TMPA-2017: Tools and Methods of Program Analysis
3-4 March, 2017, Hotel Holiday Inn Moscow Vinogradovo, Moscow
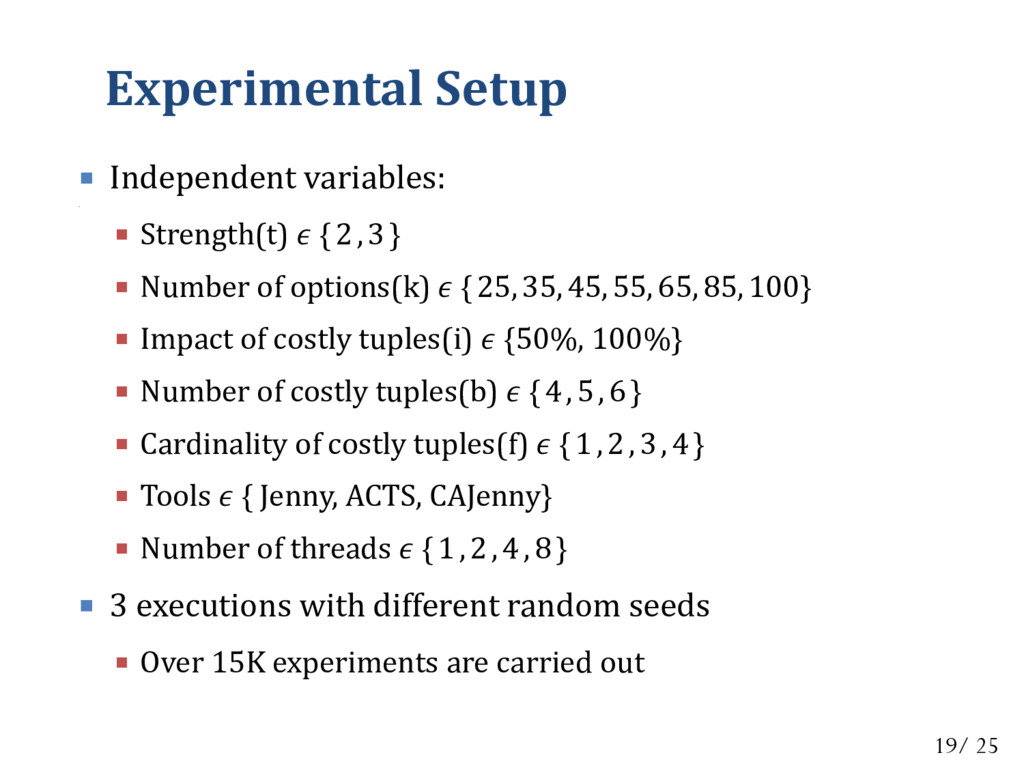
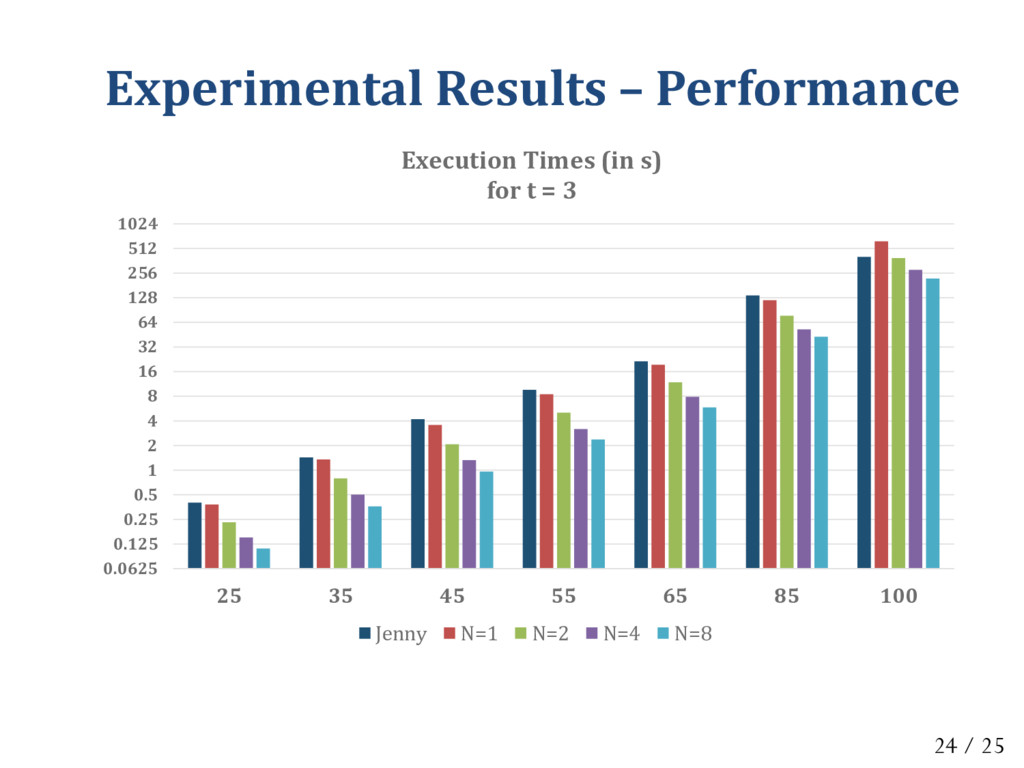
Generating Cost Aware Covering Arrays For Free
Mustafa Kemal Tas, Hanefi Mercan, Gülşen Demiröz, Kamer Kaya, Cemal Yilmaz, Sabanci University
For video follow the link: https://youtu.be/Wkdd4A0rRjE
Would like to know more?
Visit our website:
www.tmpaconf.org
www.exactprosystems.com/events/tmpa
Follow us:
https://www.linkedin.com/company/exactpro-systems-llc?trk=biz-companies-cym
https://twitter.com/exactpro
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}