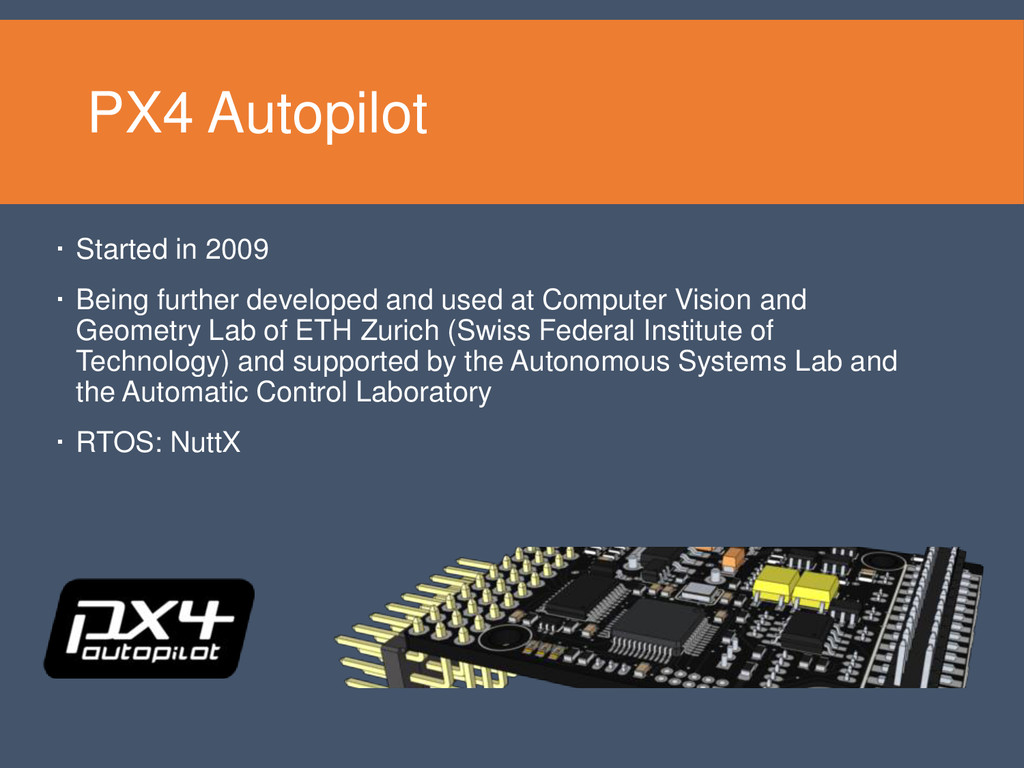
and used at Computer Vision and Geometry Lab of ETH Zurich (Swiss Federal Institute of Technology) and supported by the Autonomous Systems Lab and the Automatic Control Laboratory RTOS: NuttX
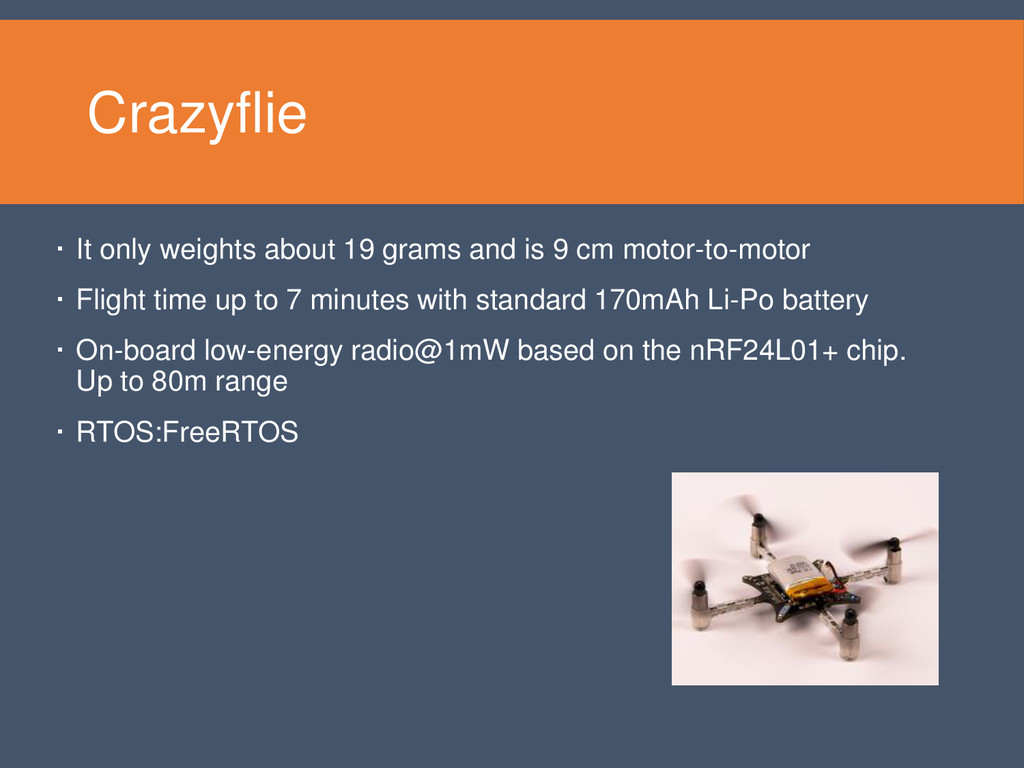
