講義に入る前に 確認事項
前回までの復習
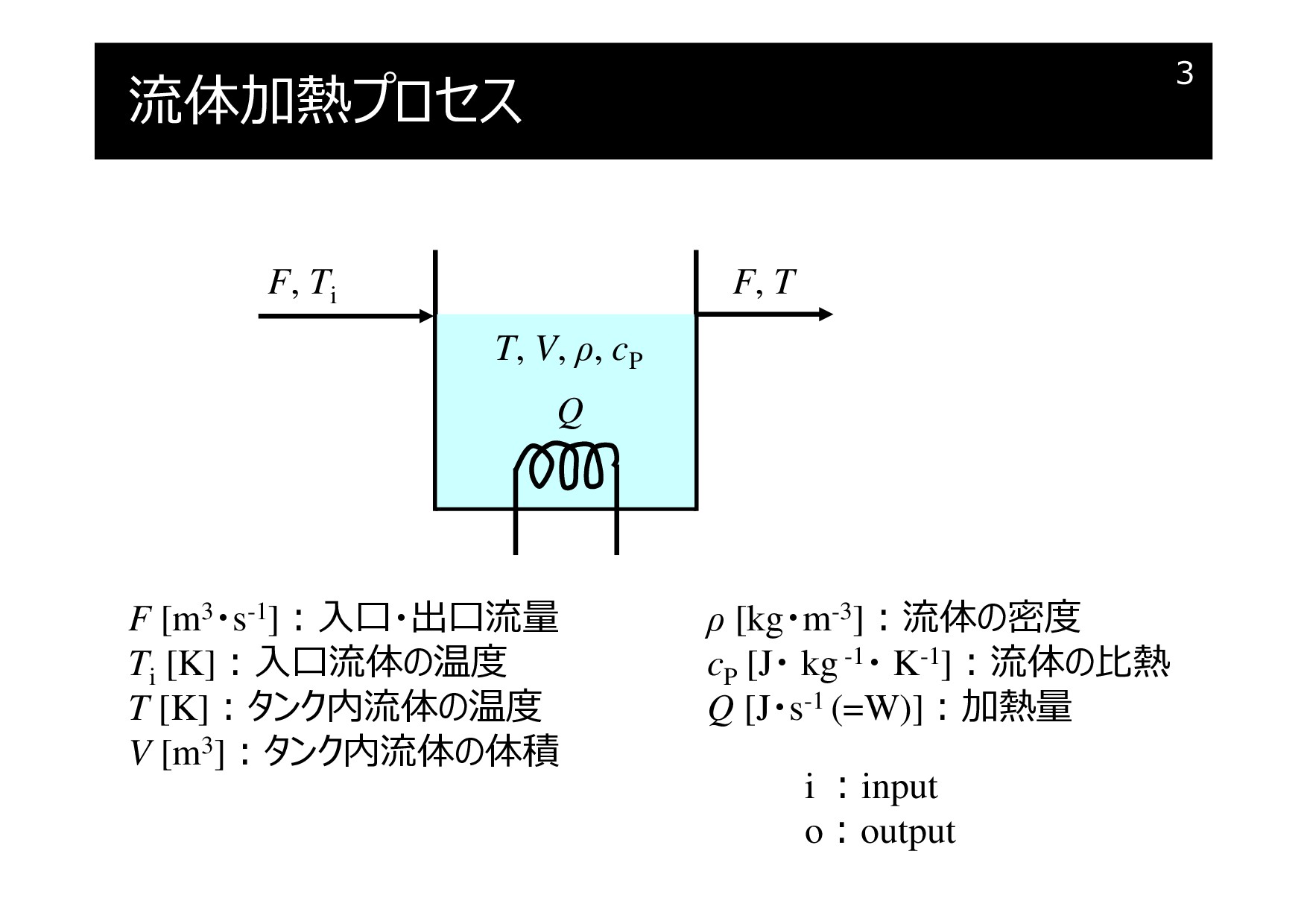
流体加熱プロセス
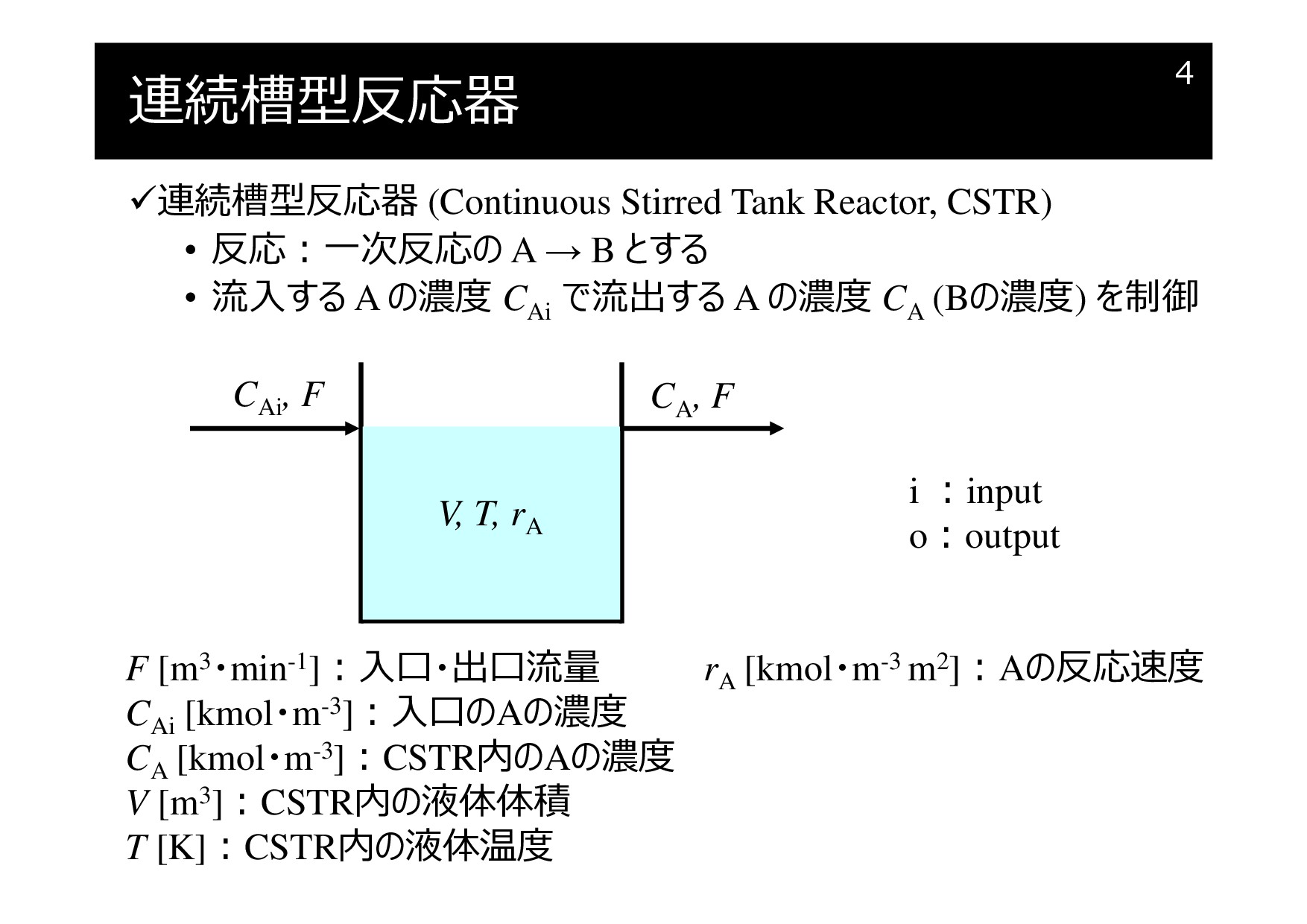
連続槽型反応器
タンクの液面高さ(液レベル)制御
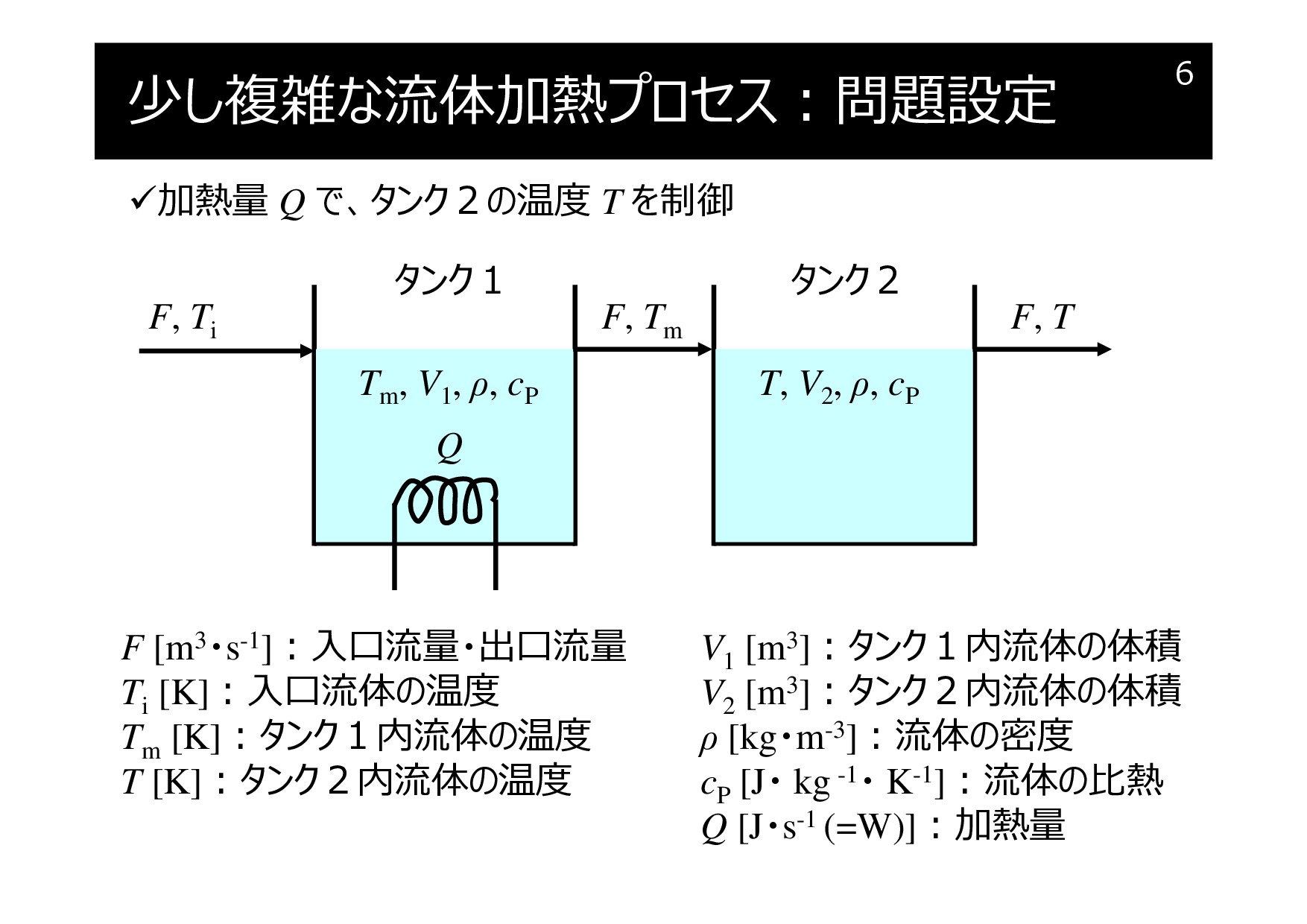
少し複雑な流体加熱プロセス:問題設定
