Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
HoloLens 2対応 MRTK v2 ハンズオン / HoloLens2 MRTKv2 H...
Search
HoloLab
December 05, 2019
Technology
4k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
HoloLens 2対応 MRTK v2 ハンズオン / HoloLens2 MRTKv2 Hands on
HoloLab
December 05, 2019
More Decks by HoloLab
See All by HoloLab
2021年のふりかえり / hololab-2021
hololab
1
1.9k
日本建築学会 情報シンポ2021 / AIJISA 2021
hololab
1
290
AR/VR/MRと3次元/BIMの取り組みご紹介 / SPAR2021
hololab
0
290
HoloLensで変わる行動のカタチ / Tech-on MeetUp Online 7
hololab
0
770
XR Kaigi 2021 ホロラボでのHoloLens 2アプリ 開発事例紹介 / XR Kaigi 2021
hololab
0
2.5k
HoloLensコミュニティ HoloMagiciansのご紹介 / DevRel Japan CONFERENCE
hololab
0
150
Azure Remote Renderingを活用した mixpace Remote Renderingのご紹介 / msdd2021 mrr
hololab
0
2k
第8回 全日本コンピュータビジョン勉強会 / Japan CV
hololab
0
1.2k
リモートワークの課題をモブワークで解決する試み / Scrum Fest Osaka
hololab
1
2.7k
Other Decks in Technology
See All in Technology
CIで使うClaude
iwatatomoya
0
290
AI Driven AI Governance
pict3
0
470
SREとQA 二人三脚で進めるSLO運用/sre-qa-slo
sugitak
0
780
アカウントが増えてからでは遅い? ~ マルチアカウント統制の勘所 ~
kenichinakamura
0
250
Kaggleで成長するために意識したこと
prgckwb
2
400
脱金融のフューチャー・デザイン / Future Design Beyond Finance
ks91
PRO
0
150
Oracle Exadata Database Service on Cloud@Customer X11M (ExaDB-C@C) サービス概要
oracle4engineer
PRO
2
8.4k
凡エンジニアがこの先生きのこるためには。〜TypeScript完全に理解したい〜
alchemy1115
2
300
あなたの『Site』はどこですか? — xREという考え方
miyamu
0
1.2k
個人開発で育てる「大規模設計の苗床」 - AI時代の1人開発から始める業務への知識接続 / The Seedbed for Large-Scale Design - From AI-Era Solo Projects to Professional Knowledge
bitkey
PRO
1
270
第67回コンピュータビジョン勉強会CVPR2026読会前編
tsukamotokenji
0
140
