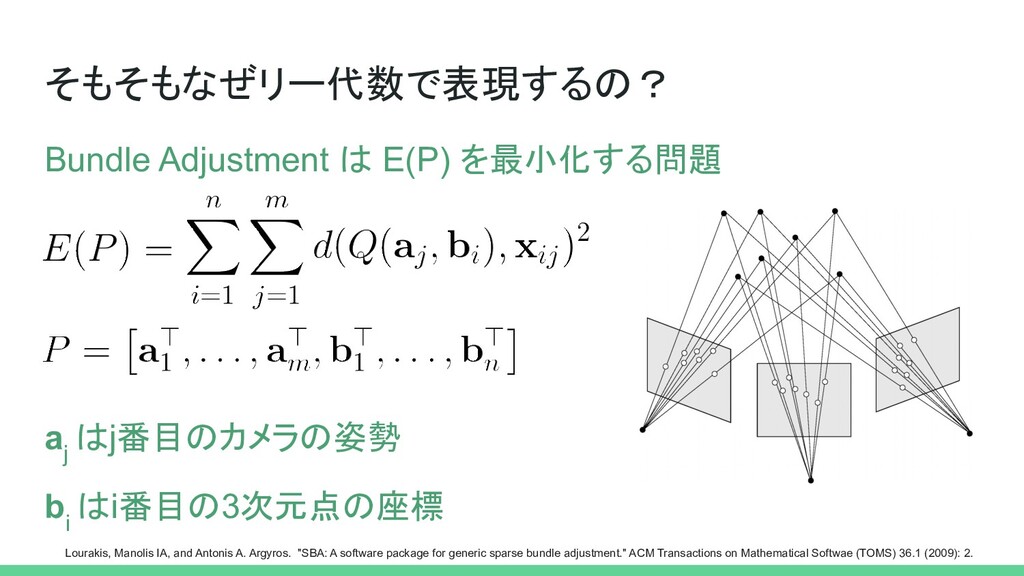
i はi番目の3次元点の座標 Lourakis, Manolis IA, and Antonis A. Argyros. "SBA: A software package for generic sparse bundle adjustment." ACM Transactions on Mathematical Softwae (TOMS) 36.1 (2009): 2.
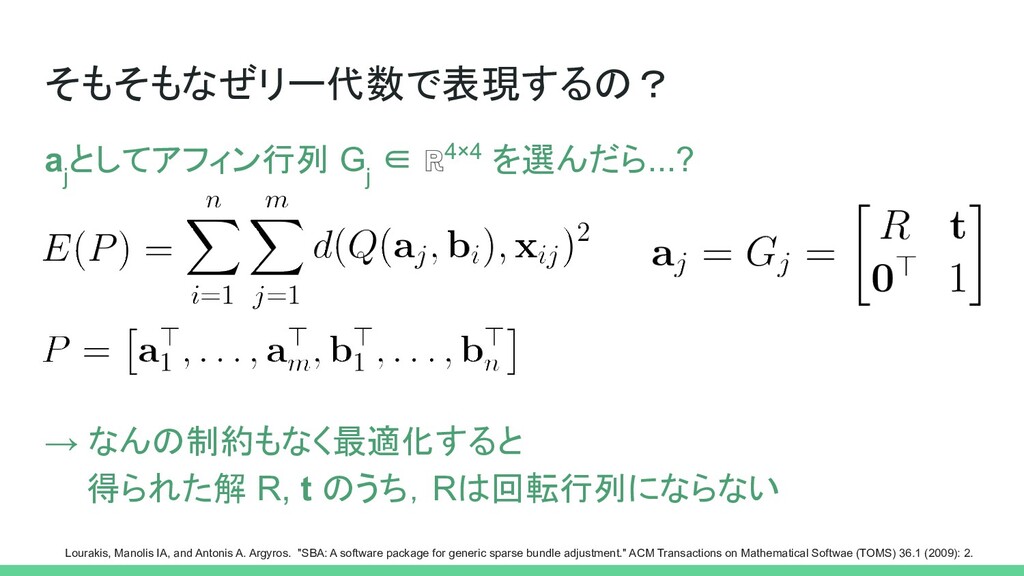
IA, and Antonis A. Argyros. "SBA: A software package for generic sparse bundle adjustment." ACM Transactions on Mathematical Softwae (TOMS) 36.1 (2009): 2. そもそもなぜリー代数で表現するの? → なんの制約もなく最適化すると 得られた解 R, t のうち,Rは回転行列にならない
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}