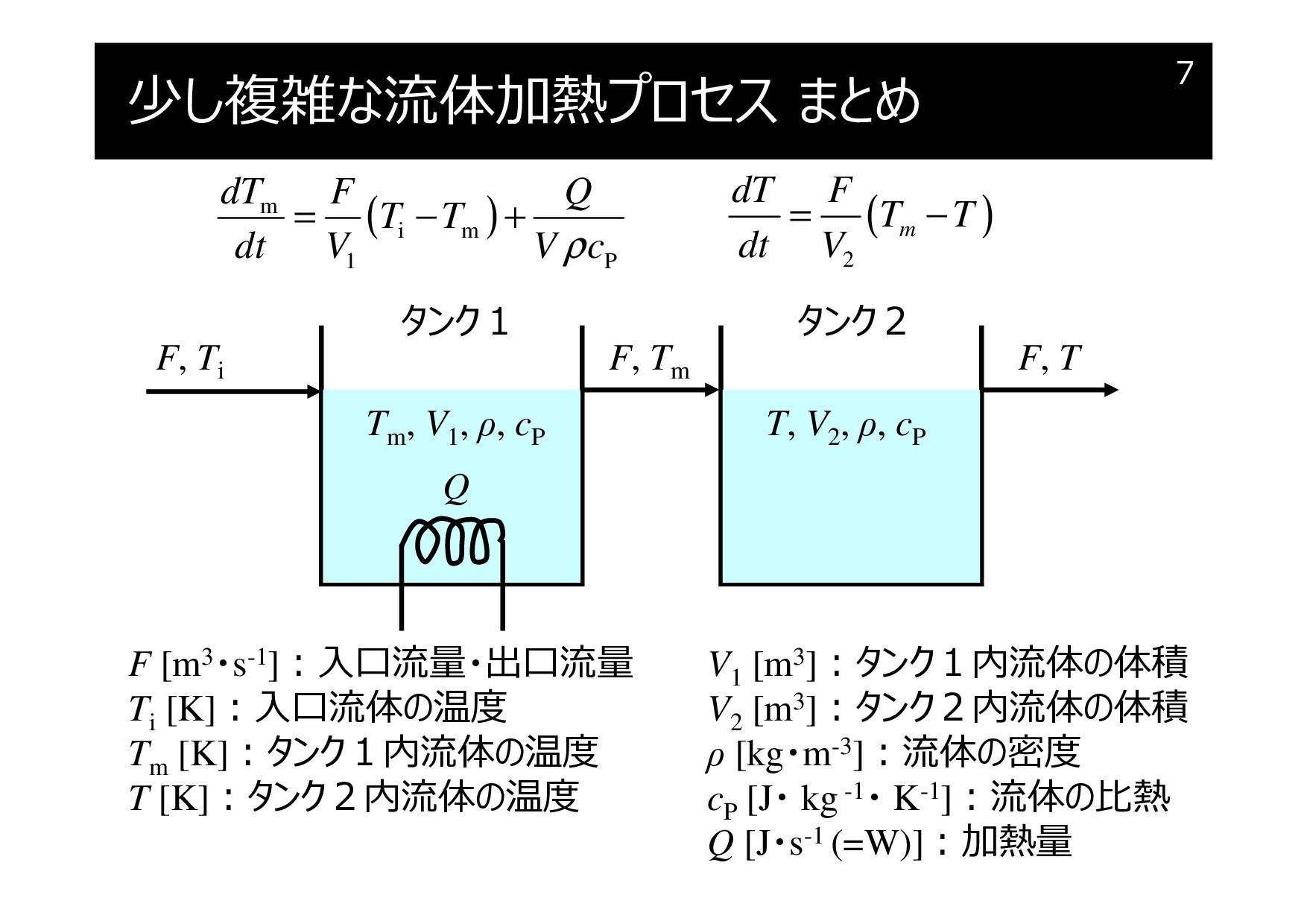
少し複雑な流体加熱プロセス まとめ
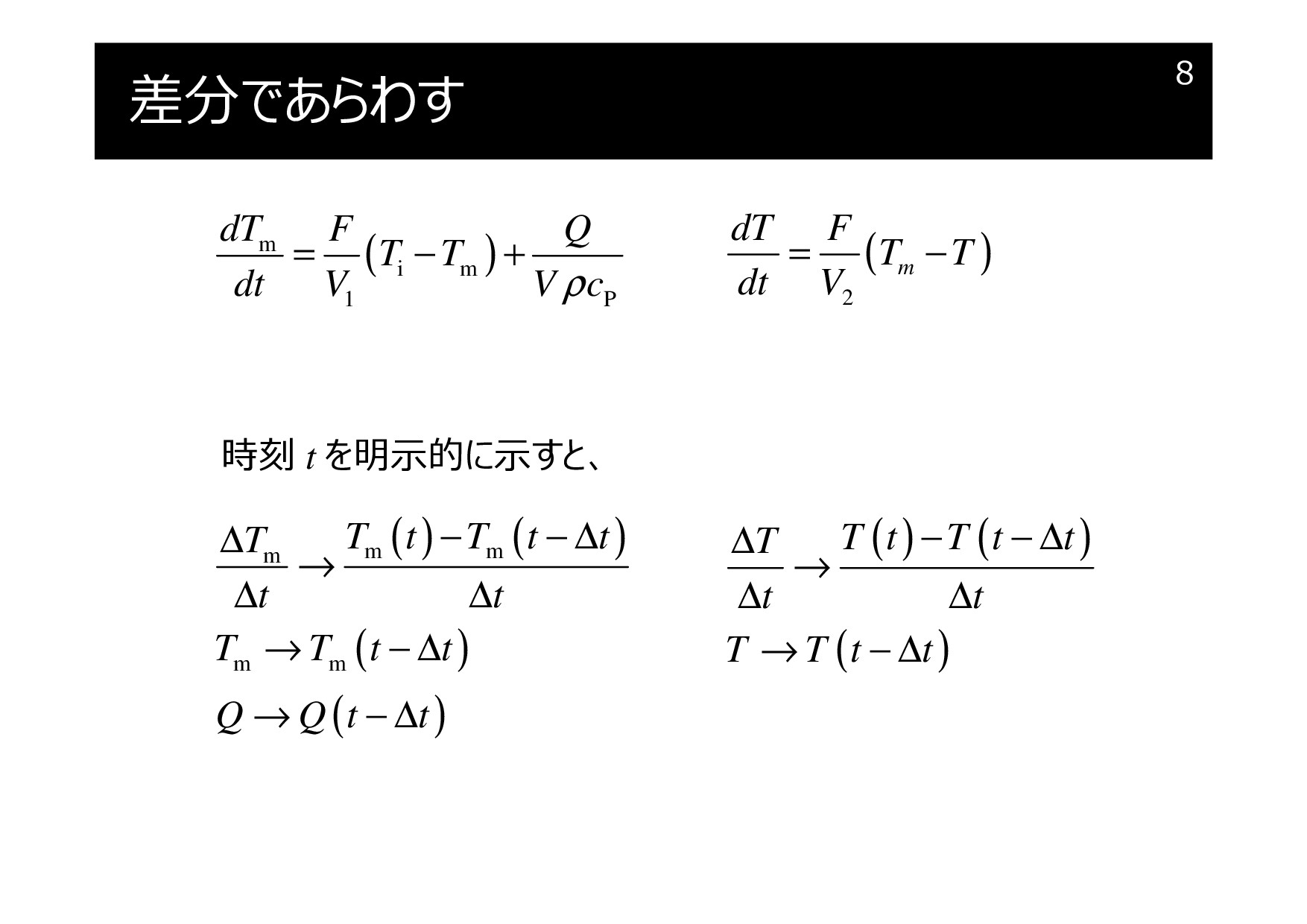
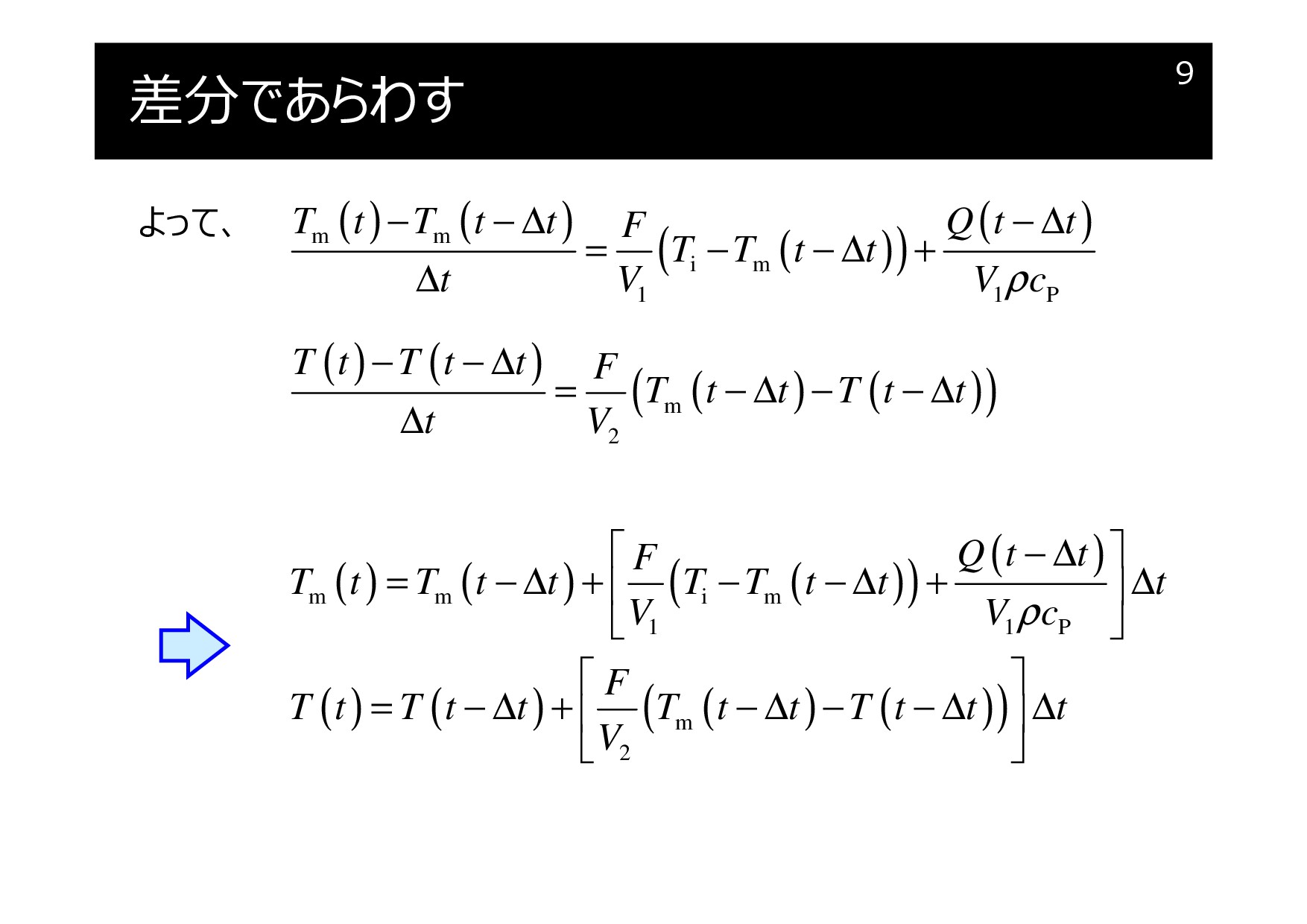
差分であらわす
流体加熱プロセスのシミュレーション
設定値変更してみよう
外乱を加えてみよう
PID制御の問題点は?
