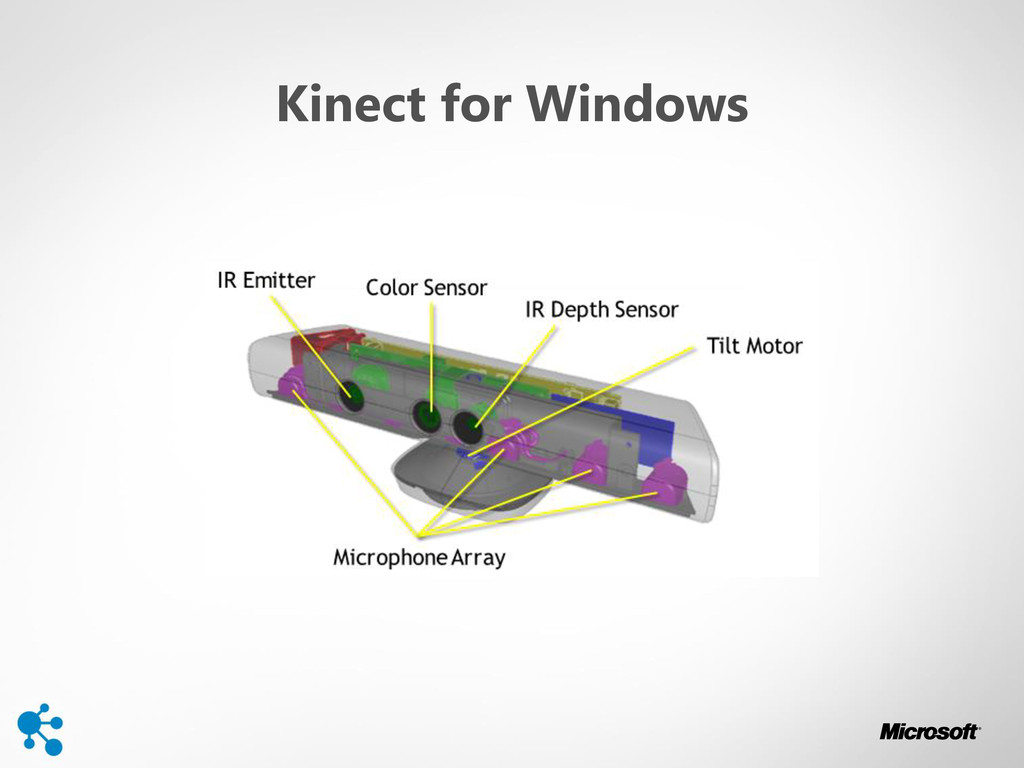
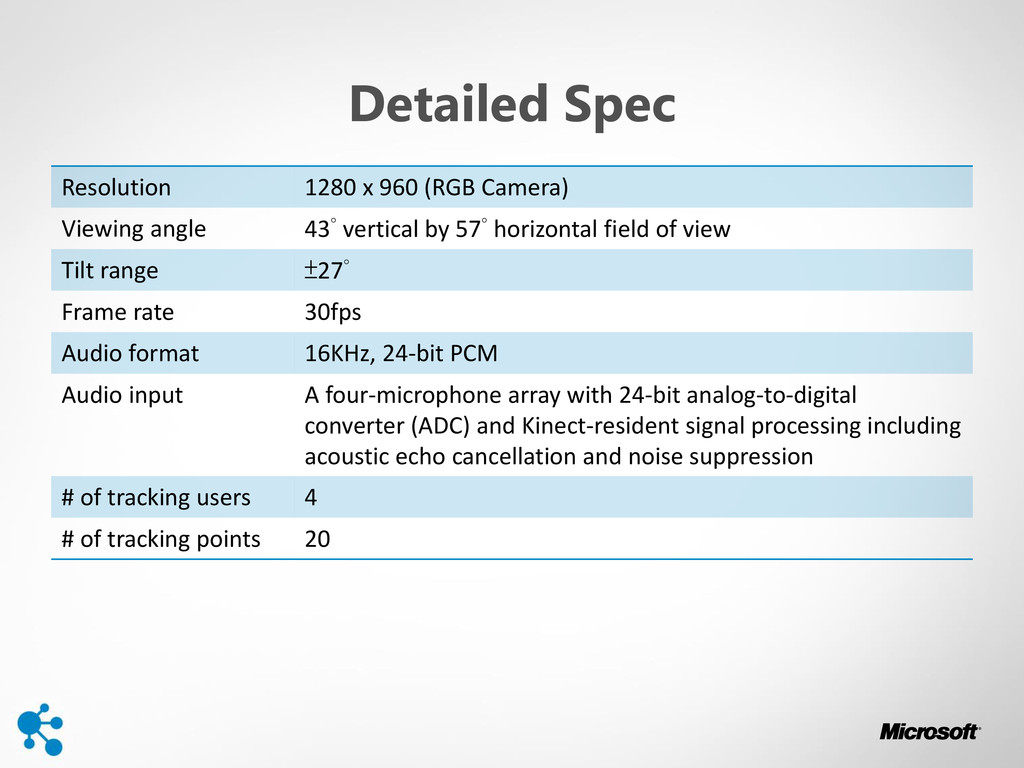
43° vertical by 57° horizontal field of view Tilt range ±27° Frame rate 30fps Audio format 16KHz, 24-bit PCM Audio input A four-microphone array with 24-bit analog-to-digital converter (ADC) and Kinect-resident signal processing including acoustic echo cancellation and noise suppression # of tracking users 4 # of tracking points 20
camera to see objects as close as 40 centimeters in front of the device without losing accuracy or precision, with graceful degradation out to 3 meters. • Shortening USB cable and small dongle • Support and software updates
