第58回 コンピュータビジョン勉強会@関東 深層学習+3D論文読み会 にて、
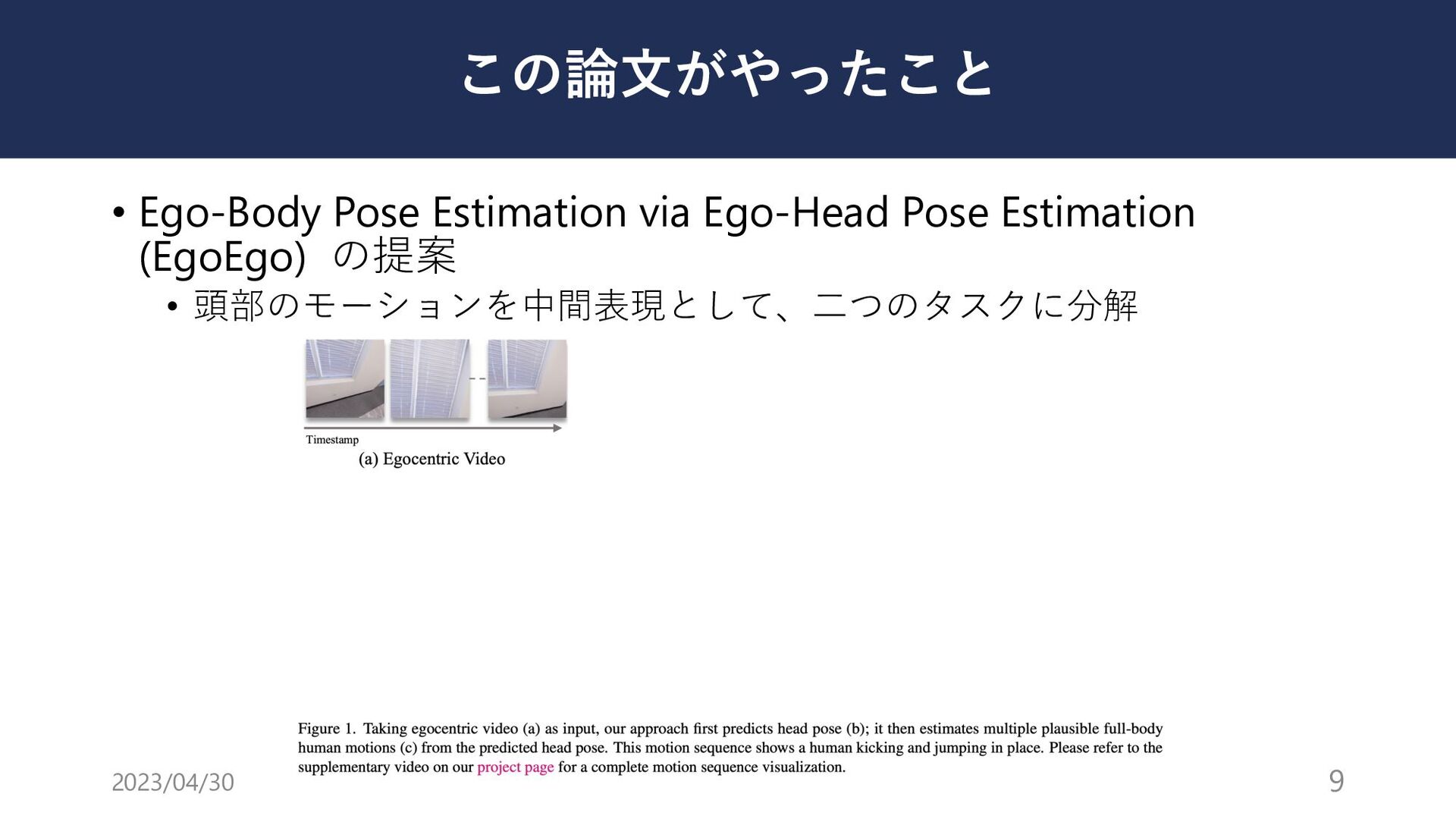
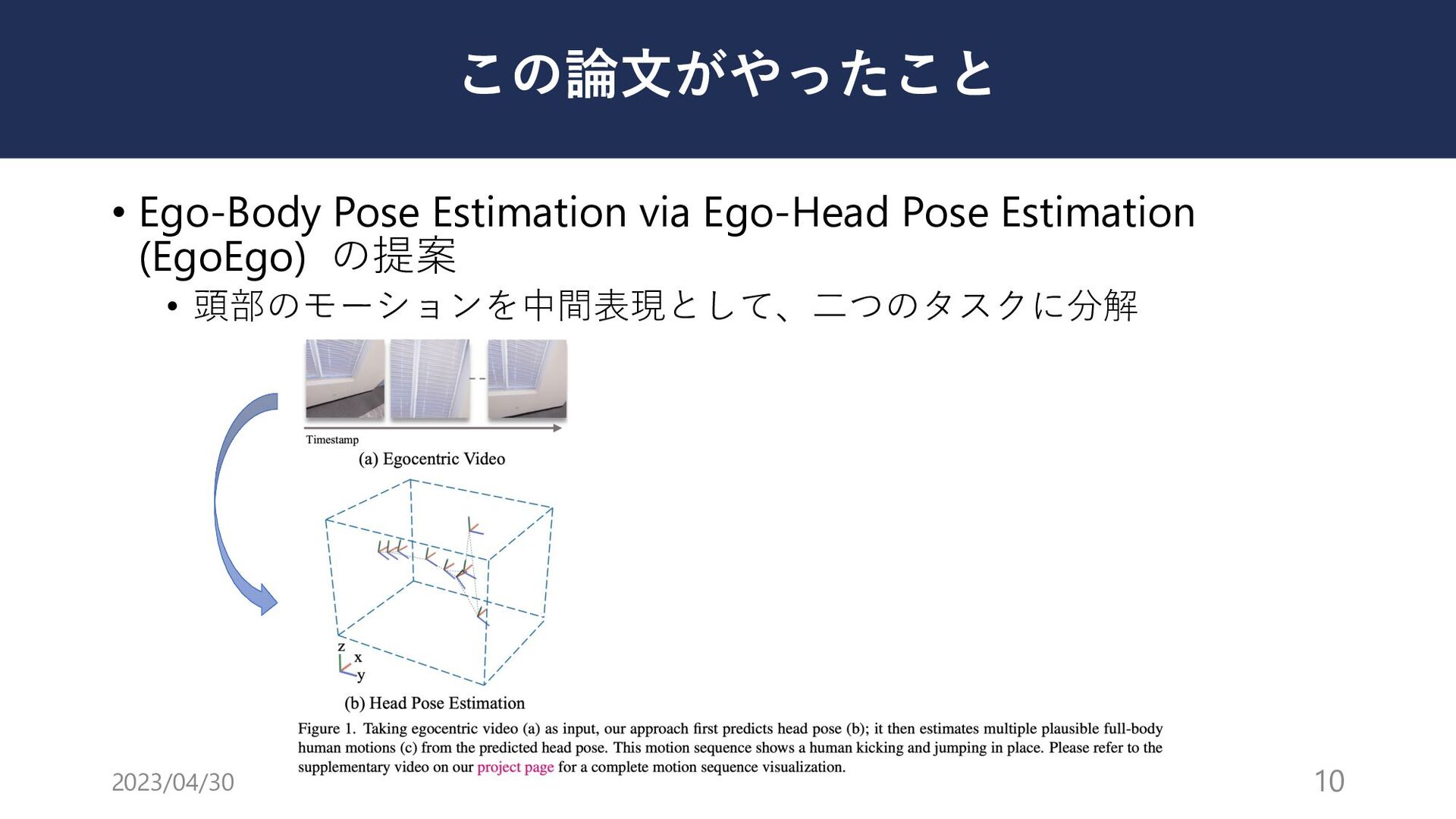
"Ego-Body Pose Estimation via Ego-Head Pose Estimation" [Li et al., CVPR 2023]
のご紹介をさせていただきました。
◆イベント詳細 URL:
https://kantocv.connpass.com/event/278291/
◆発表日:
2023/04/30
◆紹介論文のプロジェクトページ
https://lijiaman.github.io/projects/egoego/
◆紹介論文の preprint (arXiv)