PID制御の問題点
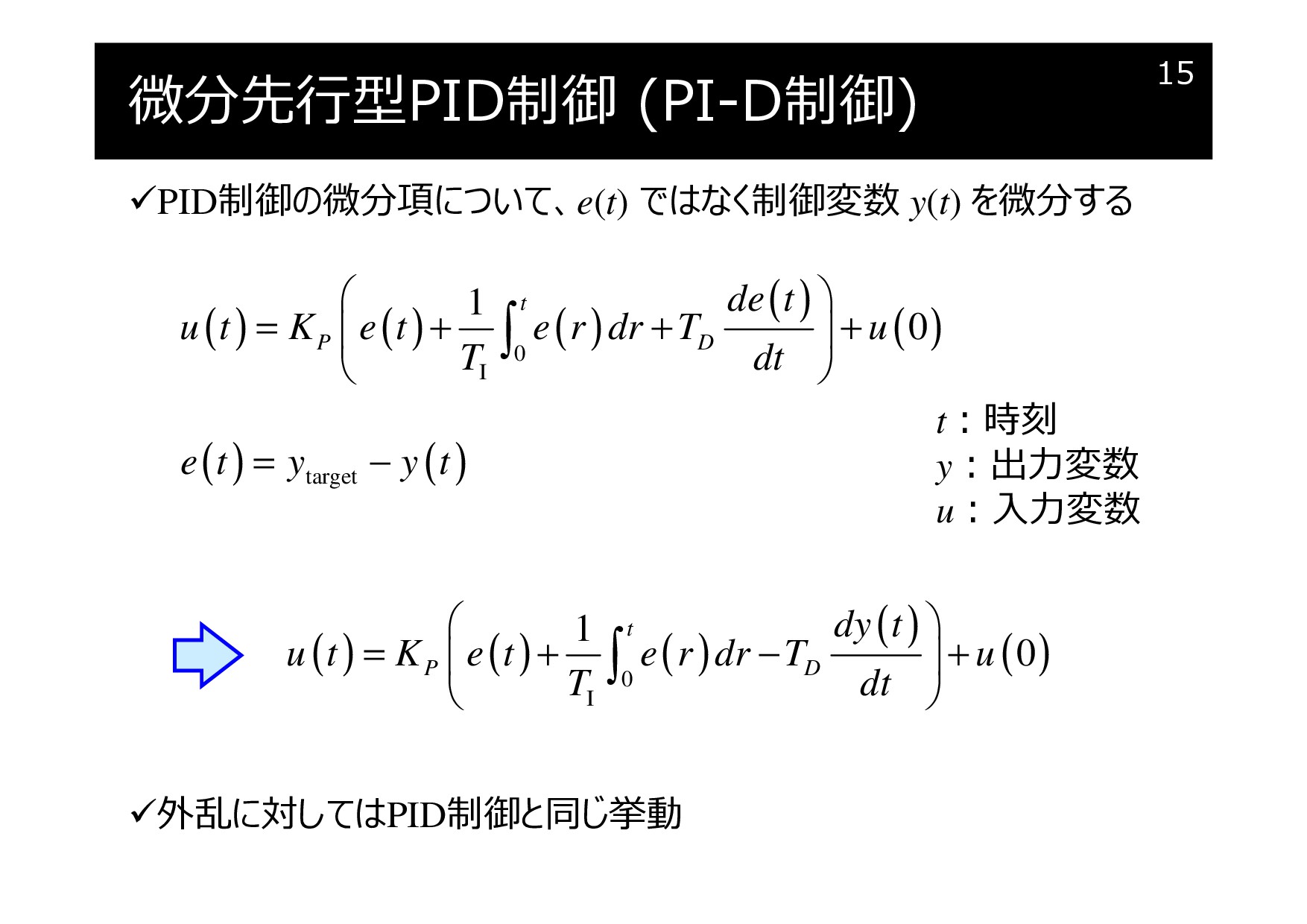
微分先行型PID制御 (PI-D制御)
PID制御の問題点
比例微分先行型PID制御 (I-PD制御)
比較してみよう!
PID制御 これまでのまとめ
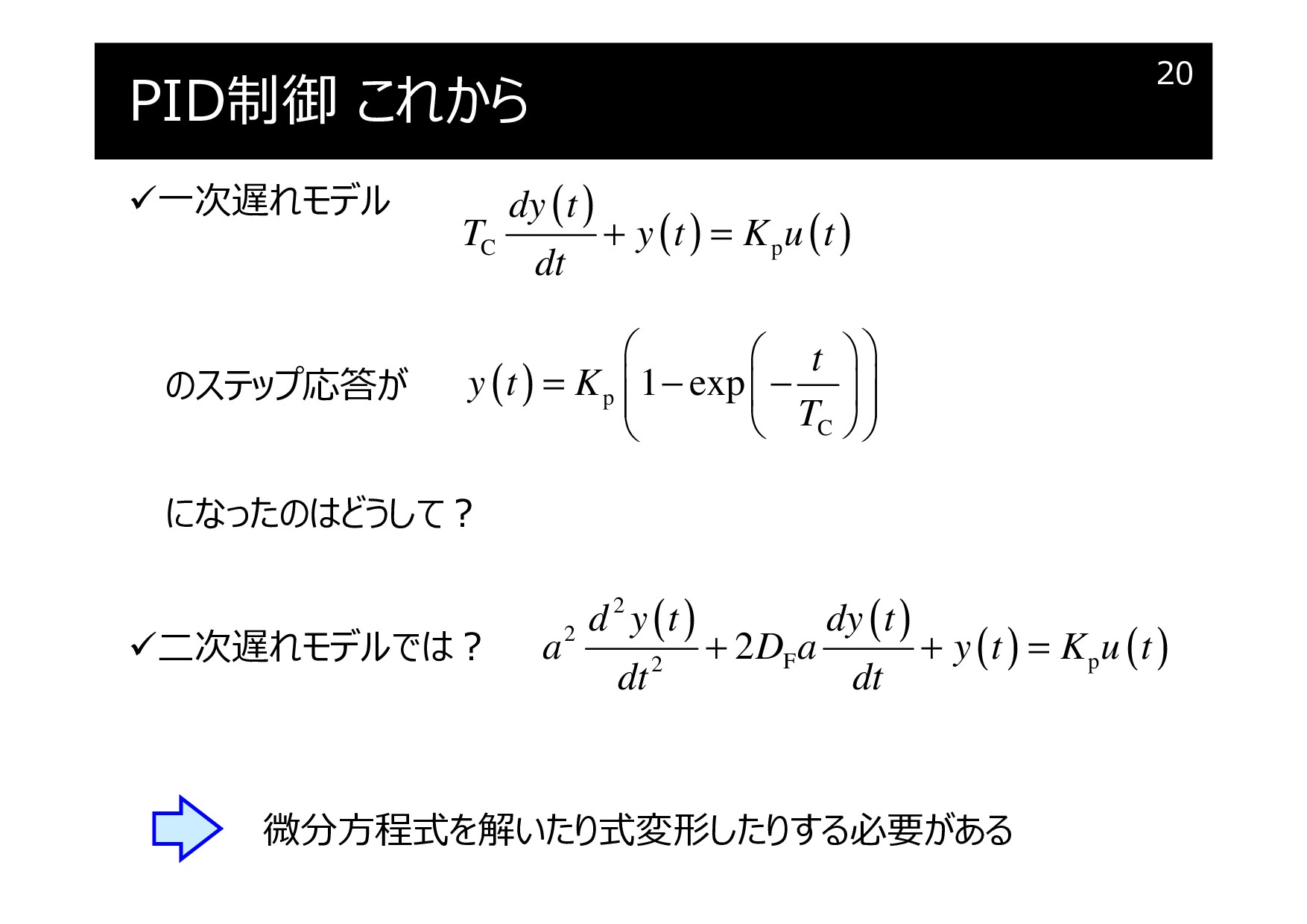
PID制御 これから
微分方程式を解くことのメリット
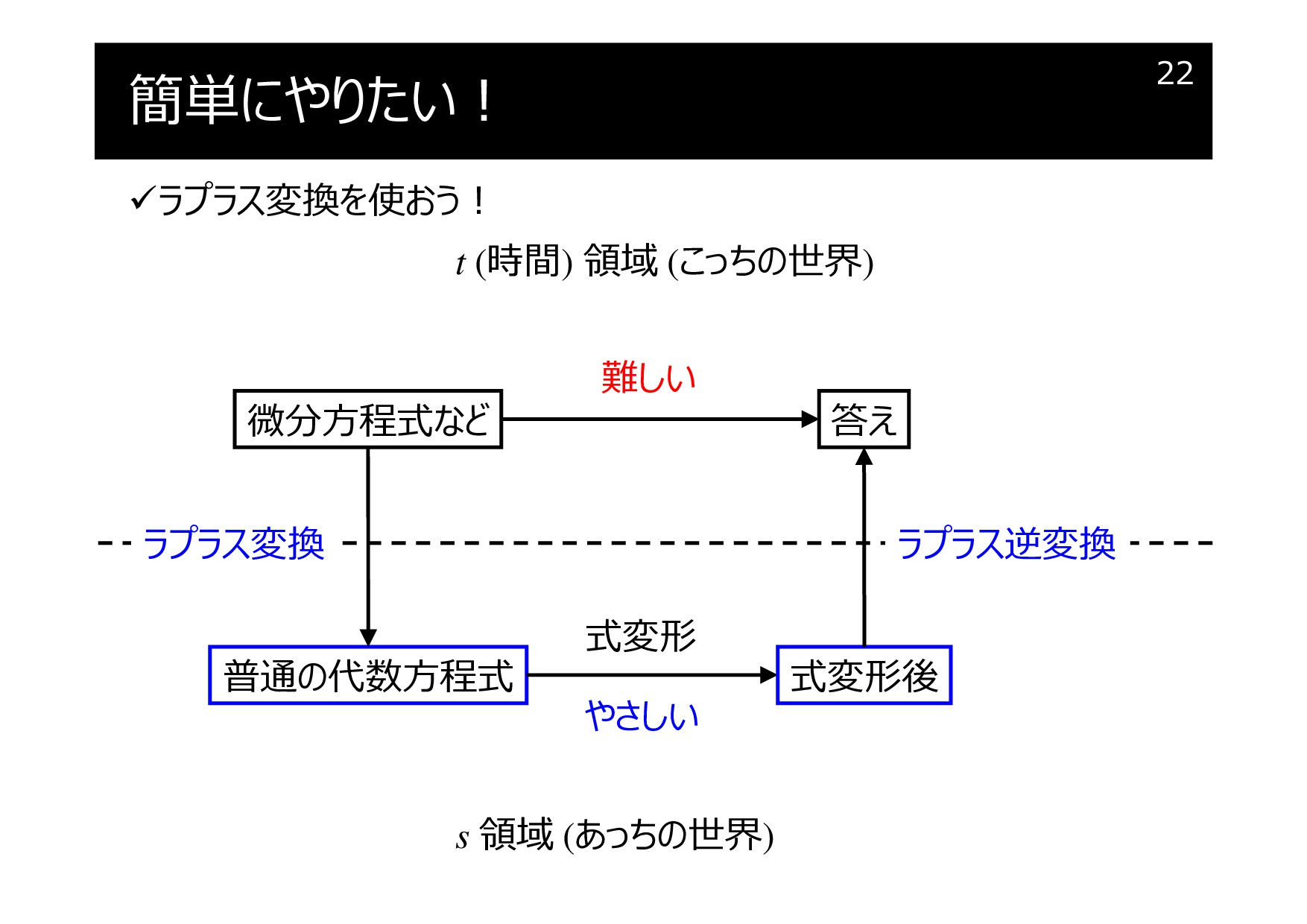
簡単にやりたい!
