their paths so that they can cover the entire free space of their environment using their coverage sensors.” Voronoi Partition-based Coverage Divide environment by Voronoi partition for each robot
their paths so that they can cover the entire free space of their environment using their coverage sensors.” Voronoi Partition-based Coverage Divide environment by Voronoi partition for each robot Robots divide partitions into cells, cover with Spanning Tree Coverage
their paths so that they can cover the entire free space of their environment using their coverage sensors.” Voronoi Partition-based Coverage Divide environment by Voronoi partition for each robot Robots divide partitions into cells, cover with Spanning Tree Coverage Obstacle avoidance / repartitioning
their paths so that they can cover the entire free space of their environment using their coverage sensors.” Voronoi Partition-based Coverage Divide environment by Voronoi partition for each robot Robots divide partitions into cells, cover with Spanning Tree Coverage Obstacle avoidance / repartitioning Fault tolerance
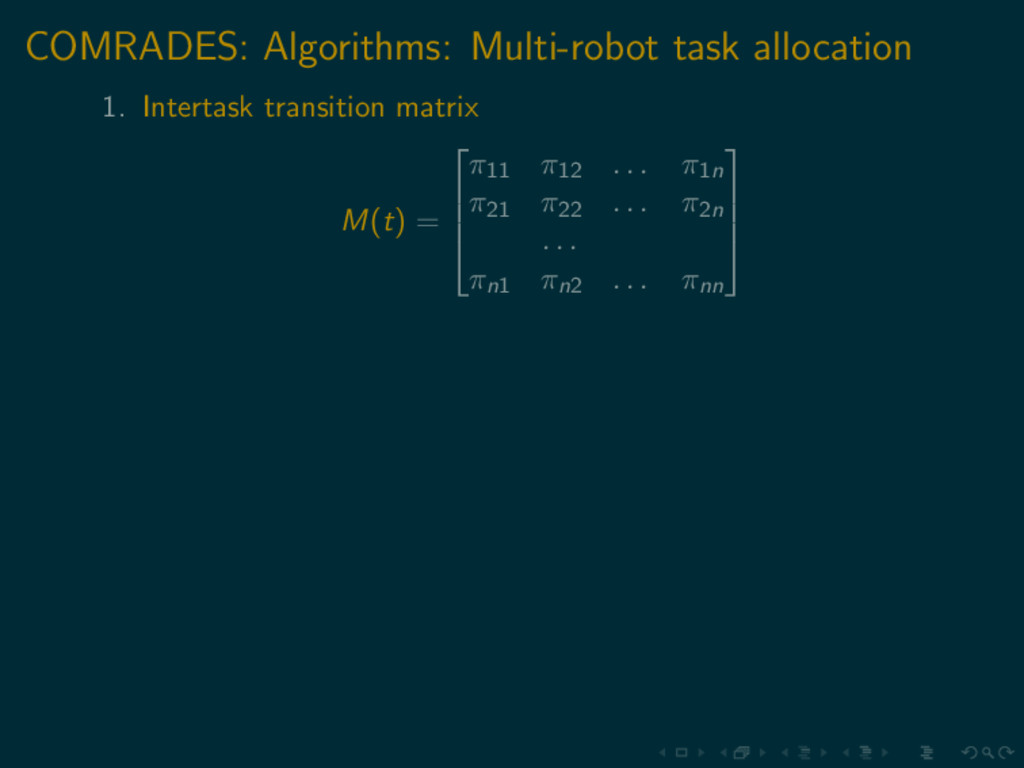
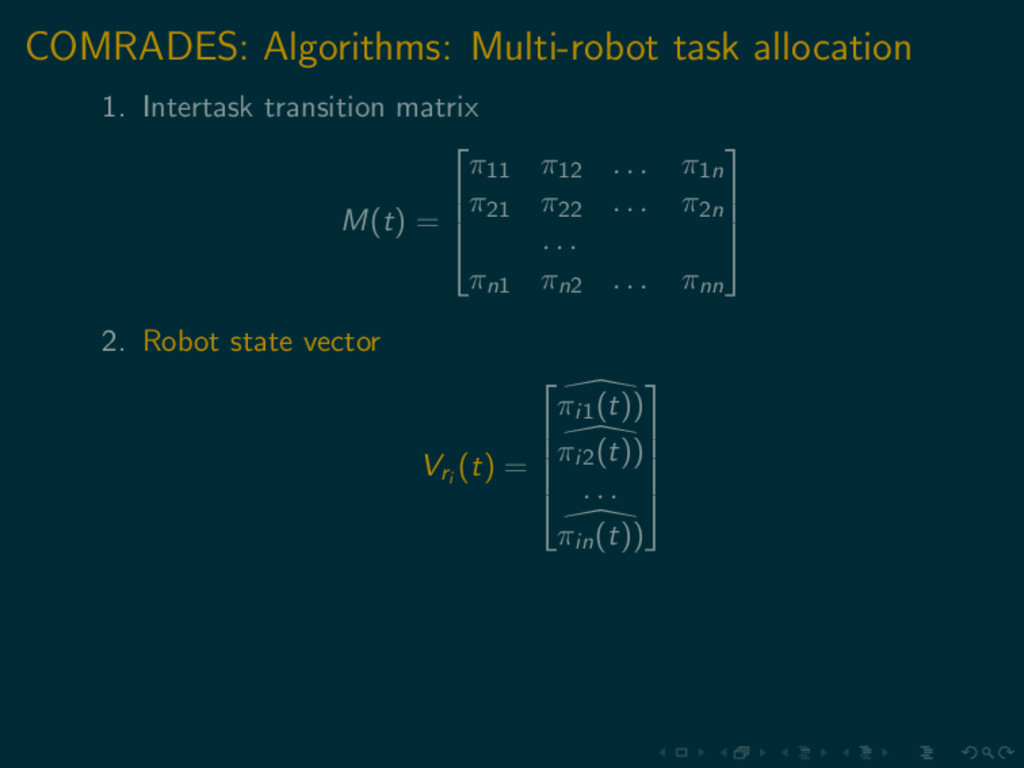
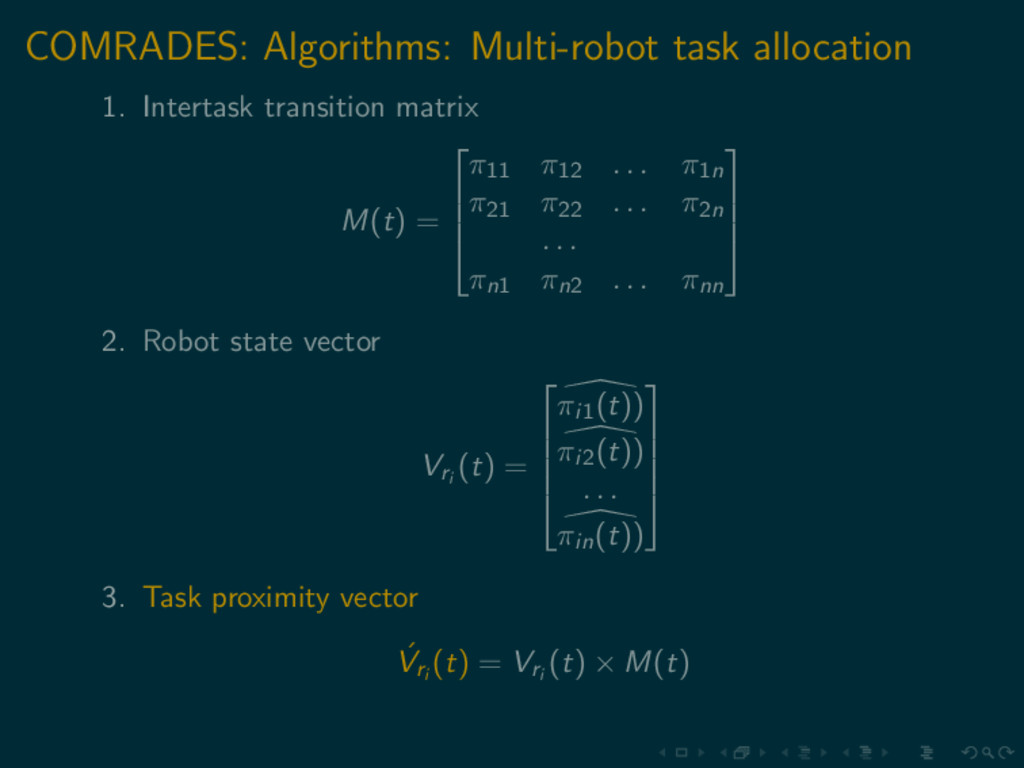
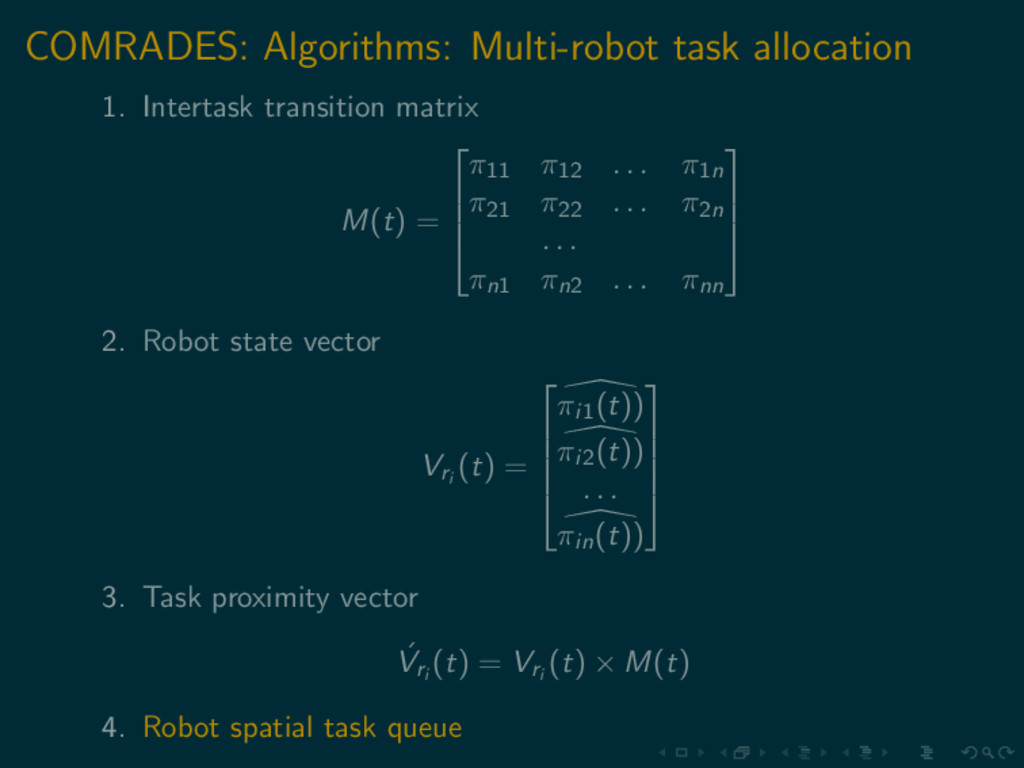
suitable assignment of tasks to robots so that the tasks performed by the robots can be completed in an efficient manner in terms of time and energy expended by the robots.”
