Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
RPNを完全に理解しよう
Search
Ryunosuke-Ikeda
July 28, 2021
Technology
370
1
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
RPNを完全に理解しよう
あまり詳しく解説されないFaster R-CNNのRPN(Region Proposal Network)を具体的なデータの形状を確認しながら理解しよう.
Ryunosuke-Ikeda
July 28, 2021
More Decks by Ryunosuke-Ikeda
See All by Ryunosuke-Ikeda
映像情報を活用した次世代のAIアシスタントシステム"Salieri" 資料
imr0305
0
190
Open Hack U 発表資料(チームうどん)
imr0305
0
62
JPHacks2021 発表資料(チームうどん)
imr0305
0
56
自己紹介スライド
imr0305
1
2.1k
技育展2021 発表資料(チームうどん)
imr0305
0
48
RLSP2021資料
imr0305
0
230
技育展2020 登壇資料(チームうどん)
imr0305
0
200
Other Decks in Technology
See All in Technology
Claude Code公式skillで 自分の仕事を少しずつ手放そう!(Claude Code開発ノウハウ大公開スペシャル by クラスメソッド)
kaym
1
280
SREとQA 二人三脚で進めるSLO運用/sre-qa-slo
sugitak
0
450
ZOZOTOWNの進化と信頼性を両立する負荷試験
zozotech
PRO
2
160
「早く出す」より「事業に効く」 ── 顧客の業務サイクルから逆算するAI時代の二重ループ開発と「変化の設計者」 / devsumi2026
rakus_dev
1
220
アカウントが増えてからでは遅い? ~ マルチアカウント統制の勘所 ~
kenichinakamura
0
220
プロンプト_きのこカンファレンス2026_LT
yurufuwahealer
0
150
インフラ寄りSREでも 開発に踏み出せる〜境界を越えてユーザー体験に向き合いたい〜
sansantech
PRO
2
3.7k
生成AIの活用/high_school2026
okana2ki
0
130
AICoEでAIネイティブ組織への進化
yukiogawa
0
160
オブザーバビリティ、本当に活用できてる? 〜API連携×生成AIで成熟度を自動評価〜
dmmsre
1
3k
cccccc
moznion
0
1.9k
[2026-07-15] AI Ready なはずだったアーキテクチャと、見えてきた課題・次に目指す状態
wxyzzz
4
2.7k
Featured
See All Featured
Exploring anti-patterns in Rails
aemeredith
3
440
The Power of CSS Pseudo Elements
geoffreycrofte
82
6.4k
The Hidden Cost of Media on the Web [PixelPalooza 2025]
tammyeverts
2
340
Building Flexible Design Systems
yeseniaperezcruz
330
40k
Designing for Performance
lara
611
70k
Ecommerce SEO: The Keys for Success Now & Beyond - #SERPConf2024
aleyda
1
2.1k
Introduction to Domain-Driven Design and Collaborative software design
baasie
1
890
The Cult of Friendly URLs
andyhume
79
6.9k
Noah Learner - AI + Me: how we built a GSC Bulk Export data pipeline
techseoconnect
PRO
0
220
A Tale of Four Properties
chriscoyier
163
24k
Max Prin - Stacking Signals: How International SEO Comes Together (And Falls Apart)
techseoconnect
PRO
0
200
[SF Ruby Conf 2025] Rails X
palkan
2
1.2k
Transcript
RPNを完全に理解しよう Ryunosuke Ikeda 1
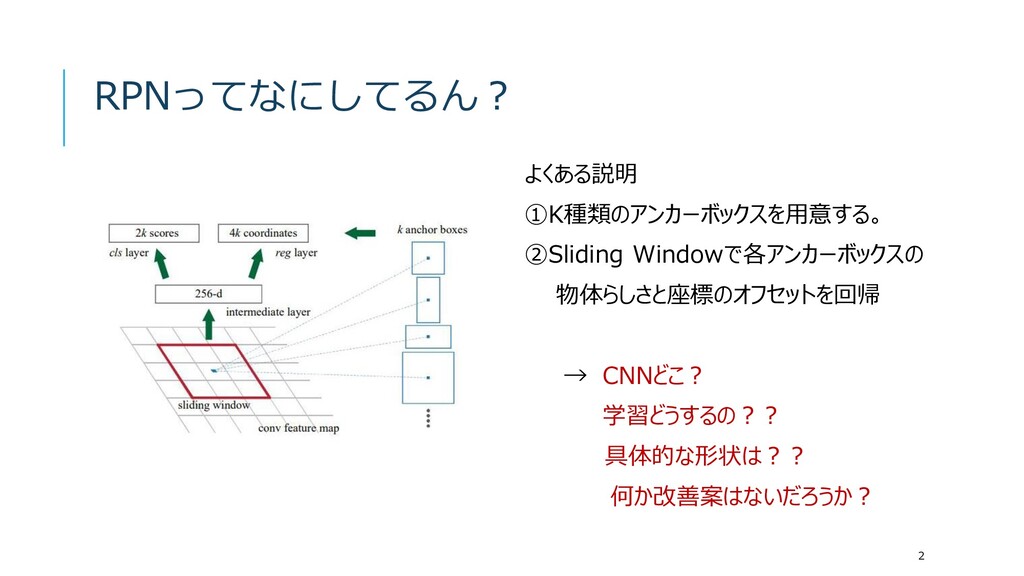
よくある説明 ①K種類のアンカーボックスを用意する。 ②Sliding Windowで各アンカーボックスの 物体らしさと座標のオフセットを回帰 → CNNどこ? 学習どうするの?? 具体的な形状は?? 何か改善案はないだろうか?