ラプラス(逆)変換は、ただの道具!
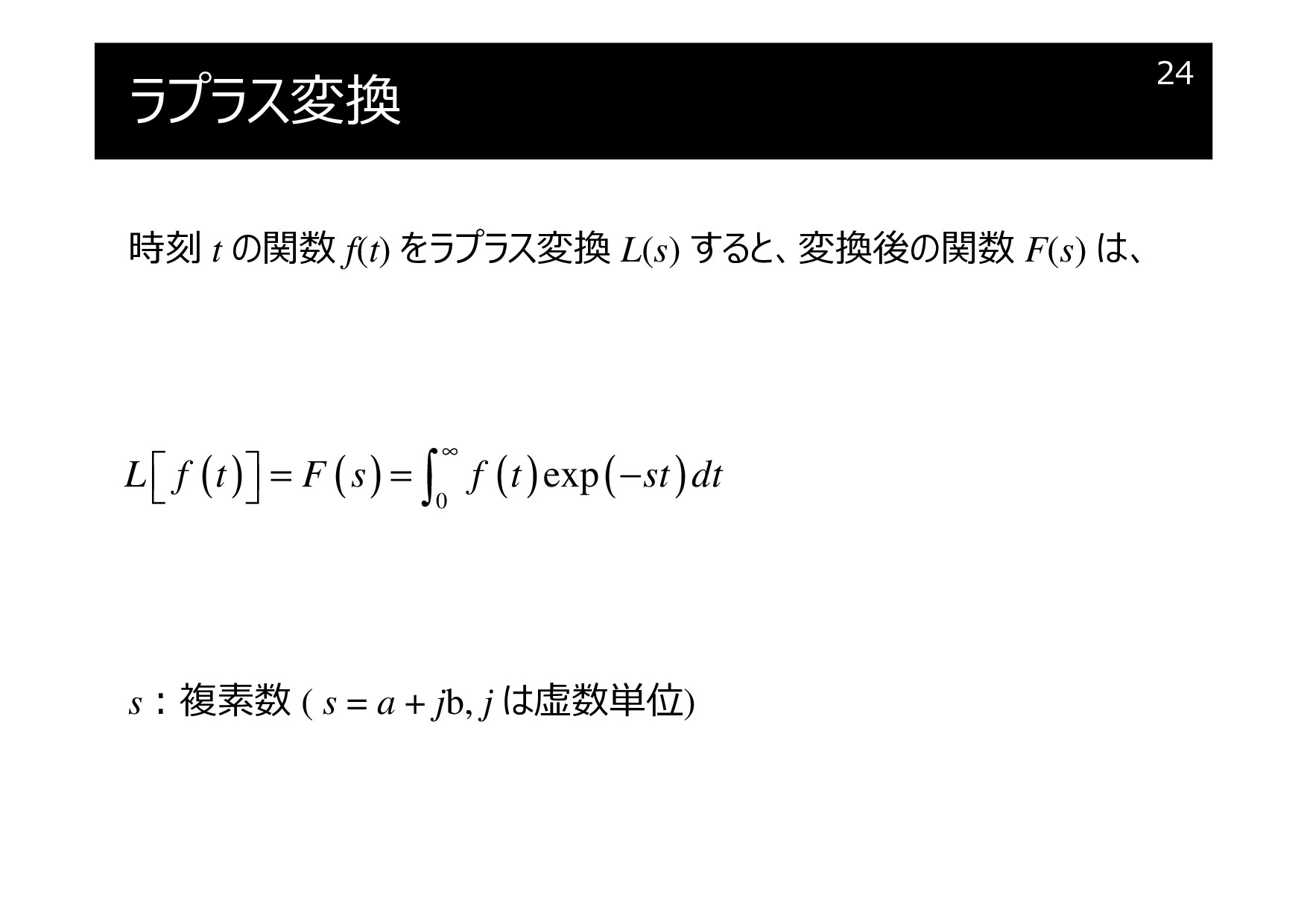
ラプラス変換
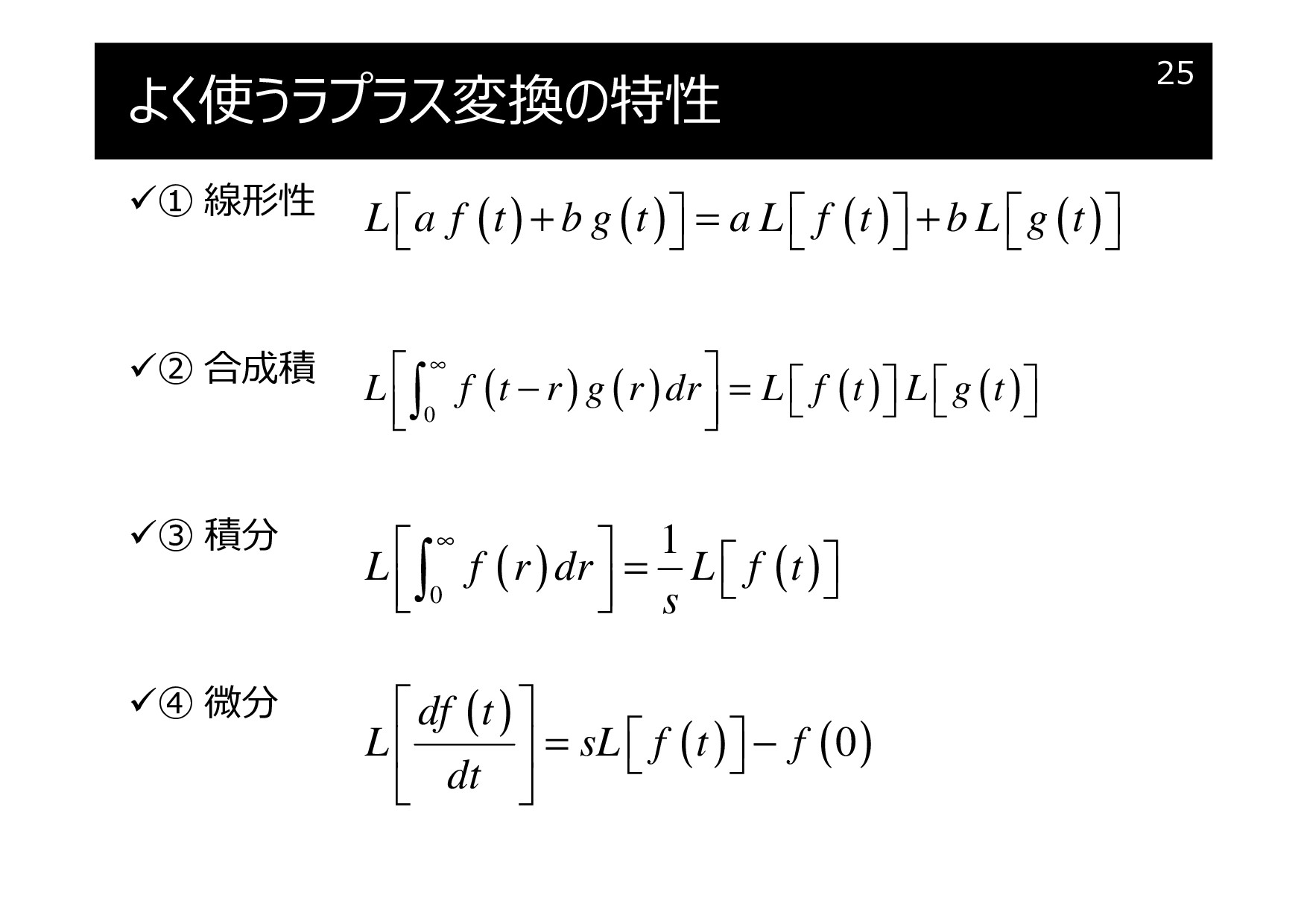
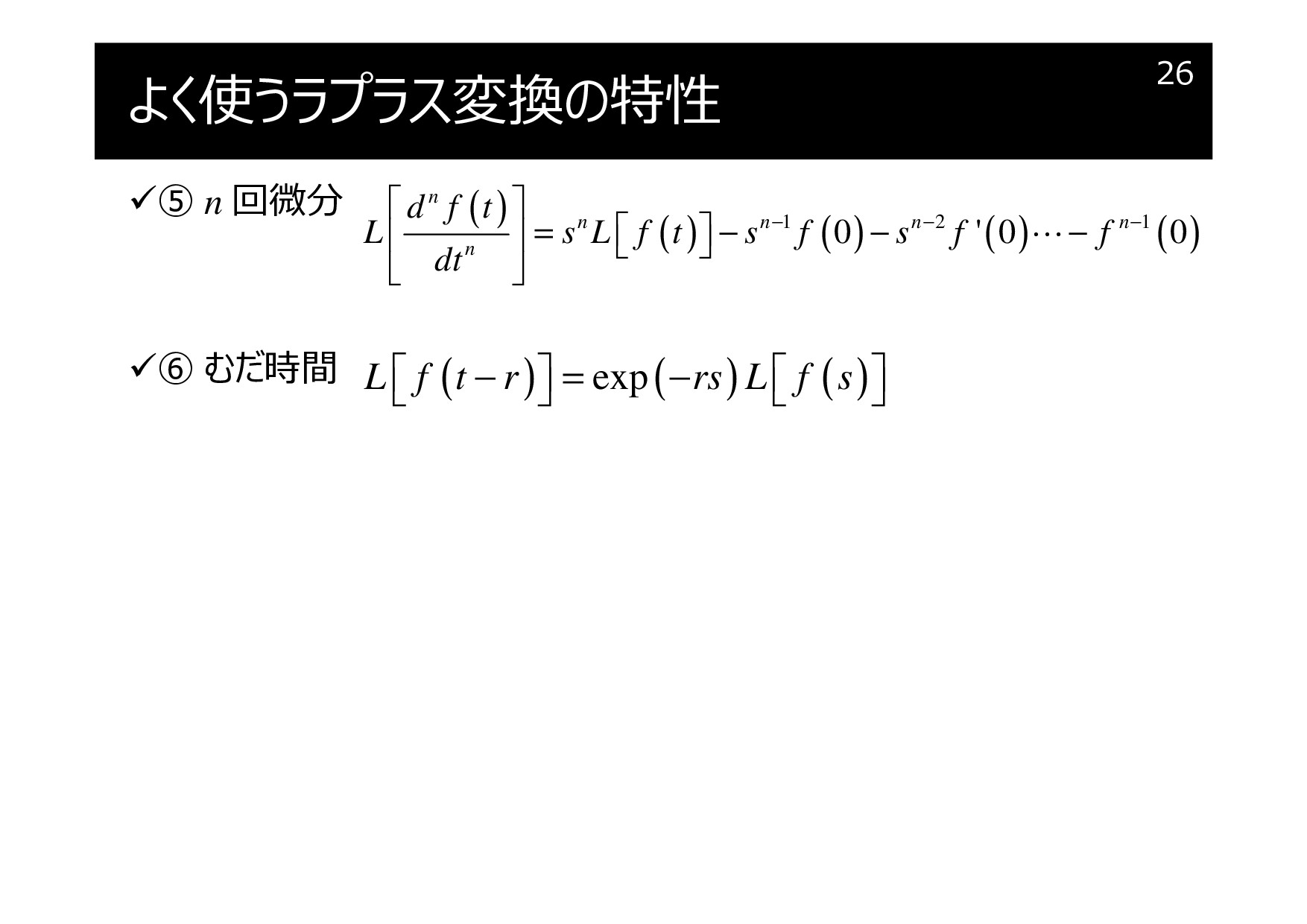
よく使うラプラス変換の特性
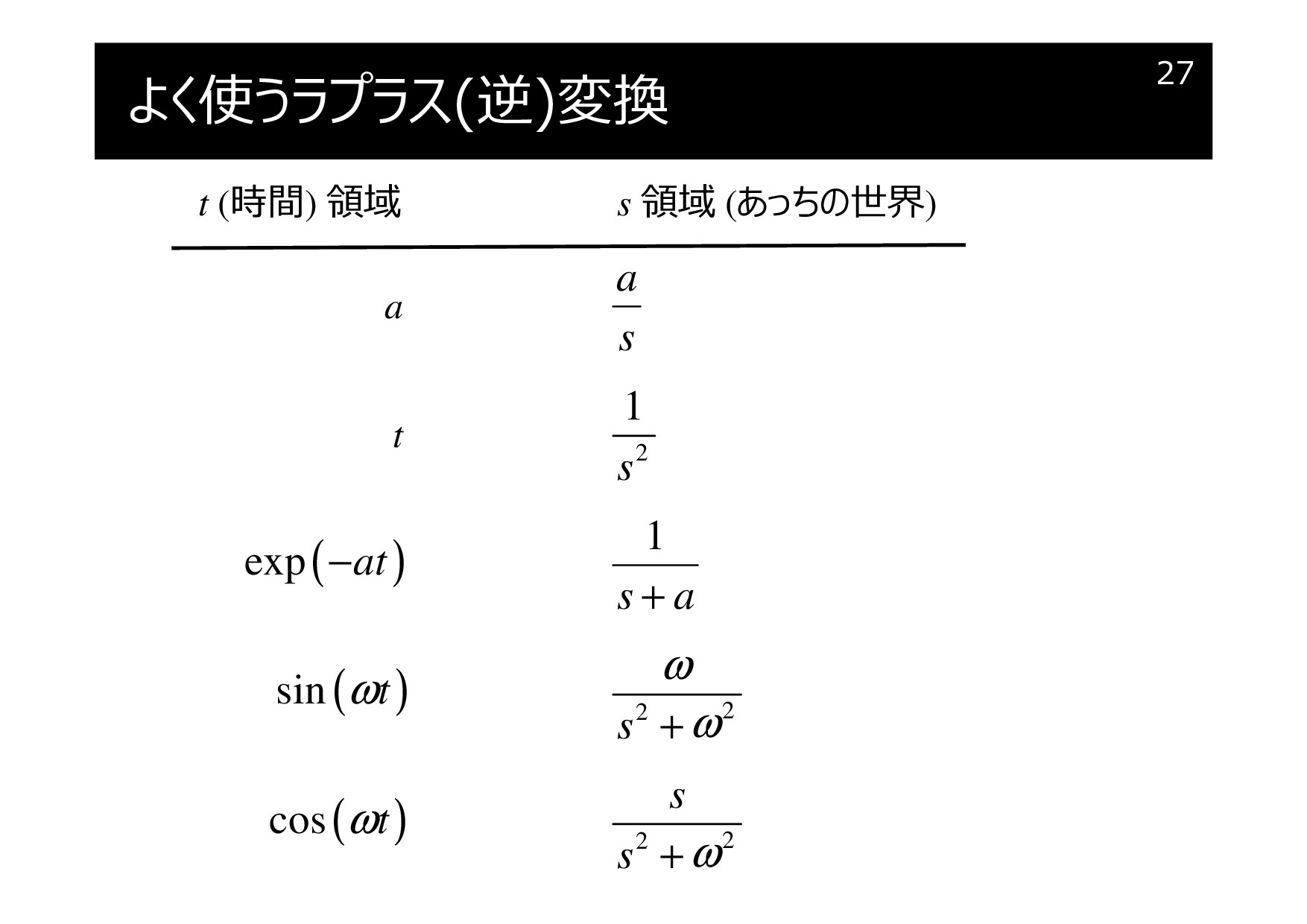
よく使うラプラス(逆)変換
1次遅れモデルを思い出す
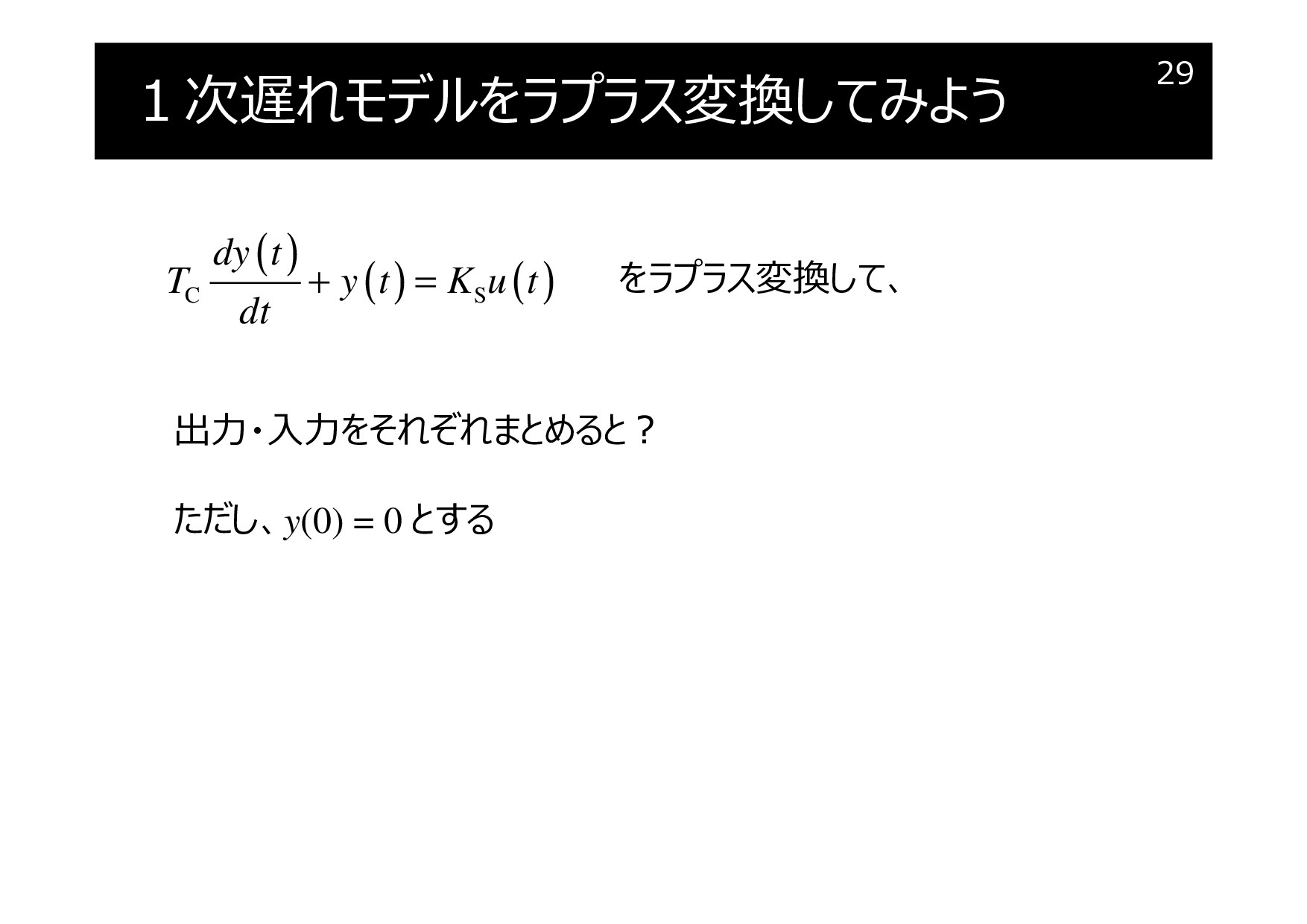
1次遅れモデルをラプラス変換してみよう
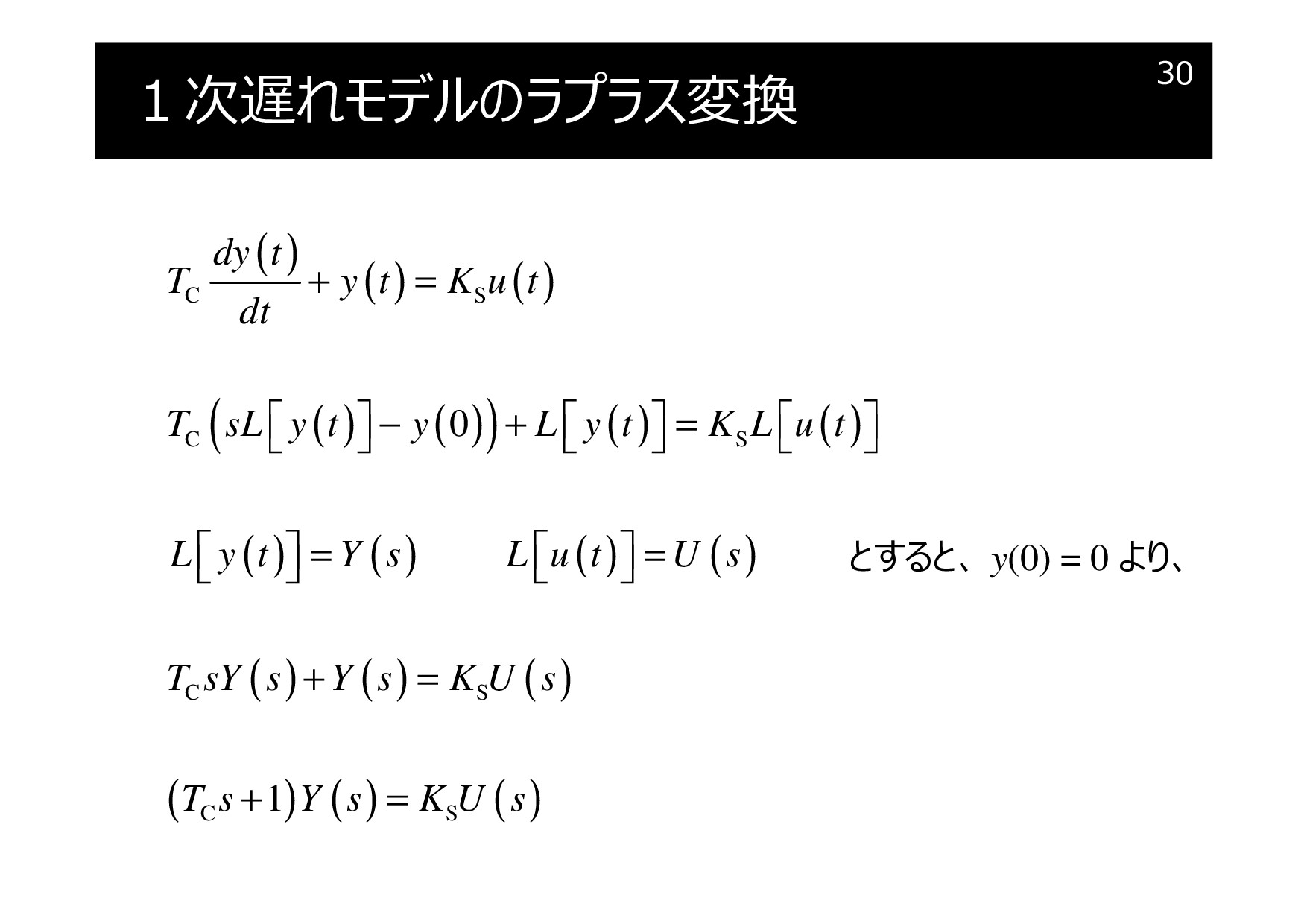
1次遅れモデルのラプラス変換
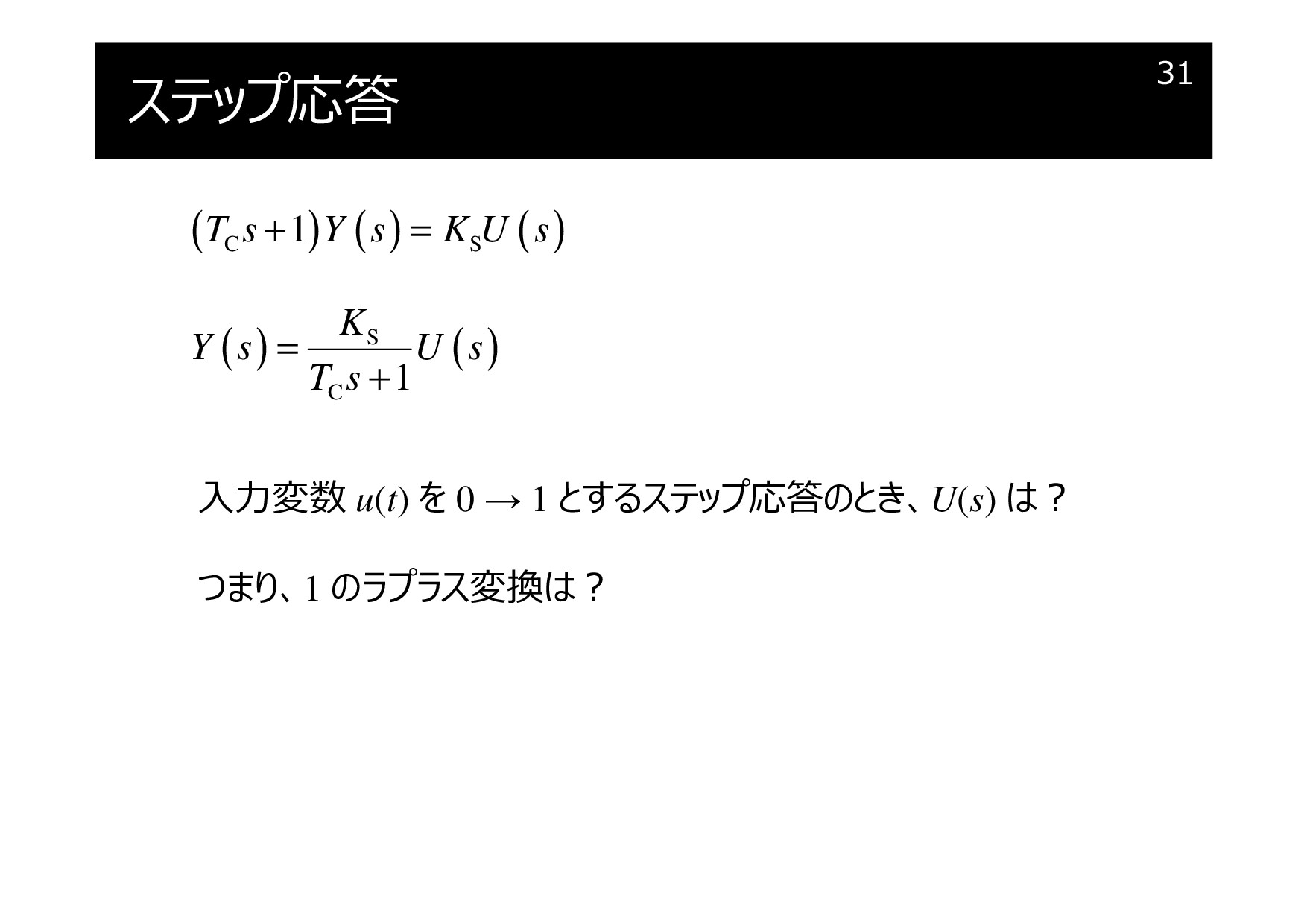
ステップ応答
ついに、Y(s) = ・・・ へ
ラプラス逆変換
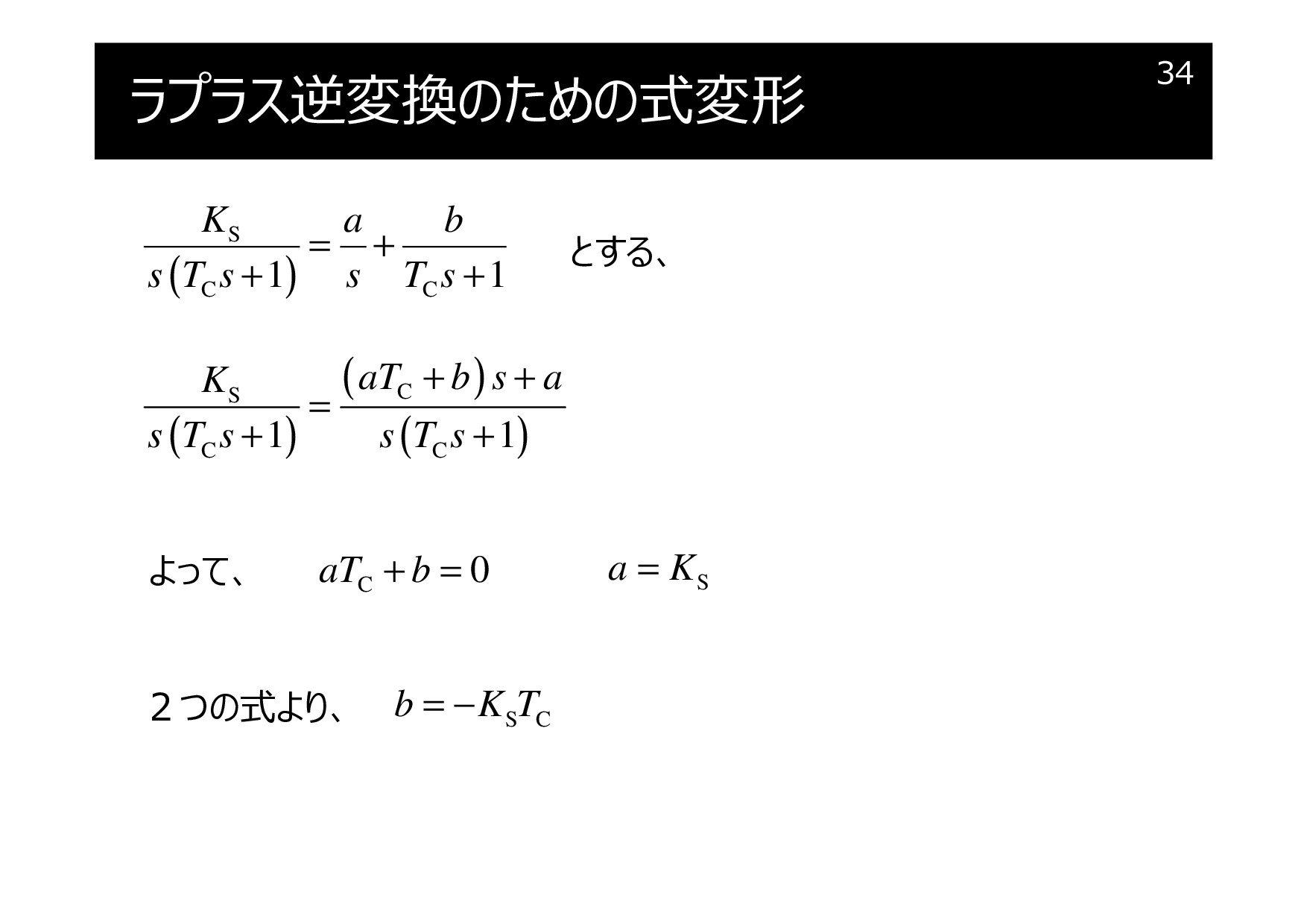
ラプラス逆変換のための式変形
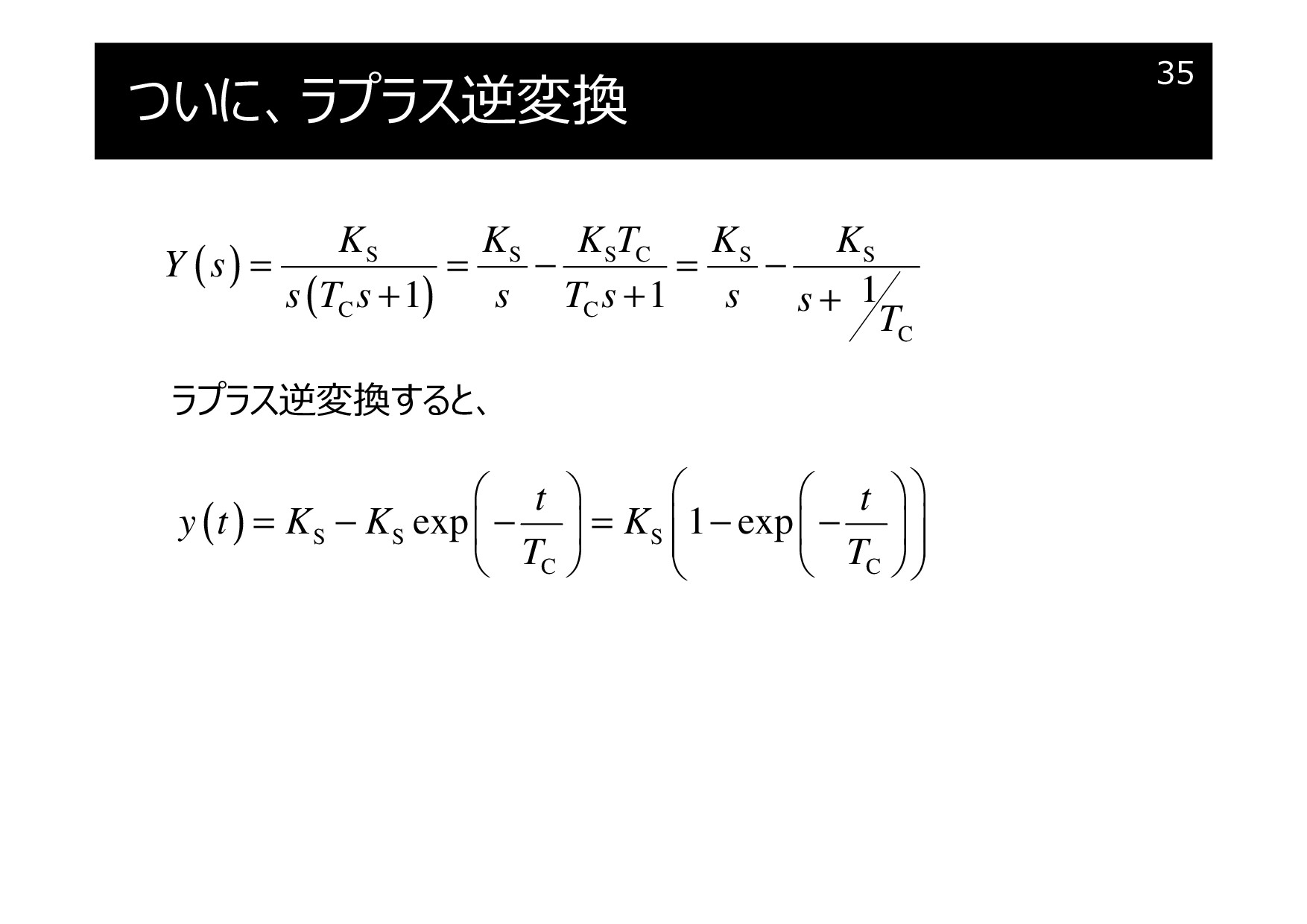
ついに、ラプラス逆変換
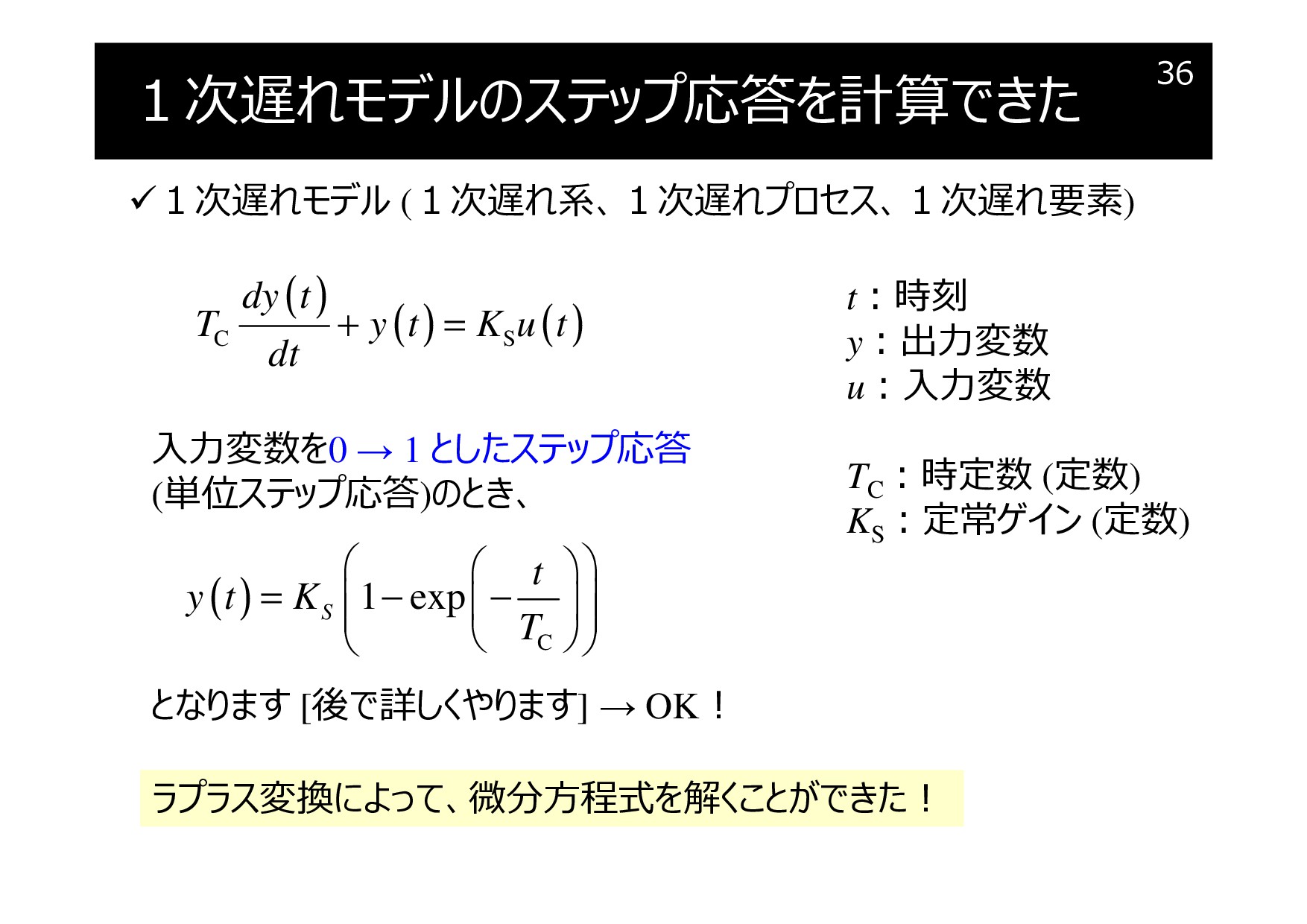
1次遅れモデルのステップ応答を計算できた
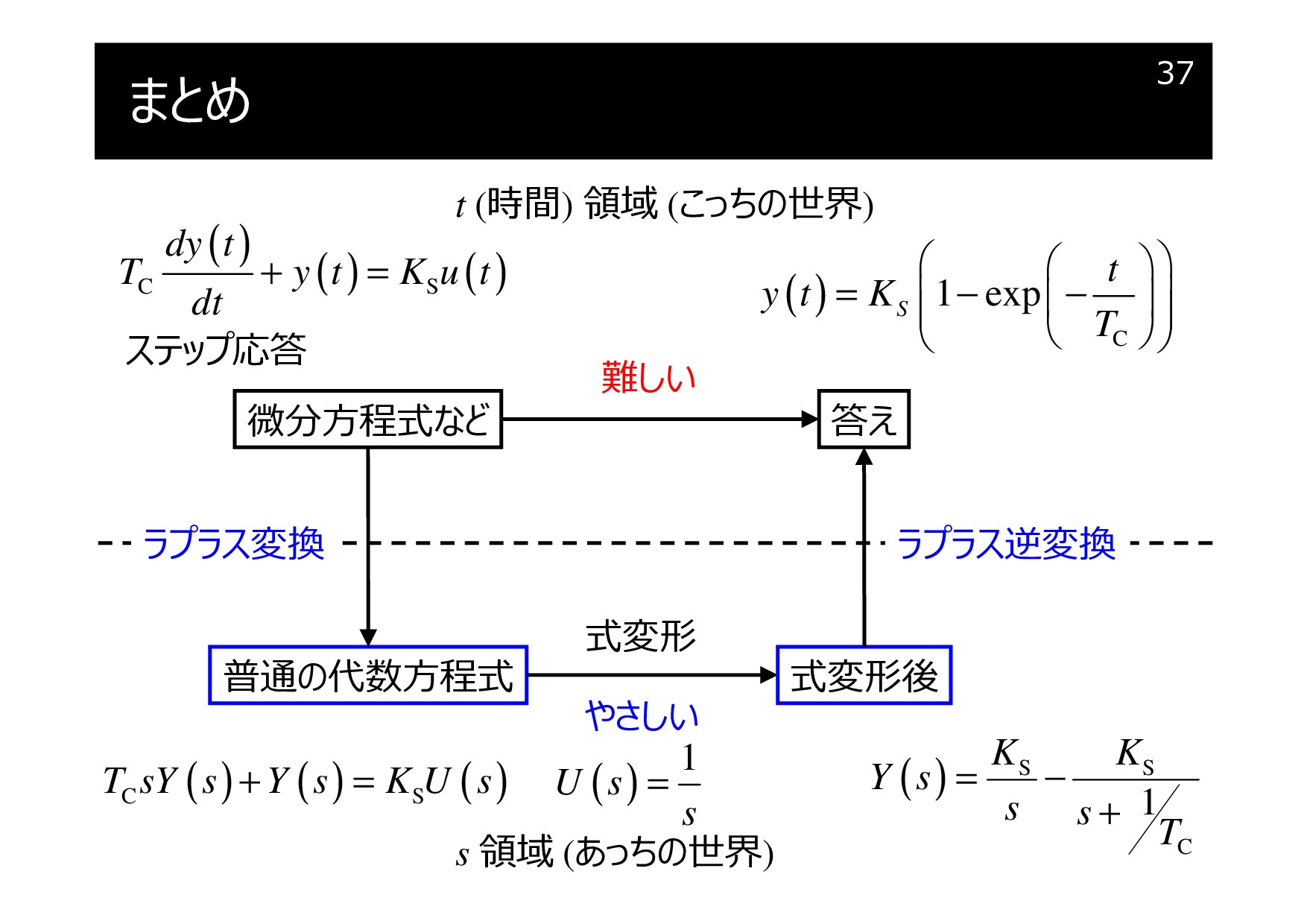
まとめ
[練習] 流体加熱プロセス
[練習] 流体加熱プロセス
[練習] 流体加熱プロセス
[練習] ラプラス変換
[練習] ステップ応答