Genie Ontologyは銀の弾丸かを考える / Is Genie Ontology a Silver Bullet?
nttcom
0
380
Featured
See All Featured
Claude Code どこまでも/ Claude Code Everywhere
nwiizo
65
56k
The Success of Rails: Ensuring Growth for the Next 100 Years
eileencodes
47
8.2k
How To Speak Unicorn (iThemes Webinar)
marktimemedia
1
510
Building a A Zero-Code AI SEO Workflow
portentint
PRO
0
630
A brief & incomplete history of UX Design for the World Wide Web: 1989–2019
jct
2
420
Paper Plane (Part 1)
katiecoart
PRO
1
9.7k
Agile Actions for Facilitating Distributed Teams - ADO2019
mkilby
0
220
Easily Structure & Communicate Ideas using Wireframe
afnizarnur
194
17k
The Myth of the Modular Monolith - Day 2 Keynote - Rails World 2024
eileencodes
28
3.6k
Become a Pro
speakerdeck
PRO
31
6k
Breaking role norms: Why Content Design is so much more than writing copy - Taylor Woolridge
uxyall
0
340
The agentic SEO stack - context over prompts
schlessera
0
840
Transcript
Unity 2018.4.12f1, Visual Studio 2017/2019, MRTK v2.1.0対応 最終更新日 2019/12/05 株式会社ホロラボ
45分でHoloLens 2アプリ開発 1
タイムテーブル 1. 5分:オープニング 2. 5分:Unityプロジェクトの作成 3. 5分:Mixed Reality Toolkitの取り込み 4.
5分:プロジェクトの初期設定 5. 5分:オブジェクトの配置 6. 5分:ハンドジェスチャーでオブジェクトが落ちる処理を作成 7. 5分:実機デプロイ 8. 5分:空間マッピングの設定 9. 5分:アイトラッキング 10. 5分:クロージング 2
1.オープニング いまからやることをお伝えします。 3
事前準備 • HoloLens 2実機 • 開発PC • Windows 10(Home/Pro) •
Unity 2018.4.12f3(固定)のインストール(Personal可, Unity Hubより) • Visual Studio 2017 15.5.6以降(含UWP SDK)のインストール • Microsoft Mixed Reality Toolkit v2.1.0(固定)のダウンロード 4
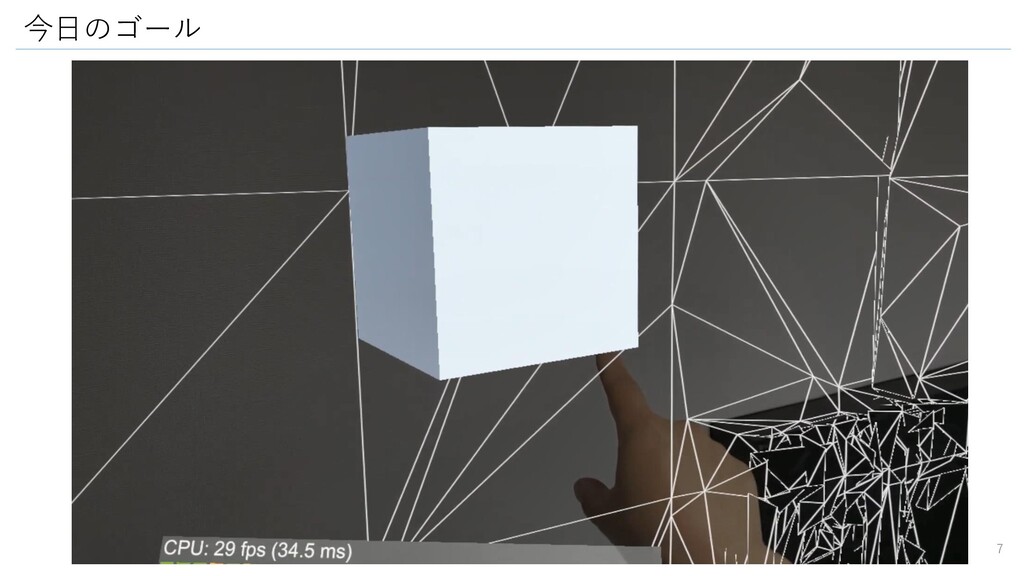
今日のゴール 7
2.Unityプロジェクトの作成 最初にUnityのプロジェクトを作りましょう。 8
Unityプロジェクトの作成(1) 1. Unity Hubを起動し[新規作成]から該当バージョン(2018.4.x)をクリックします。 9