RPNってなにしてるん? 2
・Torch VisionのFaster R-CNNのコードをベースにRPNの詳しい処理手順を 確認した。 ・入力画像は3*1280*720とする。 ・バッチサイズは1とする。 前提条件 3
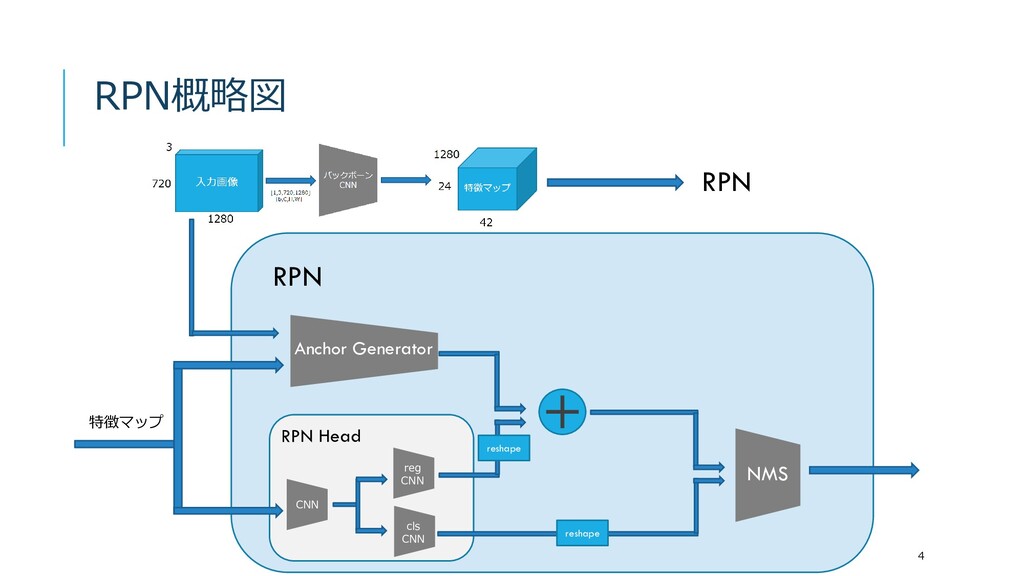
RPN概略図 RPN CNN reg CNN cls CNN RPN Head Anchor
Generator NMS RPN 特徴マップ reshape reshape 4
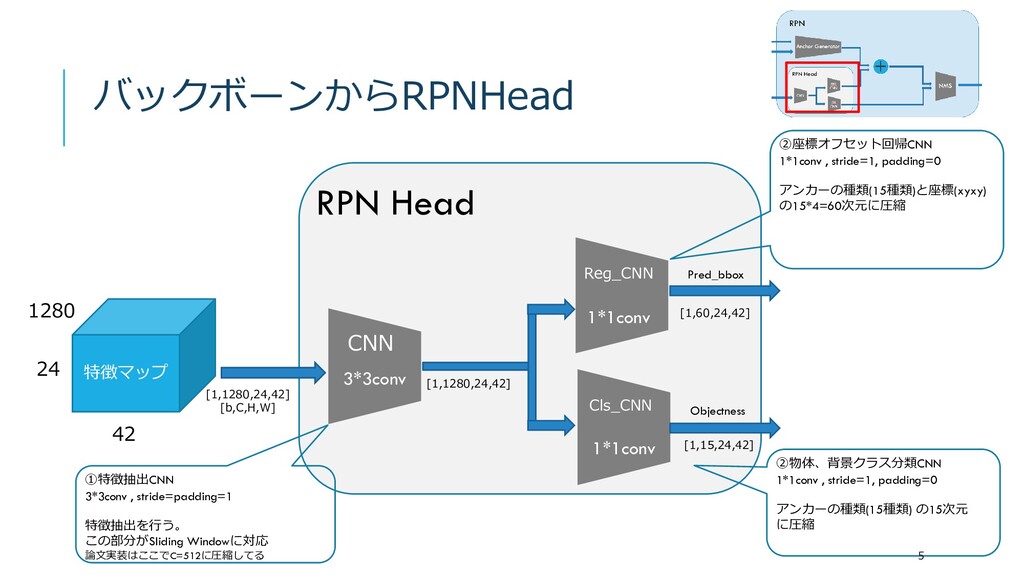
バックボーンからRPNHead 特徴マップ 42 24 1280 CNN Reg_CNN Cls_CNN RPN Head
3*3conv [1,1280,24,42] [b,C,H,W] 1*1conv 1*1conv [1,1280,24,42] [1,60,24,42] [1,15,24,42] ①特徴抽出CNN 3*3conv , stride=padding=1 特徴抽出を行う。 この部分がSliding Windowに対応 論文実装はここでC=512に圧縮してる ②座標オフセット回帰CNN 1*1conv , stride=1, padding=0 アンカーの種類(15種類)と座標(xyxy) の15*4=60次元に圧縮 ②物体、背景クラス分類CNN 1*1conv , stride=1, padding=0 アンカーの種類(15種類) の15次元 に圧縮 Objectness Pred_bbox 5
出力形状の意味(Cls_CNN) 24 (H) 42 (W) 15 (アンカーの種類) 右図のオレンジの値は特徴マップの[1,1]の部分に1種類目の アンカーボックスを適用した時のObjectnessを直接予測している。
同様に緑の部分は特徴マップ[1,42]の部分に2種類目の アンカーボックスを適用した時のObjectnessを予測 各アンカーの特徴量を抽出しCNNに入力しているわけではない Cls_CNNの出力 ・ アンカーのイメージ (実際は特徴マップ) ・ 6