[練習] ラプラス逆変換のための式変形
[練習] ラプラス逆変換
[練習] 流体加熱プロセス
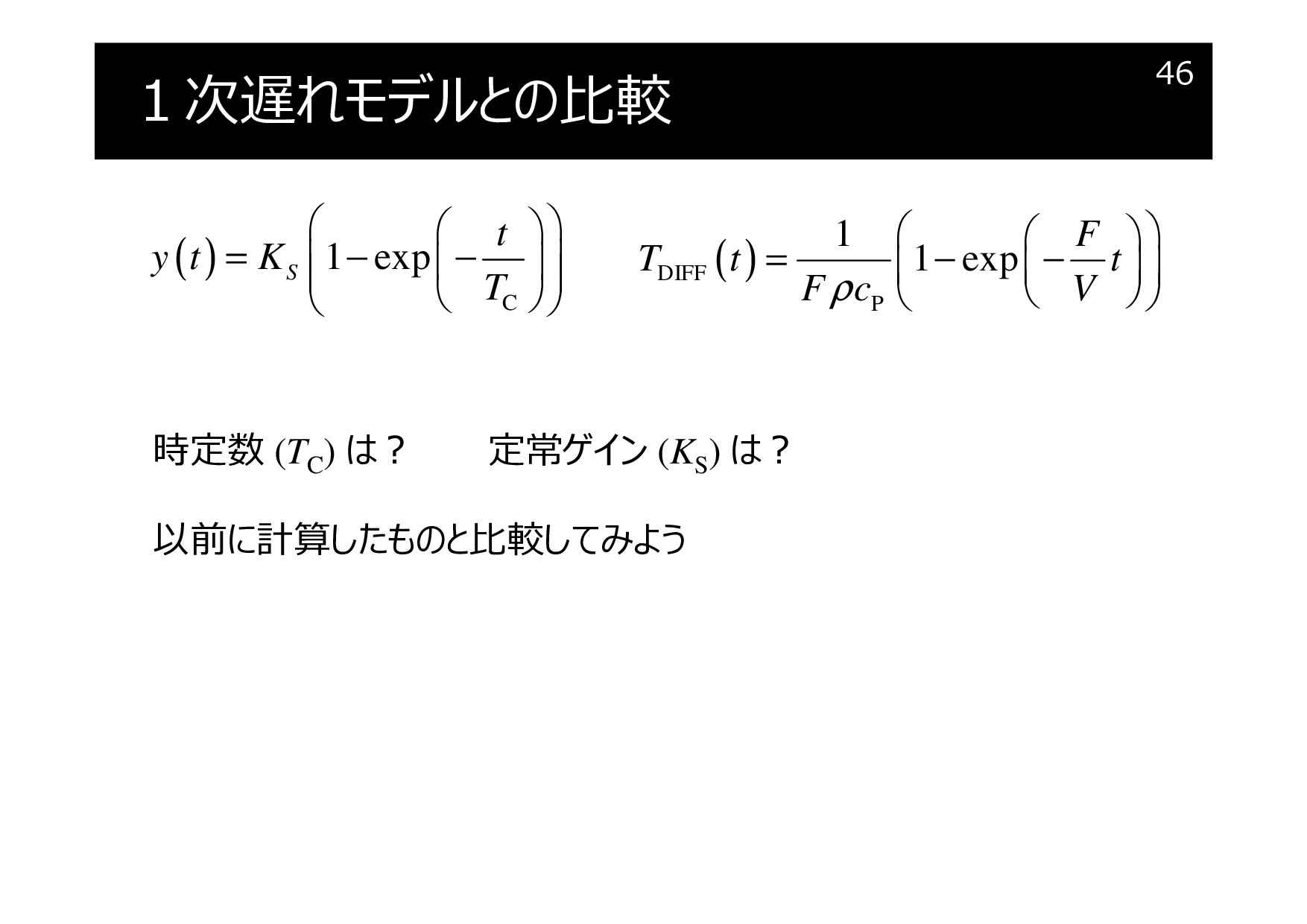
1次遅れモデルとの比較
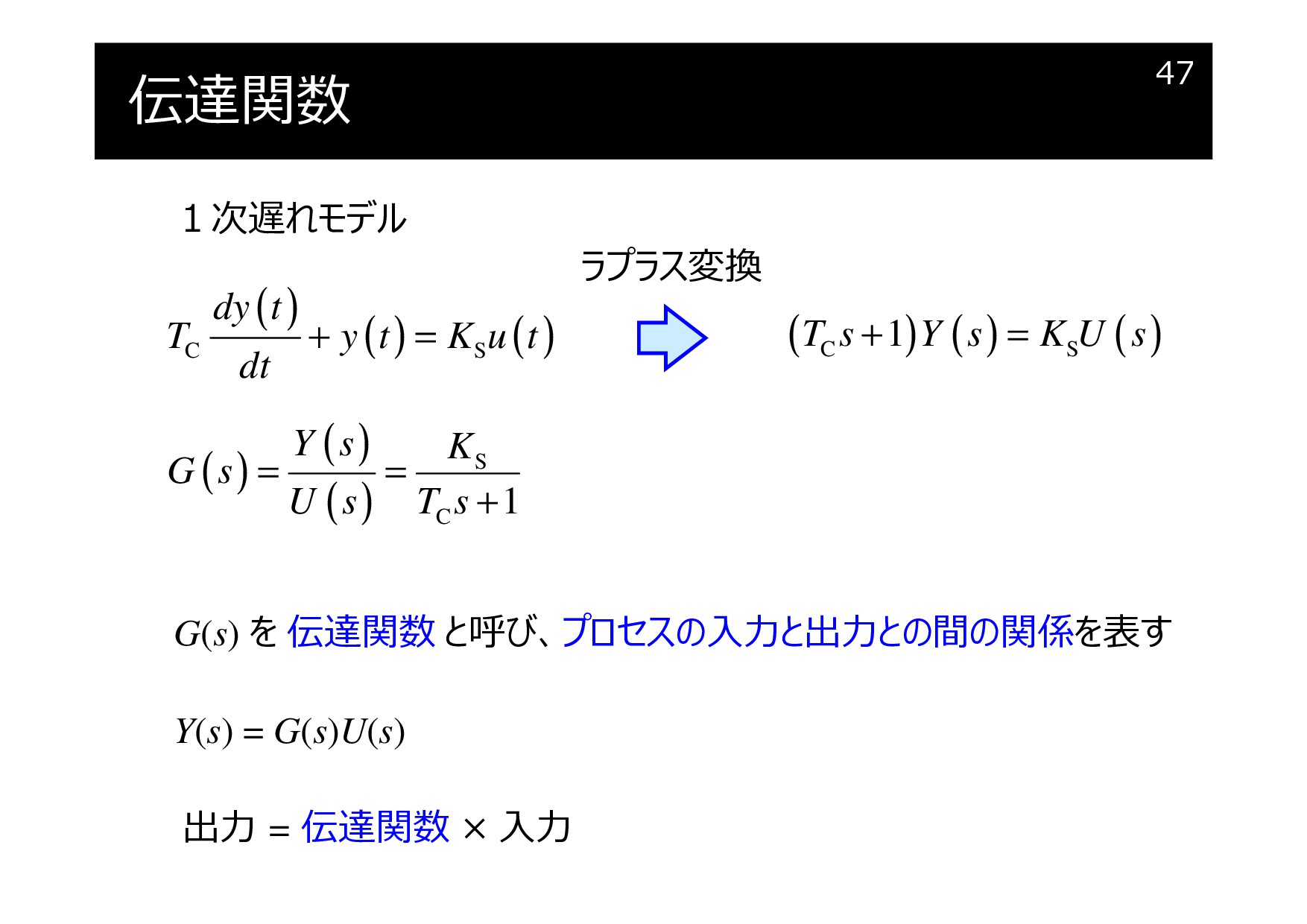
伝達関数
[練習] 1次遅れ+むだ時間 モデルの伝達関数は?
[練習] ラプラス変換
[練習] 2次遅れモデルの伝達関数は?
[練習] ラプラス変換
[練習] PID制御の伝達関数は?
[練習] ラプラス変換
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![タンクの液面高さ(液レベル)制御 5 A Fi Fo Fi [m3・s-1]︓入⼝流量 Fo [m3・s-1]︓出⼝流量 L](https://files.speakerdeck.com/presentations/7a28fbe517764dcf83f94936dfd6a364/slide_5.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![流体加熱プロセスのシミュレーション F [m3・s-1]︓入⼝流量・出⼝流量 = 0.00005 Ti [K]︓入⼝流体の温度 = 20 [℃]](https://files.speakerdeck.com/presentations/7a28fbe517764dcf83f94936dfd6a364/slide_10.