Unityプロジェクトの作成(2) 1. プロジェクト名を入力します。 2. プロジェクトのフォルダを選択します。 3. [作成] をクリックします。 10 1
3 2
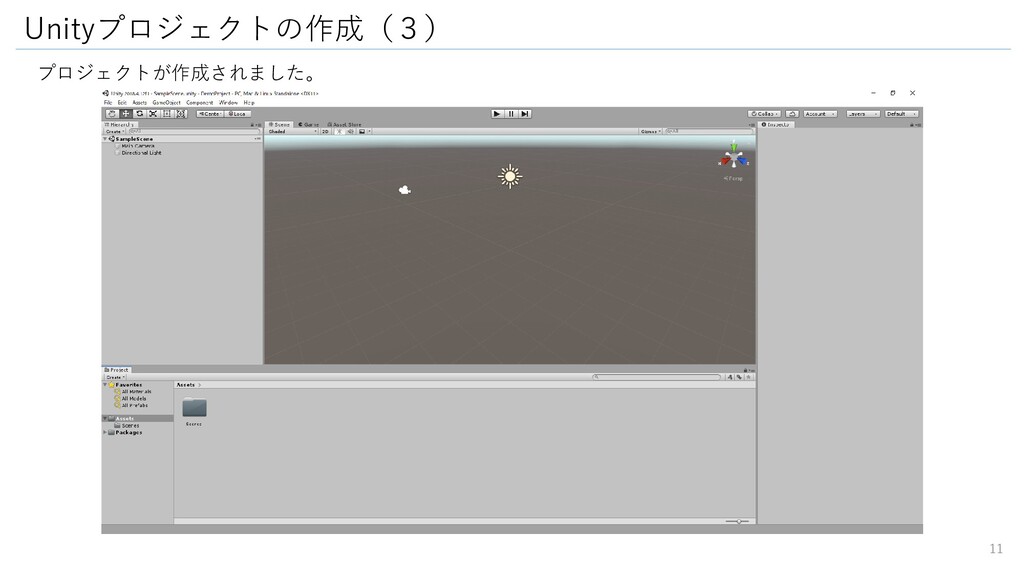
Unityプロジェクトの作成(3) プロジェクトが作成されました。 11
3. Mixed Reality Toolkitの取り込み 便利機能がたくさん入っているMixed Reality Toolkitを追加しましょう。 12
MixedRealityToolkit-Unityのダウンロード(1) 1. https://github.com/microsoft/MixedRealityToolkit-Unity/releases/tag/v2.1.0 から [Microsoft.MixedReality.Toolkit.Unity.Foundation.2.1.0.unitypackage] をダウンロードします。 13
1. Platformを[Universal Windows Platform]に変更します。 2. [Switch Platform]をクリックします。 ※MRTKがプロジェクト設定を変更するため、先にHoloLensのプラットフォームに変更する。 UWPビルドの設定 1
14 2
1. [Microsoft.MixedReality.Toolkit.Unity.Foundation.2.1.0.unitypackage]ファイルを Unity の [Project] ビューに入れます。 Mixed Reality Toolkitの取り込み(1) 15
Mixed Reality Toolkitの取り込み(2) 1. [Import Unity Package] ダイアログが表示されるので [Import] を押します。
16
Mixed Reality Toolkitの取り込み(3) 1. プロジェクト設定の変更を行うので[Apply]をクリックする。 17
MixedRealityToolkit-Unityの取り込み(3) MixedRealityToolkit-Unityが取り込めました。 18
オプション:Unityエディターの配置を変える(1) 1. 右上にある [Layout] をクリックします 2. [2 by 3] をクリックします。
1 19 2
オプション:Unityエディターの配置を変える(2) 1. [Project] ビューの右上の小さなボタン (ハンバーガーメニュー) をクリックします。 2. [One Column Layout]
をクリックします。 1 20 2
オプション:Unityエディターの配置を変える(3) [Project]ビューがツリー表示されるようになりました。 21
4. プロジェクトの初期設定 MixedRealityToolkitの機能を使ってプロジェクトの初期設定を行います。 22
プロジェクトの初期設定(1) 1. メニューの [Mixed Reality Toolkit] にある [Add to Scene
and Configure…] をクリックします。 23
プロジェクトの初期設定(2) 1. プロファイルの選択画面が表示されるので[DefaultHoloLens2ConfigurationProfile]を選択します。 24
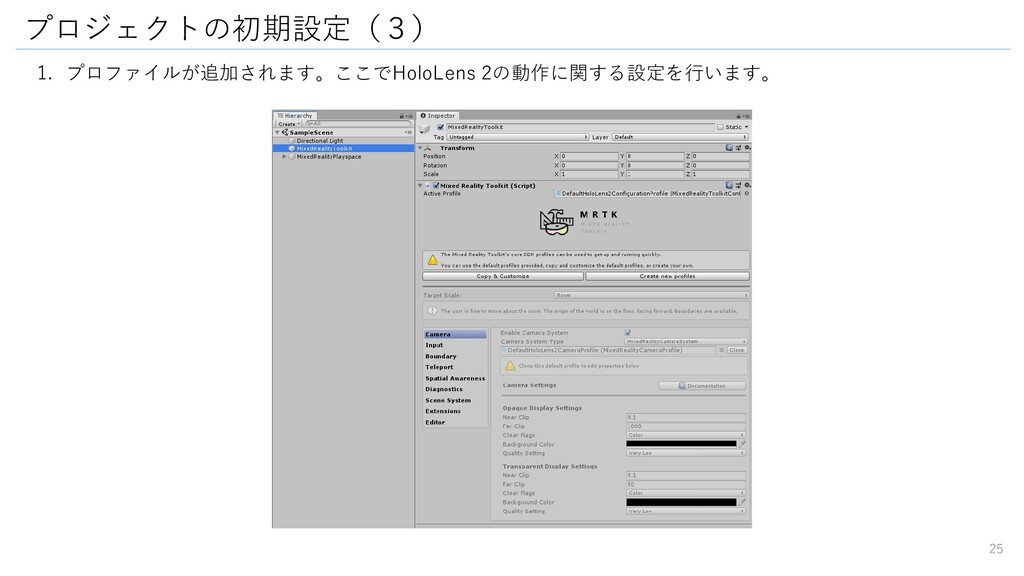
プロジェクトの初期設定(3) 1. プロファイルが追加されます。ここでHoloLens 2の動作に関する設定を行います。 25
