Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
ROSCon2019Macau参加報告_ShojiMorita.pdf
Search
dankuro1
November 29, 2019
Technology
650
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
ROSCon2019Macau参加報告_ShojiMorita.pdf
dankuro1
November 29, 2019
More Decks by dankuro1
See All by dankuro1
ROSCon2019Macau参加報告_NatsukiMuto.pdf
dankuro1
0
560
Other Decks in Technology
See All in Technology
AIチャット検索改善の3週間
kworkdev
PRO
2
200
UIパーツの設計を「型」から読み解く 〜TSKaigiのセッションから得た学び〜
yud0uhu
0
100
アラート調査向けAIエージェントの本番導入とその後/AI Agents for Alert Investigation: Production Deployment and After
taddy_919
1
240
組織における AI-DLC 実践
askul
0
140
[AWS Summit Japan 2026]迷っているあなたへ_小さな一歩が、やがて自分を助けてくれる
sh_fk2
2
430
IaC コードを資産へ:AWS CDK 社内ライブラリと横断展開 / aws-summit-japan-2026
gotok365
10
1.6k
AI-DLCを “そのまま導入しなかった”話 ~組織に合わせてアジャストした 私たちの実践共有~
hiroramos4
PRO
1
440
本当の”仕事”を手放せる未来が見えた
mu7889yoon
0
190
BPaaSで進むAIオペレーションの現在地 AI実装が効く領域とスケーラビリティの選定と実装
kentarofujii
0
210
コミュニティの有益性 ~JAWS Days 2026 での体験を通して~ / The Benefits of a Community ~Through My Experience at JAWS Days 2026~
seike460
PRO
0
300
When Platform Engineering Meets GenAI
sucitw
0
200
Microsoft のサポートとフィードバック総まとめ
murachiakira
PRO
0
110
Featured
See All Featured
Getting science done with accelerated Python computing platforms
jacobtomlinson
2
240
Distributed Sagas: A Protocol for Coordinating Microservices
caitiem20
333
23k
CSS Pre-Processors: Stylus, Less & Sass
bermonpainter
360
30k
Writing Fast Ruby
sferik
630
63k
Joys of Absence: A Defence of Solitary Play
codingconduct
1
400
Navigating the moral maze — ethical principles for Al-driven product design
skipperchong
2
400