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![[練習] 流体加熱プロセス 38 Q T, V, ρ, cP F, Ti](https://files.speakerdeck.com/presentations/7a28fbe517764dcf83f94936dfd6a364/slide_38.jpg){kind=link}
![[練習] 流体加熱プロセス 39 Q T, V, ρ, cP F, Ti](https://files.speakerdeck.com/presentations/7a28fbe517764dcf83f94936dfd6a364/slide_39.jpg){kind=link}
![[練習] 流体加熱プロセス 40 微分方程式など 答え 難しい ラプラス変換 普通の代数方程式 式変形後 ラプラス逆変換](https://files.speakerdeck.com/presentations/7a28fbe517764dcf83f94936dfd6a364/slide_40.jpg){kind=link}
![[練習] ラプラス変換 41 をラプラス変換すると、 ( ) ( ) ( )](https://files.speakerdeck.com/presentations/7a28fbe517764dcf83f94936dfd6a364/slide_41.jpg){kind=link}
![[練習] ステップ応答 42 ( ) 1 Q s s =](https://files.speakerdeck.com/presentations/7a28fbe517764dcf83f94936dfd6a364/slide_42.jpg){kind=link}
![[練習] ラプラス逆変換のための式変形 43 1 a b F F s s](https://files.speakerdeck.com/presentations/7a28fbe517764dcf83f94936dfd6a364/slide_43.jpg){kind=link}
![[練習] ラプラス逆変換 44 ( ) DIFF P P P 1](https://files.speakerdeck.com/presentations/7a28fbe517764dcf83f94936dfd6a364/slide_44.jpg){kind=link}
![[練習] 流体加熱プロセス 45 微分方程式など 答え 難しい ラプラス変換 普通の代数方程式 式変形後 ラプラス逆変換](https://files.speakerdeck.com/presentations/7a28fbe517764dcf83f94936dfd6a364/slide_45.jpg){kind=link}
{kind=link}
{kind=link}
![[練習] 1次遅れ+むだ時間 モデルの伝達関数は︖ tD [s]︓むだ時間 48 ( ) ( )](https://files.speakerdeck.com/presentations/7a28fbe517764dcf83f94936dfd6a364/slide_48.jpg){kind=link}
![[練習] ラプラス変換 49 ( ) ( ) ( ) (](https://files.speakerdeck.com/presentations/7a28fbe517764dcf83f94936dfd6a364/slide_49.jpg){kind=link}
![[練習] 2次遅れモデルの伝達関数は︖ 2次遅れモデル (2次遅れ系、2次遅れプロセス、2次遅れ要素) 減衰係数 DF の値 (の範囲) によって異なる挙動を示す •](https://files.speakerdeck.com/presentations/7a28fbe517764dcf83f94936dfd6a364/slide_50.jpg){kind=link}
![[練習] ラプラス変換 51 ( ) ( ) ( ) (](https://files.speakerdeck.com/presentations/7a28fbe517764dcf83f94936dfd6a364/slide_51.jpg){kind=link}
![[練習] PID制御の伝達関数は︖ PID制御 ただし、u(0) = 0, e(0) = 0 とする](https://files.speakerdeck.com/presentations/7a28fbe517764dcf83f94936dfd6a364/slide_52.jpg){kind=link}
![[練習] ラプラス変換 53 ( ) ( ) ( ) I](https://files.speakerdeck.com/presentations/7a28fbe517764dcf83f94936dfd6a364/slide_53.jpg){kind=link}