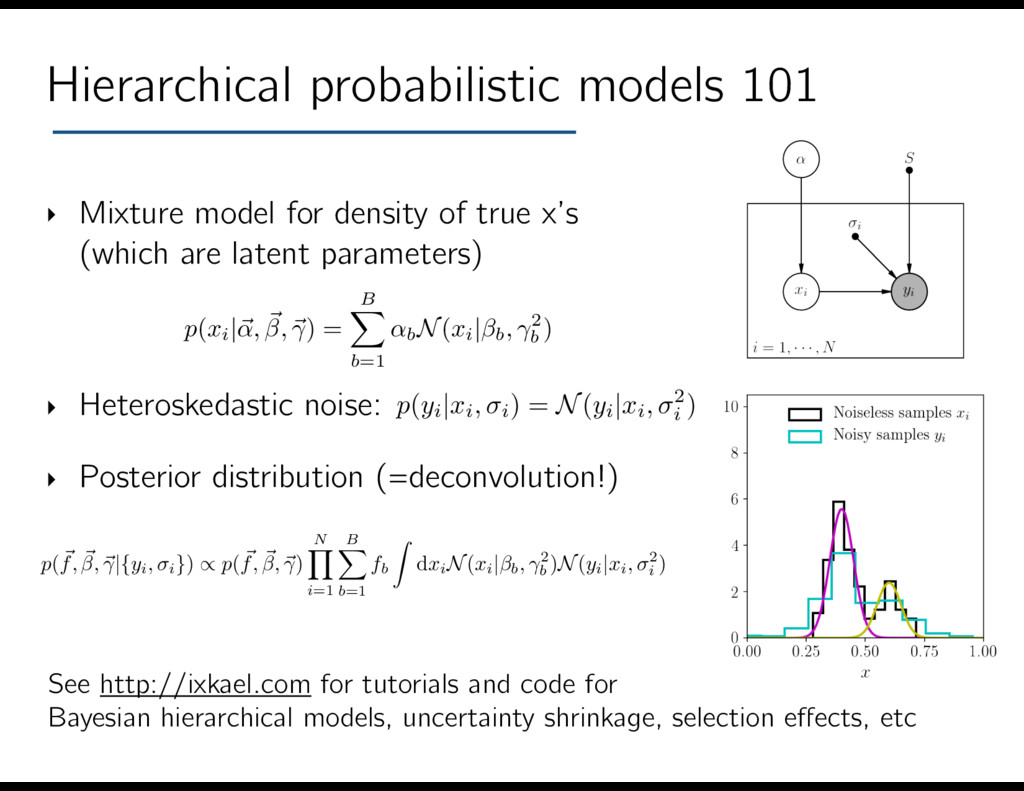
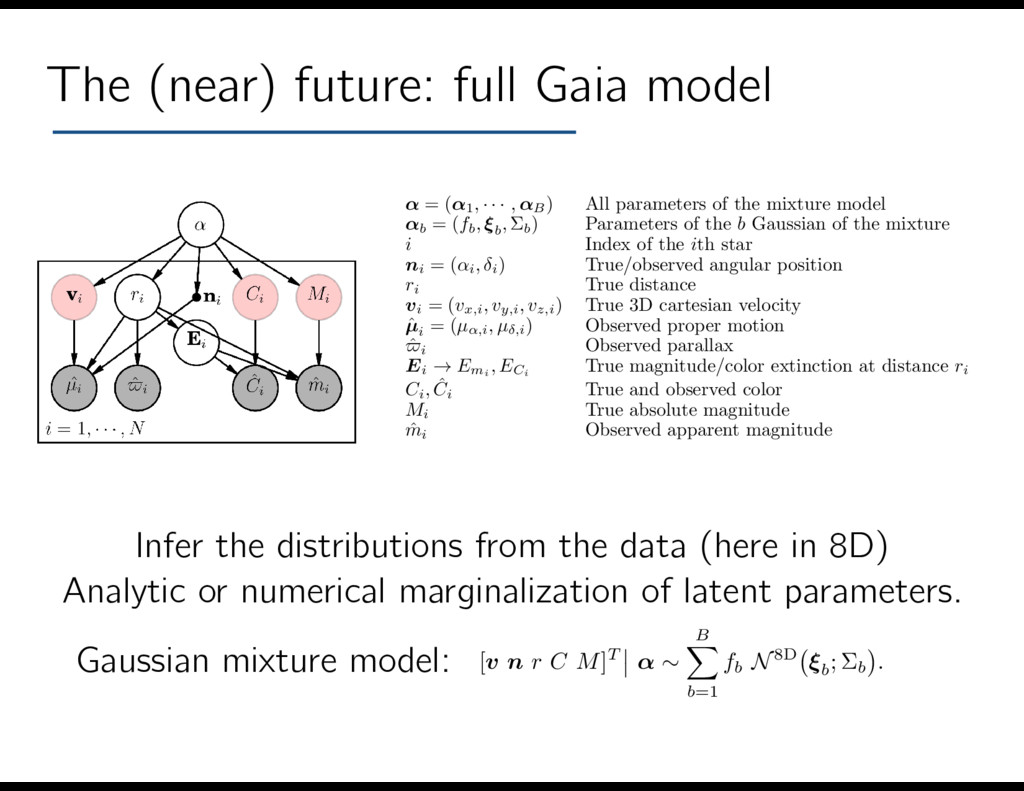
note describing a model of the positions, velocities, proper motions, and colors of stars. If the likelihood function of those is a multivariate Gaussian (which is the case for Gaia, with strong correlations between parallaxes and proper motions), one can adopte a Gaussian Mixture model for their distributions (joint or split) and analytically marginalize over the true velocity, and colors of each star. As a result, one only need to sample the parameters of the mixture model, as well as the distance and extinction of each star. The e↵ective likelihood function is a simple multivariate Gaussian, derived below. This opens the possibility to implement this model in fast inference/modelling languages like Tensorflow, Stan, or Edward. A summary of the notation is provided in the table below. Apologies if there are typos in the text or equations! ↵ = (↵1, · · · , ↵B ) All parameters of the mixture model ↵b = (fb, ⇠b , ⌃b ) Parameters of the b Gaussian of the mixture i Index of the ith star ni = (↵i, i ) True/observed angular position ri True distance vi = (vx,i, vy,i, vz,i ) True 3D cartesian velocity ˆ µi = (µ↵,i, µ ,i ) Observed proper motion ˆ $i Observed parallax Ei ! Emi , ECi True magnitude/color extinction at distance ri Ci, ˆ Ci True and observed color Mi True absolute magnitude ˆ mi Observed apparent magnitude 1 Model Our population/distribution model in 8-dimensional space (3D positions and velocities, plus 2D color–magnitude diagram) is a Gaussian mixture, [v n r C M]T ↵ ⇠ B X b=1 fb N8D ⇠b ; ⌃b . (1) The priors will be specified later. Typically, one would adopt conjugate priors which greatly simply the inference, i.e. a Dirichlet prior on the amplitudes {fb }, and multivariate Gaussian for