Designing Experiences People Love
moore
143
24k
The untapped power of vector embeddings
frankvandijk
2
1.8k
A Soul's Torment
seathinner
6
3k
VelocityConf: Rendering Performance Case Studies
addyosmani
333
25k
Mind Mapping
helmedeiros
PRO
1
260
The Pragmatic Product Professional
lauravandoore
37
7.3k
Transcript
ROSCon 2019参加報告 RMW中心で見た場合
最初に ROSCon 2019の発表内容の記憶とメモをベースにしています。 ROSCON 2019 https://roscon.ros.org/2019/
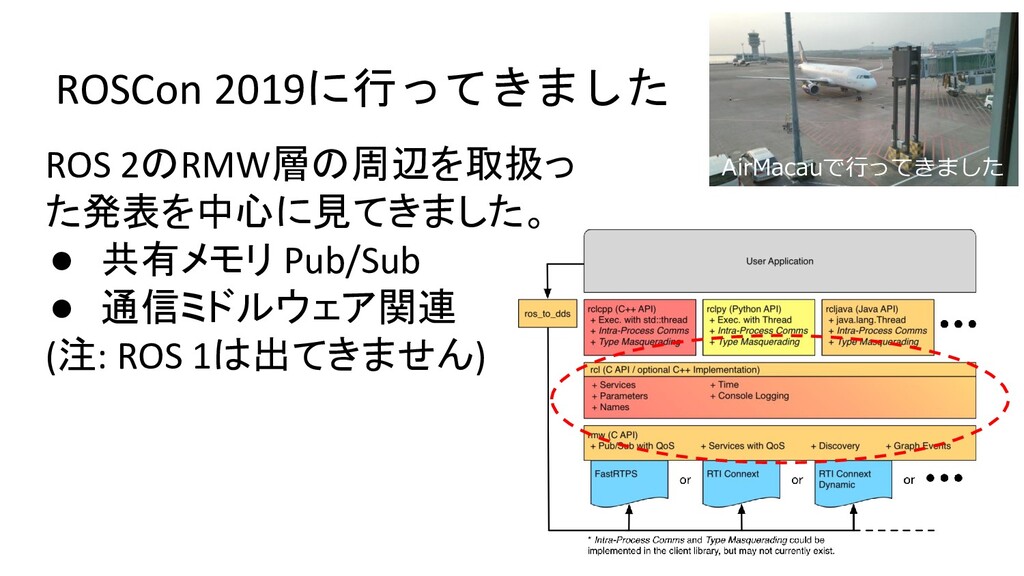
ROSCon 2019に行ってきました ROS 2のRMW層の周辺を取扱っ た発表を中心に見てきました。 • 共有メモリ Pub/Sub • 通信ミドルウェア関連
(注: ROS 1は出てきません) KLMで行きました AirMacauで行ってきました
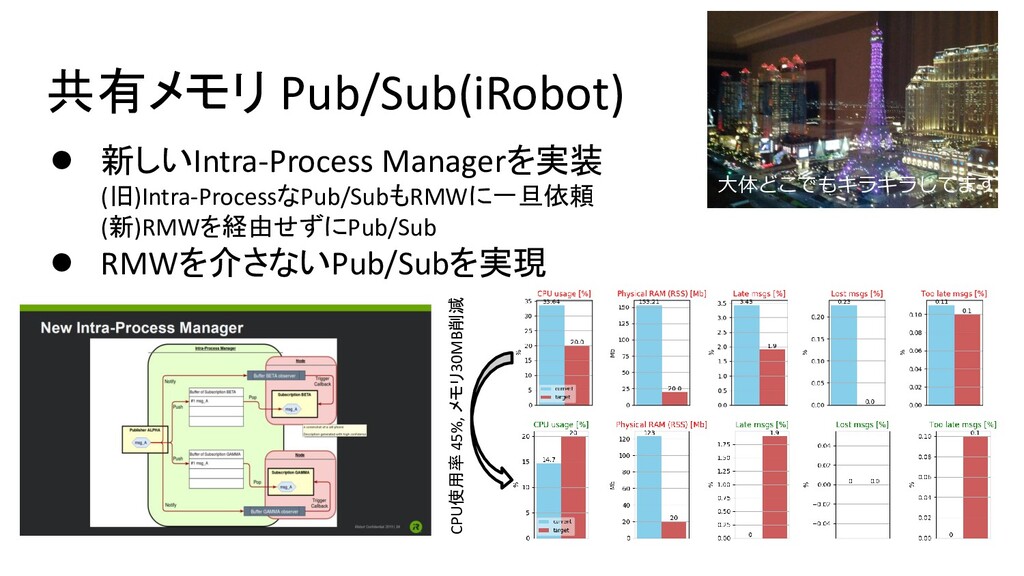
共有メモリ Pub/Sub(iRobot) • 新しいIntra-Process Managerを実装 (旧)Intra-ProcessなPub/SubもRMWに一旦依頼 (新)RMWを経由せずにPub/Sub • RMWを介さないPub/Subを実現 CPU使用率
45%, メモリ30MB削減 大体どこでもキラキラしてます