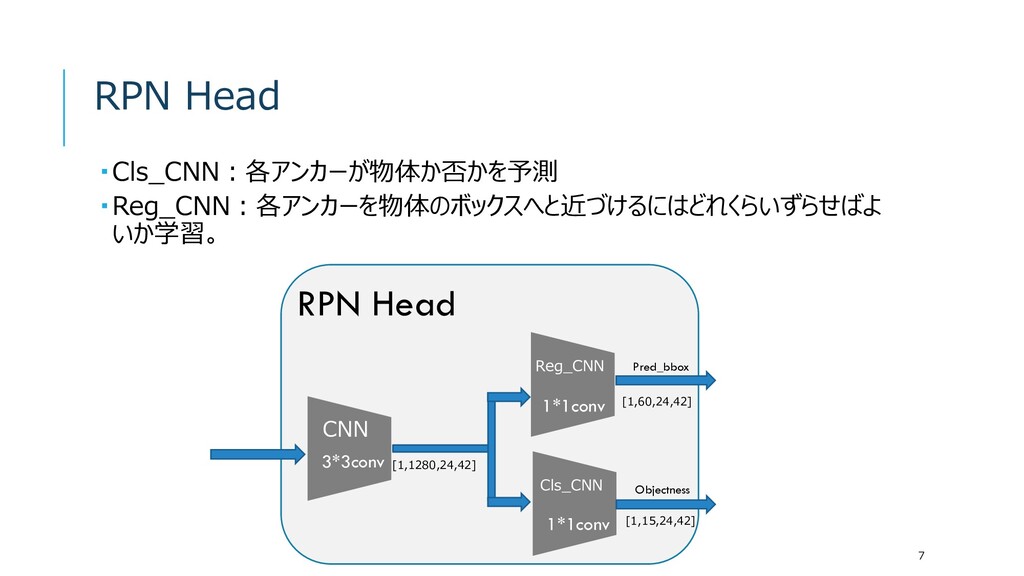
RPN Head Cls_CNN:各アンカーが物体か否かを予測 Reg_CNN:各アンカーを物体のボックスへと近づけるにはどれくらいずらせばよ いか学習。 CNN Reg_CNN Cls_CNN
RPN Head 3*3conv 1*1conv 1*1conv [1,1280,24,42] [1,60,24,42] [1,15,24,42] Objectness Pred_bbox 7
Anchor Generator 特徴マップの各要素にアンカーを配置した際のアンカーの座標値を取得。 この際の座標値は入力画像のスケールのもの 出力形状は[15*24*42,4]=[15120,4] Anchor Generator
入力画像 特徴マップ [1,1280,24,42] [1,3,720,1280] [15120,4] Anchors 8
Proposalsの作成 Reg_CNNで取得したアンカーボックス座標のオフセット値(相対座標)を アンカーボックスに足し合わせる。 →ずらした後の絶対座標が得られる。 Anchors Pred_bbox [1,60,24,42] [15120,4] [15120,4]
reshape [15120,4] Proposals 9
NMS NMSにかける前にObjectnessの上位2000個のproposalsを抽出 抽出した2000個に対してNMSをかけてboxを削減 Objectness [1,15,24,42] [15120,4] reshape [15120,1]
Proposals NMS Objectnessの 上位2000位の Proposalsを抽出 [2000,4] [2000-N,4] 10
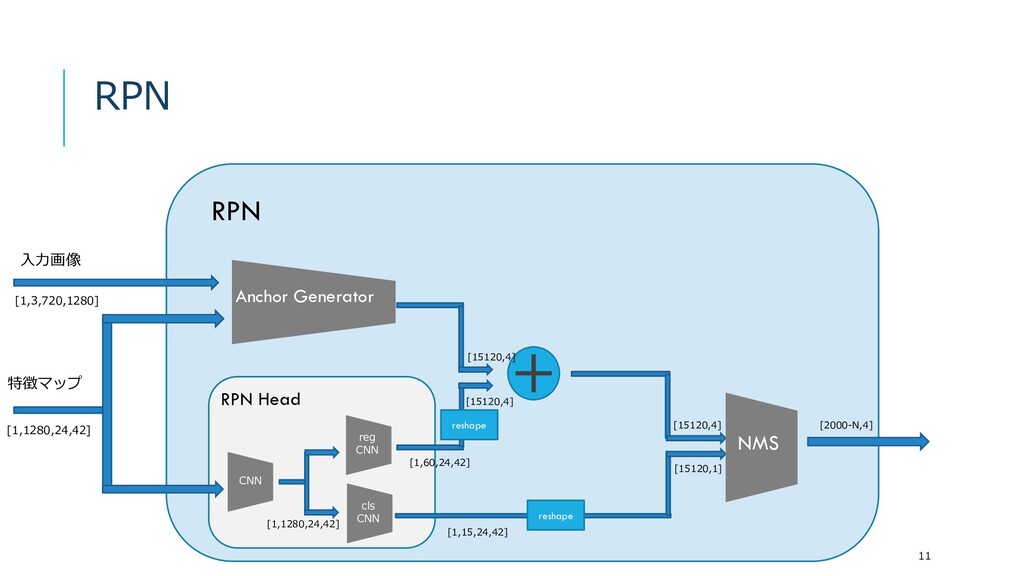
RPN CNN reg CNN cls CNN RPN Head Anchor Generator
