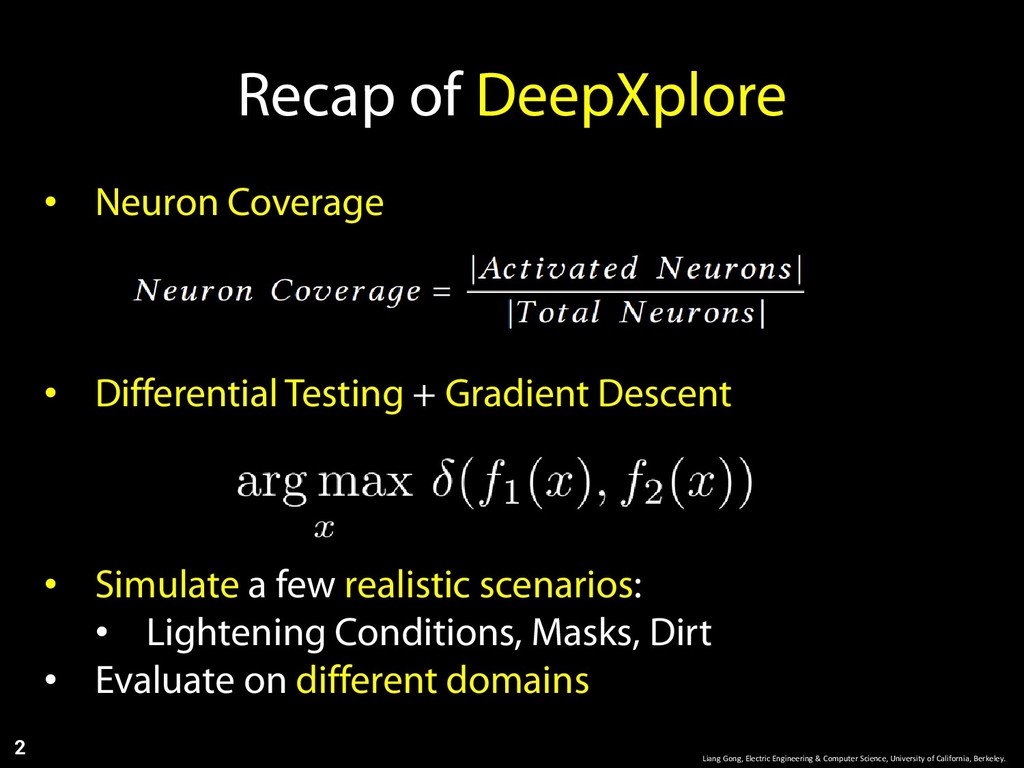
University of California, Berkeley. • Neuron Coverage • Differential Testing + Gradient Descent • Simulate a few realistic scenarios: • Lightening Conditions, Masks, Dirt • Evaluate on different domains 2
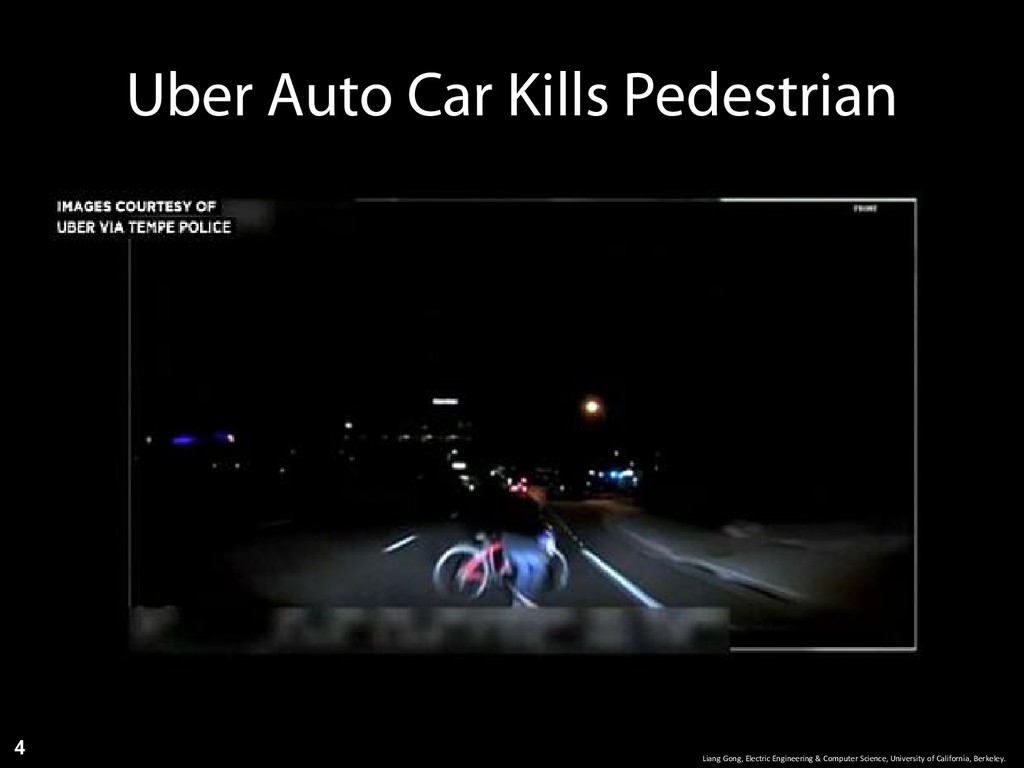
