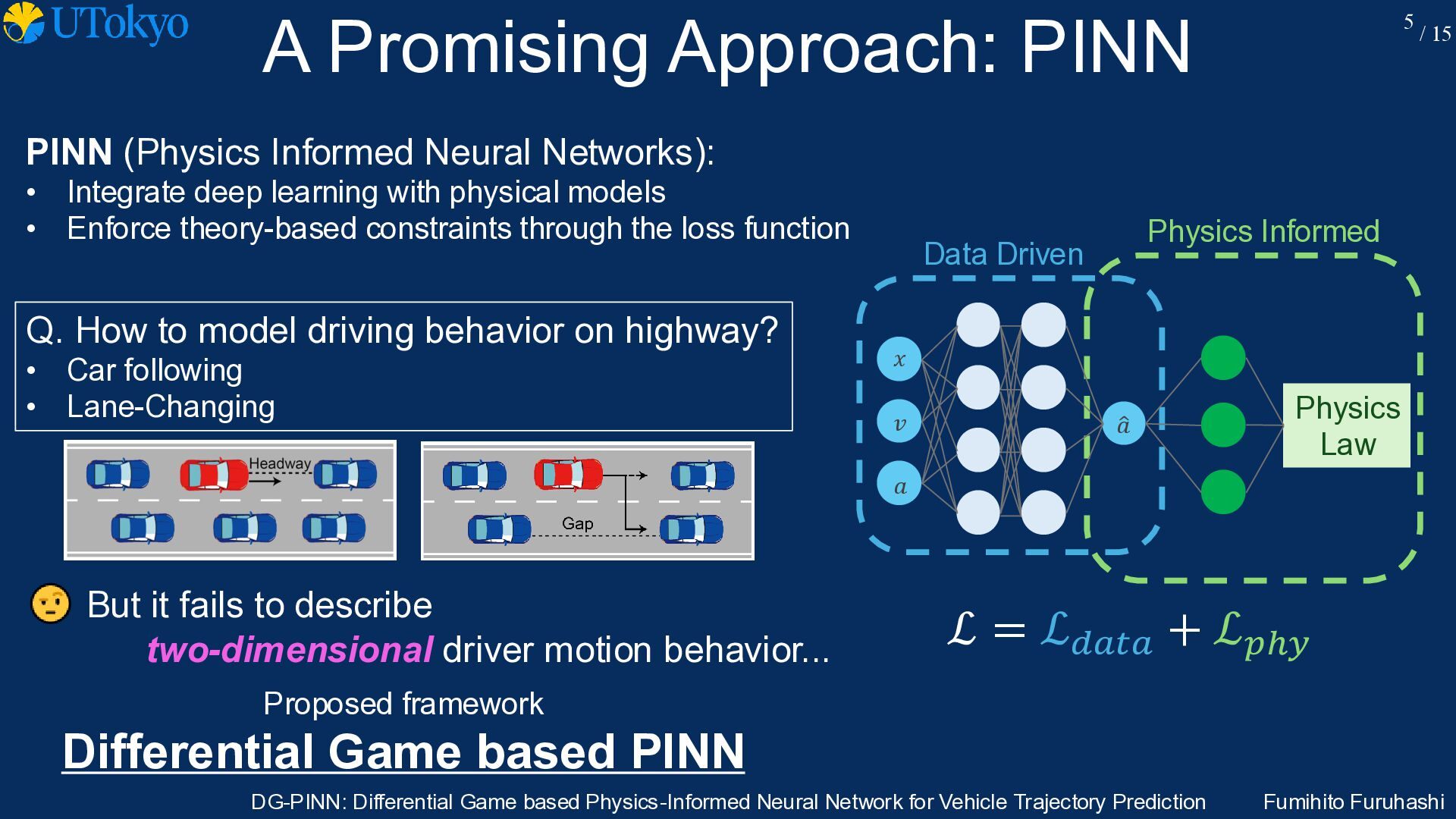
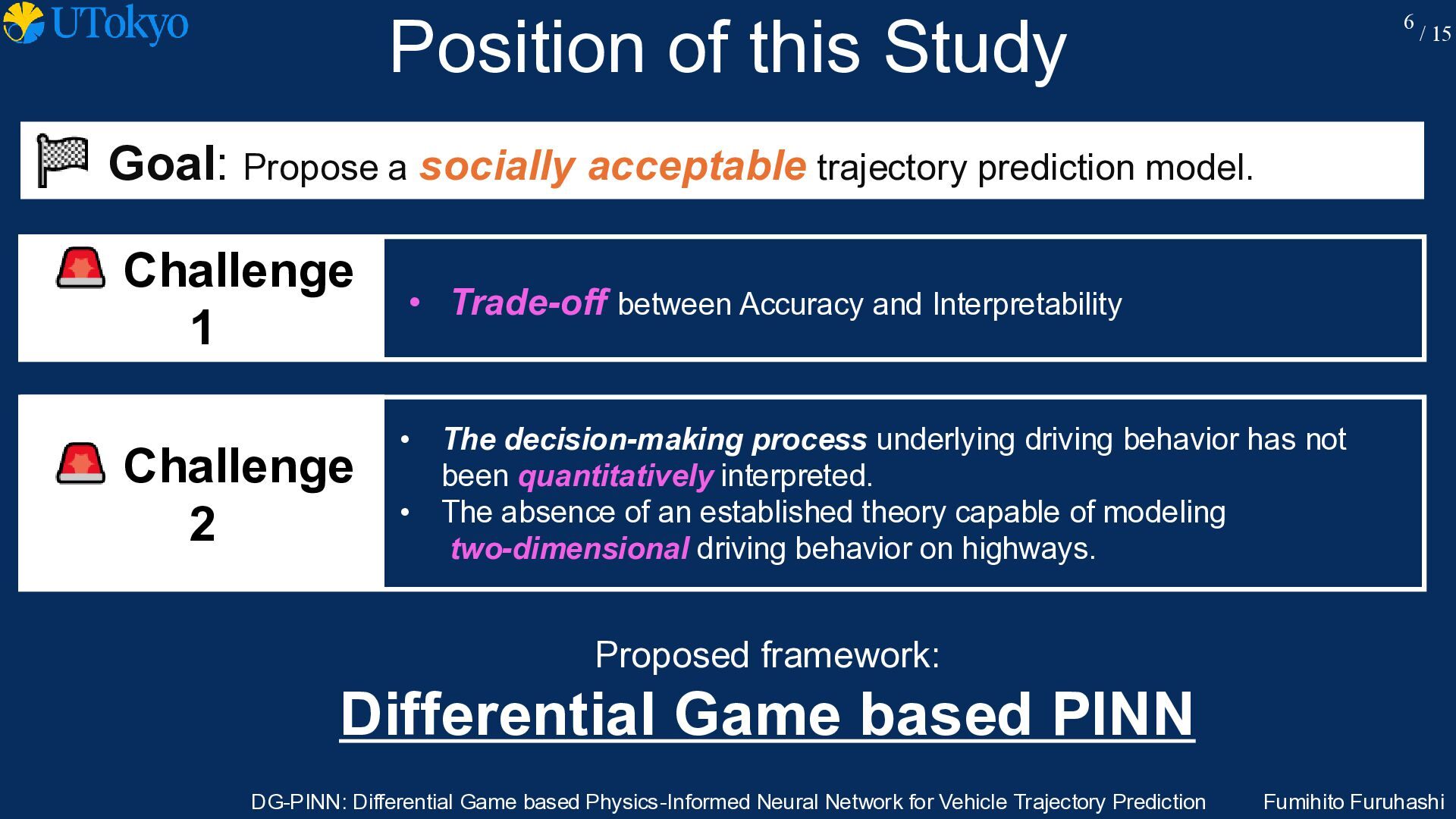
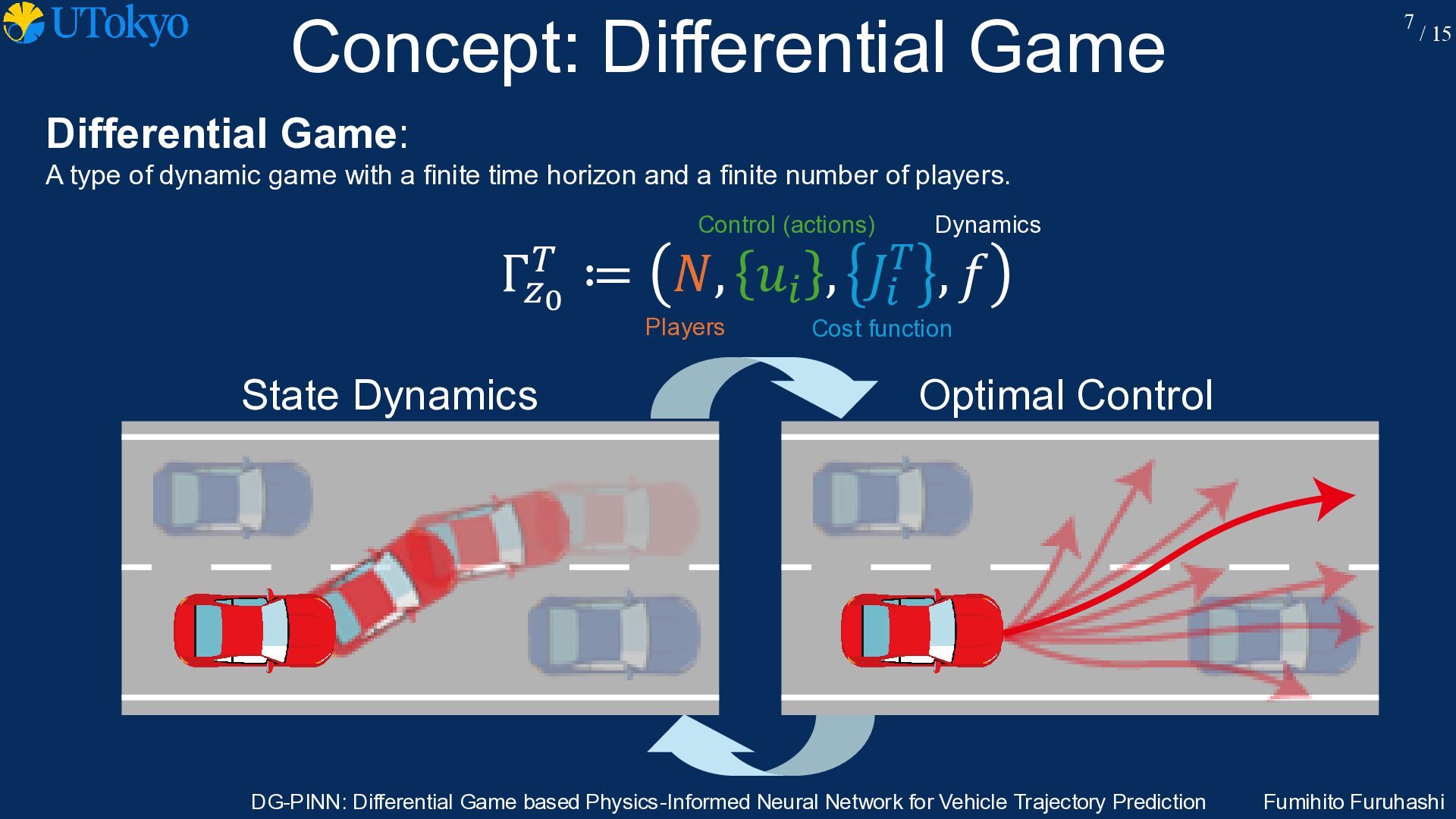
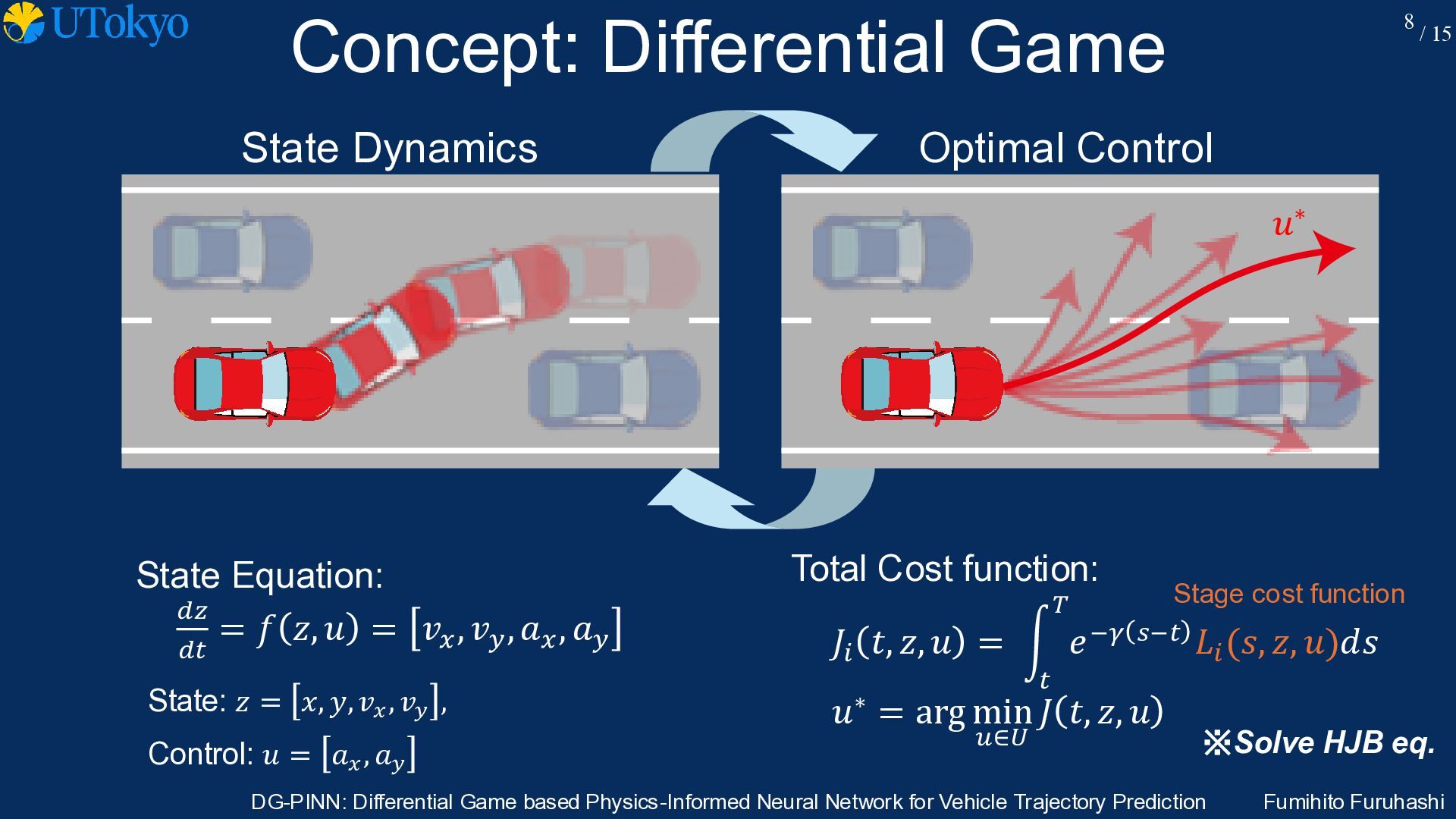
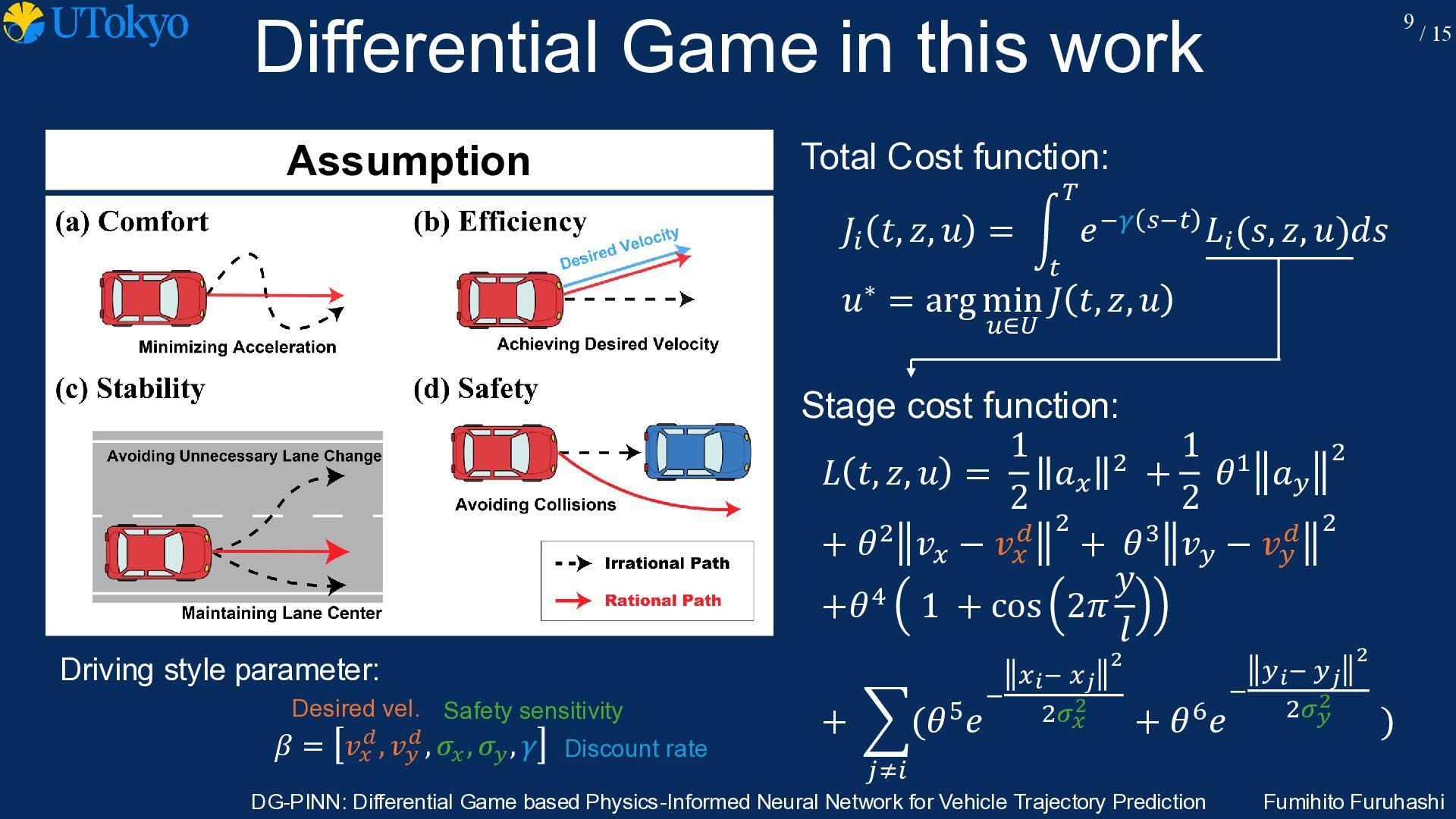
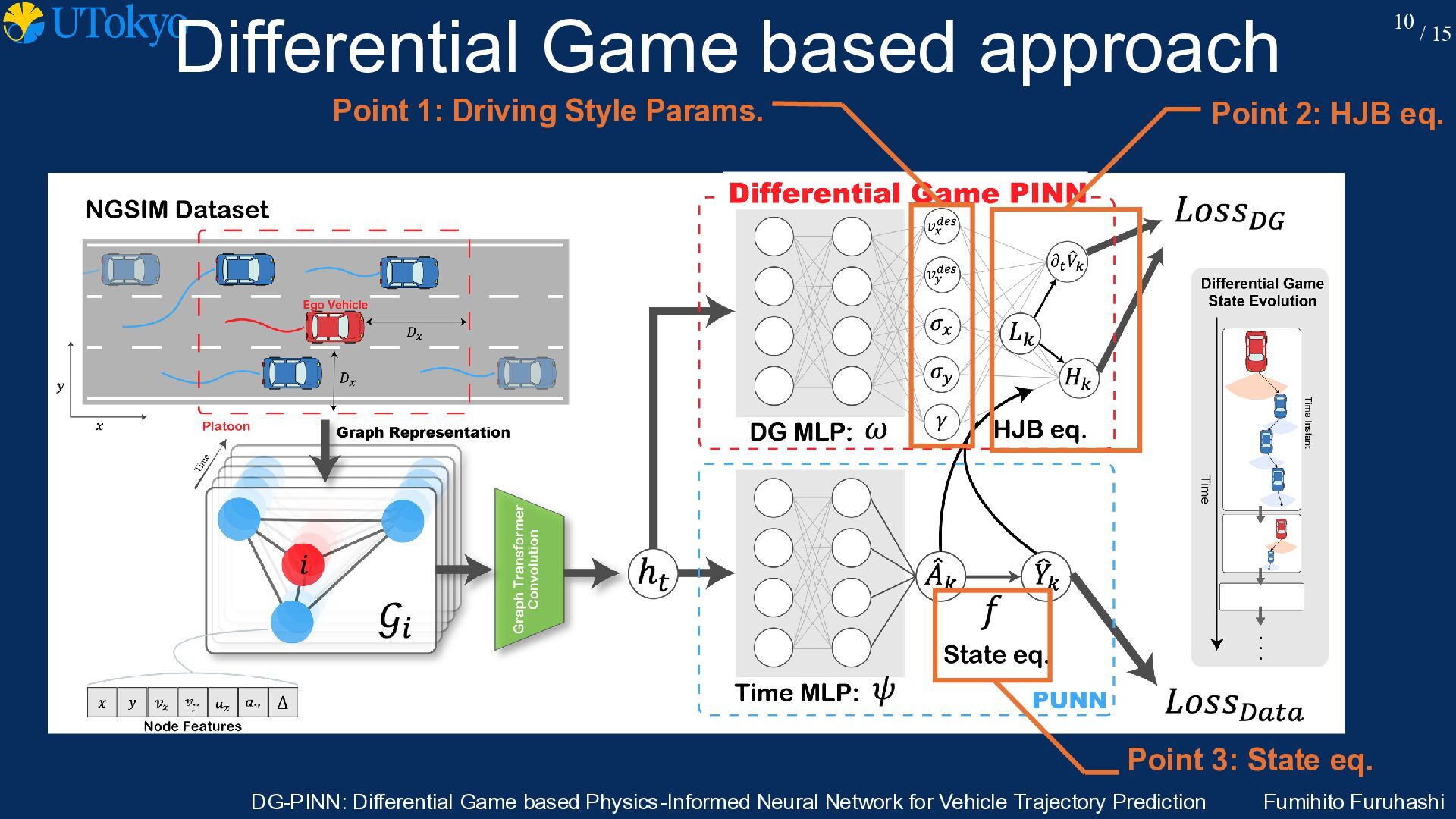