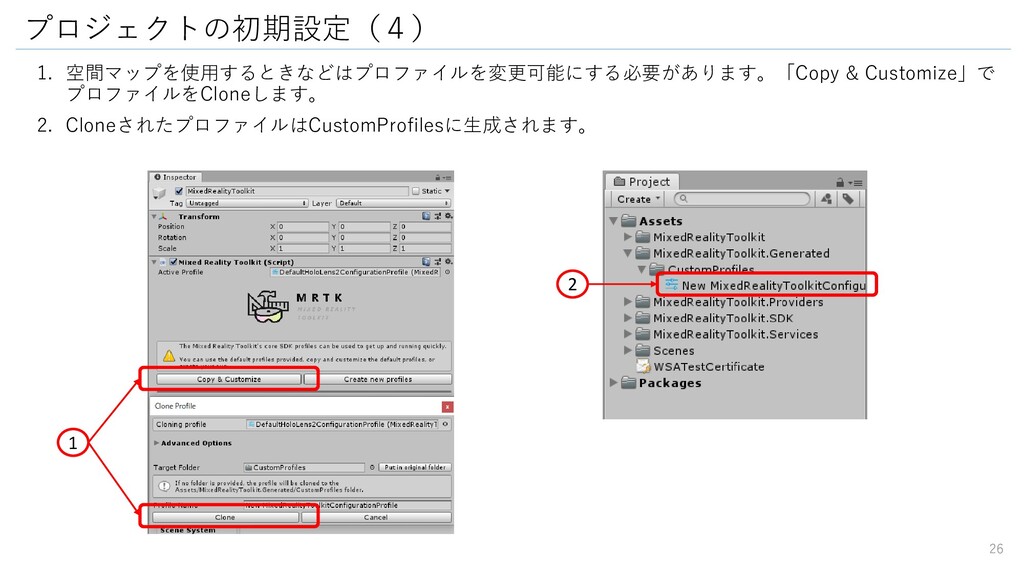
プロジェクトの初期設定(4) 1. 空間マップを使用するときなどはプロファイルを変更可能にする必要があります。「Copy & Customize」で プロファイルをCloneします。 2. CloneされたプロファイルはCustomProfilesに生成されます。 26 1
2
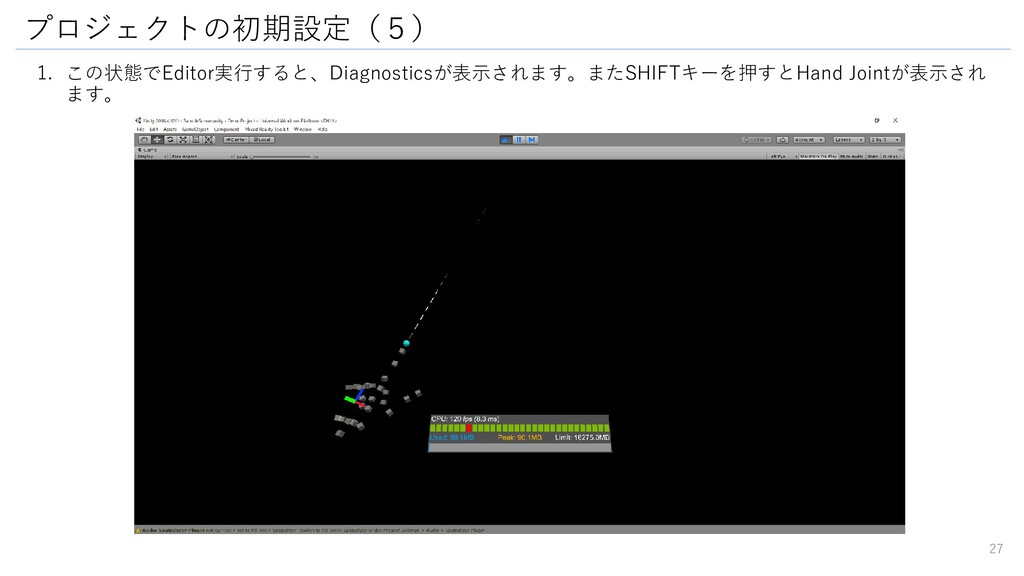
プロジェクトの初期設定(5) 1. この状態でEditor実行すると、Diagnosticsが表示されます。またSHIFTキーを押すとHand Jointが表示され ます。 27
5.オブジェクトの配置 HoloLensに表示する世界を作りましょう。 28
オブジェクトの配置(1) 1. [Hierarchy] ビューの何もないところで左クリックし、選択を外します。 2. [Hierarchy] ビューの何もないところで右クリックし、[3D Object]→[Cube] を選択します。 29
1 2
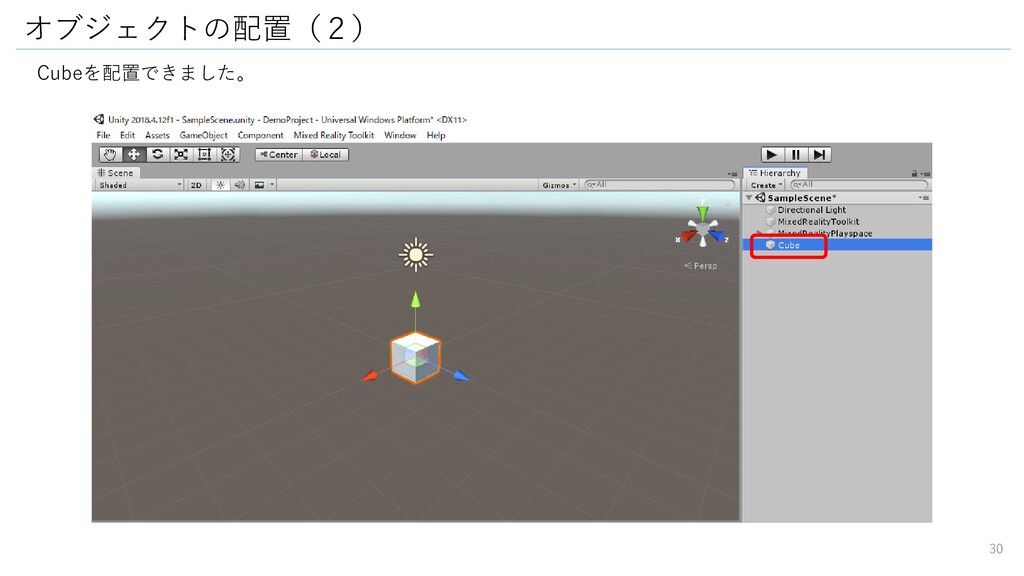
オブジェクトの配置(2) Cubeを配置できました。 30
Cubeの “Inspector” ビューを操作します。 1. [Position] を [0.5,0,1] に変更します。 2. [Scale]
を [0.2,0.2,0.2] に変更します。 単位はメートル(m)です。 オブジェクトの配置(3) 31 1 2
オブジェクトの配置(4) 1. 同様に “Hierarchy” ビューで [Sphere] を配置します。 2. [Position] を
[0,0,1] に変更します。 3. [Scale] を[0.2,0.2,0.2]に変更します。 32 1 2 3
オブジェクトの配置(5) 1. 最後に “Hierarchy” ビューで [Capsule] を配置します。 2. [Position] を
[-0.5,0,1]に変更します。 3. [Scale] を [0.2,0.2,0.2] に変更します。 33 1 2 3
6. ハンドジェスチャーでオブジェクトが 落ちる処理を作成 ジェスチャーを認識させてインタラクションの機能を作りましょう。 34
ハンドジェスチャーでオブジェクトが落ちるようにする(1) 1. Cubeに「Rigidbody」、「Near Interaction Touchable」、「Manipulation Hander」を追加する。 35
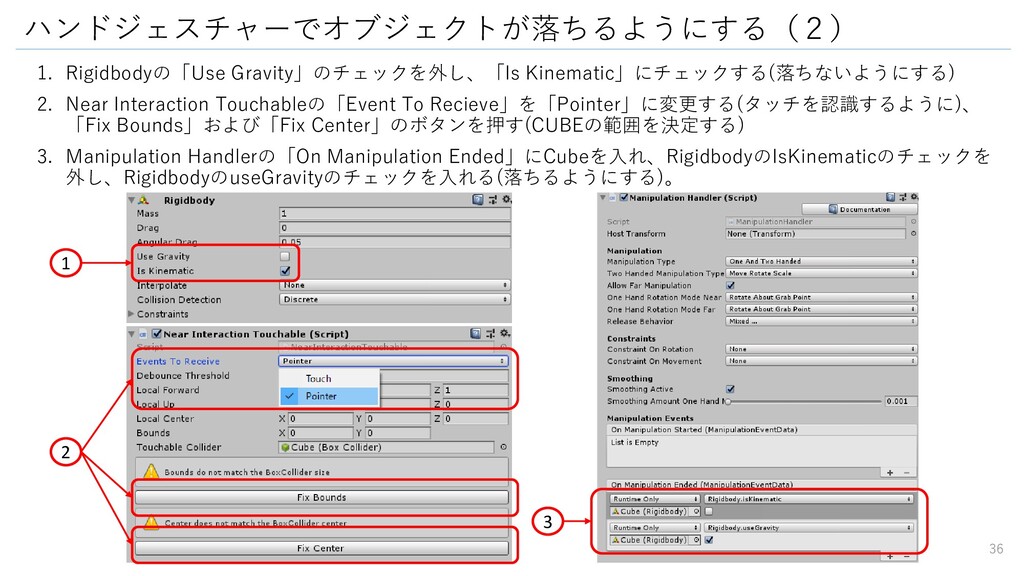
ハンドジェスチャーでオブジェクトが落ちるようにする(2) 1. Rigidbodyの「Use Gravity」のチェックを外し、「Is Kinematic」にチェックする(落ちないようにする) 2. Near Interaction Touchableの「Event To
Recieve」を「Pointer」に変更する(タッチを認識するように)、 「Fix Bounds」および「Fix Center」のボタンを押す(CUBEの範囲を決定する) 3. Manipulation Handlerの「On Manipulation Ended」にCubeを入れ、RigidbodyのIsKinematicのチェックを 外し、RigidbodyのuseGravityのチェックを入れる(落ちるようにする)。 36 1 2 3
1. 同じように [Sphere] と [Capsule] も設定することでハンドジェスチャーで落ちるようになります。 ハンドジェスチャーでオブジェクトが落ちるようにする(4) 38