suitable assignment of tasks to robots so that the tasks performed by the robots can be completed in an efficient manner in terms of time and energy expended by the robots.” Each type of sensor must visit a potential landmine
suitable assignment of tasks to robots so that the tasks performed by the robots can be completed in an efficient manner in terms of time and energy expended by the robots.” Each type of sensor must visit a potential landmine Equivalent to multiple traveling salesman problem (NP-Hard)
suitable assignment of tasks to robots so that the tasks performed by the robots can be completed in an efficient manner in terms of time and energy expended by the robots.” Each type of sensor must visit a potential landmine Equivalent to multiple traveling salesman problem (NP-Hard) Heuristic solution using a spatial task queue
the task at the top of the queue Robot with highest bid (lowest distance) is assigned task Robots announce when they have completed a task, transition matrices rebuilt
the characteristics of a potential landmine from different types of sensors and make a decision whether the object is indeed a landmine” Performed by prediction market technique
the characteristics of a potential landmine from different types of sensors and make a decision whether the object is indeed a landmine” Performed by prediction market technique Sensor agent calculates probability that an object is a landmine
the characteristics of a potential landmine from different types of sensors and make a decision whether the object is indeed a landmine” Performed by prediction market technique Sensor agent calculates probability that an object is a landmine Sensor agent calculates report based on belief and expected reward
the characteristics of a potential landmine from different types of sensors and make a decision whether the object is indeed a landmine” Performed by prediction market technique Sensor agent calculates probability that an object is a landmine Sensor agent calculates report based on belief and expected reward Sensor agent submits report to market maker agent
the characteristics of a potential landmine from different types of sensors and make a decision whether the object is indeed a landmine” Performed by prediction market technique Sensor agent calculates probability that an object is a landmine Sensor agent calculates report based on belief and expected reward Sensor agent submits report to market maker agent Market maker agent calculates aggregate belief from reports
the characteristics of a potential landmine from different types of sensors and make a decision whether the object is indeed a landmine” Performed by prediction market technique Sensor agent calculates probability that an object is a landmine Sensor agent calculates report based on belief and expected reward Sensor agent submits report to market maker agent Market maker agent calculates aggregate belief from reports Decision maker agent decides what other sensors should be deployed
Compression Done: Reduced algorithm overhead To Do: Better than randomly selecting a new area after failing to bound a polyregion Dynamically adjust the the block size according to robot’s coverage performance
Compression Done: Reduced algorithm overhead To Do: Better than randomly selecting a new area after failing to bound a polyregion Dynamically adjust the the block size according to robot’s coverage performance Combine perceived long-range sensor data with historical coverage information
Compression Done: Reduced algorithm overhead To Do: Better than randomly selecting a new area after failing to bound a polyregion Dynamically adjust the the block size according to robot’s coverage performance Combine perceived long-range sensor data with historical coverage information Lossless compression techniques for coverage data to increase the accuracy of fused covered regions
Ground Robotic System Aerial robots help ground robots more effectively navigate the environment Done: Widens the area range for ground robots To Do: Obstacles
(and therefore avoid obstacles on the ground), should aerial robots act as the information aggregator for a team of ground robots where it concerns map sharing?
communication constraints 1. A perimeter P := {p(x) ∈ R2 : x ∈ [0, L]} 2. A set of N mobile robots Mi ∈ {M1...Mn} 3. Each robot can move along P in two directions with a variable speed vi
communication constraints 1. A perimeter P := {p(x) ∈ R2 : x ∈ [0, L]} 2. A set of N mobile robots Mi ∈ {M1...Mn} 3. Each robot can move along P in two directions with a variable speed vi 4. Communication radius of robots is not wide enough to cover the entire perimeter
uniformity, or average frequency Cyclic: robots spaced evenly across perimeter Non-frequentist strategies Stochastic or non-deterministic Behavioral control with finite state automata
uniformity, or average frequency Cyclic: robots spaced evenly across perimeter Non-frequentist strategies Stochastic or non-deterministic Behavioral control with finite state automata Many previous strategies are centralized
and better path partitioning Algorithm: Robust, at most 2N communications, and experimentally verified Future Work: Heterogenous terrain, priority, or varied sensor types?