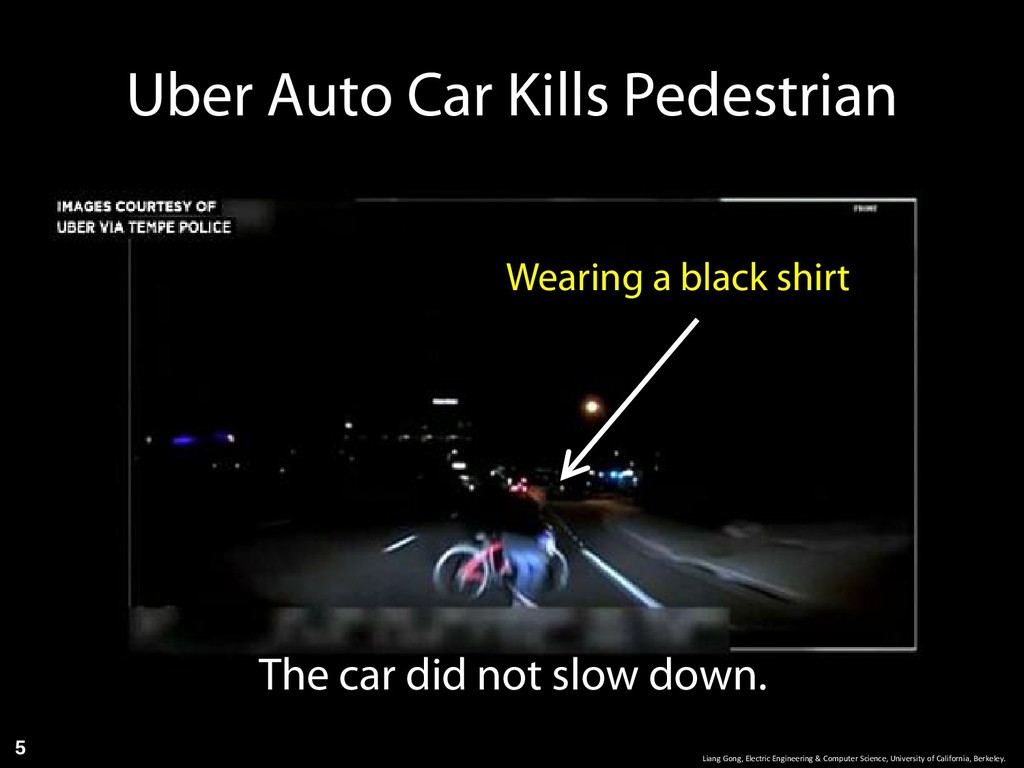
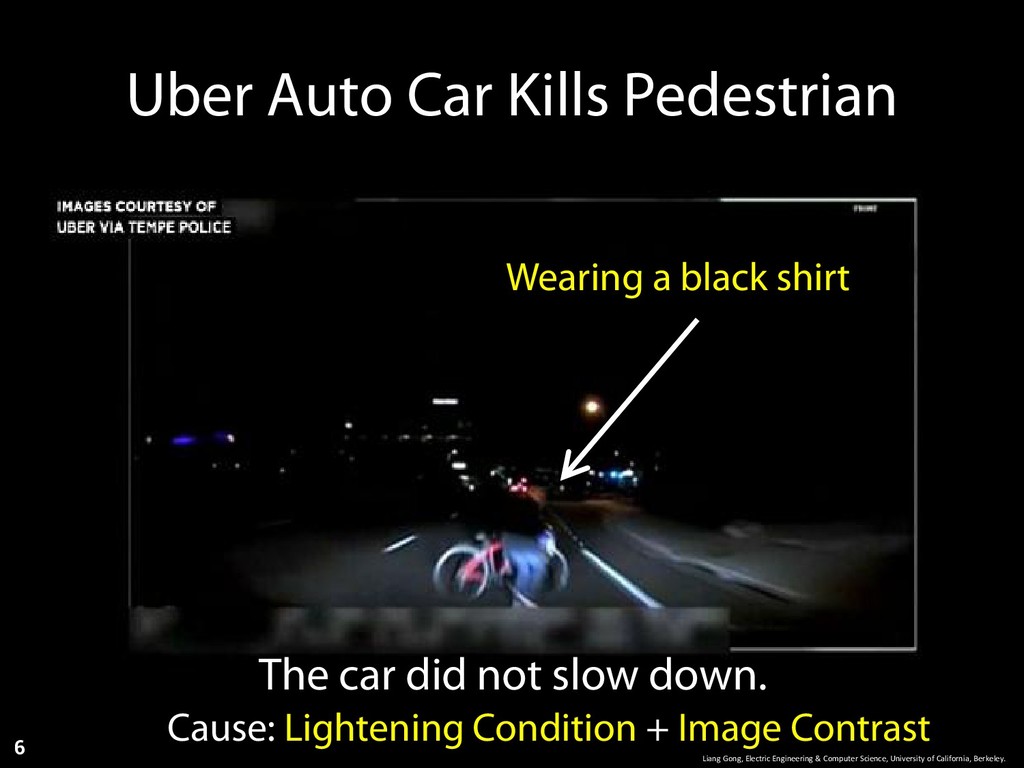
car did not slow down. Liang Gong, Electric Engineering & Computer Science, University of California, Berkeley. 6 Cause: Lightening Condition + Image Contrast
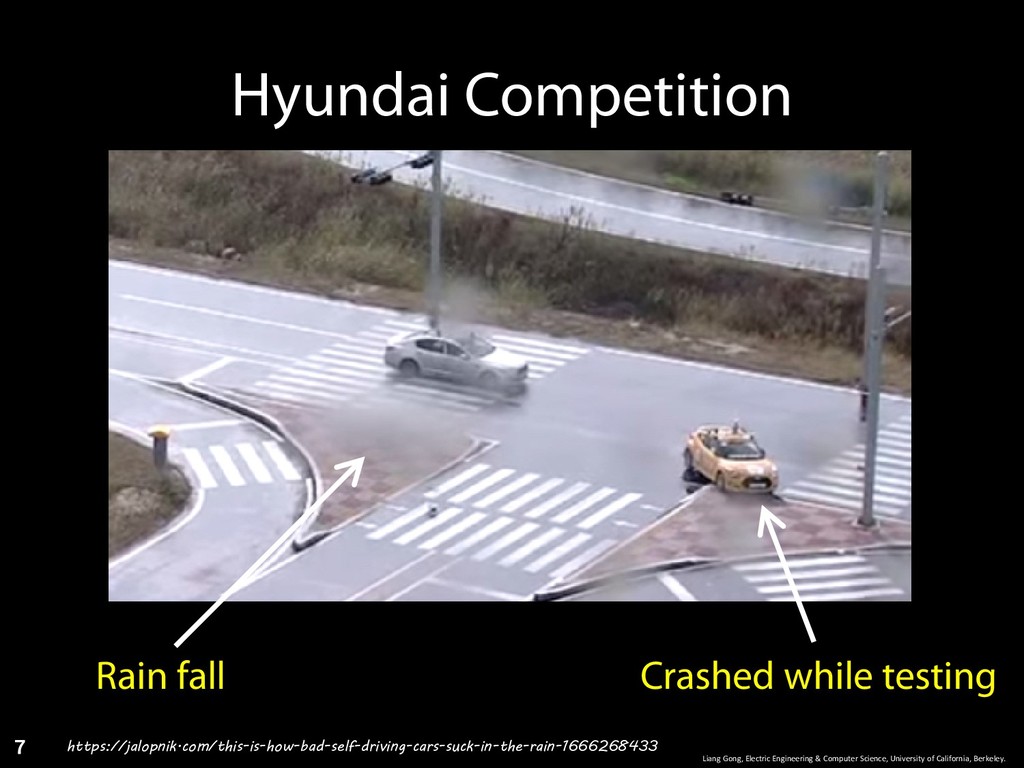
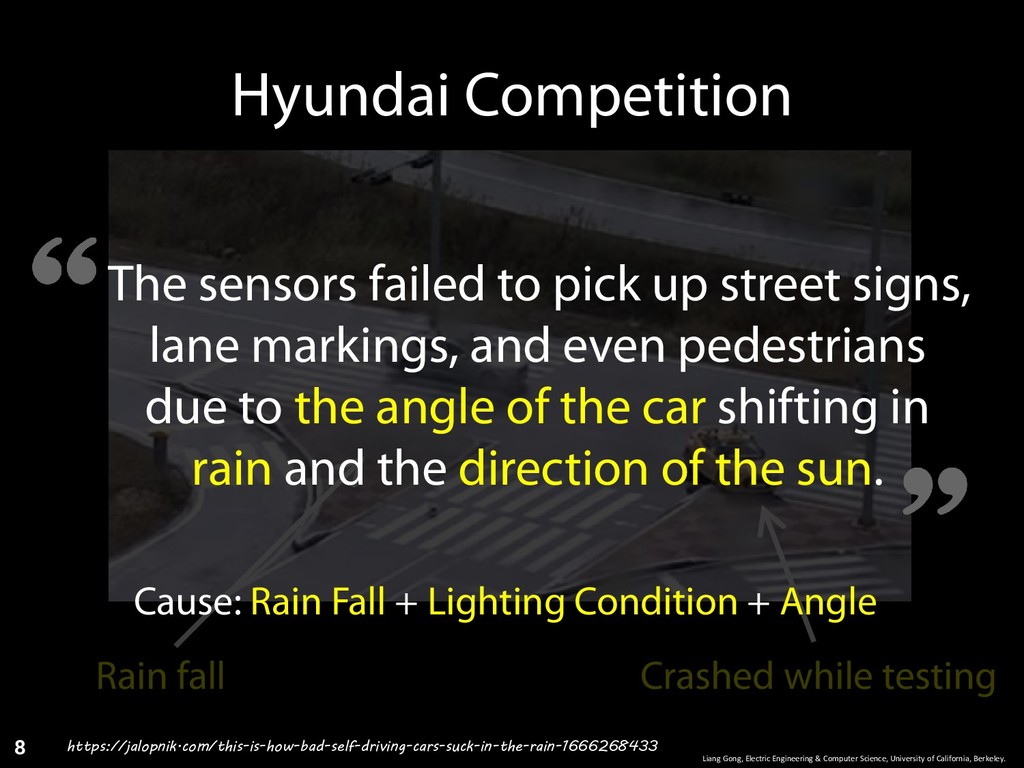