https://arxiv.org/abs/2212.04636
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![今回ご紹介する論⽂ ([Project Page]) 2023/04/30 6](https://files.speakerdeck.com/presentations/e5304f618497498db2e9861fa98d4d99/slide_5.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
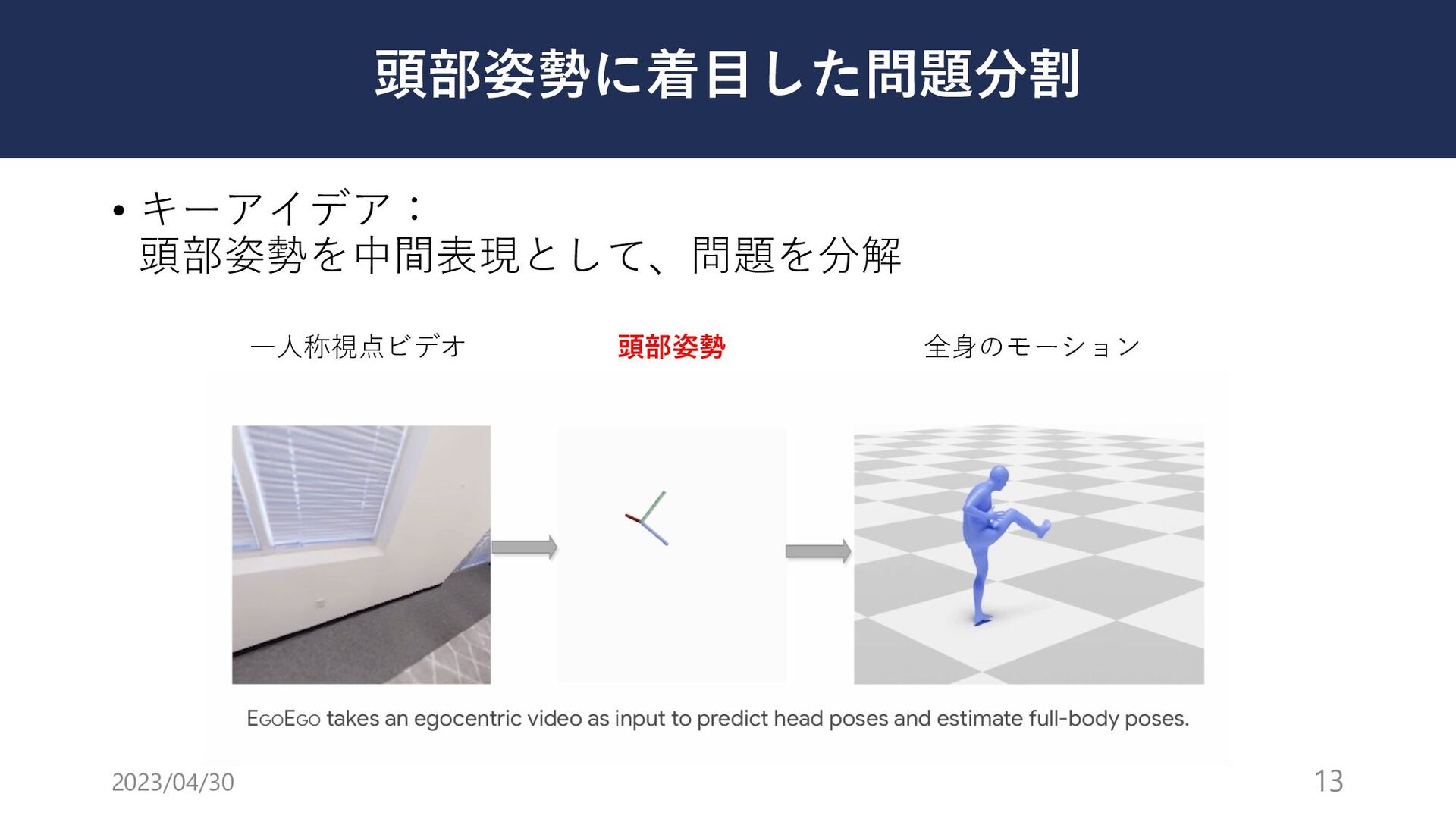
![頭部姿勢に着⽬した問題分割 • ⼈間は、⽇常的な活動のほとんどにおいて、頭を⾝体の重⼼と ⼀致させるように安定させる能⼒を持つ [Keshner and Peterson, 1988] → ⾝体のモーションを推定する上で、頭部の情報が有⽤](https://files.speakerdeck.com/presentations/e5304f618497498db2e9861fa98d4d99/slide_13.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![なぜ、回転は3次元ではなく6次元か? • [Zhou & Barnes et al., CVPR 2019] •](https://files.speakerdeck.com/presentations/e5304f618497498db2e9861fa98d4d99/slide_46.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}