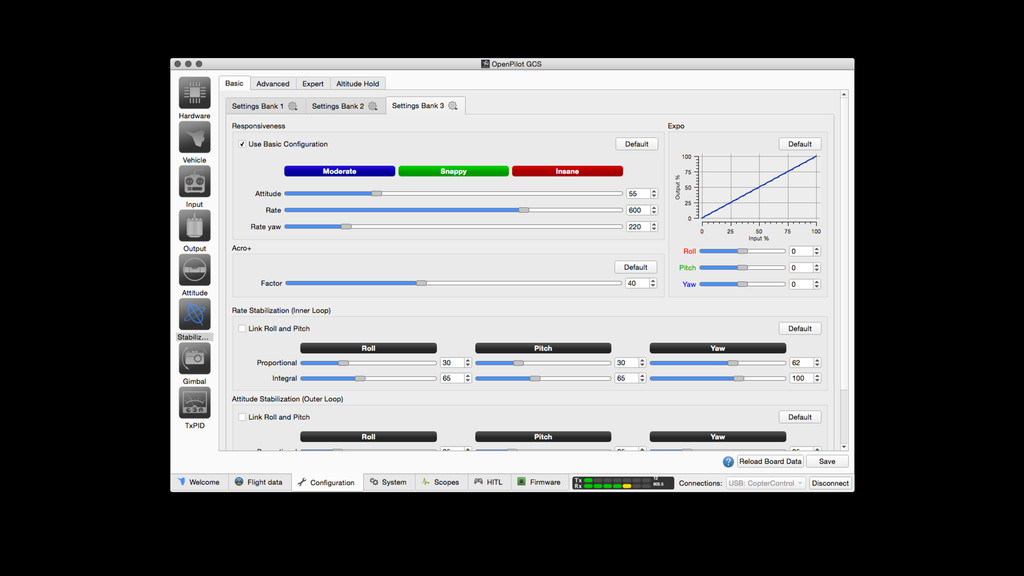
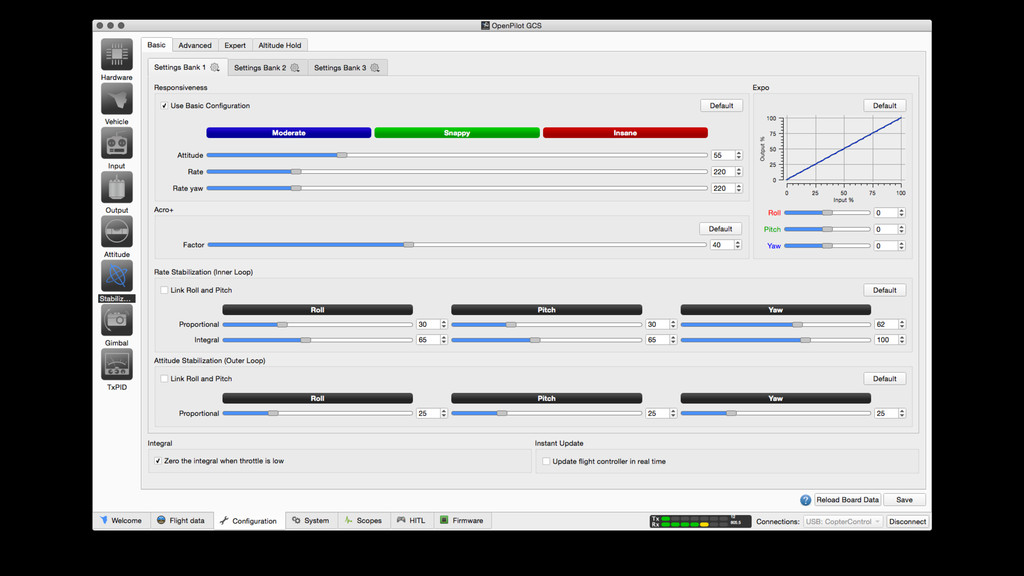
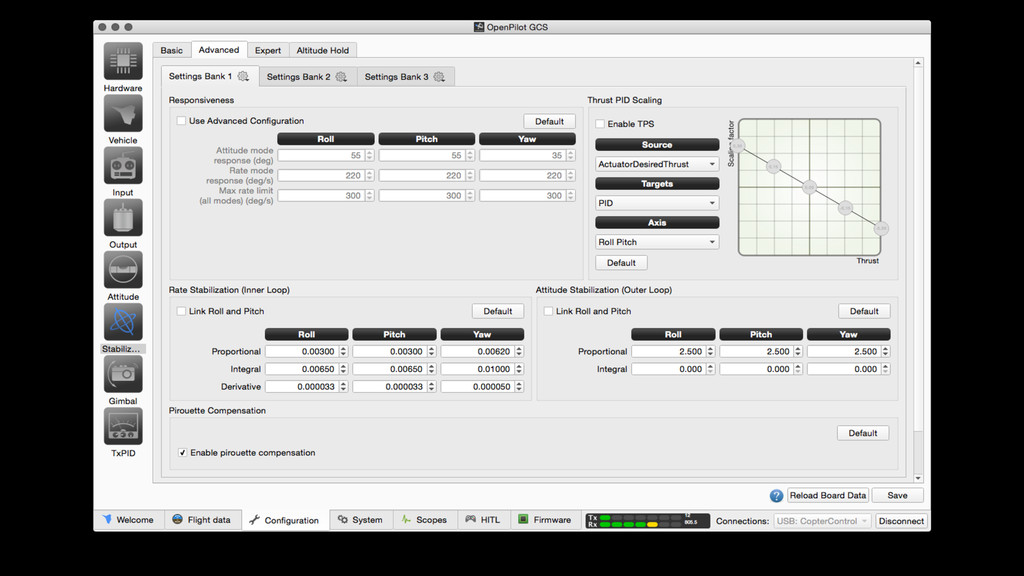
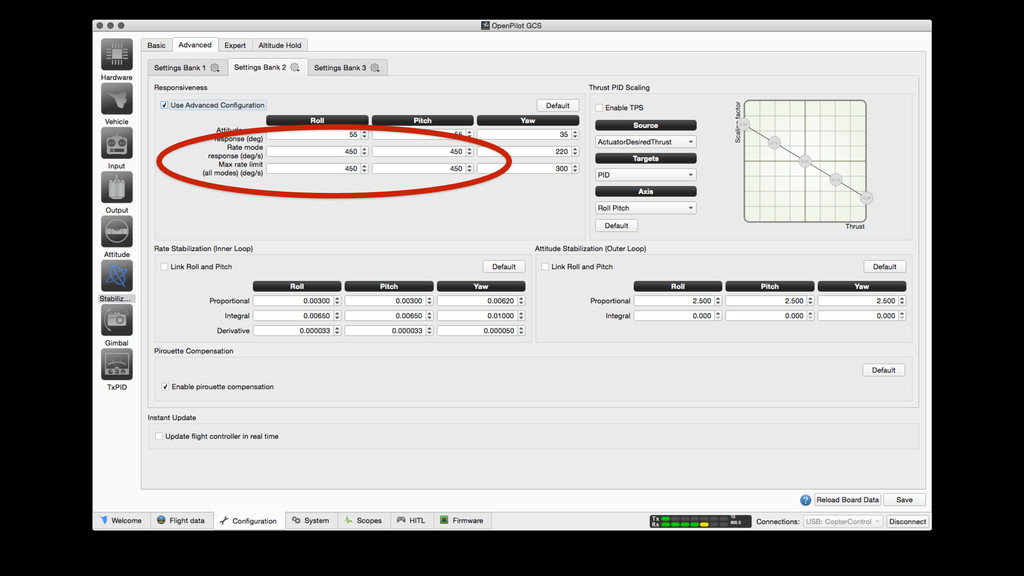
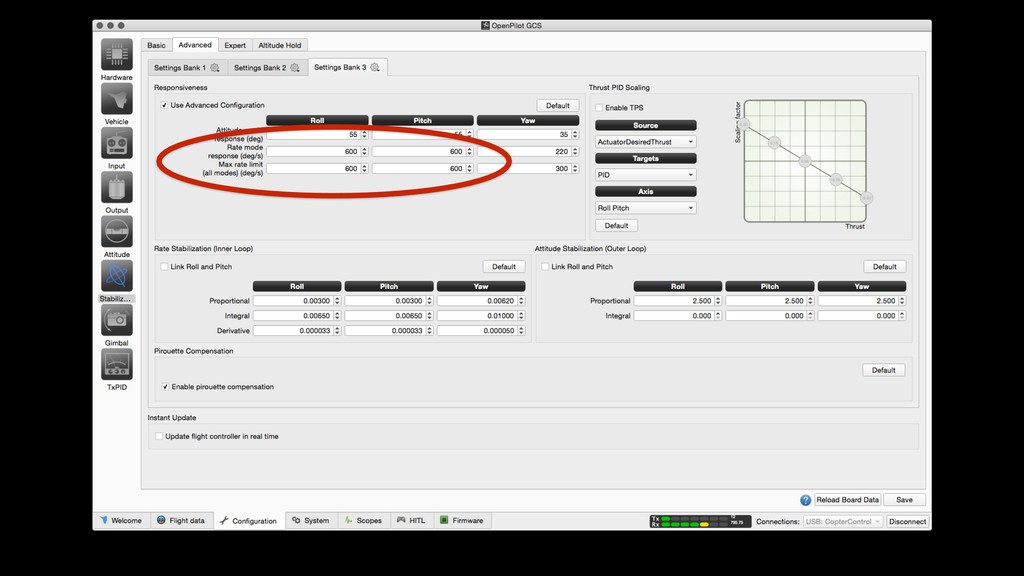
The OpenPilot flight controller has many powerful features. Many of these are specific to the setup and configuration of the flight controller while others manage the controllers flight characteristics. This session will discuss many advanced features, including Acro flight (by bypassing the gyro for rotation during stronger stick deflections and applying manual output signals to the ESCs); thrust pid scaling, a mechanism to compensate for optimally-tuned vehicles for hover or slow flight envelope by adjusting the PID (Proportional, Integral, Derivative) value dynamically against a throttle position so that Fast Forward Flight (FFF) doesn't create oscillations, and failsafe for Revo and CC3D. These, plus other advanced topics will be presented during this class.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![[email protected]](https://files.speakerdeck.com/presentations/04c25180a771434f987b11b00d15c7f8/slide_5.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![dj daugherty [email protected] @ddaugher thanks. https://speakerdeck.com/ddaugher](https://files.speakerdeck.com/presentations/04c25180a771434f987b11b00d15c7f8/slide_55.jpg){kind=link}
{kind=link}
{kind=link}