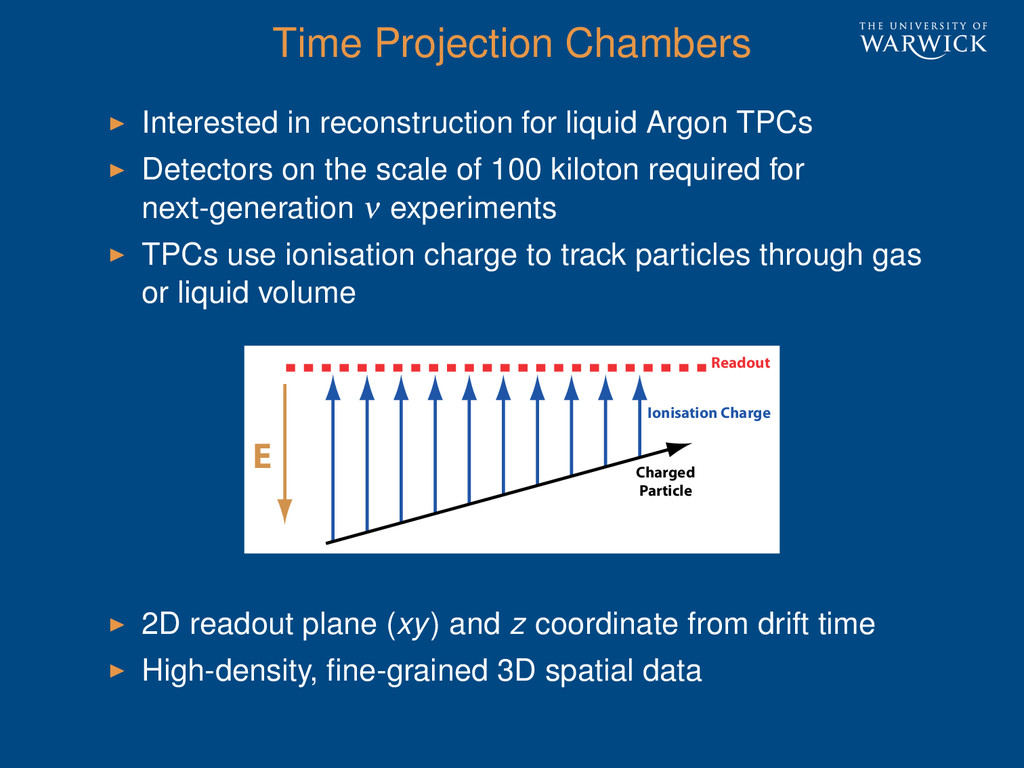
Detectors on the scale of 100 kiloton required for next-generation ν experiments TPCs use ionisation charge to track particles through gas or liquid volume E Readout Charged Particle Ionisation Charge 2D readout plane (xy) and z coordinate from drift time High-density, fine-grained 3D spatial data
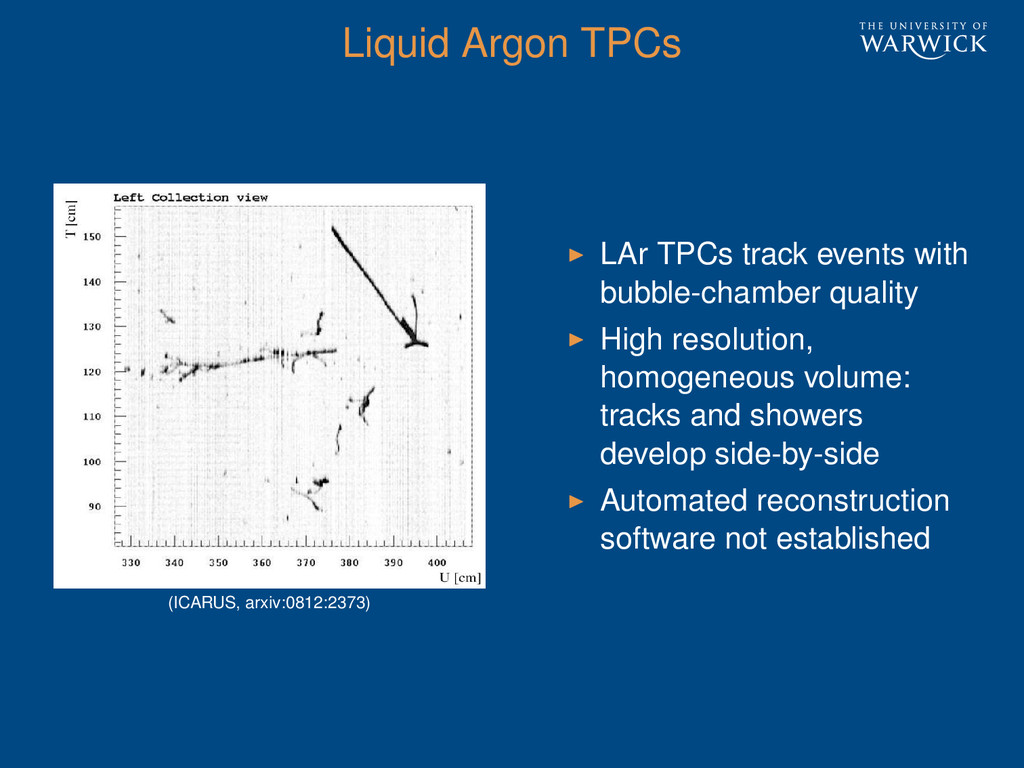
radiating from this point Multiple scattering mostly at well-defined boundaries Tracks and showers develop separately; track hits easy to find LAr TPCs No well-defined start point for ν interactions High density of hit information throughout Multiple scattering throughout volume Tracks and showers develop together; tracks difficult to