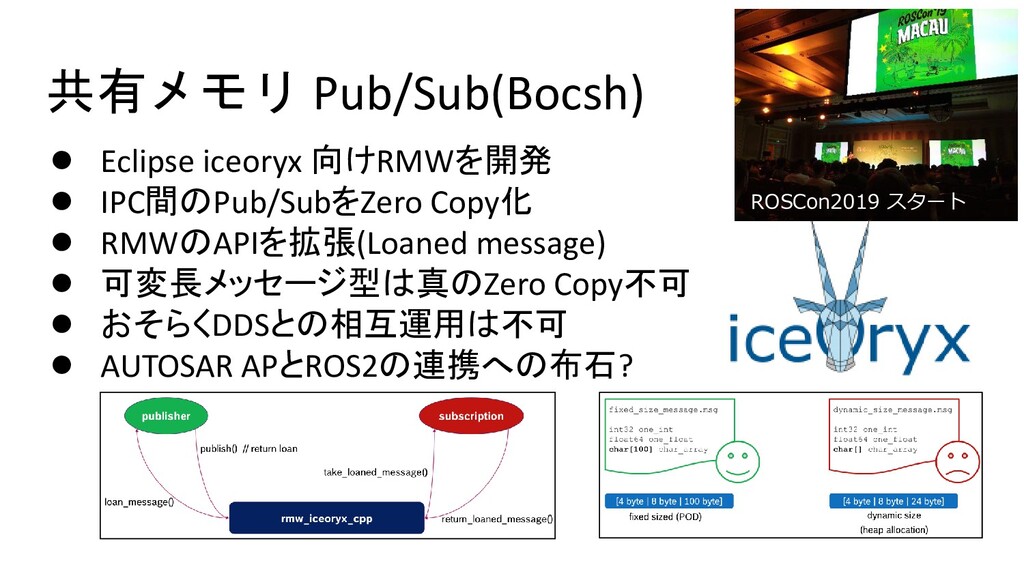
共有メモリ Pub/Sub(Bocsh) • Eclipse iceoryx 向けRMWを開発 • IPC間のPub/SubをZero Copy化 •
RMWのAPIを拡張(Loaned message) • 可変長メッセージ型は真のZero Copy不可 • おそらくDDSとの相互運用は不可 • AUTOSAR APとROS2の連携への布石? ROSCon2019 スタート
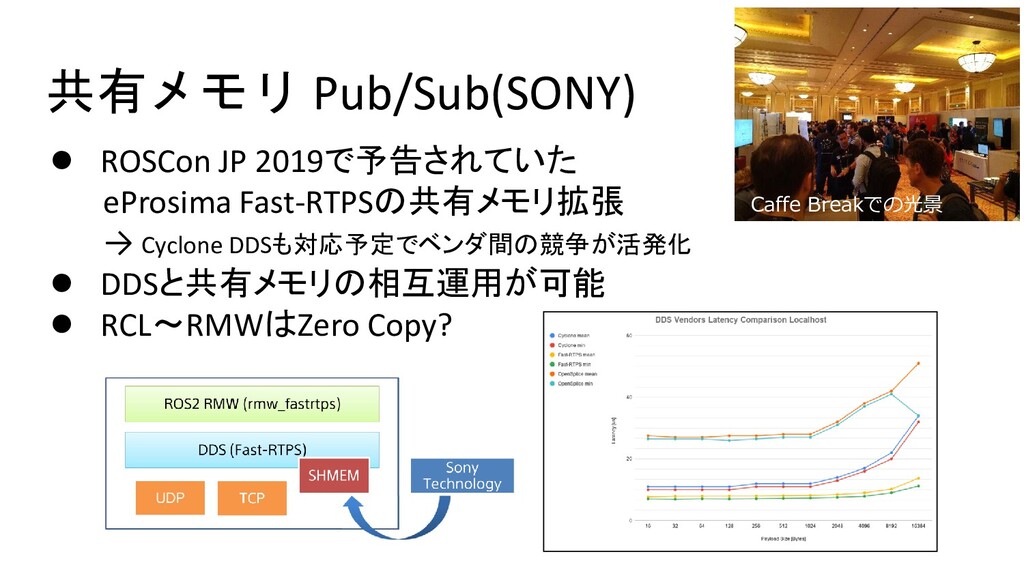
共有メモリ Pub/Sub(SONY) • ROSCon JP 2019で予告されていた eProsima Fast-RTPSの共有メモリ拡張 → Cyclone
DDSも対応予定でベンダ間の競争が活発化 • DDSと共有メモリの相互運用が可能 • RCL~RMWはZero Copy? Caffe Breakでの光景
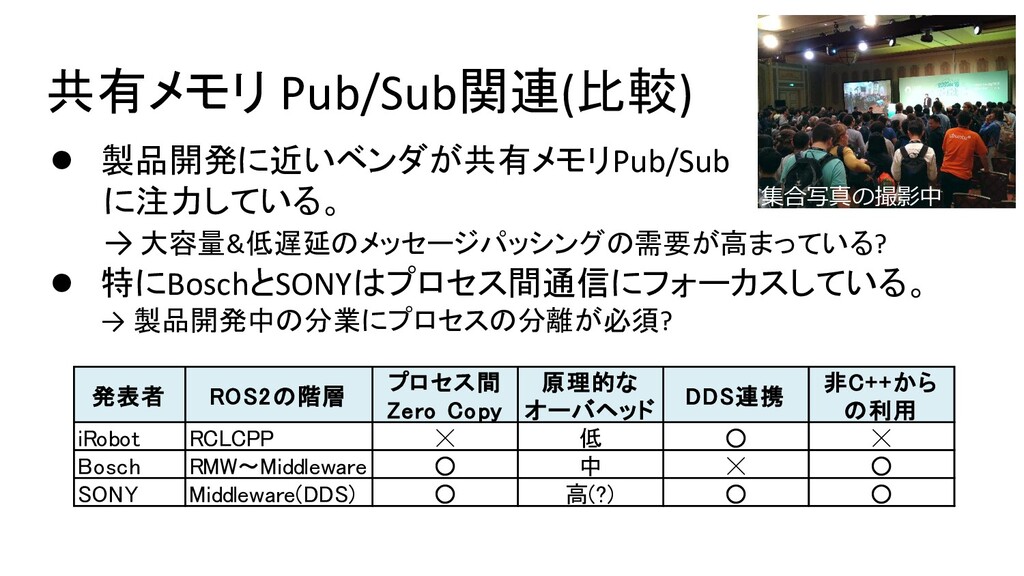
共有メモリ Pub/Sub関連(比較) • 製品開発に近いベンダが共有メモリPub/Sub に注力している。 → 大容量&低遅延のメッセージパッシングの需要が高まっている? • 特にBoschとSONYはプロセス間通信にフォーカスしている。 →
製品開発中の分業にプロセスの分離が必須? DAY 0:Realtime Workshop 集合写真の撮影中 発表者 ROS2の階層 プロセス間 Zero Copy 原理的な オーバヘッド DDS連携 非C++から の利用 iRobot RCLCPP ☓ 低 ◦ ☓ Bosch RMW~Middleware ◦ 中 ☓ ◦ SONY Middleware(DDS) ◦ 高(?) ◦ ◦
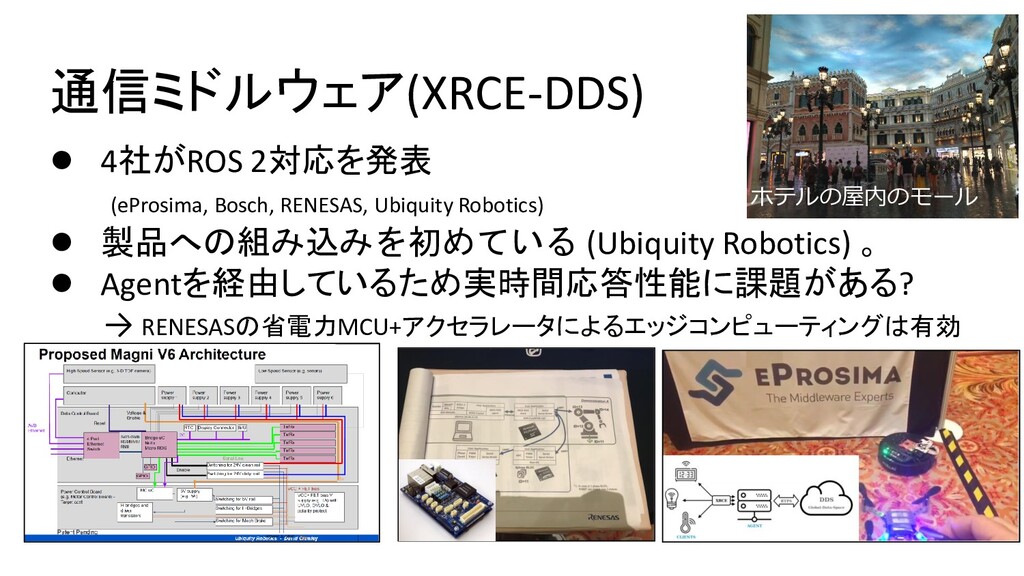