each mean ⇠b , and Wishard for the covariance ⌃b . The full 5-dimensional likelihood, accounting for any covariance between the measurements, is [ˆ µ↵,i ˆ µ ,i ˆ $i ˆ Ci ˆ mi ]T vi, ni, ri, Ei, Ci, Mi ⇠ N5D ⇣ i ; i ⌘ (2) with the model vector 2 3 and proper motions), one can adopte a Gaussian Mixture model for their distributions (joint marginalize over the true velocity, and colors of each star. As a result, one only need to sam mixture model, as well as the distance and extinction of each star. The e↵ective likelihood funct Gaussian, derived below. This opens the possibility to implement this model in fast inference Tensorflow, Stan, or Edward. A summary of the notation is provided in the table below. Apologies if there are typos in t ↵ = (↵1, · · · , ↵B ) All parameters of the mix ↵b = (fb, ⇠b , ⌃b ) Parameters of the b Gauss i Index of the ith star ni = (↵i, i ) True/observed angular po ri True distance vi = (vx,i, vy,i, vz,i ) True 3D cartesian velocity ˆ µi = (µ↵,i, µ ,i ) Observed proper motion ˆ $i Observed parallax Ei ! Emi , ECi True magnitude/color ext Ci, ˆ Ci True and observed color Mi True absolute magnitude ˆ mi Observed apparent magni 1 Model Our population/distribution model in 8-dimensional space (3D positions and velocities, plus 2D is a Gaussian mixture, [v n r C M]T ↵ ⇠ B X b=1 fb N8D ⇠b ; ⌃b . The priors will be specified later. Typically, one would adopt conjugate priors which greatly s Dirichlet prior on the amplitudes {fb }, and multivariate Gaussian for each mean ⇠b , and Wish The full 5-dimensional likelihood, accounting for any covariance between the measurements Gaussian mixture model: Infer the distributions from the data (here in 8D) Analytic or numerical marginalization of latent parameters.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}