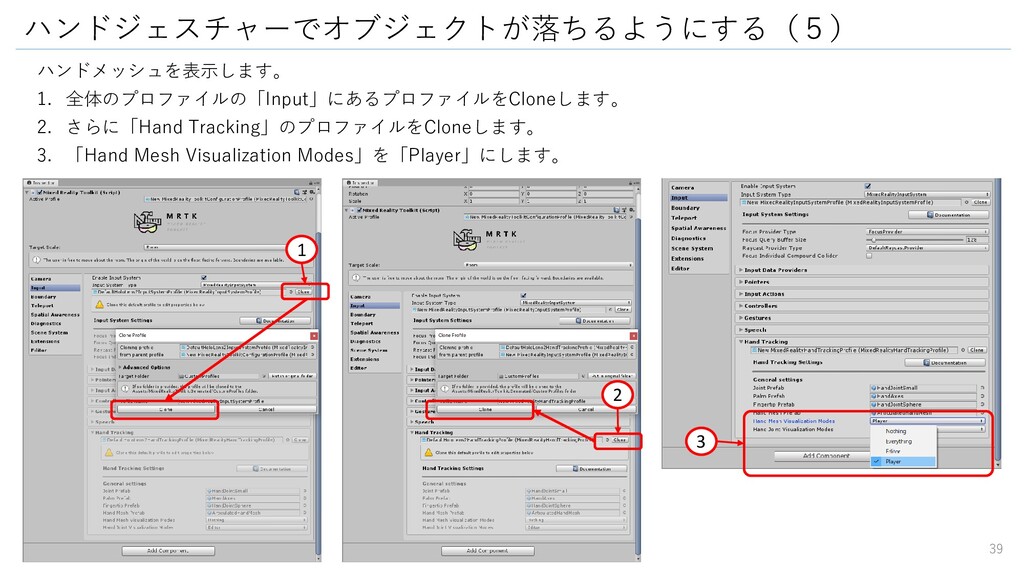
ハンドメッシュを表示します。 1. 全体のプロファイルの「Input」にあるプロファイルをCloneします。 2. さらに「Hand Tracking」のプロファイルをCloneします。 3. 「Hand Mesh Visualization
Modes」を「Player」にします。 ハンドジェスチャーでオブジェクトが落ちるようにする(5) 39 1 2 3
7. 実機デプロイ 実機で動かします。 40
1. メニューの [File | Build Settings] または [Shift+Ctrl+B]で “Build Settings”
画面を表示します。 2. [Add Open Scenes] ボタンで先ほど保存したシーンを追加します。 実機デプロイ(1) 2 41
実機デプロイ(2) 1. [Build] ボタンをクリックします。 2. 表示された Windows エクスプローラーで [新しいフォルダー] ボタンをクリックします。
3. フォルダー名を [UWP] とします。 4. [フォルダーの選択] ボタンをクリックするとビルドが開始します。 1 2 3 4 42
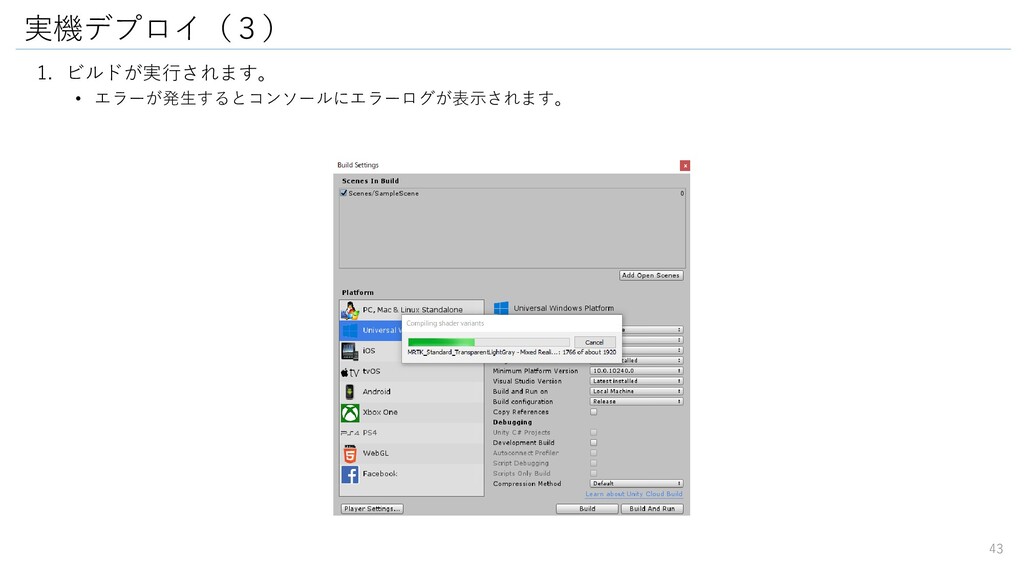
実機デプロイ(3) 1. ビルドが実行されます。 • エラーが発生するとコンソールにエラーログが表示されます。 43
実機デプロイ(3) 1. [プロジェクト名] フォルダーの [UWP] フォルダーにある [<プロジェクト名>.sln] ファイルを開きます。 44
実機デプロイ(4) 1. Visual Studioの構成部分を[Release],[ARM],[Device] に変更します。 2. USBケーブルをPCとHoloLens間で接続して[Device]ボタンをクリックします。 1 2 45
PINの設定 1. 初回のみVisual StudioとHoloLensでペアリングを求められます。 2. HoloLens 2の「設定」アプリの「更新とセキュリティ」にある「開発者向け」から「ペアリング」ボタンを 押し、表示される数字をVisual Studioに入力します。 46
8.空間マッピングの設定 空間マッピングを表示させてオブジェクトが落ちないようにしましょう。 49
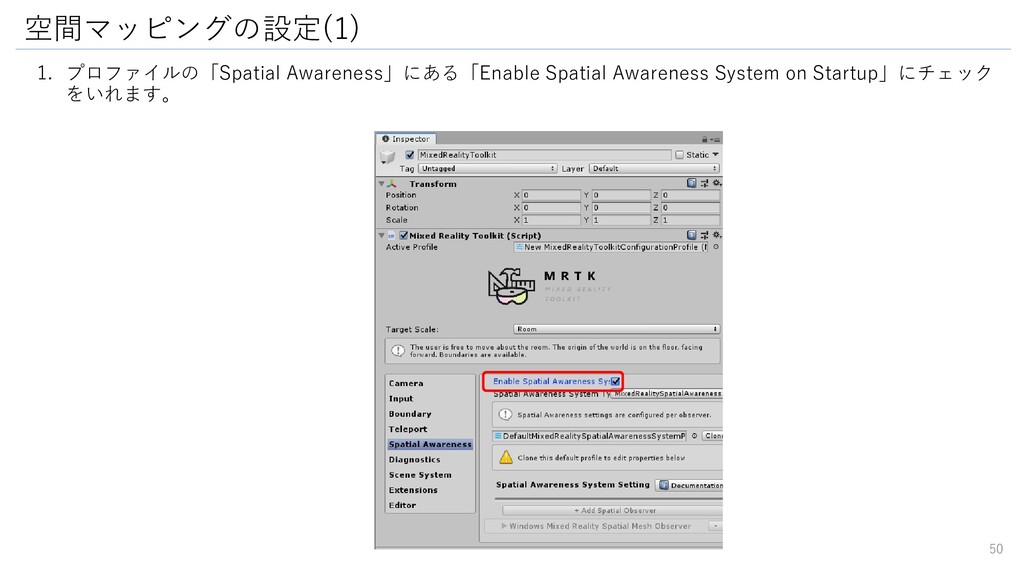
1. プロファイルの「Spatial Awareness」にある「Enable Spatial Awareness System on Startup」にチェック をいれます。 空間マッピングの設定(1)
50
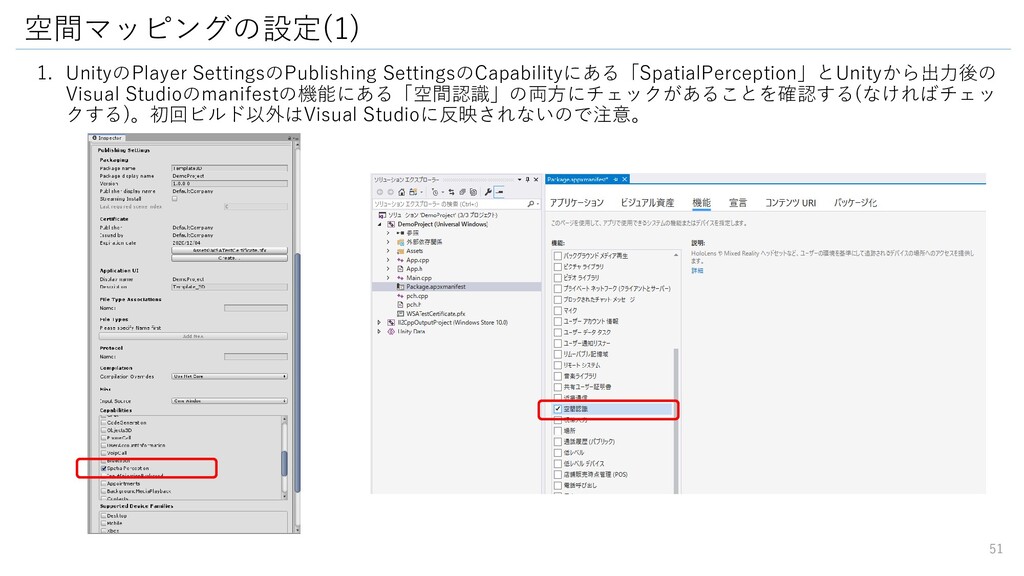
空間マッピングの設定(1) 51 1. UnityのPlayer SettingsのPublishing SettingsのCapabilityにある「SpatialPerception」とUnityから出力後の Visual Studioのmanifestの機能にある「空間認識」の両方にチェックがあることを確認する(なければチェッ クする)。初回ビルド以外はVisual Studioに反映されないので注意。
9. アイトラッキング 視線を使ったインタラクションを作ってみましょう 52
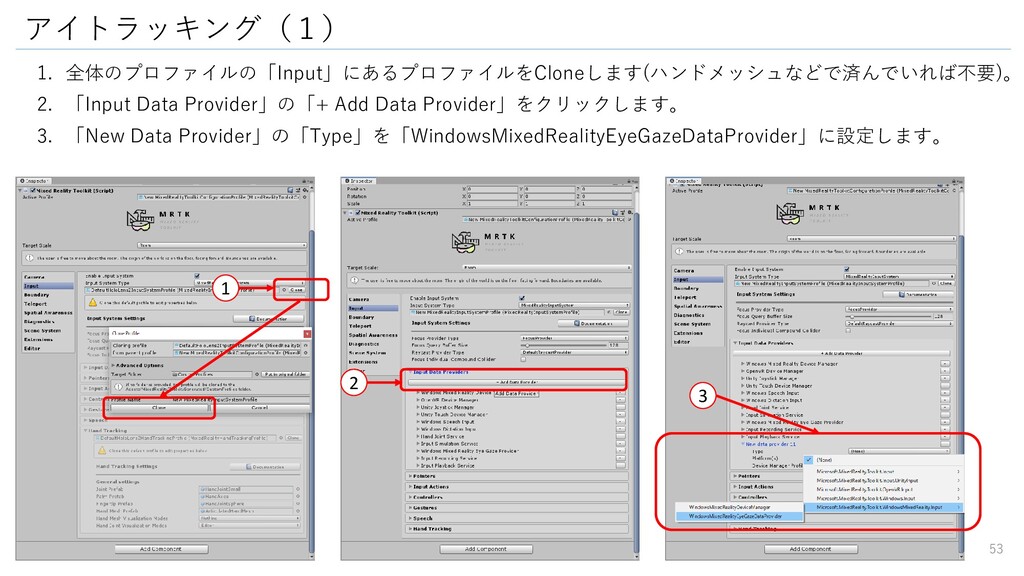
アイトラッキング(1) 1. 全体のプロファイルの「Input」にあるプロファイルをCloneします(ハンドメッシュなどで済んでいれば不要)。 2. 「Input Data Provider」の「+ Add Data Provider」をクリックします。