9 cm motor-to-motor Flight time up to 7 minutes with standard 170mAh Li-Po battery On-board low-energy radio@1mW based on the nRF24L01+ chip. Up to 80m range RTOS:FreeRTOS
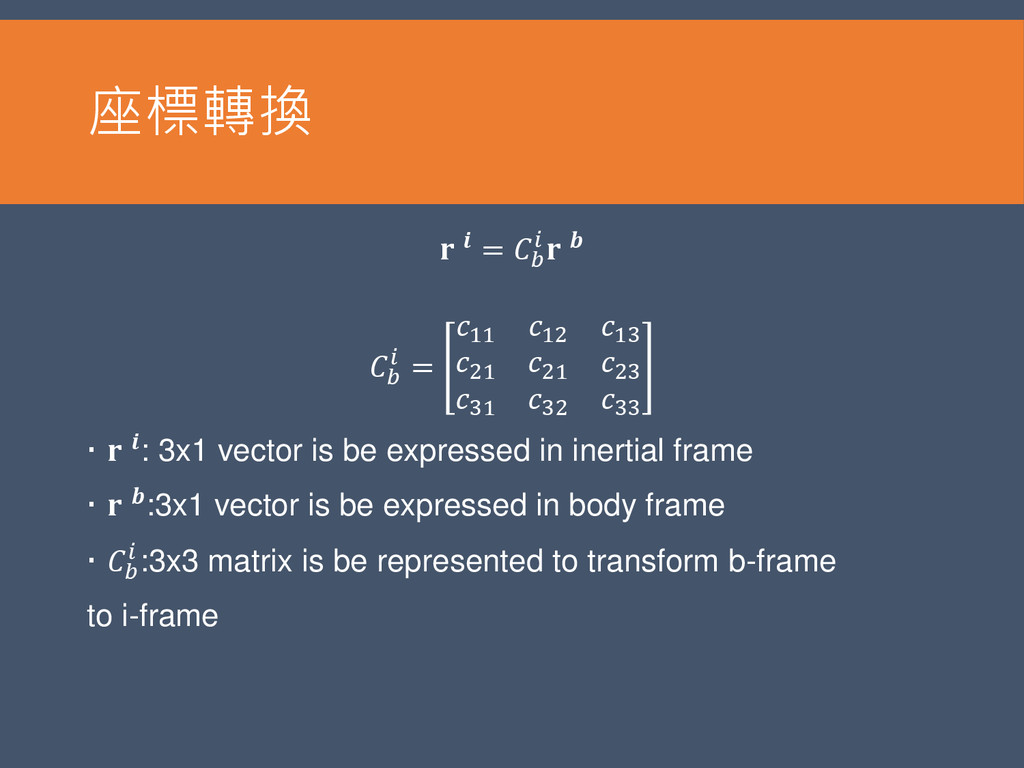
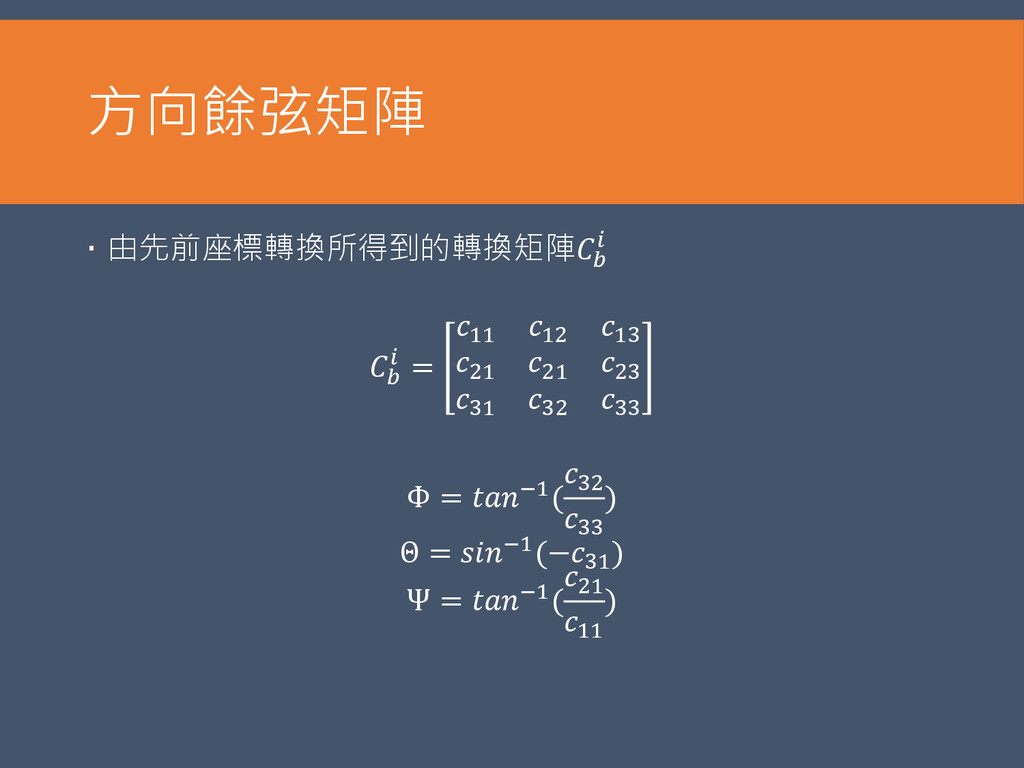