find amongst other hits Need to classify hit information (energy deposited) as tracks or showers to do PID and kinematics
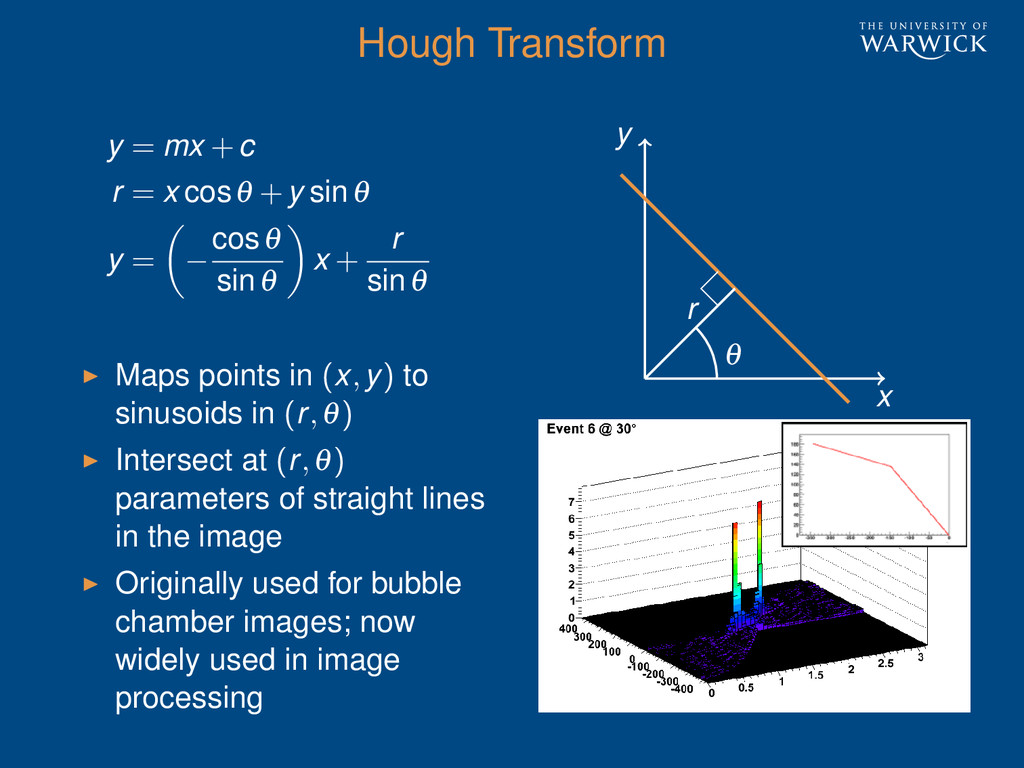
+y sinθ y = − cosθ sinθ x + r sinθ Maps points in (x,y) to sinusoids in (r,θ) Intersect at (r,θ) parameters of straight lines in the image Originally used for bubble chamber images; now widely used in image processing y x r θ
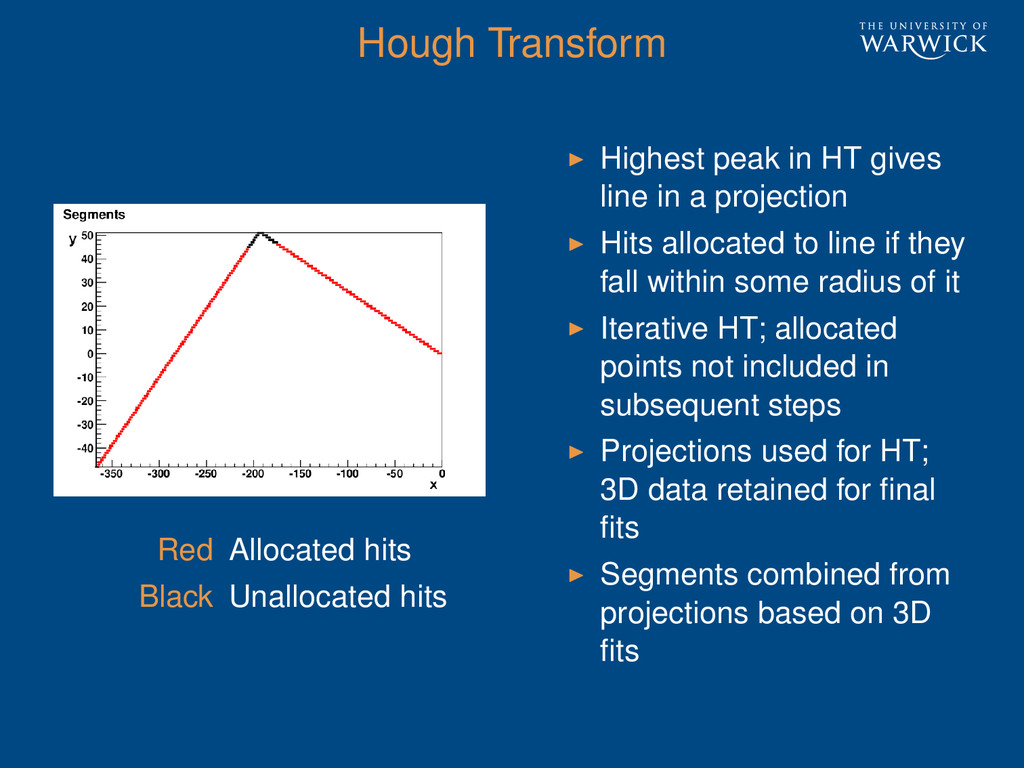
in HT gives line in a projection Hits allocated to line if they fall within some radius of it Iterative HT; allocated points not included in subsequent steps Projections used for HT; 3D data retained for final fits Segments combined from projections based on 3D fits
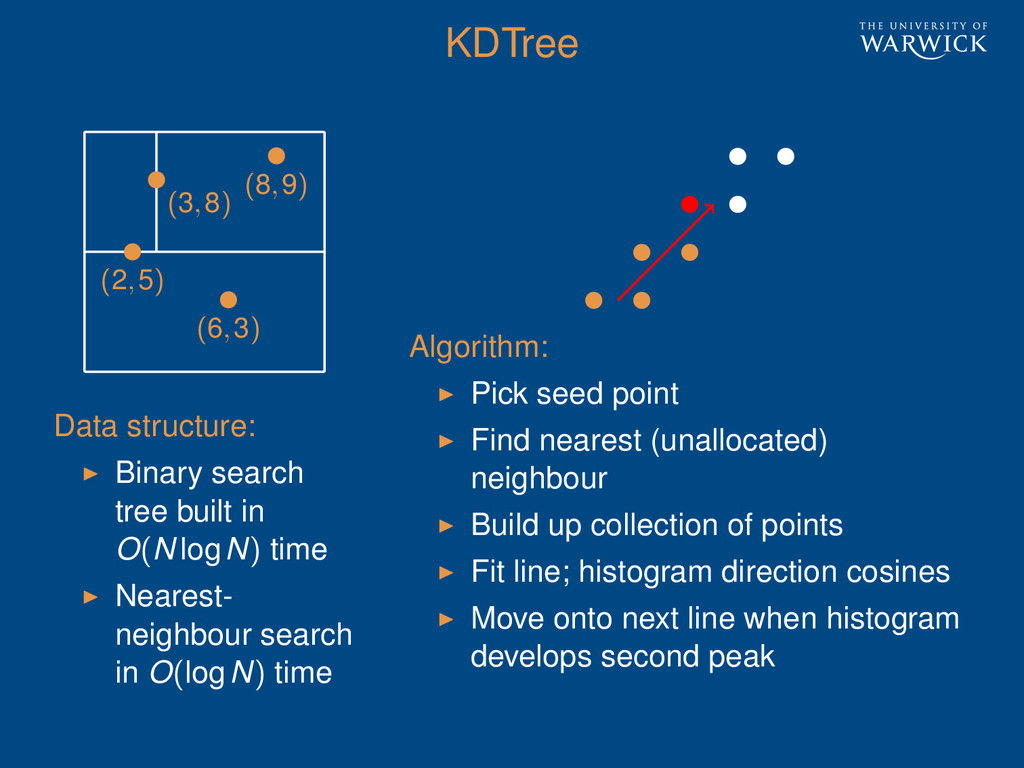