3. 「New Data Provider」の「Type」を「WindowsMixedRealityEyeGazeDataProvider」に設定します。 53 1 2 3
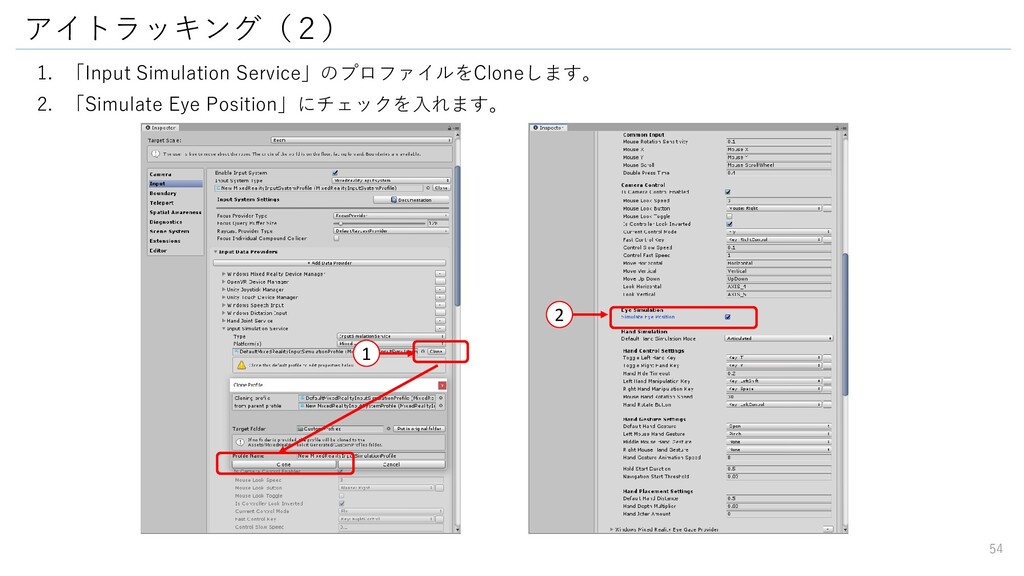
アイトラッキング(2) 1. 「Input Simulation Service」のプロファイルをCloneします。 2. 「Simulate Eye Position」にチェックを入れます。 54
1 2
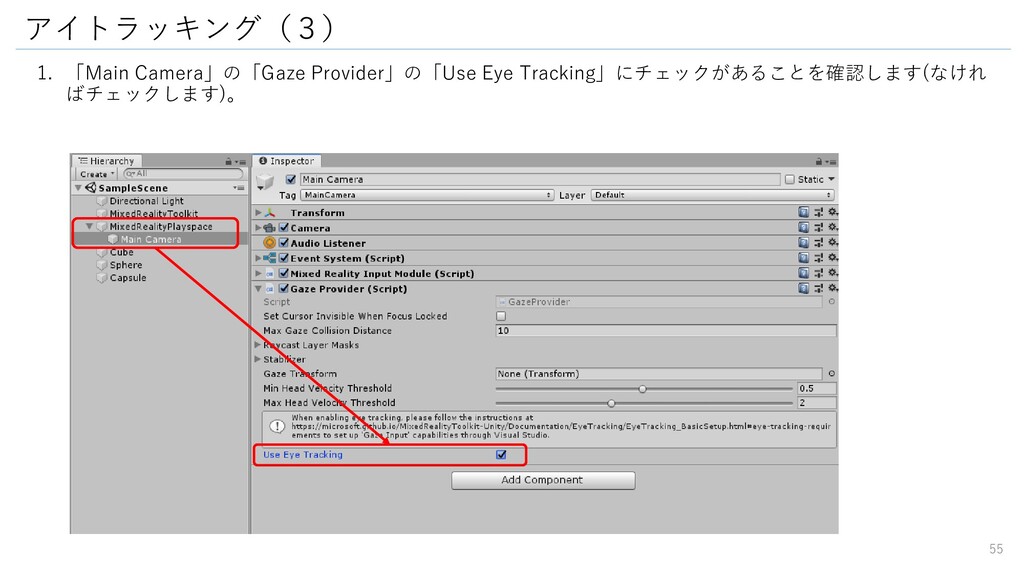
アイトラッキング(3) 1. 「Main Camera」の「Gaze Provider」の「Use Eye Tracking」にチェックがあることを確認します(なけれ ばチェックします)。 55
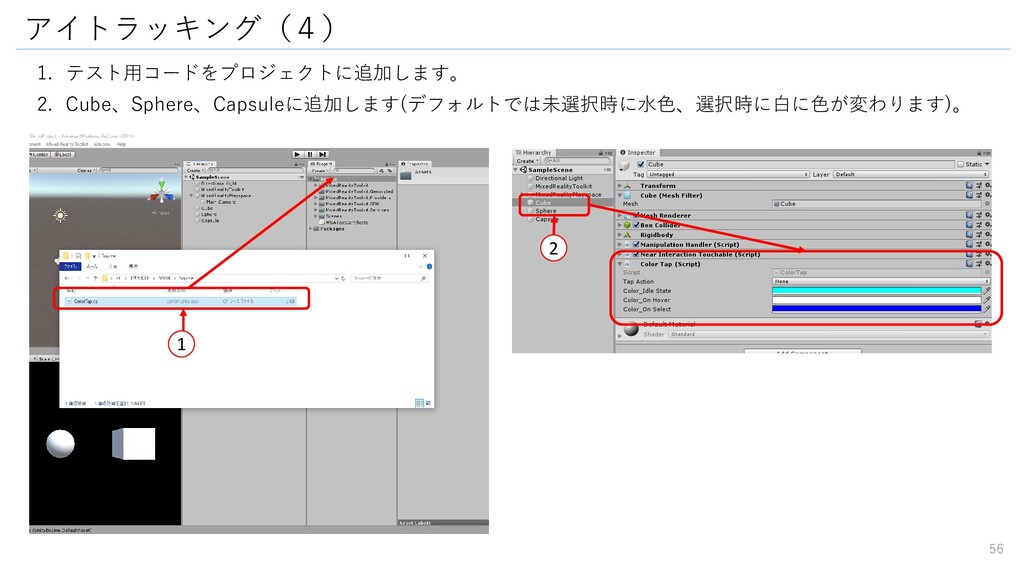
アイトラッキング(4) 1. テスト用コードをプロジェクトに追加します。 2. Cube、Sphere、Capsuleに追加します(デフォルトでは未選択時に水色、選択時に白に色が変わります)。 56 1 2
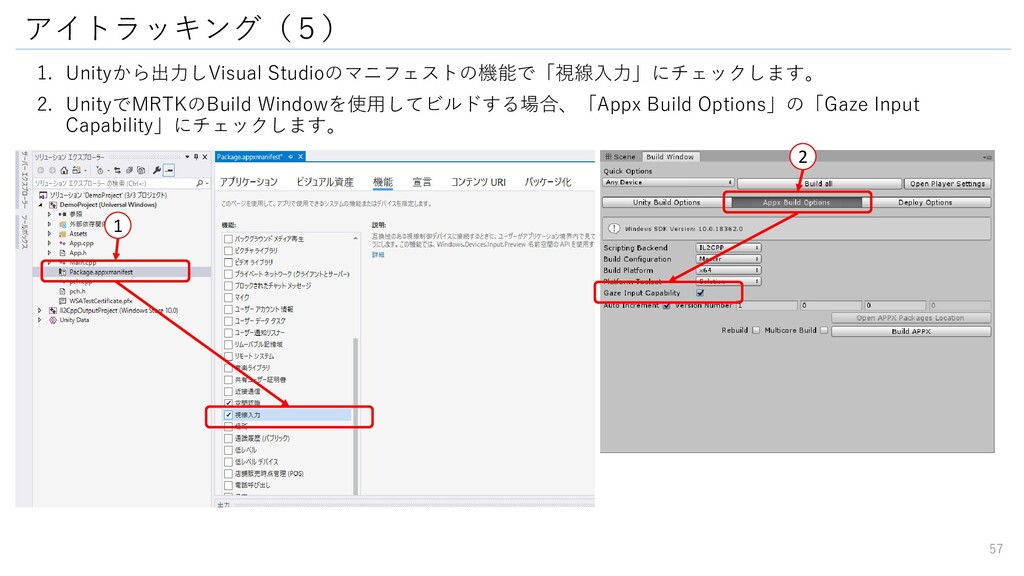
アイトラッキング(5) 1. Unityから出力しVisual Studioのマニフェストの機能で「視線入力」にチェックします。 2. UnityでMRTKのBuild Windowを使用してビルドする場合、「Appx Build Options」の「Gaze Input
Capability」にチェックします。 57 1 2
10.クロージング 58
本日使用したHoloLens固有の機能 • 〇:視線入力(Eye tracking) • 〇:ハンドジェスチャー入力(Hand gesture input) • -:音声入力(Voice
input) • -:空間(3次元)音響(Spatial sound) • 〇:空間マッピング(Spatial awareness) 59
60
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Unityプロジェクトの作成(1) 1. Unity Hubを起動し[新規作成]から該当バージョン(2018.4.x)をクリックします。 9](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_6.jpg){kind=link}
![Unityプロジェクトの作成(2) 1. プロジェクト名を入力します。 2. プロジェクトのフォルダを選択します。 3. [作成] をクリックします。 10 1](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_7.jpg){kind=link}
{kind=link}
{kind=link}
![MixedRealityToolkit-Unityのダウンロード(1) 1. https://github.com/microsoft/MixedRealityToolkit-Unity/releases/tag/v2.1.0 から [Microsoft.MixedReality.Toolkit.Unity.Foundation.2.1.0.unitypackage] をダウンロードします。 13](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_10.jpg){kind=link}