University of California, Berkeley. 8 Hyundai Competition Crashed while testing The sensors failed to pick up street signs, lane markings, and even pedestrians due to the angle of the car shifting in rain and the direction of the sun. Cause: Rain Fall + Lighting Condition + Angle
California, Berkeley. 9 Tesla Autopilot Mode Kills the Driver The camera failed to recognize the white truck against a bright sky. … was killed when his Tesla Model S, which was operating in Autopilot mode, crashed into a tractor-trailer. Krista Kitchen, via Associated Press Cause: Image Contrast
Berkeley. 10 Google Self-driving Car Accident Hit a bus while shifting lane. https://www.wired.com/2016/02/googles-self-driving-car-may-caused-first-crash/
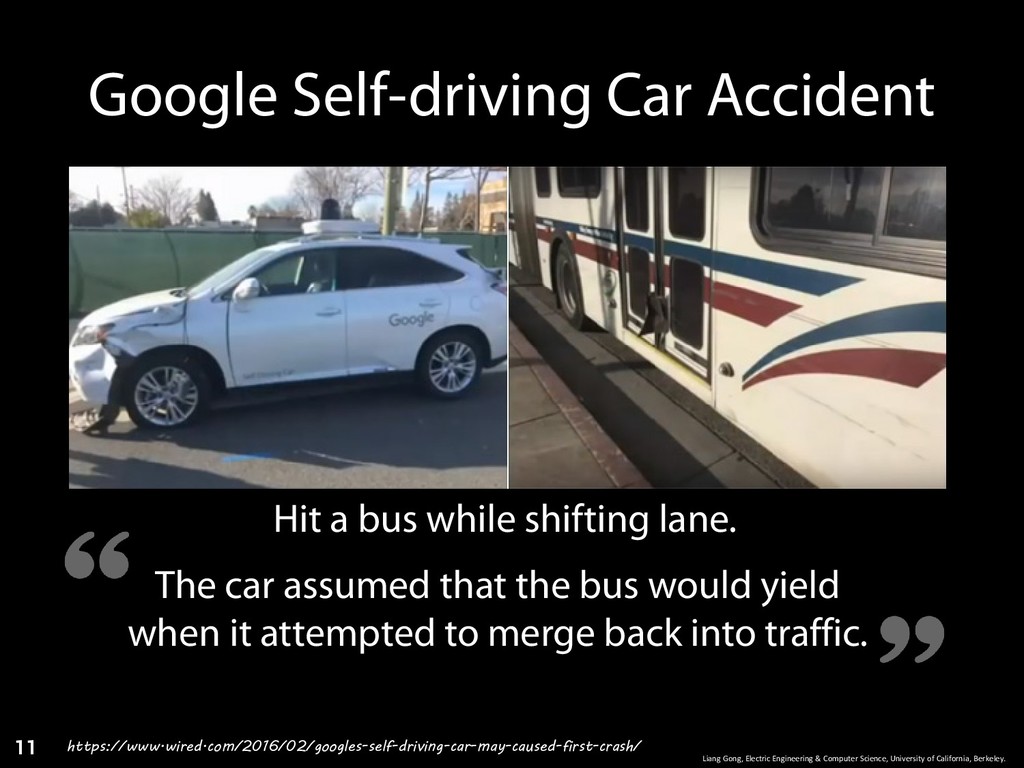
Berkeley. 11 Google Self-driving Car Accident Hit a bus while shifting lane. The car assumed that