Zhou, "CVIDS: A Collaborative Localization and Dense Mapping Framework for Multi-Agent Based Visual-Inertial SLAM," in IEEE Transactions on Image Processing, vol. 31, pp. 6562-6576, 2022. [2] W. Giernacki, M. Skwierczyński, W. Witwicki, P. Wroński, and P. Kozierski, “Crazyflie 2.0 quadrotor as a platform for research and education in robotics and control engineering,” in 2017 22nd International Conference on Methods and Models in Automation and Robotics(MMAR), pp. 37–42, IEEE, 2017. [3] A. D. Ames, X. Xu, J. W. Grizzle, and P. Tabuada, “Control barrier function based quadratic programs for safety critical systems,” IEEE Transactions on Automatic Control, Vol. 62, No. 8, pp. 3861-3876, 2017. [4] R. Heusdens and G. Zhang, “Distributed OptimisationWith Linear Equality and Inequality Constraints Using PDMM,” IEEE Transactions on Signal and Information Processing over Networks, Vol. 10, pp. 294-306, 2024. 15
{kind=link}
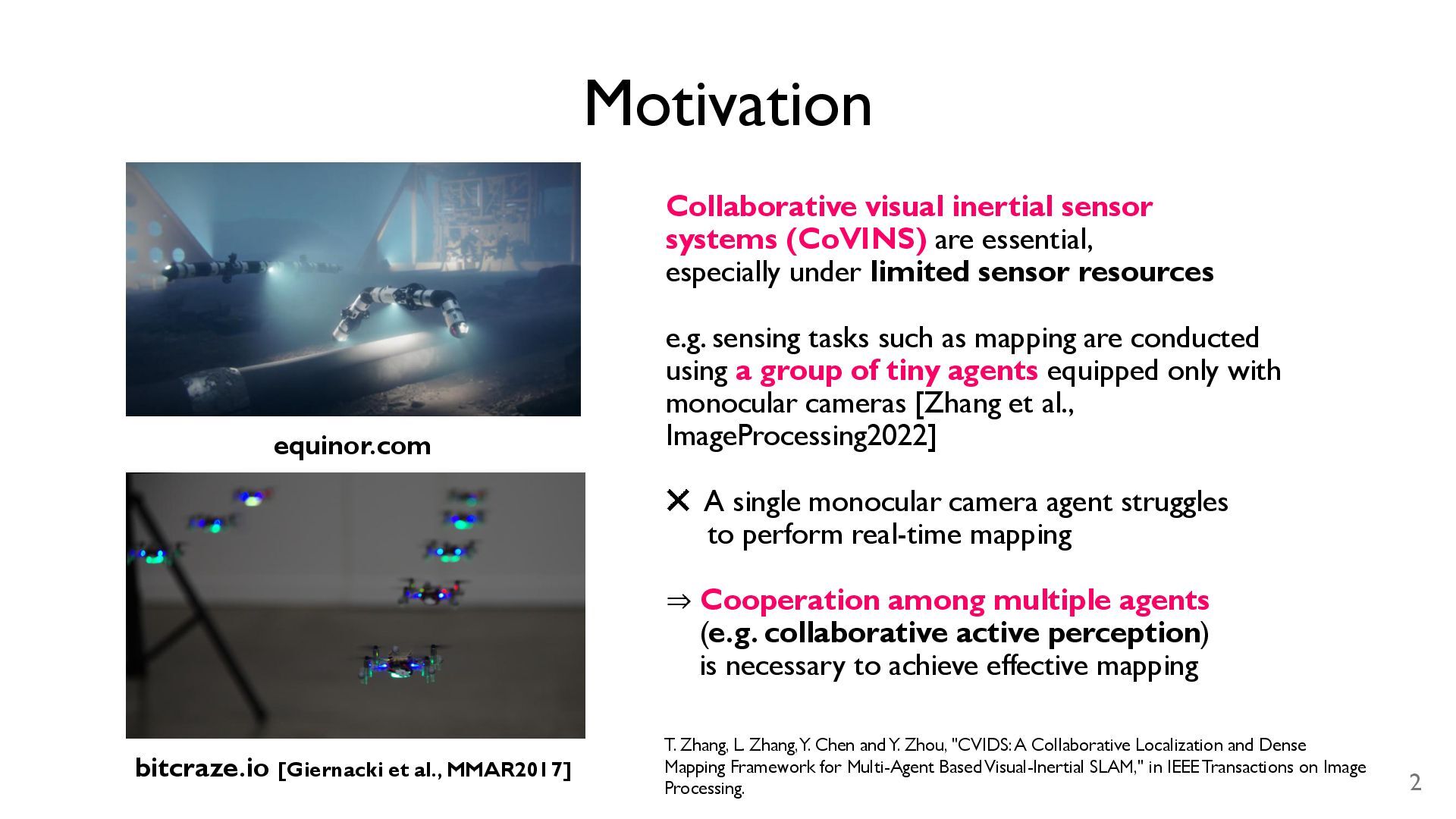{kind=link}
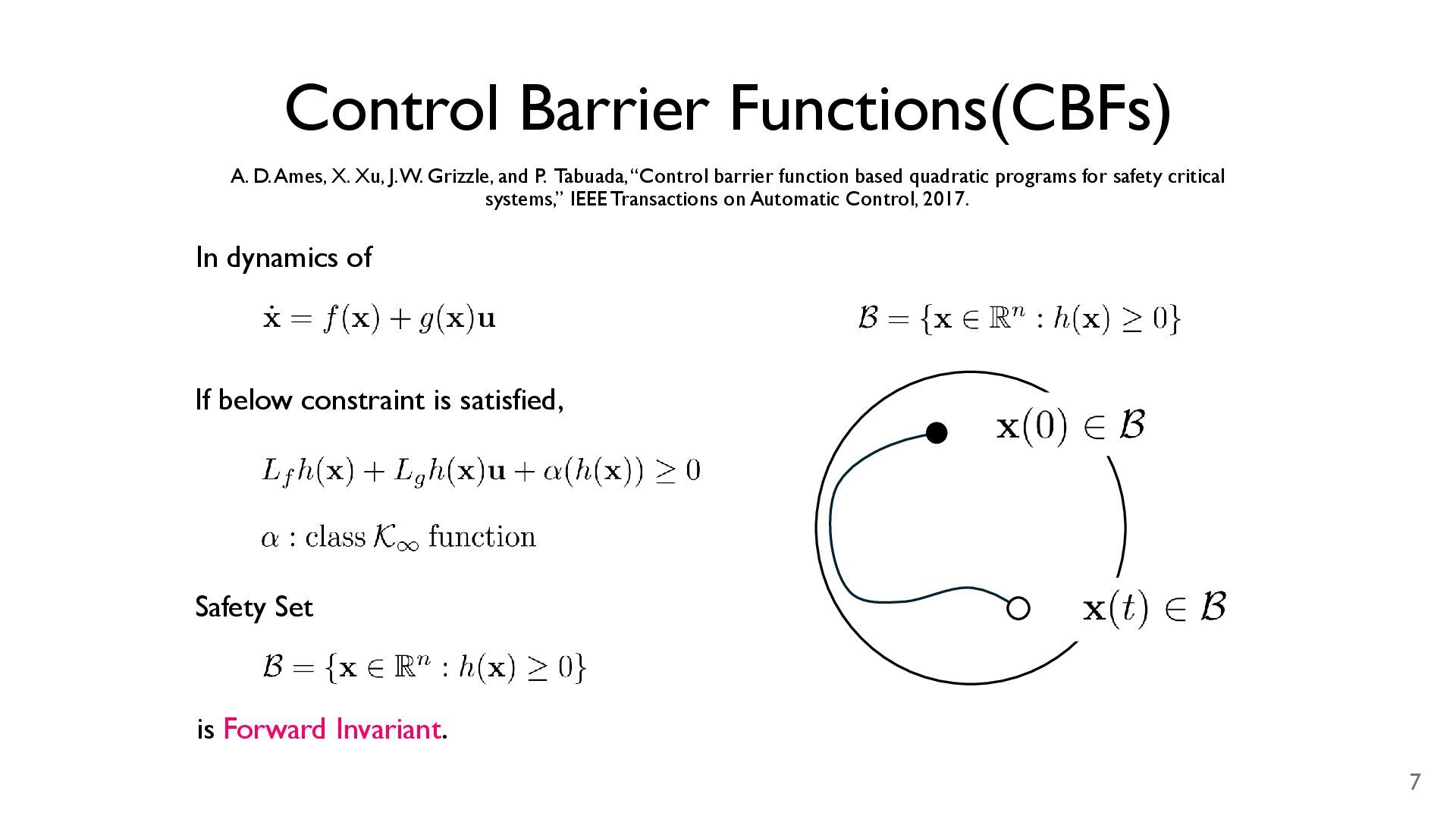
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Distributed CBFs by PDMM [Heusdens et al., Signal Processing2024] Centralized](https://files.speakerdeck.com/presentations/9d7a92c12fe746ec8b23d7376f086724/slide_10.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![Reference [1] T. Zhang, L. Zhang, Y. Chen and Y.](https://files.speakerdeck.com/presentations/9d7a92c12fe746ec8b23d7376f086724/slide_14.jpg){kind=link}