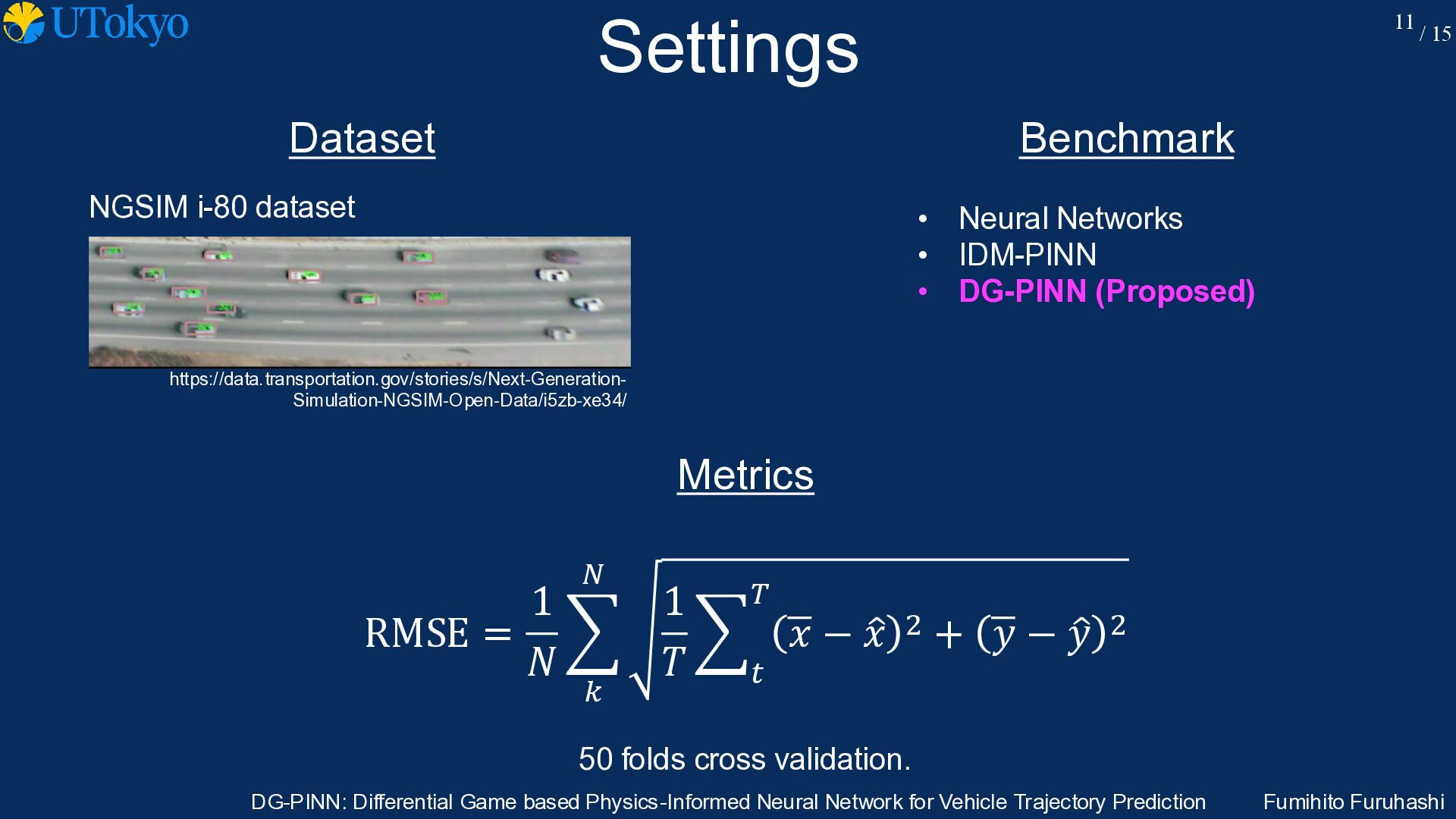
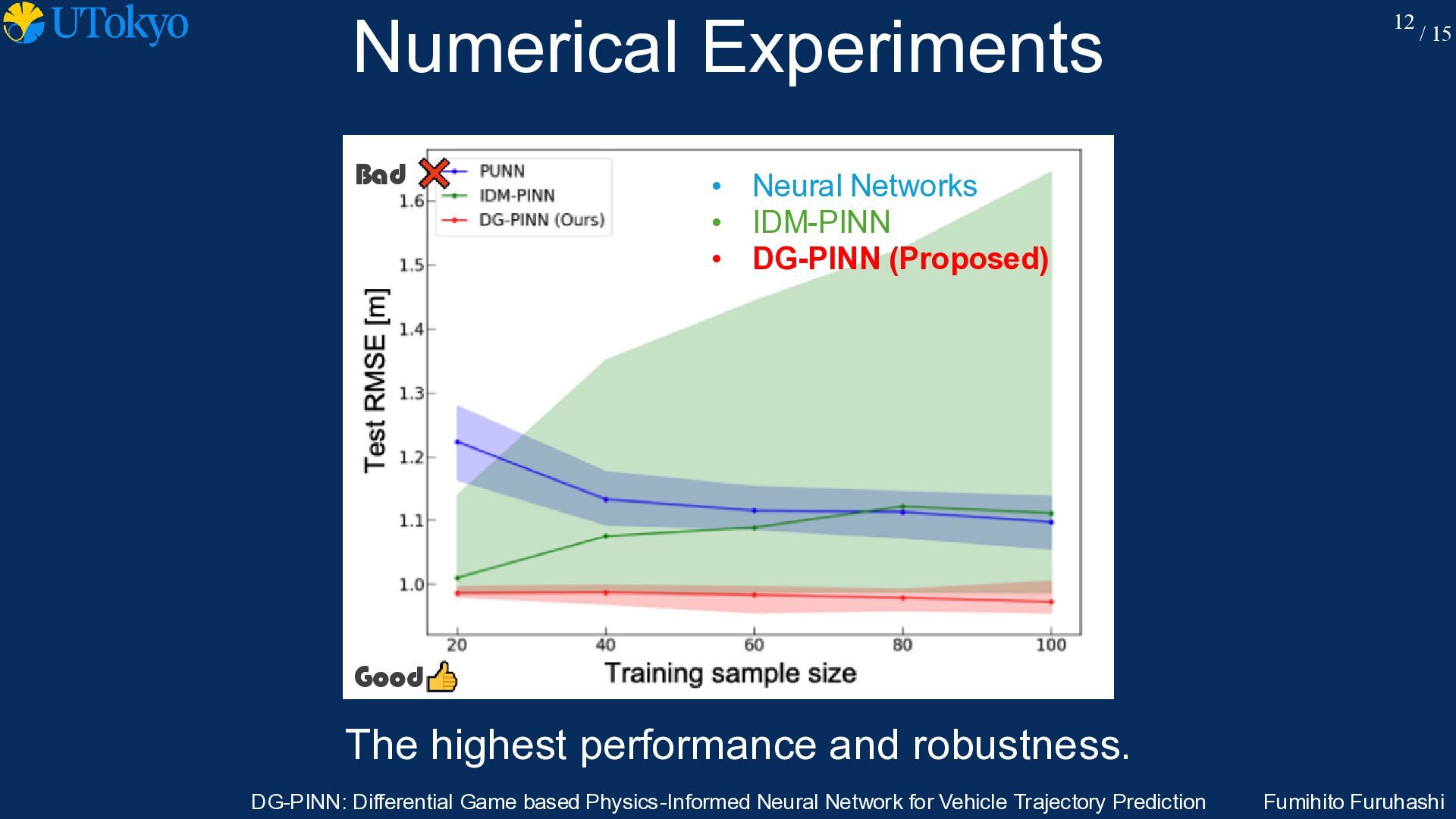
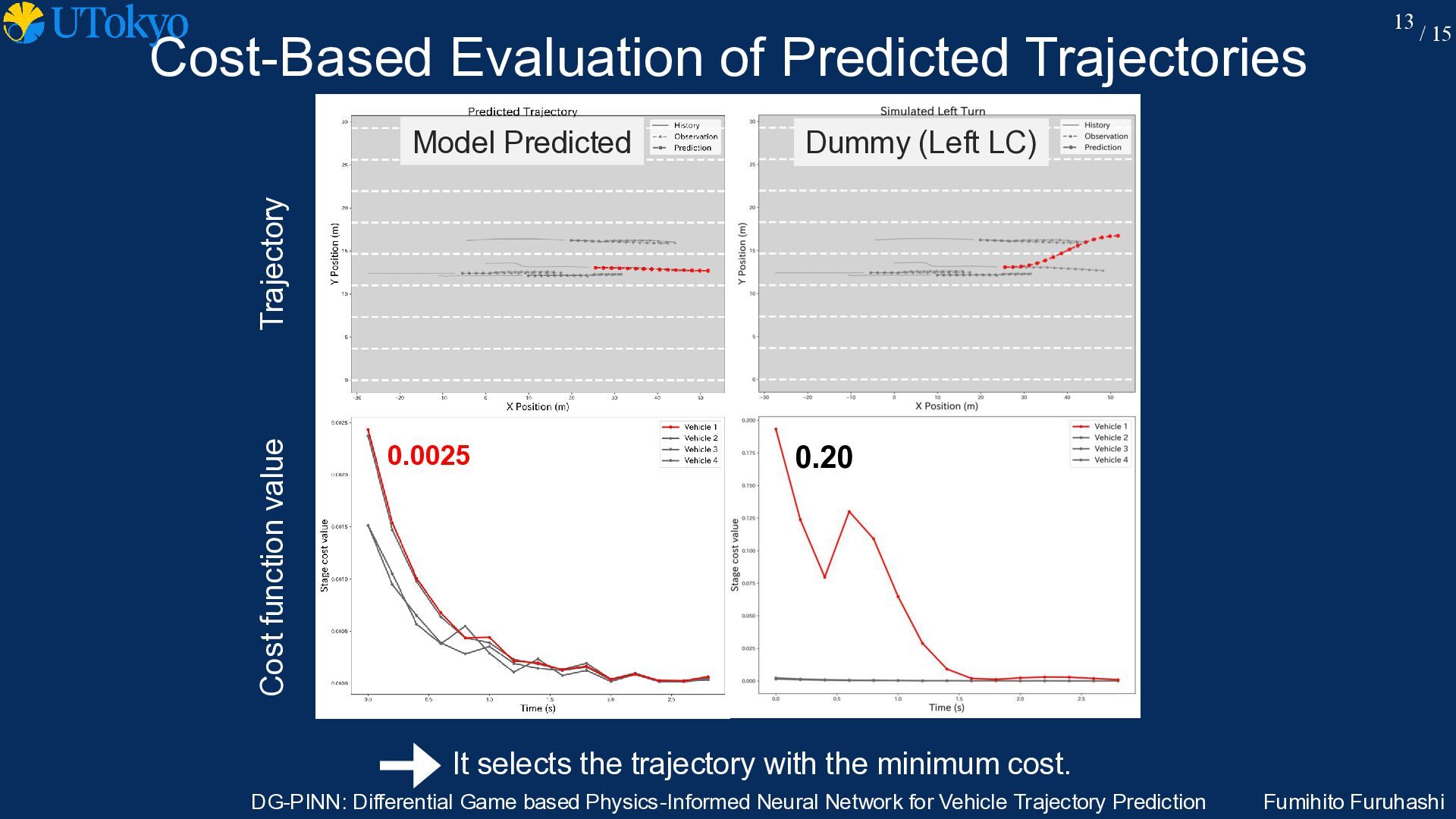
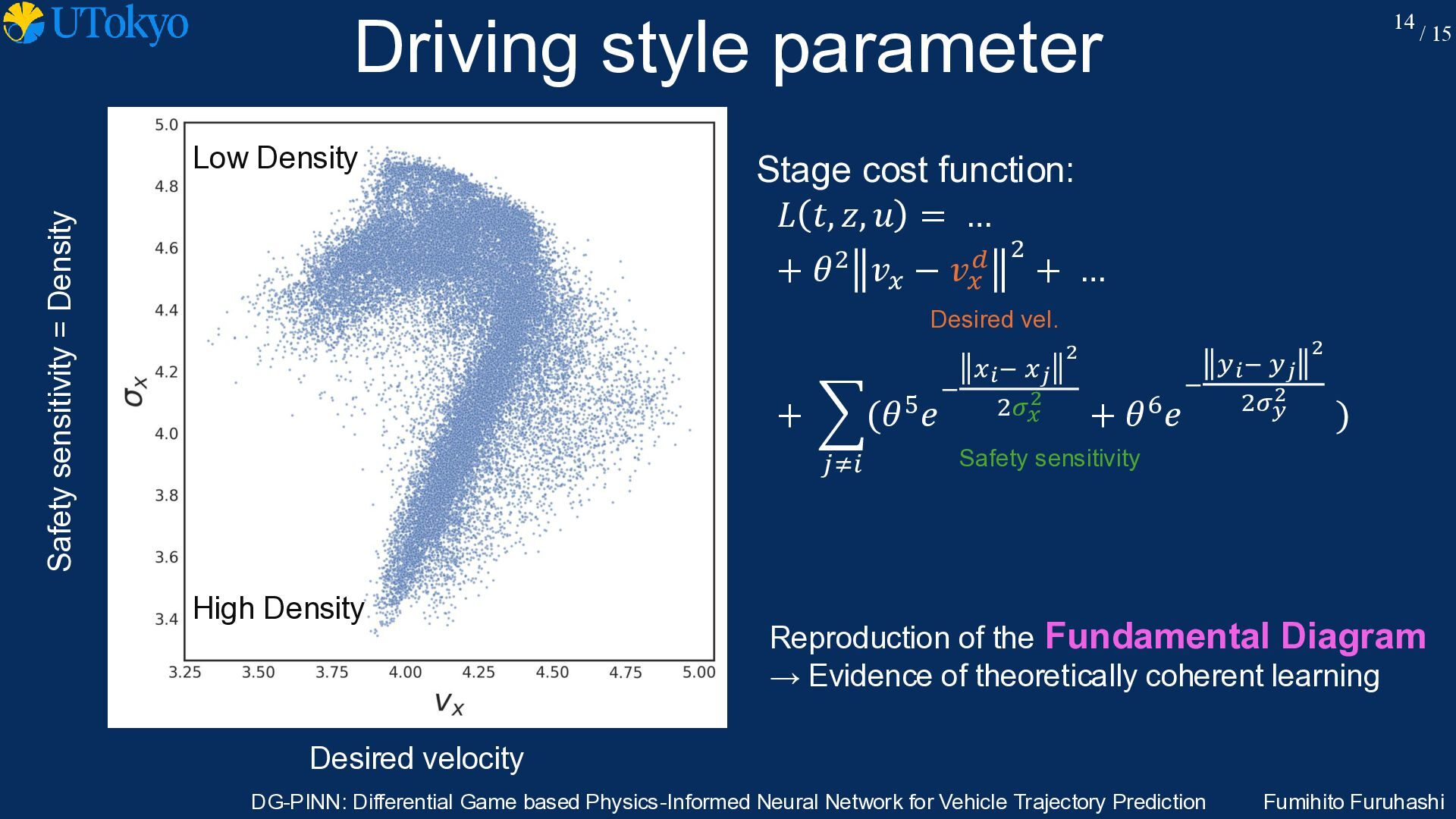
This paper introduces the Differential-Game based Physics-Informed Neural Network (DG-PINN), a trajectory-prediction