NMS RPN 特徴マップ reshape reshape 入力画像 [1,1280,24,42] [1,3,720,1280] [1,1280,24,42] [1,60,24,42] [1,15,24,42] [15120,4] [15120,4] [15120,4] [15120,1] [2000-N,4] 11
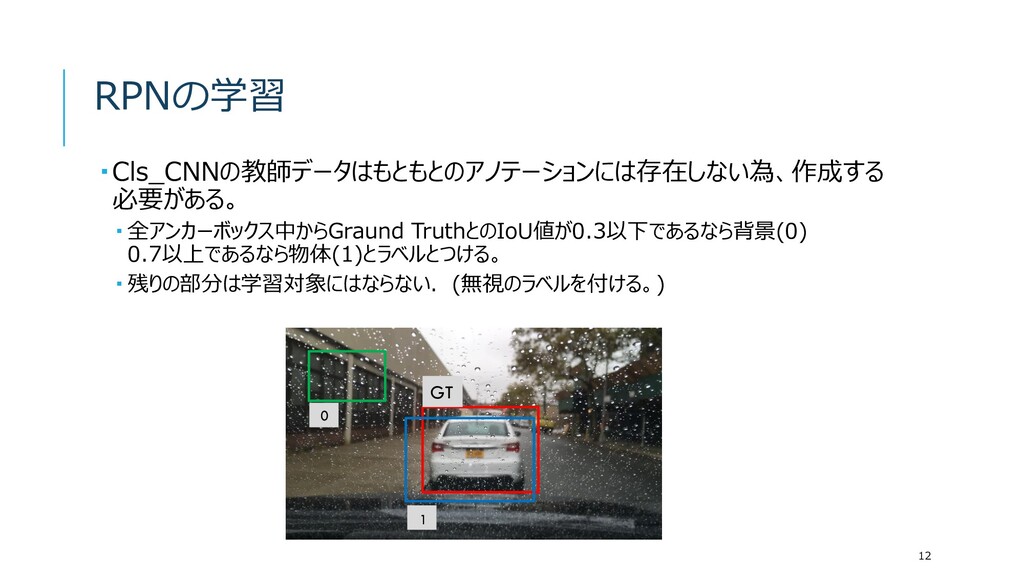
RPNの学習 Cls_CNNの教師データはもともとのアノテーションには存在しない為、作成する 必要がある。 全アンカーボックス中からGraund TruthとのIoU値が0.3以下であるなら背景(0) 0.7以上であるなら物体(1)とラベルとつける。 残りの部分は学習対象にはならない.(無視のラベルを付ける。)
GT 1 0 12
Lossの測り方(Regの例) NMSにかける前のpropとobjectnessを用いてLossを測る。 作成したTargetに物体ラベルがついているインデックスの値を抽出し、 そのインデックスの予測値とのLossを測る。 [112,85,115,95] Target_bbox [20,30,50,40] …
… Pred_bbox [24,32,50,42] [110,80,120,90] GTが 物体ラベルである インデックスの値 L1smooth Loss イメージ (実際は正規化された値) 13
14 Ryunosuke Ikeda Tokyo Denki University M1 THANK YOU!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![出力形状の意味(Cls_CNN) 24 (H) 42 (W) 15 (アンカーの種類) 右図のオレンジの値は特徴マップの[1,1]の部分に1種類目の アンカーボックスを適用した時のObjectnessを直接予測している。](https://files.speakerdeck.com/presentations/990d2254a7b34704854575e0082984fe/slide_5.jpg){kind=link}
{kind=link}
