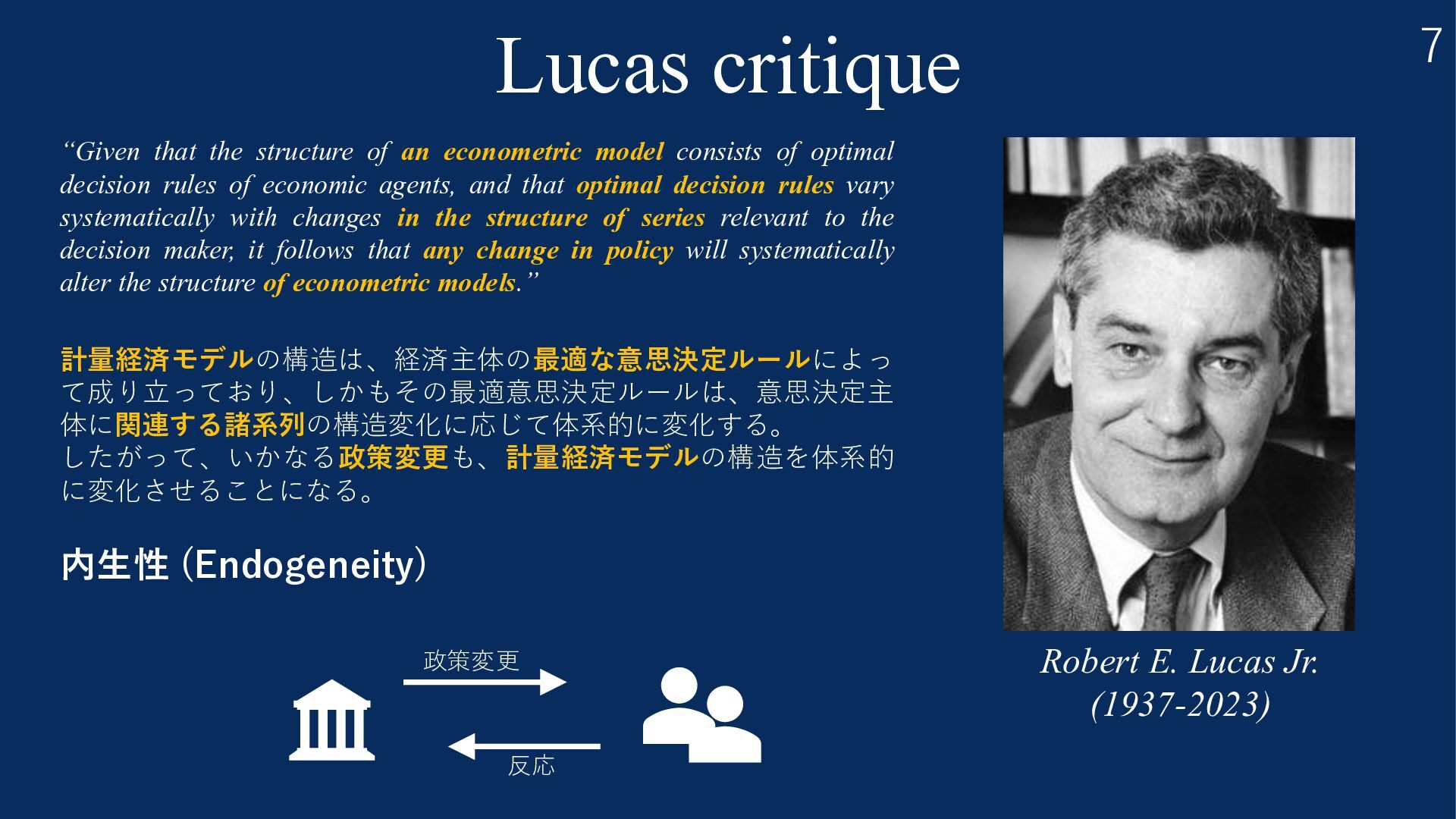
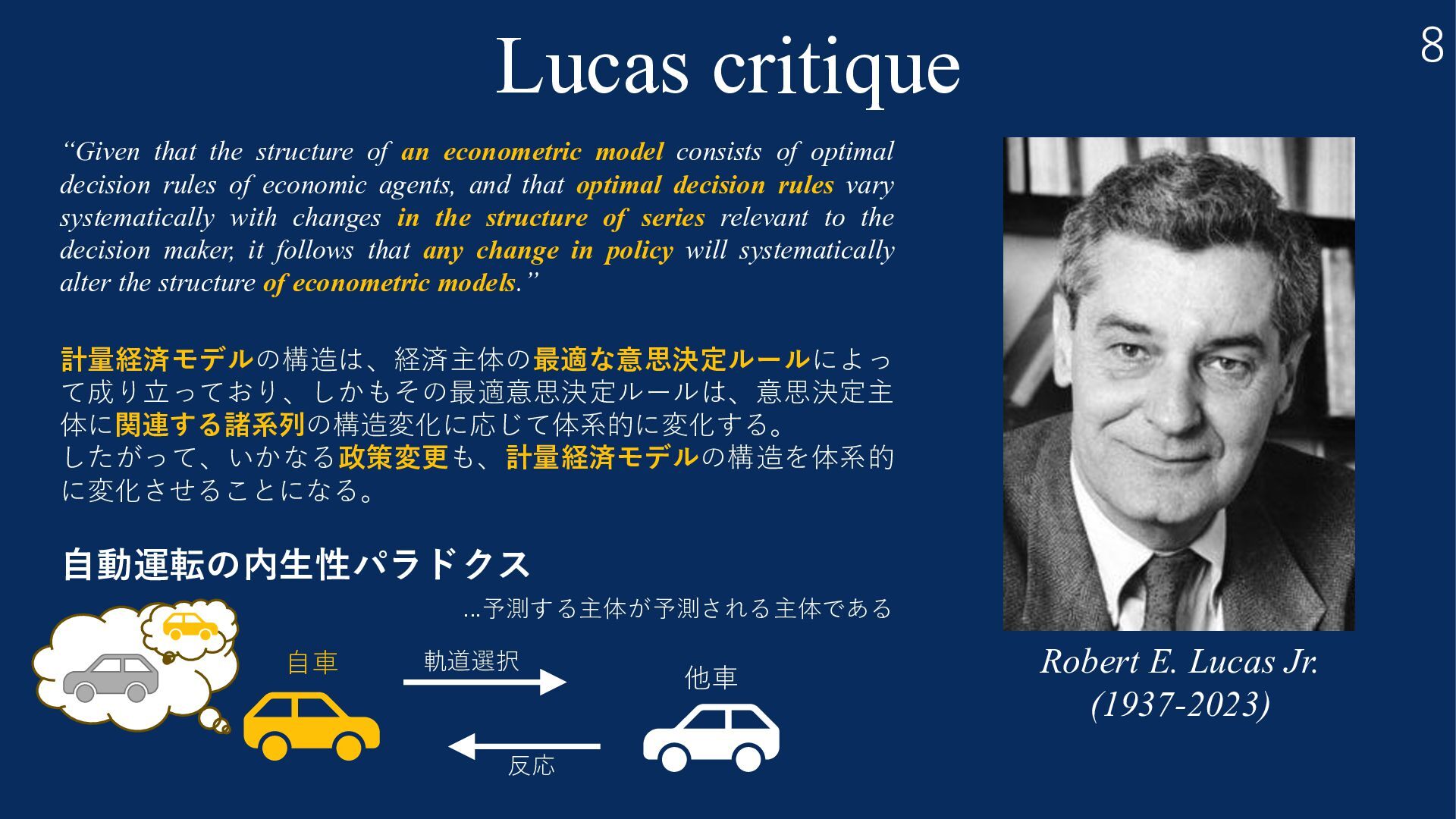
trajectories using time-expanded decision diagram. Transportation Research Part C: Emerging Technologies, Vol. 120, p. 102766, 2020. Serge P. Hoogendoorn and Piet Bovy. Generic driving behavior modeling by differential game theory. In C´ ecile Appert Rolland, Franc¸ois Chevoir, Philippe Gondret, Sylvain Lassarre, Jean-Patrick Lebacque, and Michael Schreckenberg, editors, Traffic and Granular Flow ’07, pp. 321–331, Berlin, Heidelberg, 2009. Springer Berlin Heidelberg. Robert E. Lucas. Econometric policy evaluation: A critique. Vol. 1, pp. 19–46, 1976. Rufus Isaacs. The problem of aiming and evasion. Technical Report RAND-P-642, RAND Corporation, Santa Monica, CA, March 1955. Report Date: 1955-03-14. DTIC Accession Number: AD0604643. Collection: TR. Monitor Series: XD. Approved for public release; distribution is unlimited. Richalet, J., Rault, A., Testud, J. L., & Papon, J. (1978). Model predictive heuristic control. Automatica (journal of IFAC), 14(5), 413-428. Su, C. L., & Judd, K. L. (2012). Constrained optimization approaches to estimation of structural models. Econometrica, 80(5), 2213-2230. 39
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![自動運転車の意思決定 6 時間スケール マクロ ミクロ 制御計画 0~1 [sec] 軌道計画 本研究の対象](https://files.speakerdeck.com/presentations/545fb3e2735e4fdb99aeb53cc55d1a0c/slide_6.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}