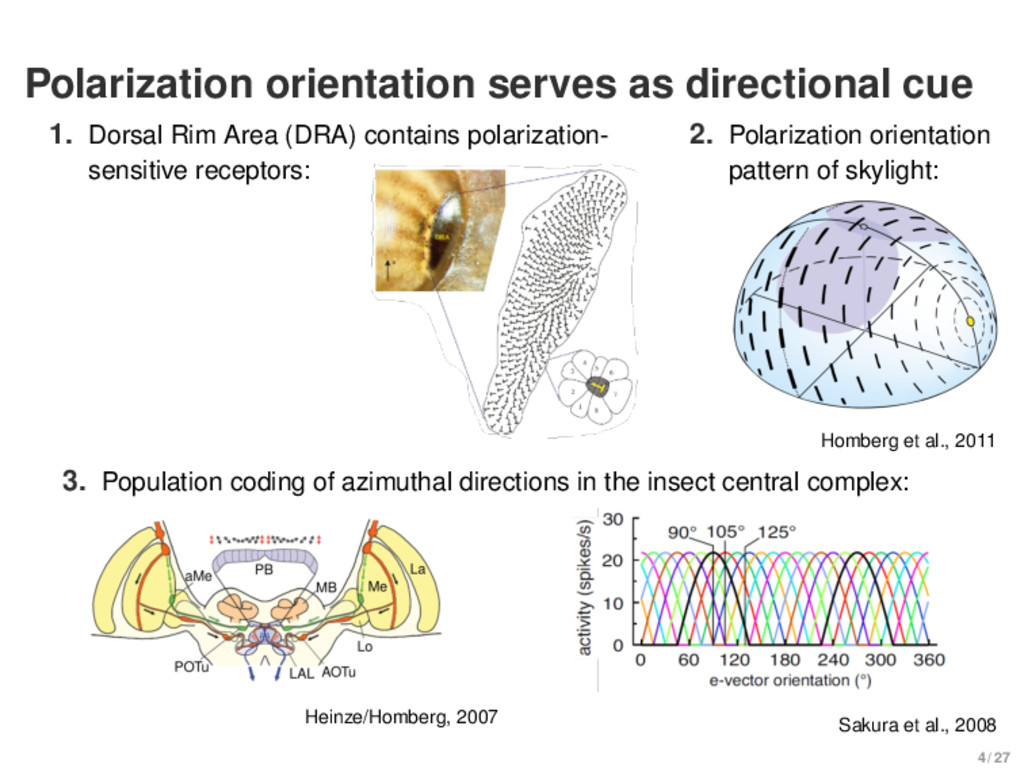
(2007). Evolving a neural model of insect path integration. Adaptive Behavior, 15(3):273–287. Heinze, S. and Homberg, U. (2007). Maplike representation of celestial e-vector orientations in the brain of an insect. Science, 315(5814):995–997. Homberg, U., Heinze, S., Pfeiffer, K., Kinoshita, M., and el Jundi, B. (2011). Central neural coding of sky polarization in insects. Philosophical Transactions of the Royal Society B: Biological Sciences, 366(1565):680–687. Kim, D. and Lee, J. (2011). Path integration mechanism with coarse coding of neurons. Neural Processing Letters, 34(3):277–291. Müller, M. and Wehner, R. (1988). Path integration in desert ants, cataglyphis fortis. Proceedings of the National Academy of Sciences, 85(14):5287–5290. Sakura, M., Lambrinos, D., and Labhart, T. (2008). Polarized skylight navigation in insects: Model and electrophysiology of e-vector coding by neurons in the central complex. Journal of Neurophysiology, 99(2):667–682. Wehner, R. (2003). Desert ant navigation: how miniature brains solve complex tasks. Journal of Comparative Physiology A, 189(8):579–588. Wehner, R. and Wehner, S. (1986). Path integration in desert ants. approaching a long-standing puzzle in insect navigation. Monitore Zoologico Italiano - Italian Journal of Zoology, 20(3):309–331. Wehner, R. and Wehner, S. (1990). Insect navigation: use of maps or ariadne’s thread? Ethology Ecology & Evolution, 2(1):27–48. 17 / 27
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}