the bus would yield when it attempted to merge back into traffic. https://www.wired.com/2016/02/googles-self-driving-car-may-caused-first-crash/
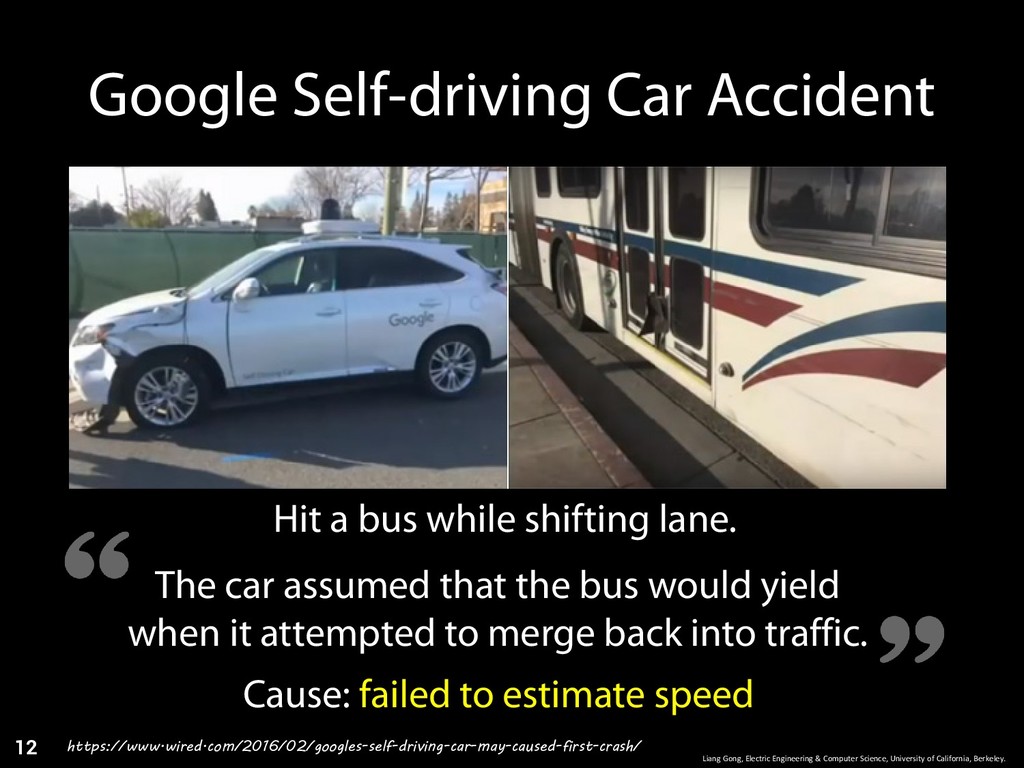
California, Berkeley. 12 Google Self-driving Car Accident Hit a bus while shifting lane. The car assumed that