built in O(N logN) time Nearest- neighbour search in O(logN) time Algorithm: Pick seed point Find nearest (unallocated) neighbour Build up collection of points Fit line; histogram direction cosines Move onto next line when histogram develops second peak
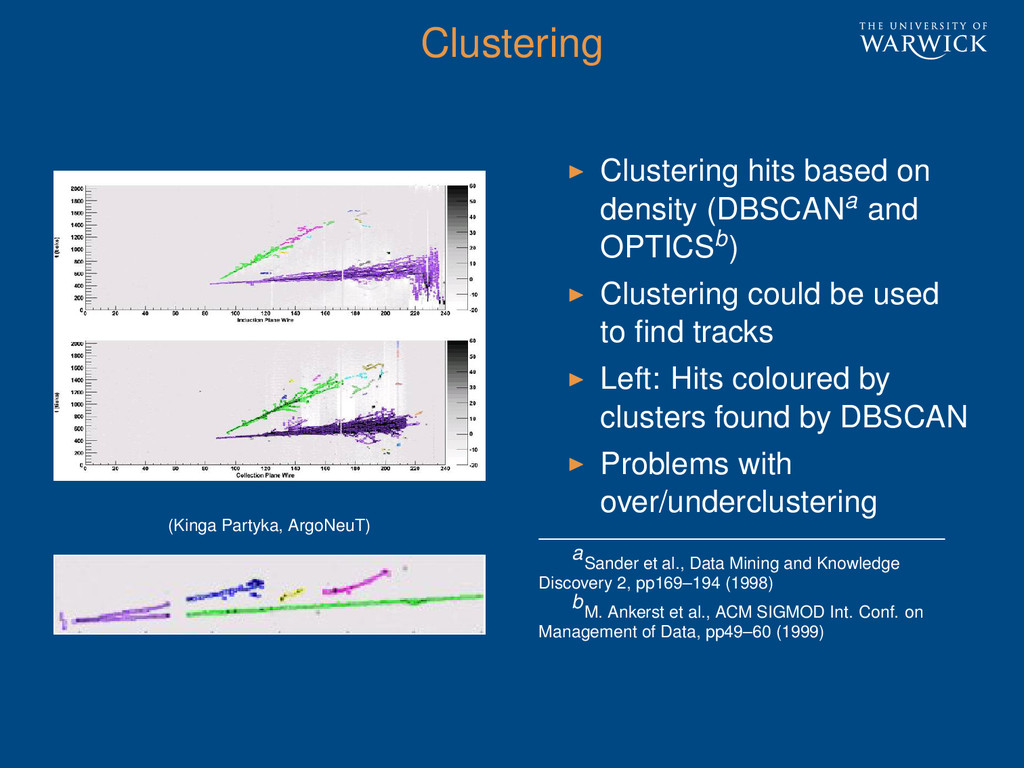
and OPTICSb) Clustering could be used to find tracks Left: Hits coloured by clusters found by DBSCAN Problems with over/underclustering a Sander et al., Data Mining and Knowledge Discovery 2, pp169–194 (1998) b M. Ankerst et al., ACM SIGMOD Int. Conf. on Management of Data, pp49–60 (1999)
end points KDTree algorithm relies on moving through corners to see gradient changes KDTree algorithm requires a seed point; any will do, but some are better than others Clustering algorithms pick out related points, but some clusters ‘wrap around’ corners Interest-point detection finds corners and endpoints to help tracking algorithms
results with spatial data & image processing techniques Ability to tag feature points with high efficiency is required for progress Showers are complex features which appear side-by-side with tracks Feature detection can be used as input to a variety of track & shower fitting algorithms Many more image processing & feature extraction techniques to explore Work is progressing in the UK, Europe and the U.S. — collaborative links are developing
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}