model that embeds a multi-agent differential-game formulation into a physics-informed neural network. By treating each vehicle as a strategic agent, DG-PINN simultaneously captures inter-vehicle interactions and individual utilities, thereby unifying longitudinal car-following and lateral lane-changing behaviors within a single, interpretable framework. Physical laws derived from the Hamilton-Jacobi-Bellman equations are incorporated as loss regularizers, enabling the model to retain the data-efficiency and interpretability of physics-based methods while leveraging the representational power of deep learning. We evaluate DG-PINN on the NGSIM I-80 highway dataset under varying training-sample regimes (20-100 sequences) and compare it with constant-velocity/acceleration baselines, a Physics Uninformed Neural Network (PUNN), and an IDM-based PINN. DG-PINN achieves the lowest root-mean-square error, average displacement error, and final displacement error across all sample sizes, outperforming IDM-PINN and PUNN by up to 19 % in low-data settings while exhibiting markedly lower variance. Moreover, the learned utility parameters allow quantitative profiling of driver traits—such as safety-mindedness and aggressiveness—and visualize the rationality of observed versus hypothetical maneuvers. The results demonstrate that integrating differential-game theory with PINNs not only improves prediction accuracy and robustness but also yields actionable insights for explainable decision-making in autonomous-vehicle systems.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}