the bus would yield when it attempted to merge back into traffic. Cause: failed to estimate speed
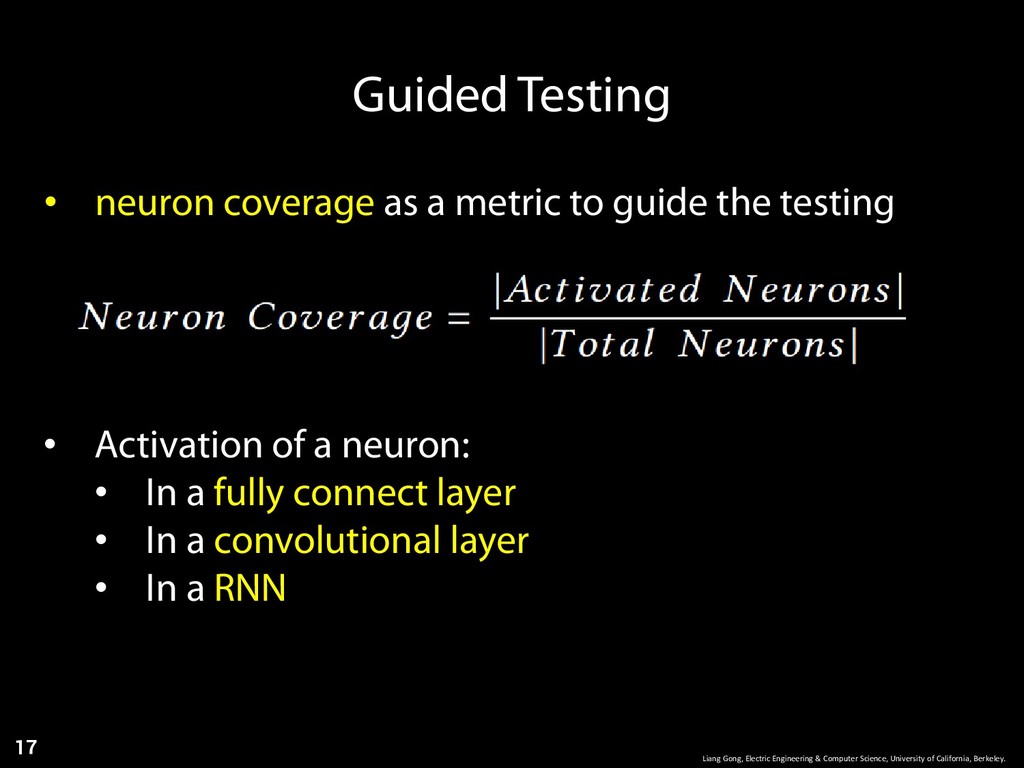
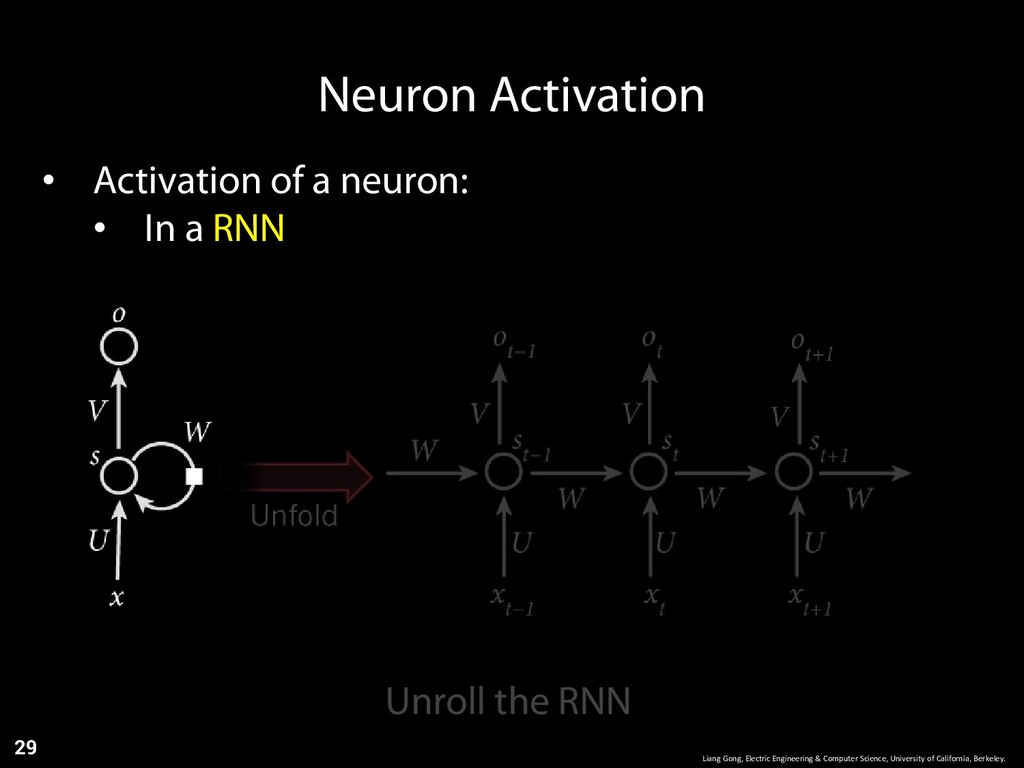
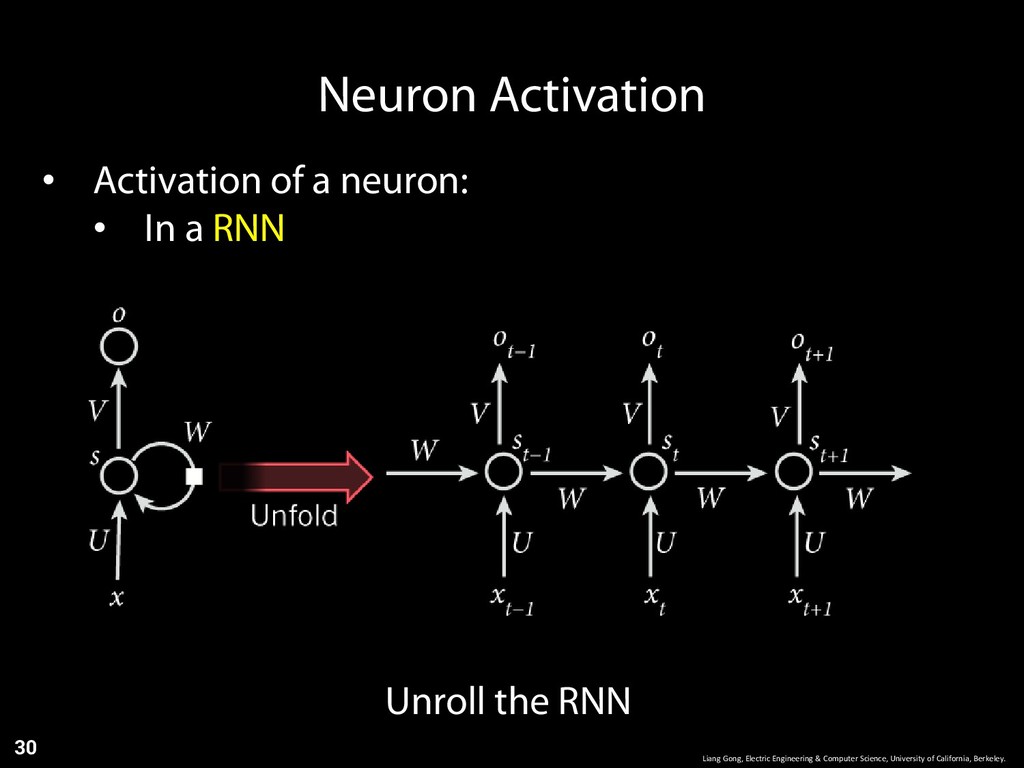
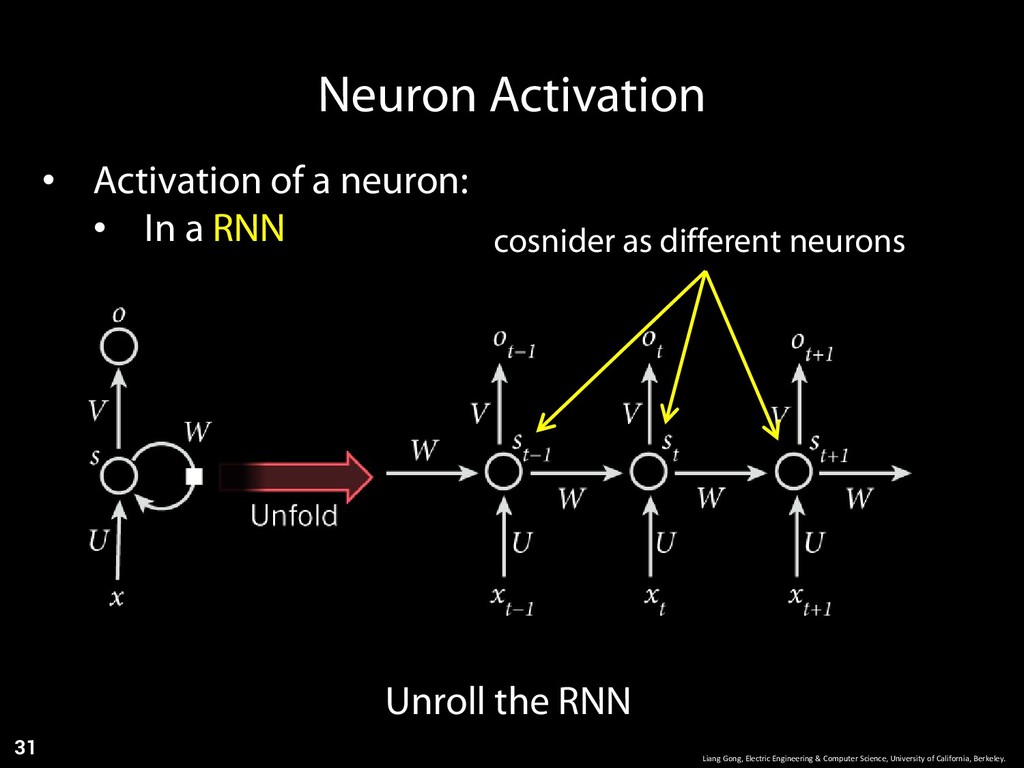