![Anchor Generator 特徴マップの各要素にアンカーを配置した際のアンカーの座標値を取得。 この際の座標値は入力画像のスケールのもの 出力形状は[15*24*42,4]=[15120,4] Anchor Generator](https://files.speakerdeck.com/presentations/990d2254a7b34704854575e0082984fe/slide_7.jpg){kind=link}
![Proposalsの作成 Reg_CNNで取得したアンカーボックス座標のオフセット値(相対座標)を アンカーボックスに足し合わせる。 →ずらした後の絶対座標が得られる。 Anchors Pred_bbox [1,60,24,42] [15120,4] [15120,4]](https://files.speakerdeck.com/presentations/990d2254a7b34704854575e0082984fe/slide_8.jpg){kind=link}
![NMS NMSにかける前にObjectnessの上位2000個のproposalsを抽出 抽出した2000個に対してNMSをかけてboxを削減 Objectness [1,15,24,42] [15120,4] reshape [15120,1]](https://files.speakerdeck.com/presentations/990d2254a7b34704854575e0082984fe/slide_9.jpg){kind=link}
{kind=link}
{kind=link}
![Lossの測り方(Regの例) NMSにかける前のpropとobjectnessを用いてLossを測る。 作成したTargetに物体ラベルがついているインデックスの値を抽出し、 そのインデックスの予測値とのLossを測る。 [112,85,115,95] Target_bbox [20,30,50,40] …](https://files.speakerdeck.com/presentations/990d2254a7b34704854575e0082984fe/slide_12.jpg){kind=link}
{kind=link}