![1. Platformを[Universal Windows Platform]に変更します。 2. [Switch Platform]をクリックします。 ※MRTKがプロジェクト設定を変更するため、先にHoloLensのプラットフォームに変更する。 UWPビルドの設定 1](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_11.jpg){kind=link}
![1. [Microsoft.MixedReality.Toolkit.Unity.Foundation.2.1.0.unitypackage]ファイルを Unity の [Project] ビューに入れます。 Mixed Reality Toolkitの取り込み(1) 15](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_12.jpg){kind=link}
![Mixed Reality Toolkitの取り込み(2) 1. [Import Unity Package] ダイアログが表示されるので [Import] を押します。](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_13.jpg){kind=link}
![Mixed Reality Toolkitの取り込み(3) 1. プロジェクト設定の変更を行うので[Apply]をクリックする。 17](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_14.jpg){kind=link}
{kind=link}
![オプション:Unityエディターの配置を変える(1) 1. 右上にある [Layout] をクリックします 2. [2 by 3] をクリックします。](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_16.jpg){kind=link}
![オプション:Unityエディターの配置を変える(2) 1. [Project] ビューの右上の小さなボタン (ハンバーガーメニュー) をクリックします。 2. [One Column Layout]](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_17.jpg){kind=link}
![オプション:Unityエディターの配置を変える(3) [Project]ビューがツリー表示されるようになりました。 21](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_18.jpg){kind=link}
{kind=link}
![プロジェクトの初期設定(1) 1. メニューの [Mixed Reality Toolkit] にある [Add to Scene](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_20.jpg){kind=link}
![プロジェクトの初期設定(2) 1. プロファイルの選択画面が表示されるので[DefaultHoloLens2ConfigurationProfile]を選択します。 24](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_21.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![オブジェクトの配置(1) 1. [Hierarchy] ビューの何もないところで左クリックし、選択を外します。 2. [Hierarchy] ビューの何もないところで右クリックし、[3D Object]→[Cube] を選択します。 29](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_26.jpg){kind=link}
