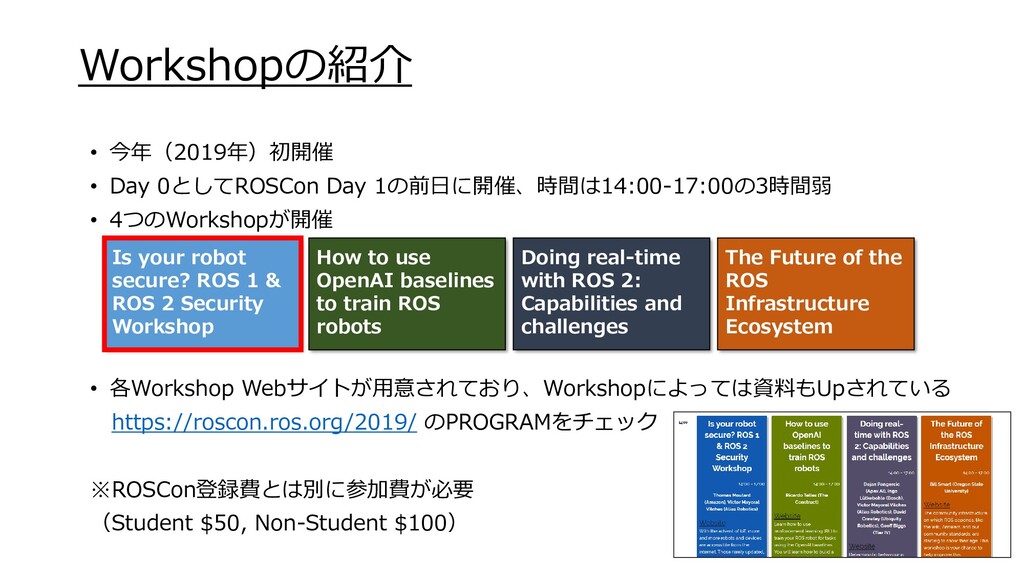
• 各Workshop Webサイトが用意されており、Workshopによっては資料もUpされている https://roscon.ros.org/2019/ のPROGRAMをチェック ※ROSCon登録費とは別に参加費が必要 (Student $50, Non-Student $100) How to use OpenAI baselines to train ROS robots The Future of the ROS Infrastructure Ecosystem Doing real-time with ROS 2: Capabilities and challenges Is your robot secure? ROS 1 & ROS 2 Security Workshop
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}