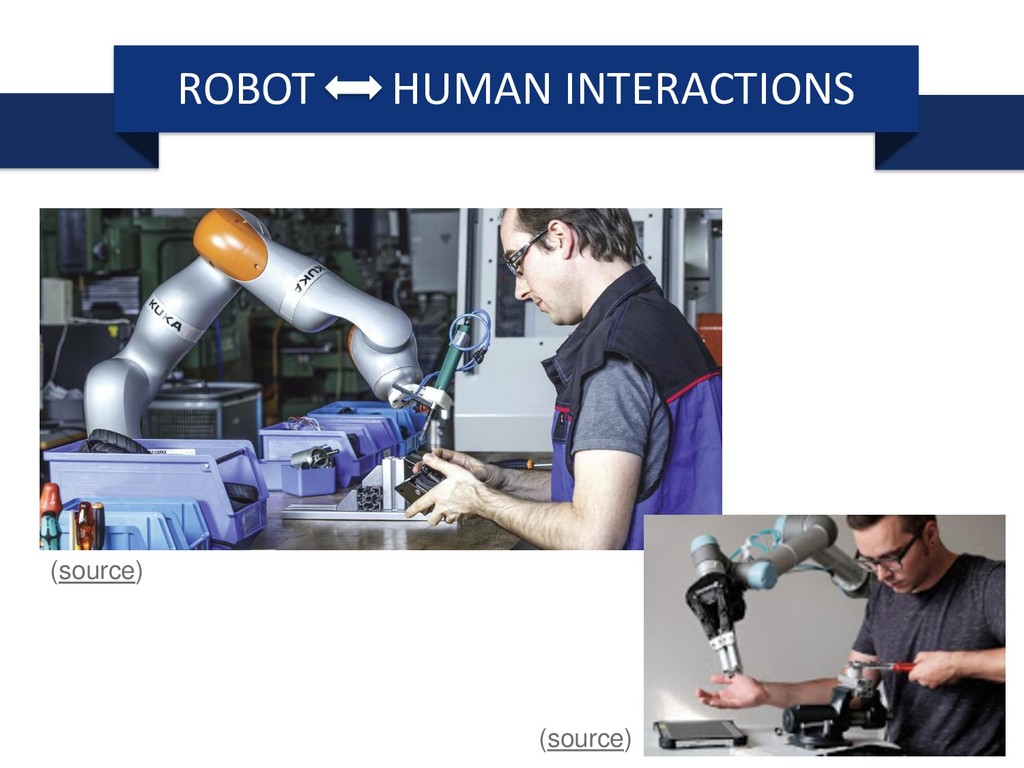
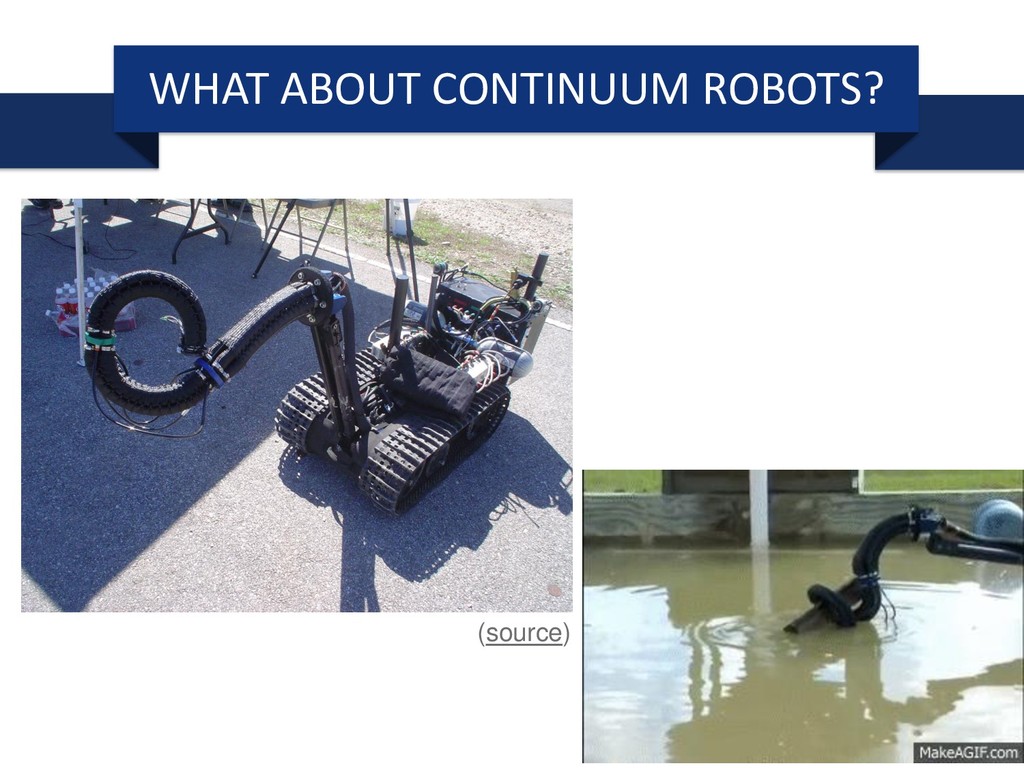
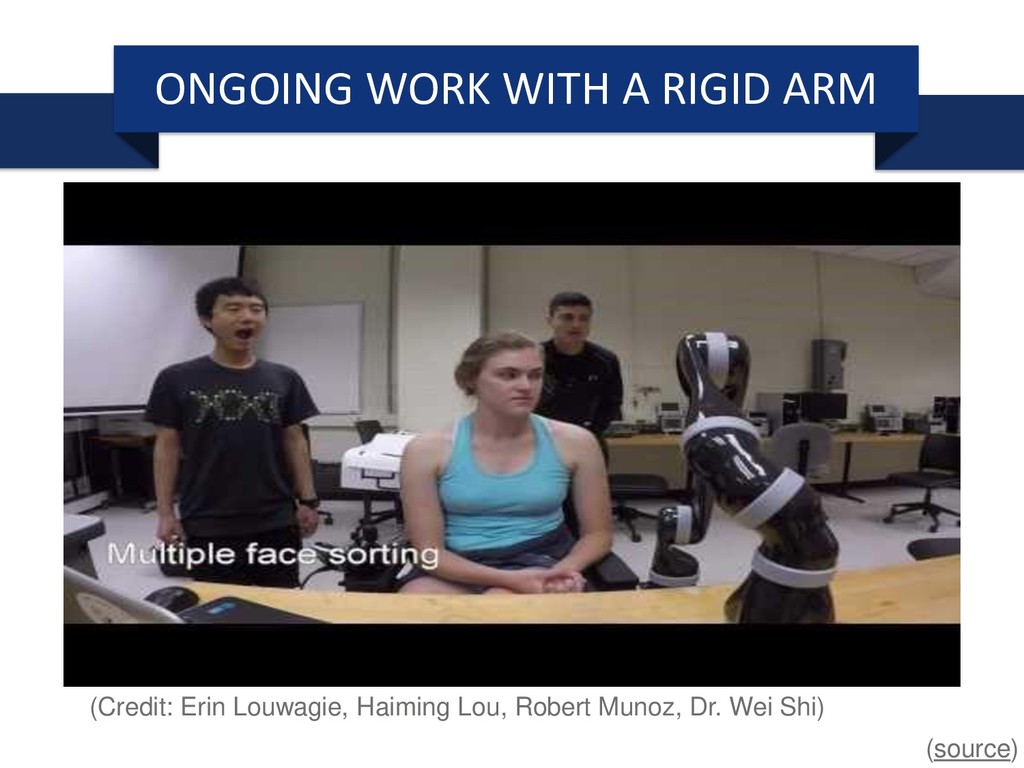
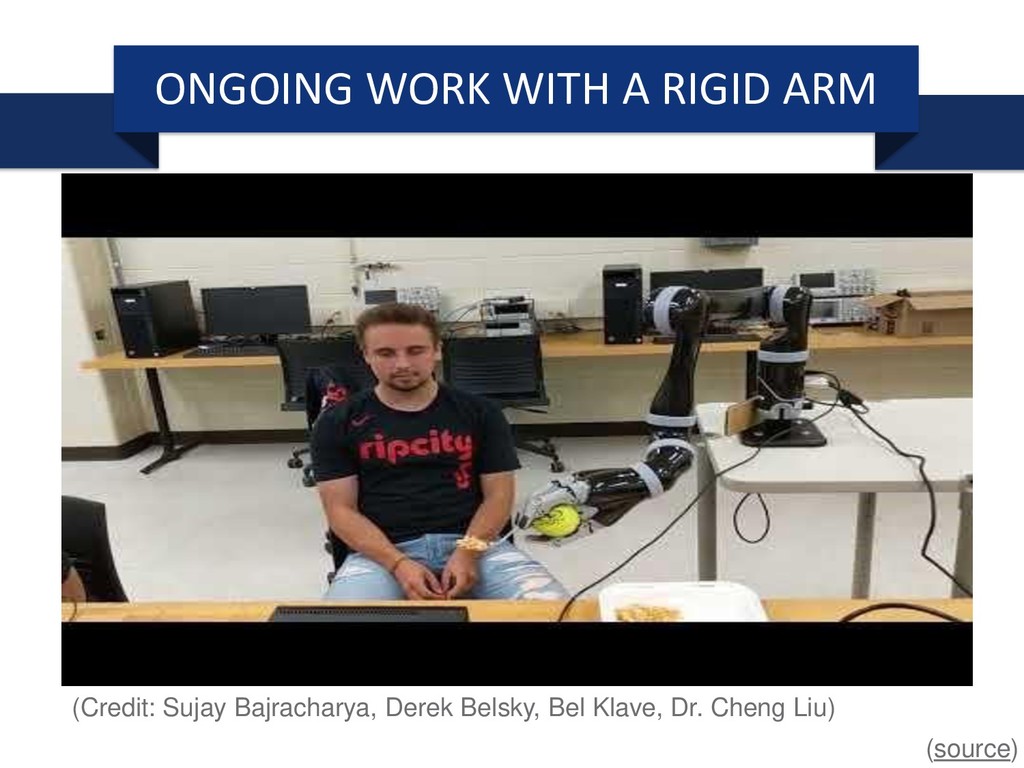
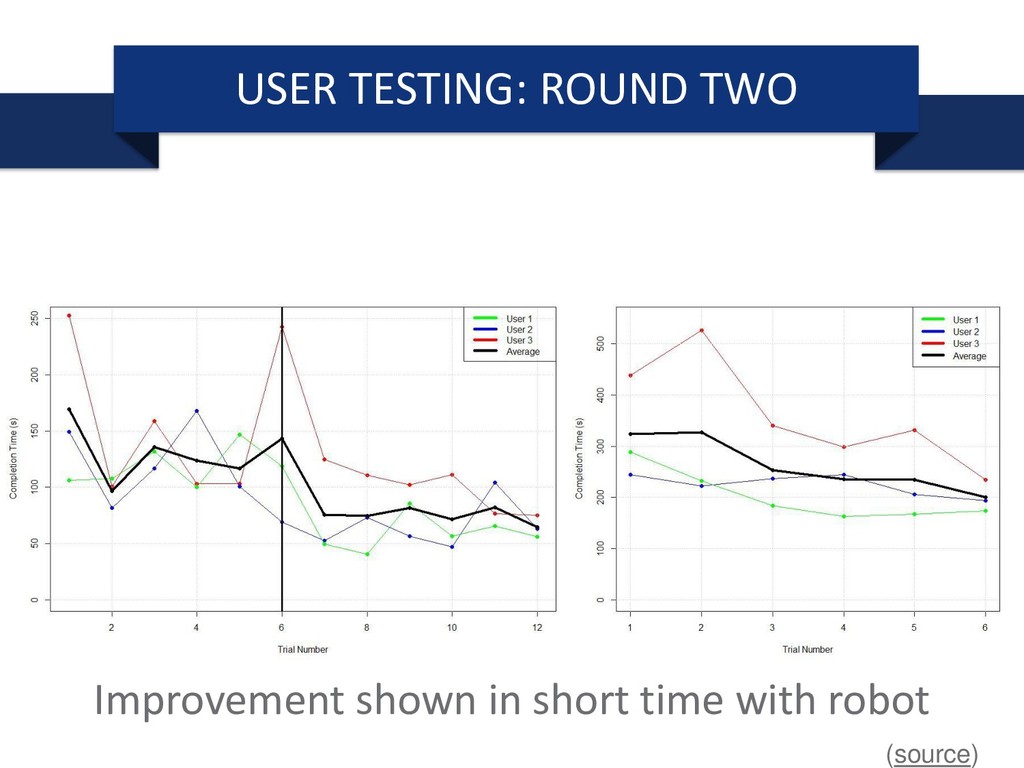
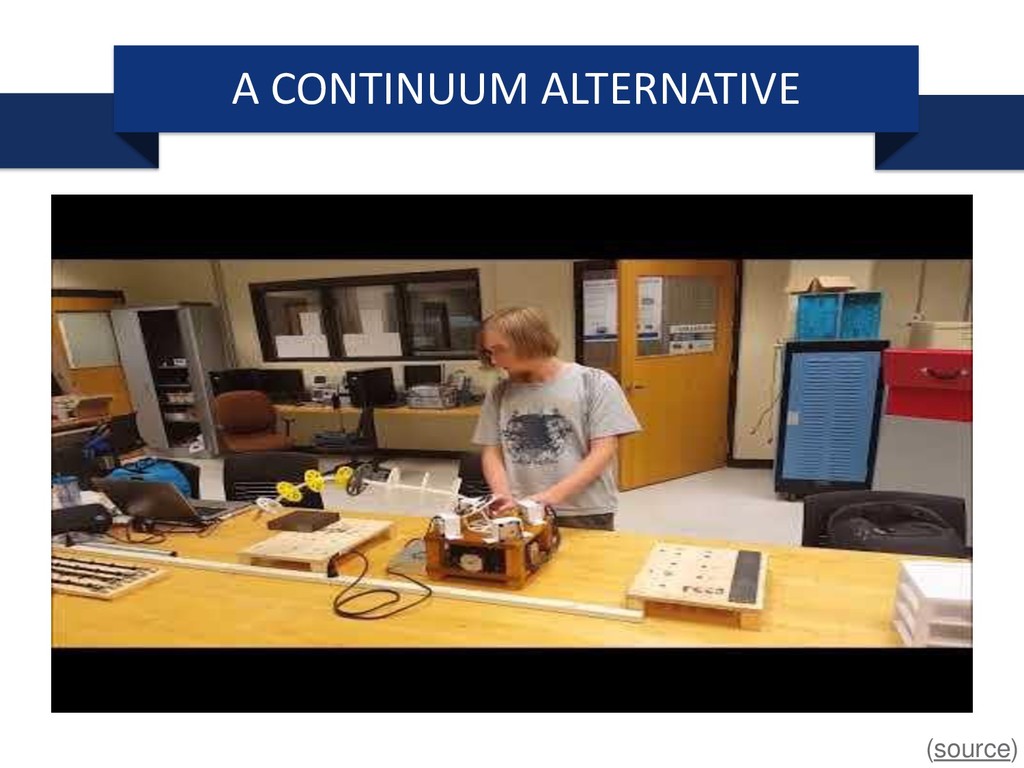
The application of robotics to assistive technology has the potential to precipitate individual users’ ability to regain independence in accomplishing the activities of daily living (ADLs) and/or returning to the workforce. At the same time, both real and perceived barriers exist to broader acceptance of robotic technology, which might include a host of physical and mental barriers. Our work is targeted at both understanding how potential users interact with robotic devices, physically and cognitively, and developing novel robotic instruments and technologies to better integrate in the users home and workplace.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}