{kind=link}
![Cubeの “Inspector” ビューを操作します。 1. [Position] を [0.5,0,1] に変更します。 2. [Scale]](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_28.jpg){kind=link}
![オブジェクトの配置(4) 1. 同様に “Hierarchy” ビューで [Sphere] を配置します。 2. [Position] を](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_29.jpg){kind=link}
![オブジェクトの配置(5) 1. 最後に “Hierarchy” ビューで [Capsule] を配置します。 2. [Position] を](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_30.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![1. 同じように [Sphere] と [Capsule] も設定することでハンドジェスチャーで落ちるようになります。 ハンドジェスチャーでオブジェクトが落ちるようにする(4) 38](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_34.jpg){kind=link}
{kind=link}
{kind=link}
![1. メニューの [File | Build Settings] または [Shift+Ctrl+B]で “Build Settings”](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_37.jpg){kind=link}
![実機デプロイ(2) 1. [Build] ボタンをクリックします。 2. 表示された Windows エクスプローラーで [新しいフォルダー] ボタンをクリックします。](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_38.jpg){kind=link}
{kind=link}
![実機デプロイ(3) 1. [プロジェクト名] フォルダーの [UWP] フォルダーにある [<プロジェクト名>.sln] ファイルを開きます。 44](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_40.jpg){kind=link}
![実機デプロイ(4) 1. Visual Studioの構成部分を[Release],[ARM],[Device] に変更します。 2. USBケーブルをPCとHoloLens間で接続して[Device]ボタンをクリックします。 1 2 45](https://files.speakerdeck.com/presentations/4349328190074485b9a54bfd59c6e45a/slide_41.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}