32 33 : 3x1 vector is be expressed in inertial frame :3x1 vector is be expressed in body frame :3x3 matrix is be represented to transform b-frame to i-frame
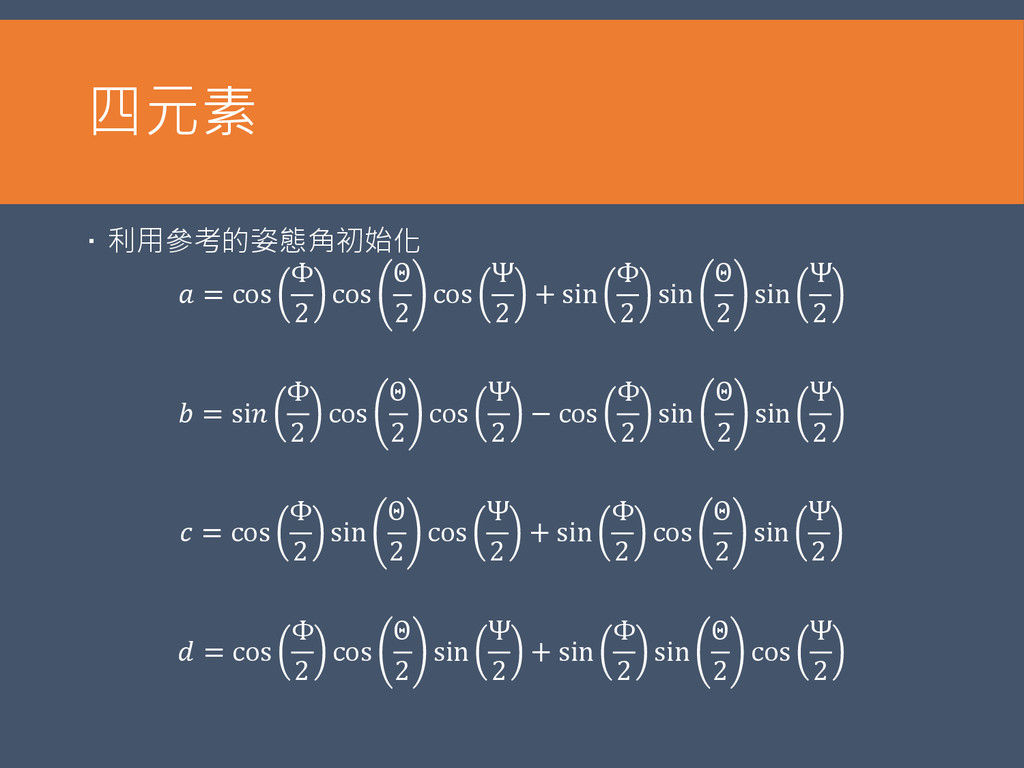
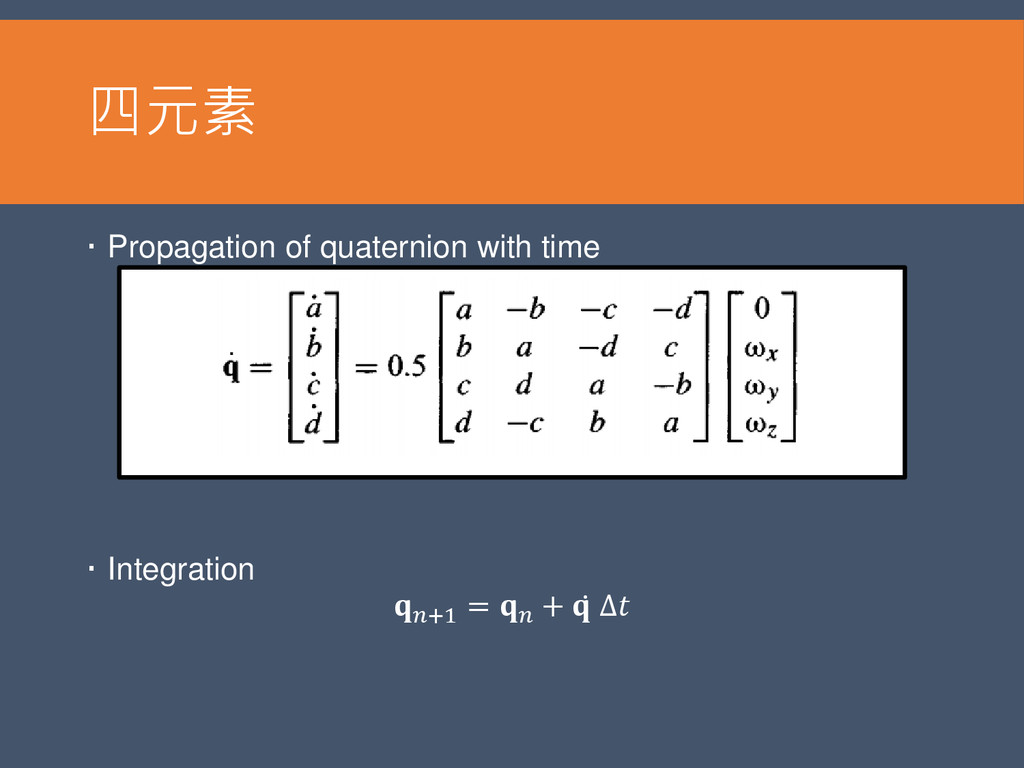
