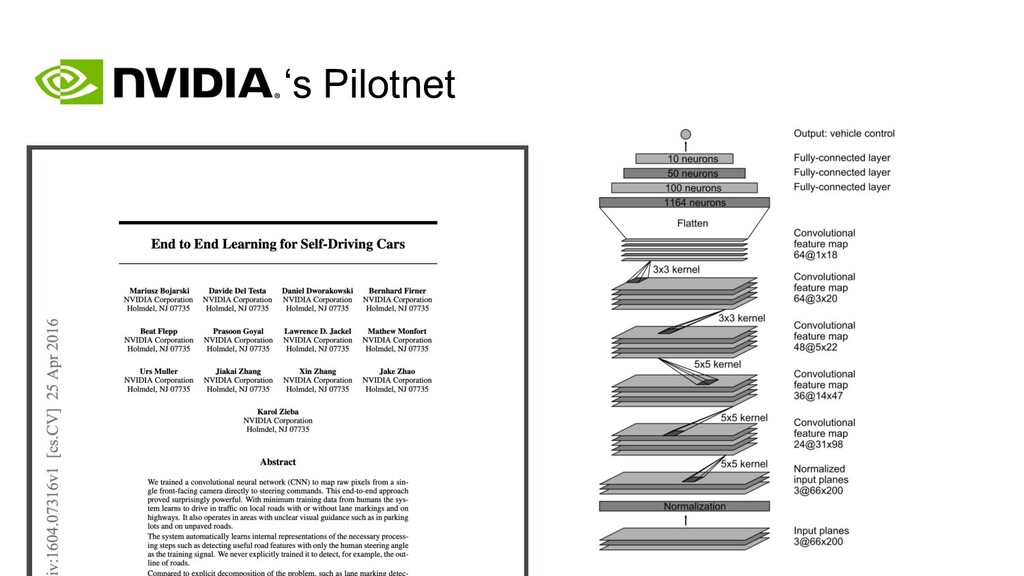
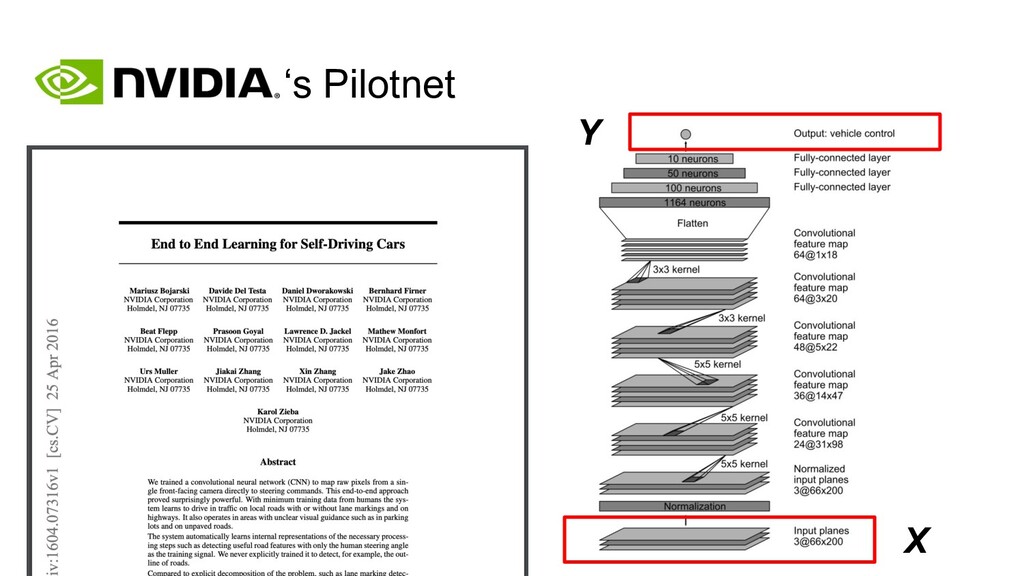
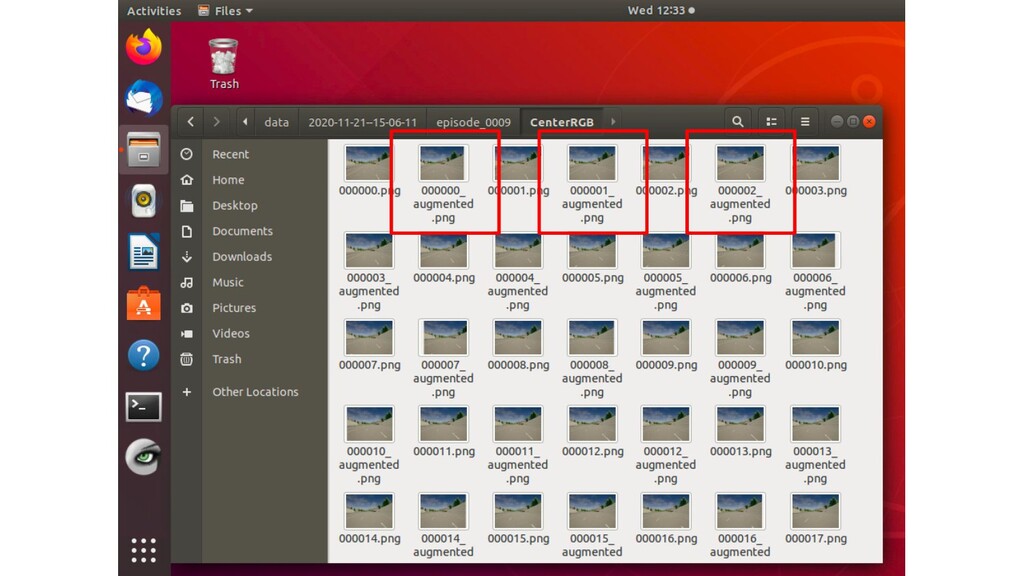
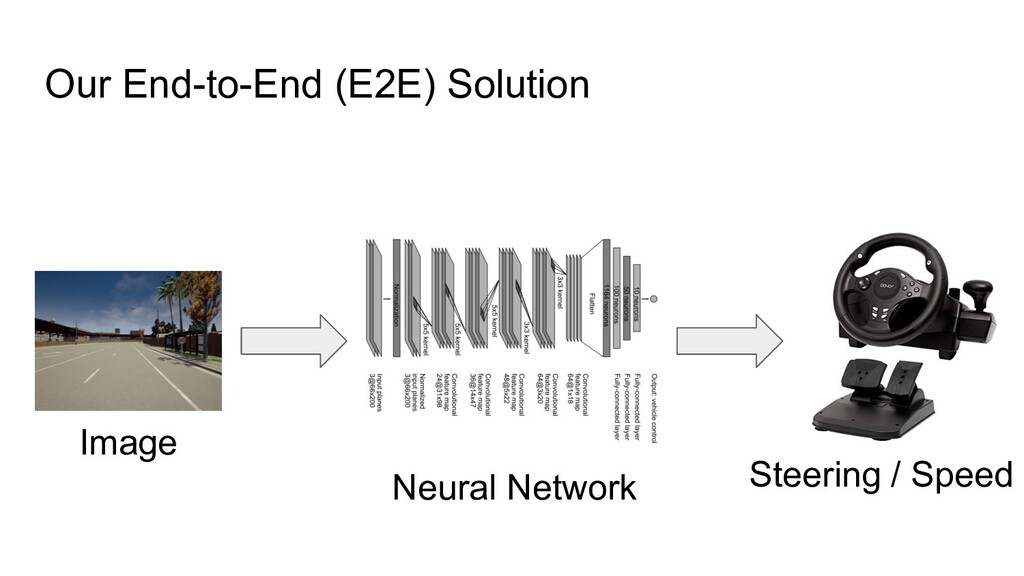
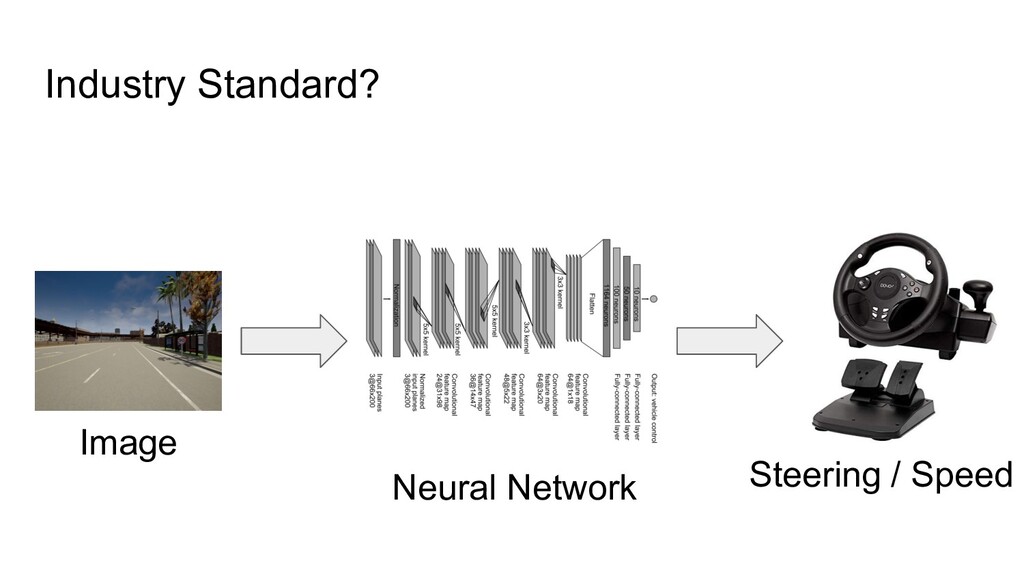
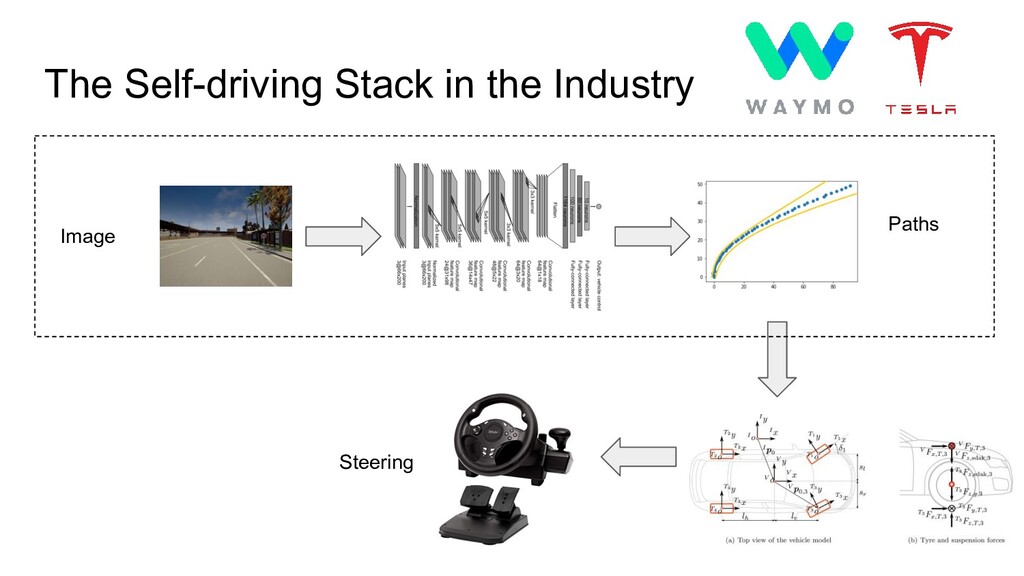
with the corresponding steering command (1/r). Training with data from only the human driver is not sufficient. The network must learn how to recover from mistakes. Otherwise the car will slowly drift off the road. The training data is therefore augmented with additional images that show the car in different shifts from the center of the lane and rotations from the direction of the road. Bojarski, Mariusz, et al. “End to End Learning for Self-Driving Cars.” ArXiv.org, 25 Apr. 2016, arxiv.org/abs/1604.07316.
with the corresponding steering command (1/r). Training with data from only the human driver is not sufficient. The network must learn how to recover from mistakes. Otherwise the car will slowly drift off the road. The training data is therefore augmented with additional images that show the car in different shifts from the center of the lane and rotations from the direction of the road. Bojarski, Mariusz, et al. “End to End Learning for Self-Driving Cars.” ArXiv.org, 25 Apr. 2016, arxiv.org/abs/1604.07316.
opportunities for all - here’s mine • EC2 is great for on-demand GPUs i.e. ML side projects • Pytorch >> TensorFlow • Machine Learning is 99% infrastructure and 1% Machine Learning • Best way to learn is to build it on your own
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}