Maza, and An´ ıbal Ollero. Cooperative perimeter surveillance with a team of mobile robots under communication constraints. In Intelligent Robots and Systems (IROS), 2013 IEEE/RSJ International Conference on, pages 5067–5072. IEEE, 2013. [2] Thumeera R Wanasinghe, George KI Mann, and Raymond G Gosine. Relative localization approach for combined aerial and ground robotic system. Journal of Intelligent & Robotic Systems, 77(1):113–133, 2015. [3] Zachary Wilson, Taylor Whipple, and Prithviraj Dasgupta. Multi-robot Coverage with Dynamic Coverage Information Compression. University of Nebraska at Omaha, 2014.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![COMRADES: Algorithms Definition (Coverage Path Planning) “[A]llowing robots to plan](https://files.speakerdeck.com/presentations/40dada38f10942198aec6679ec9935bf/slide_18.jpg){kind=link}
![COMRADES: Algorithms Definition (Coverage Path Planning) “[A]llowing robots to plan](https://files.speakerdeck.com/presentations/40dada38f10942198aec6679ec9935bf/slide_19.jpg){kind=link}
![COMRADES: Algorithms Definition (Coverage Path Planning) “[A]llowing robots to plan](https://files.speakerdeck.com/presentations/40dada38f10942198aec6679ec9935bf/slide_20.jpg){kind=link}
![COMRADES: Algorithms Definition (Coverage Path Planning) “[A]llowing robots to plan](https://files.speakerdeck.com/presentations/40dada38f10942198aec6679ec9935bf/slide_21.jpg){kind=link}
![COMRADES: Algorithms Definition (Coverage Path Planning) “[A]llowing robots to plan](https://files.speakerdeck.com/presentations/40dada38f10942198aec6679ec9935bf/slide_22.jpg){kind=link}
![COMRADES: Algorithms Definition (Multi-robot task allocation) “[H]ow to find a](https://files.speakerdeck.com/presentations/40dada38f10942198aec6679ec9935bf/slide_23.jpg){kind=link}
![COMRADES: Algorithms Definition (Multi-robot task allocation) “[H]ow to find a](https://files.speakerdeck.com/presentations/40dada38f10942198aec6679ec9935bf/slide_24.jpg){kind=link}
![COMRADES: Algorithms Definition (Multi-robot task allocation) “[H]ow to find a](https://files.speakerdeck.com/presentations/40dada38f10942198aec6679ec9935bf/slide_25.jpg){kind=link}
![COMRADES: Algorithms Definition (Multi-robot task allocation) “[H]ow to find a](https://files.speakerdeck.com/presentations/40dada38f10942198aec6679ec9935bf/slide_26.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![COMRADES: Algorithms Definition (Information aggregation) “[T]o combine the information about](https://files.speakerdeck.com/presentations/40dada38f10942198aec6679ec9935bf/slide_32.jpg){kind=link}
![COMRADES: Algorithms Definition (Information aggregation) “[T]o combine the information about](https://files.speakerdeck.com/presentations/40dada38f10942198aec6679ec9935bf/slide_33.jpg){kind=link}
![COMRADES: Algorithms Definition (Information aggregation) “[T]o combine the information about](https://files.speakerdeck.com/presentations/40dada38f10942198aec6679ec9935bf/slide_34.jpg){kind=link}
![COMRADES: Algorithms Definition (Information aggregation) “[T]o combine the information about](https://files.speakerdeck.com/presentations/40dada38f10942198aec6679ec9935bf/slide_35.jpg){kind=link}
![COMRADES: Algorithms Definition (Information aggregation) “[T]o combine the information about](https://files.speakerdeck.com/presentations/40dada38f10942198aec6679ec9935bf/slide_36.jpg){kind=link}
![COMRADES: Algorithms Definition (Information aggregation) “[T]o combine the information about](https://files.speakerdeck.com/presentations/40dada38f10942198aec6679ec9935bf/slide_37.jpg){kind=link}
![COMRADES: Algorithms Definition (Information aggregation) “[T]o combine the information about](https://files.speakerdeck.com/presentations/40dada38f10942198aec6679ec9935bf/slide_38.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Bibliography [1] Jose Joaquin Acevedo, Bego˜ na C Arrue, Ivan](https://files.speakerdeck.com/presentations/40dada38f10942198aec6679ec9935bf/slide_93.jpg){kind=link}