cos Ψ 2 + sin Φ 2 sin Θ 2 sin Ψ 2 = si Φ 2 cos Θ 2 cos Ψ 2 − cos Φ 2 sin Θ 2 sin Ψ 2 = cos Φ 2 sin Θ 2 cos Ψ 2 + sin Φ 2 cos Θ 2 sin Ψ 2 = cos Φ 2 cos Θ 2 sin Ψ 2 + sin Φ 2 sin Θ 2 cos Ψ 2
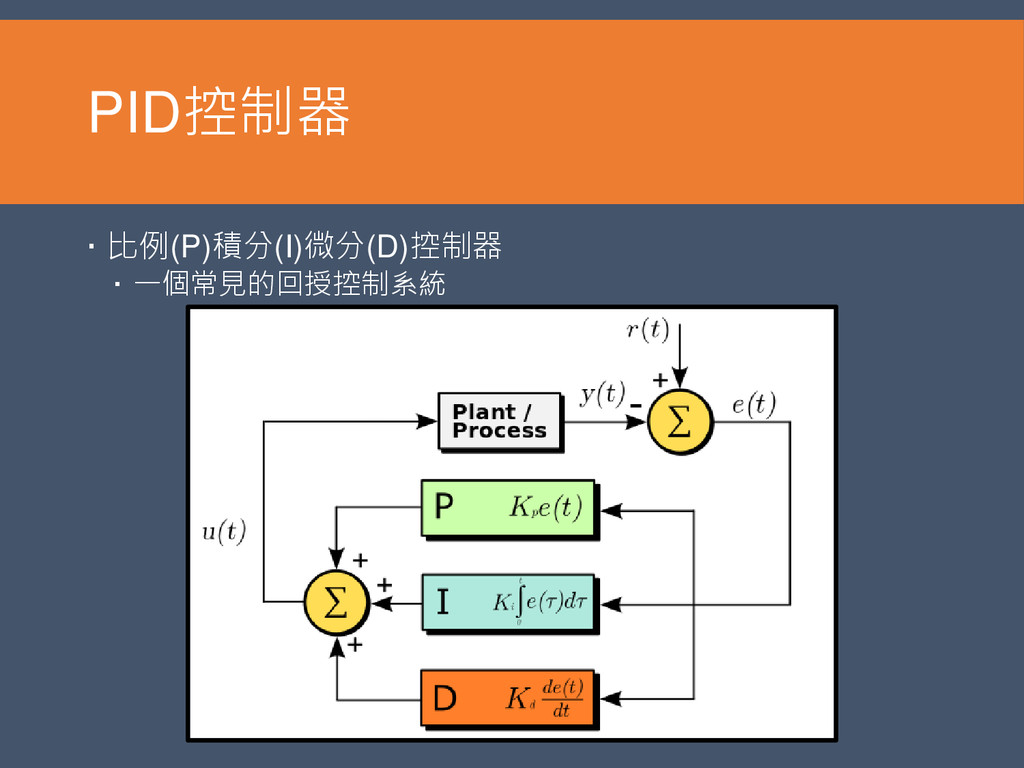
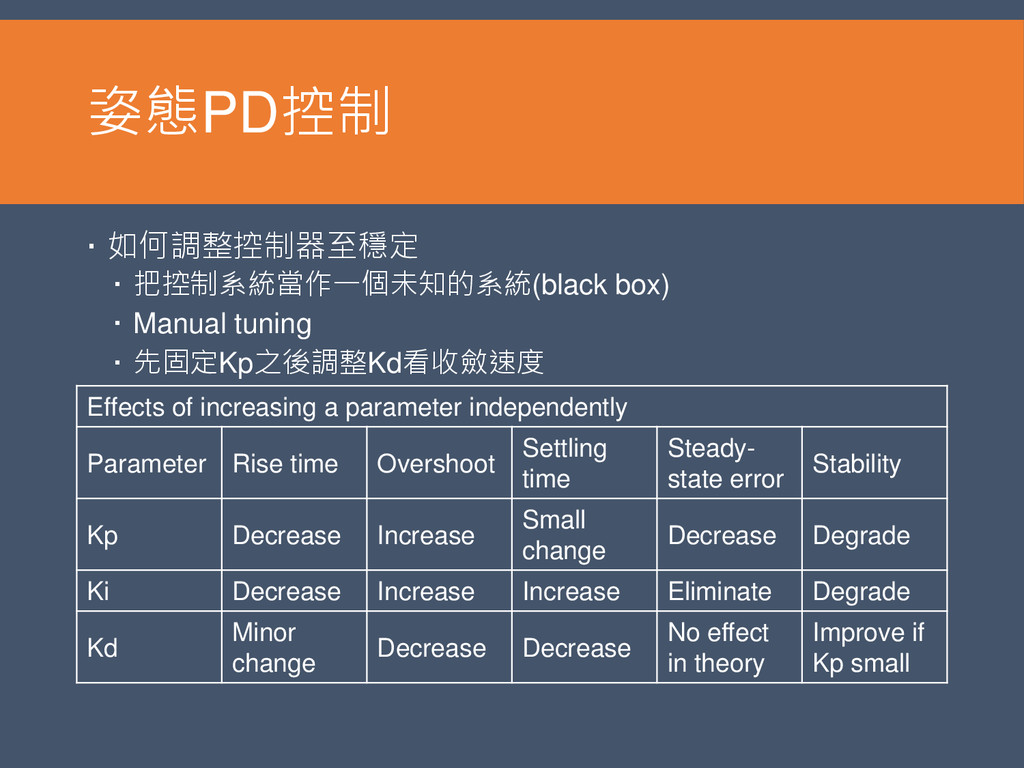