通信ミドルウェア(XRCE-DDS) • 4社がROS 2対応を発表 (eProsima, Bosch, RENESAS, Ubiquity Robotics) •
製品への組み込みを初めている (Ubiquity Robotics) 。 • Agentを経由しているため実時間応答性能に課題がある? → RENESASの省電力MCU+アクセラレータによるエッジコンピューティングは有効 ホテルの屋内のモール
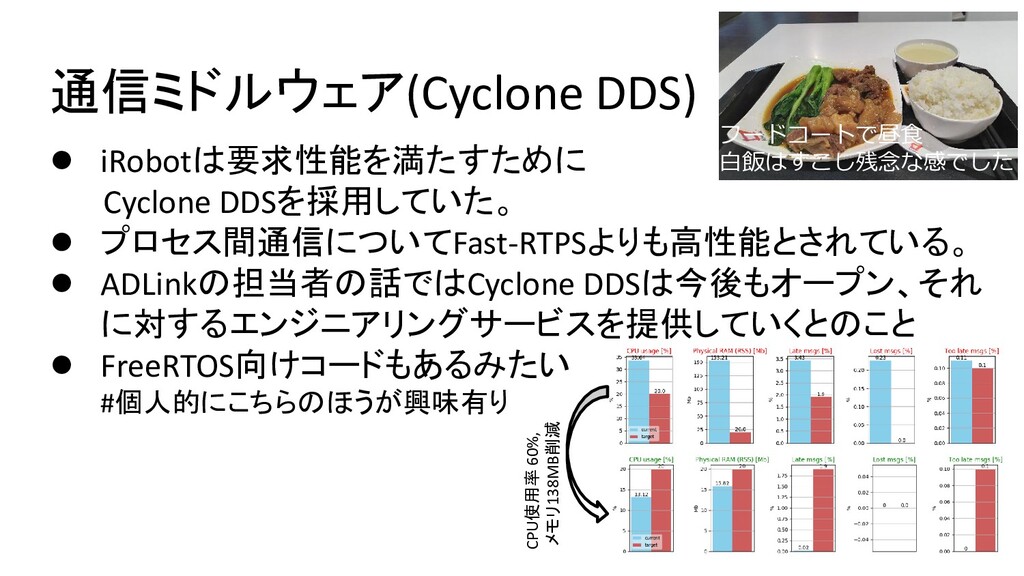
通信ミドルウェア(Cyclone DDS) • iRobotは要求性能を満たすために Cyclone DDSを採用していた。 • プロセス間通信についてFast-RTPSよりも高性能とされている。 • ADLinkの担当者の話ではCyclone
DDSは今後もオープン、それ に対するエンジニアリングサービスを提供していくとのこと • FreeRTOS向けコードもあるみたい #個人的にこちらのほうが興味有り CPU使用率 60%, メモリ138MB削減 フードコートで昼食 白飯はすこし残念な感でした
その他所感 • ROS 1/2共に去年よりも製品開発や デプロイに軸をおいた発表が多かった。 • 特にROS 2は去年までは導入&実験が中心だったので、1年間 でプラットフォームとしてかなりこなれてきたように見える。 •
MoveIt2 & Navigation2のようなキラーアプリも準備されつつあ り、業務で顧客に導入を勧めるのは、まずROS 2になりそうだ。 • ROS2への機能追加は継続しているようなので、欲しい機能は WG参加、DesignのPRを積極的にしましょう。 マカオともお別れ
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}