2010 • C++ or C# (w/ .NET 4.0) • Kinect for Windows SDK (1.5) • (optional) DirectX • (optional) Microsoft Speech Platform Runtime • (optional) Kinect for Windows Language Pack
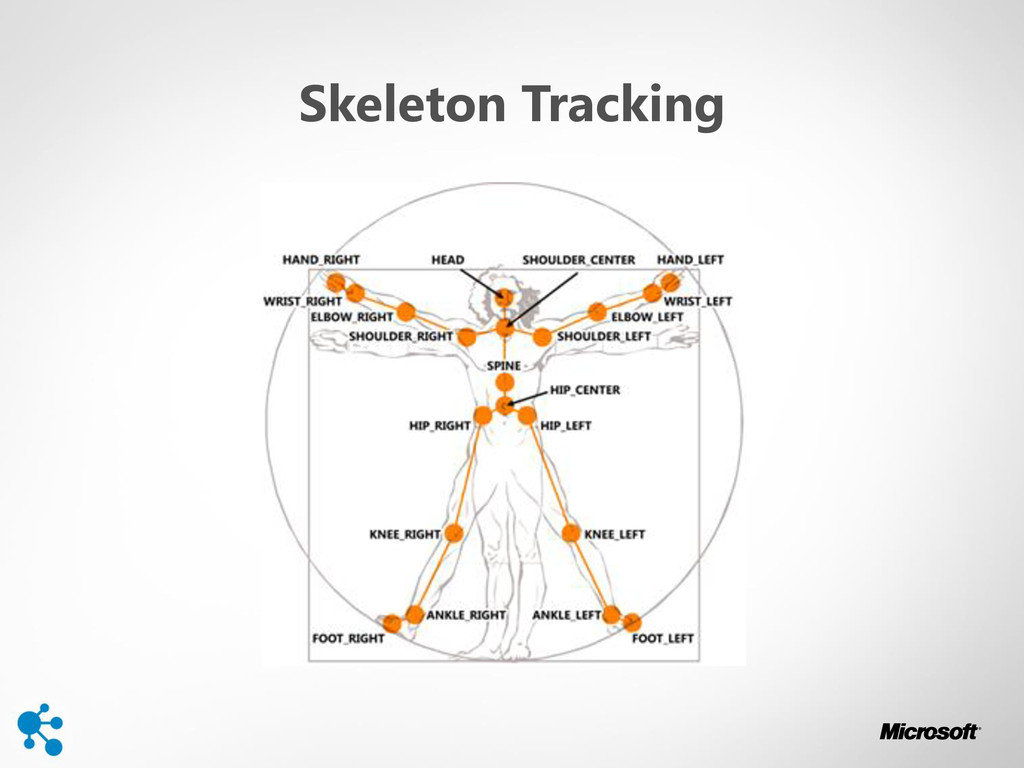
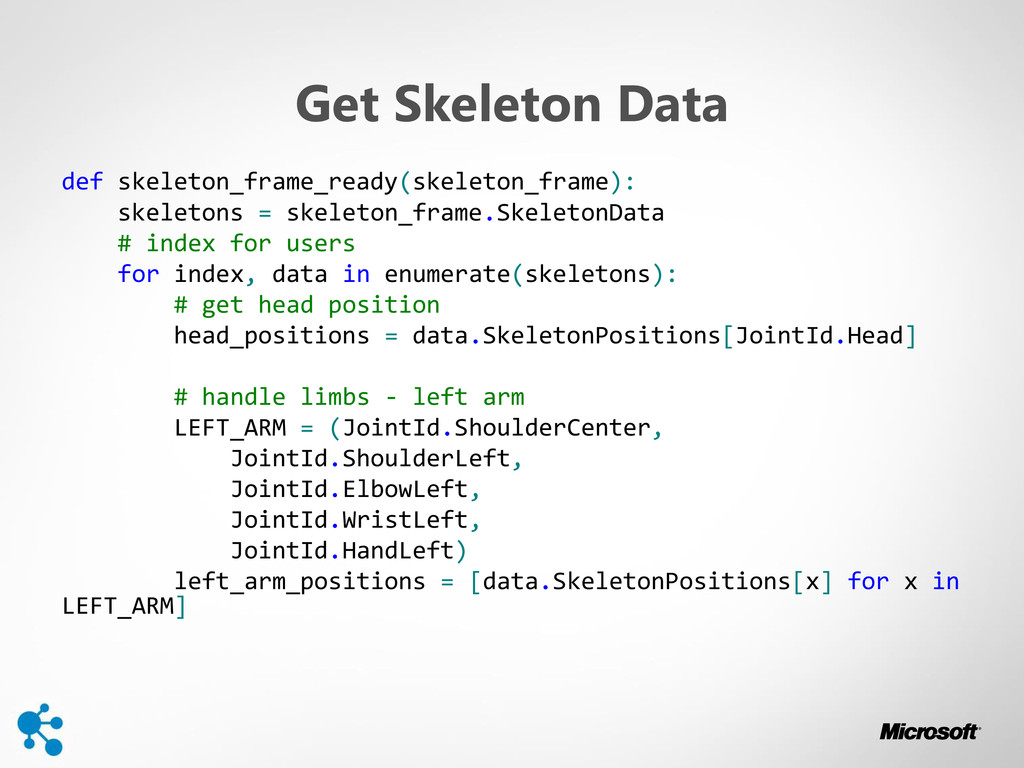
for users for index, data in enumerate(skeletons): # get head position head_positions = data.SkeletonPositions[JointId.Head] # handle limbs - left arm LEFT_ARM = (JointId.ShoulderCenter, JointId.ShoulderLeft, JointId.ElbowLeft, JointId.WristLeft, JointId.HandLeft) left_arm_positions = [data.SkeletonPositions[x] for x in LEFT_ARM]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}