先固定Kp之後調整Kd看收斂速度 Effects of increasing a parameter independently Parameter Rise time Overshoot Settling time Steady- state error Stability Kp Decrease Increase Small change Decrease Degrade Ki Decrease Increase Increase Eliminate Degrade Kd Minor change Decrease Decrease No effect in theory Improve if Kp small
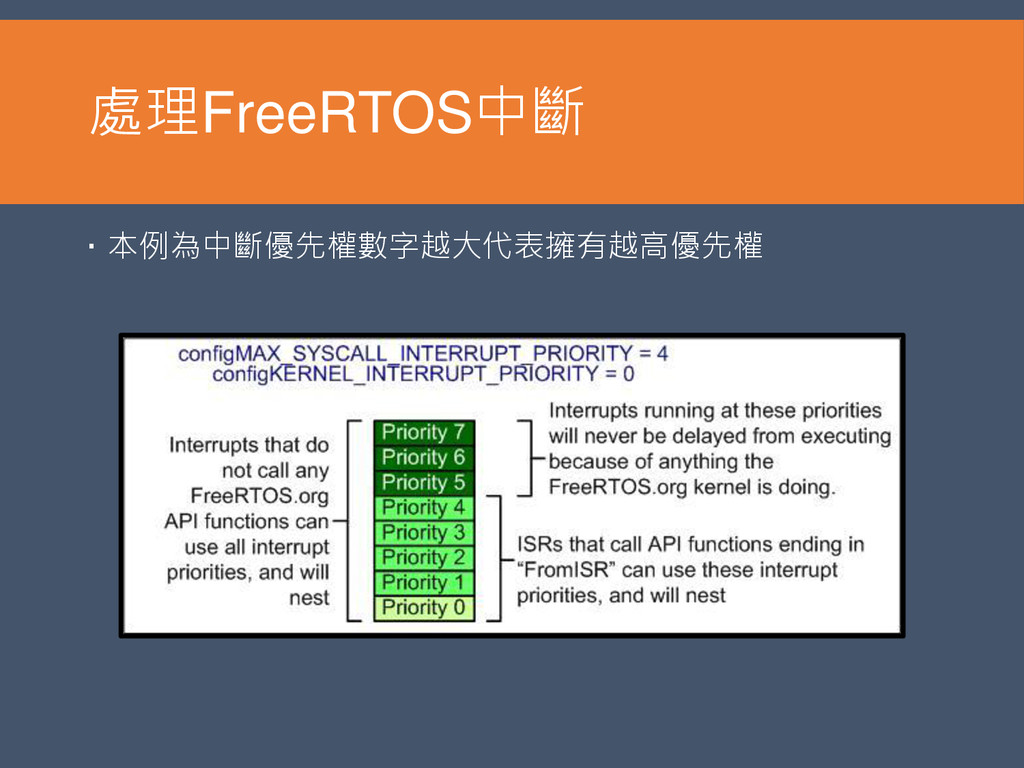
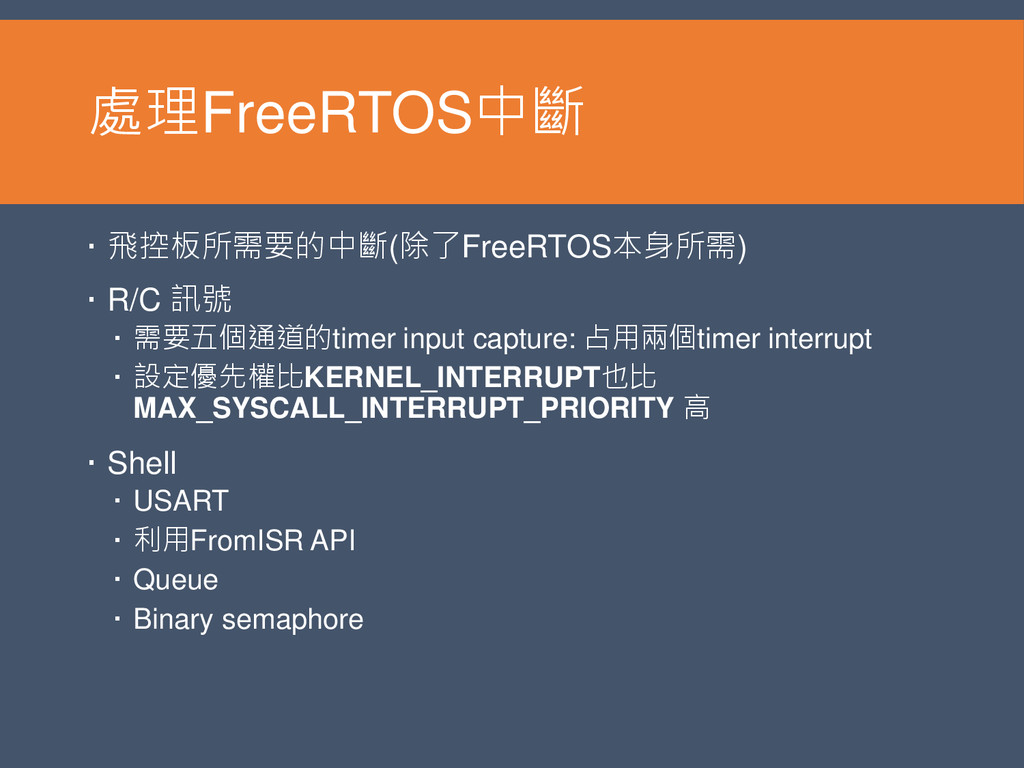
used by the RTOS kernel itself configMAX_SYSCALL_INTERRUPT_PRIORITY sets the highest interrupt priority from which interrupt safe FreeRTOS API functions can be called(FromISR API)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![最後… 如果不怕危險,有興趣參與開發請洽我: email: [email protected] Github repository http://moon-bear.github.io/](https://files.speakerdeck.com/presentations/c7597170ace80131dd940ac15ed77645/slide_81.jpg){kind=link}
{kind=link}