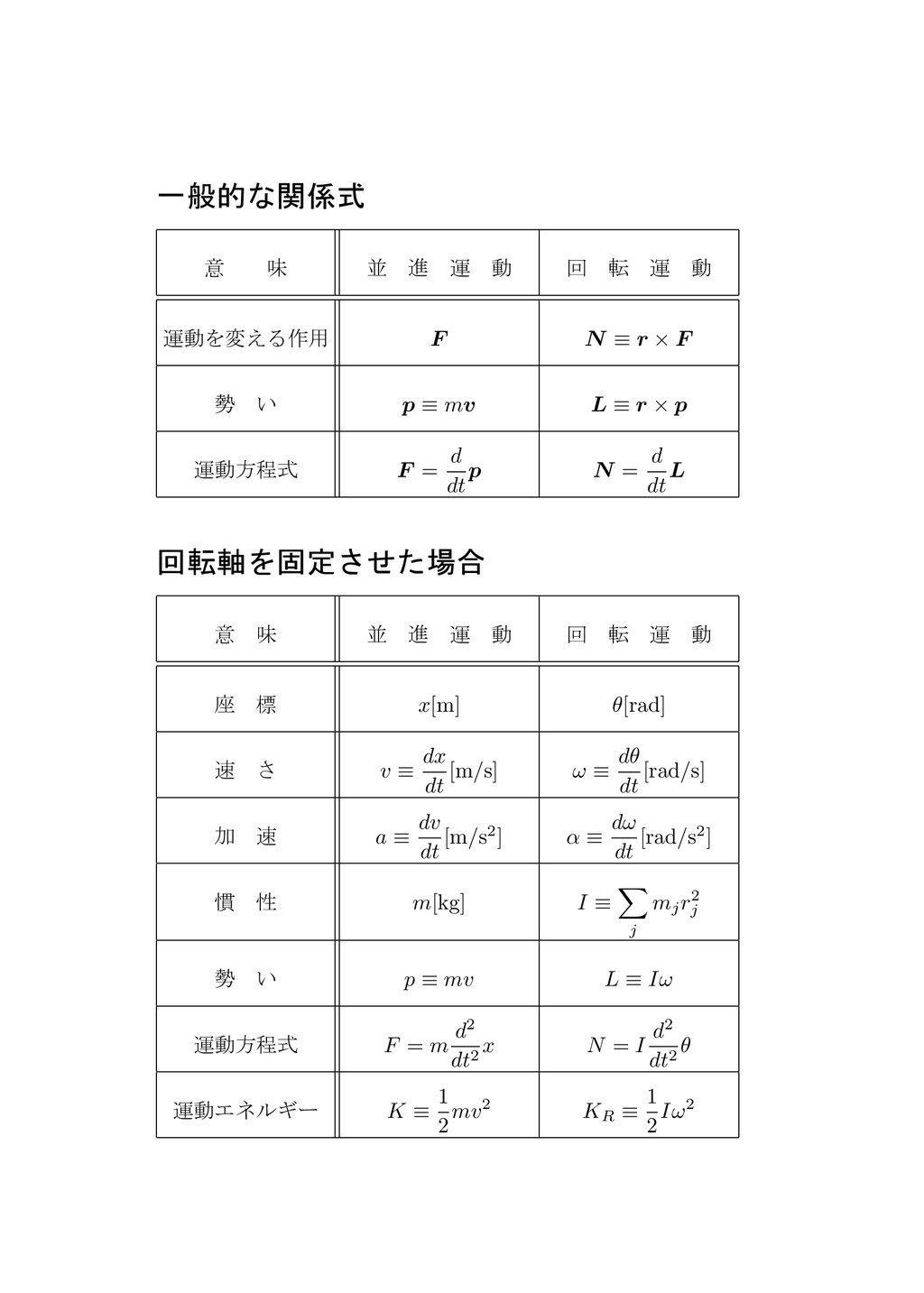
F ɹ͍ p ≡ mv L ≡ r × p ӡಈํఔࣜ F = d dt p N = d dt L ճస࣠Λݻఆͤͨ͞߹ ҙɹຯ ɹฒɹਐɹӡɹಈɹ ɹճɹసɹӡɹಈɹ ࠲ɹඪ x[m] θ[rad] ɹ͞ v ≡ dx dt [m/s] ω ≡ dθ dt [rad/s] Ճɹ a ≡ dv dt [m/s2] α ≡ dω dt [rad/s2] ׳ɹੑ m[kg] I ≡ ∑ j mj r2 j ɹ͍ p ≡ mv L ≡ Iω ӡಈํఔࣜ F = m d2 dt2 x N = I d2 dt2 θ ӡಈΤωϧΪʔ K ≡ 1 2 mv2 KR ≡ 1 2 Iω2
{kind=link}