of California, Berkeley. 17 • neuron coverage as a metric to guide the testing • Activation of a neuron: • In a fully connect layer • In a convolutional layer • In a RNN
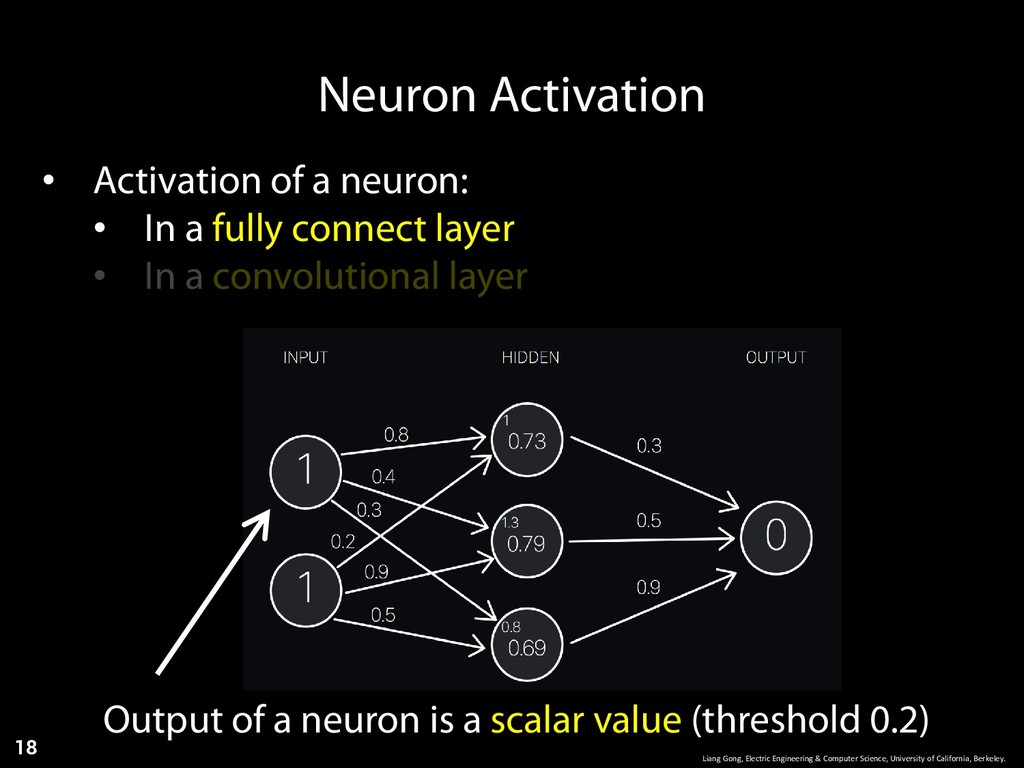
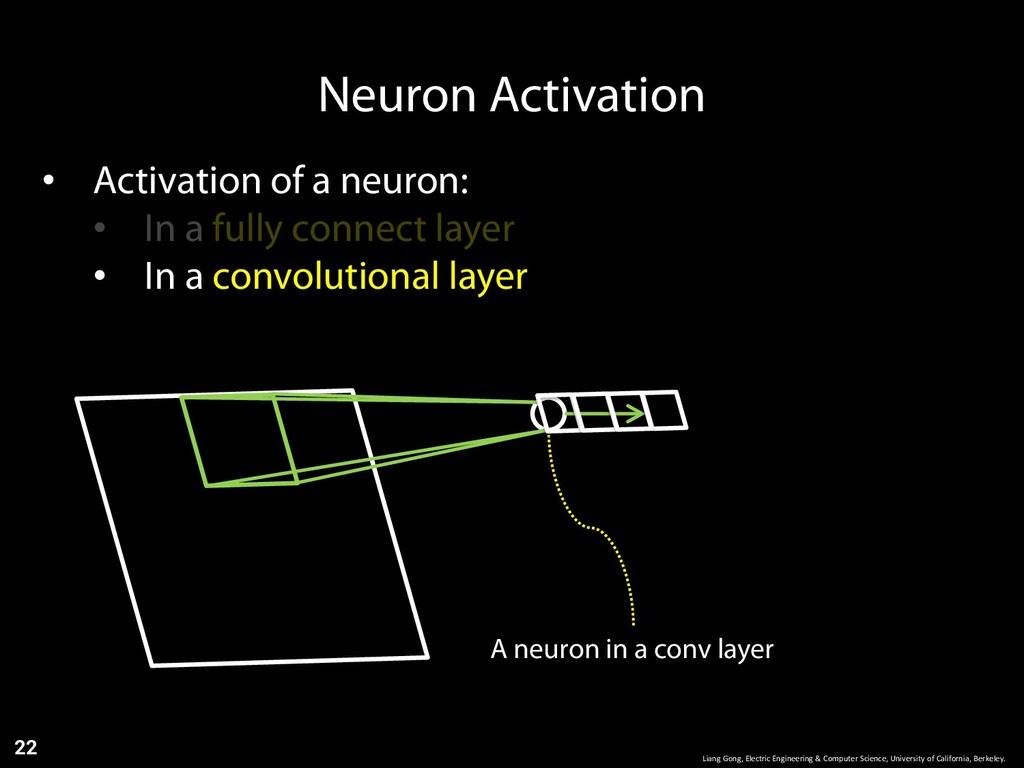
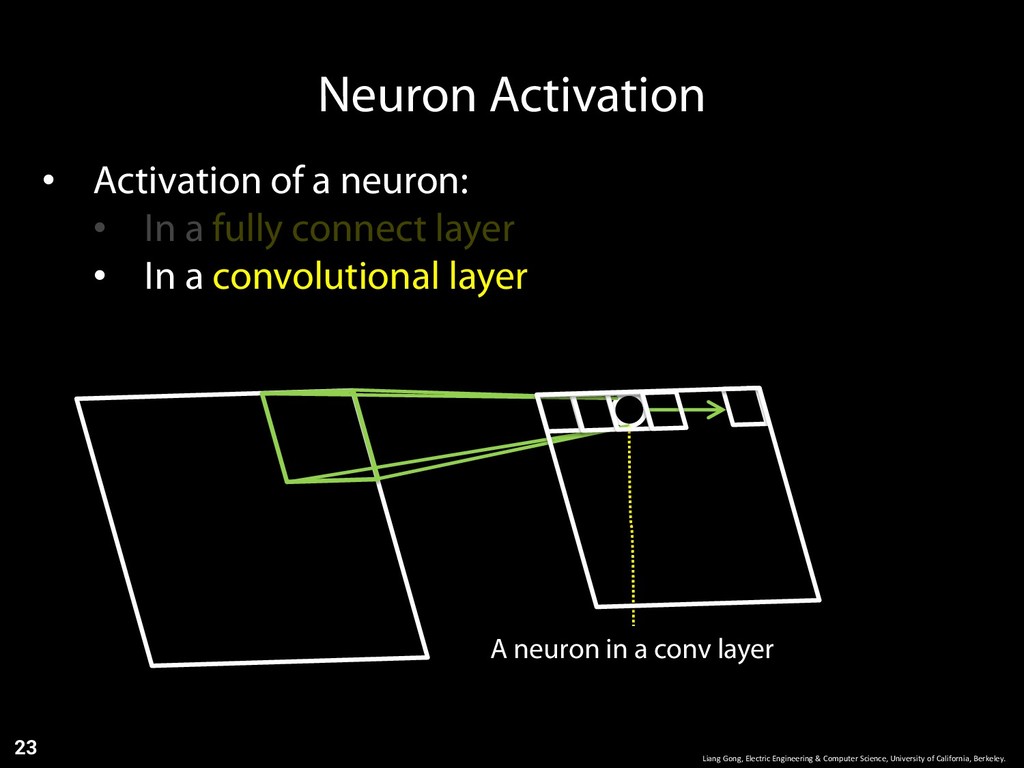
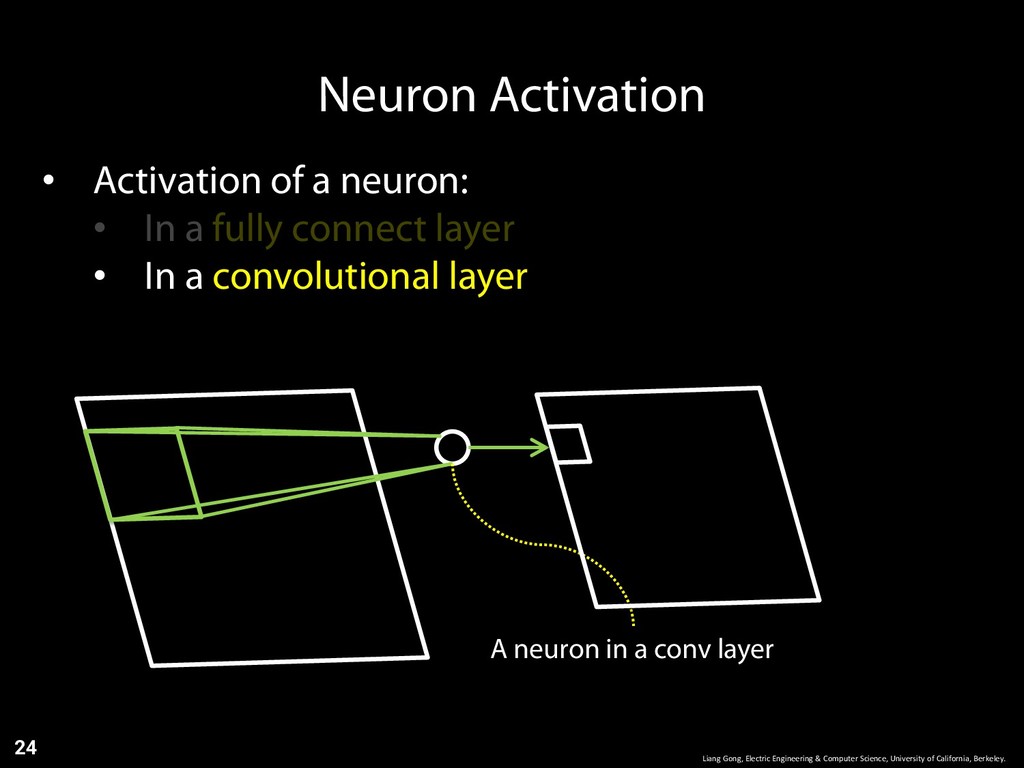
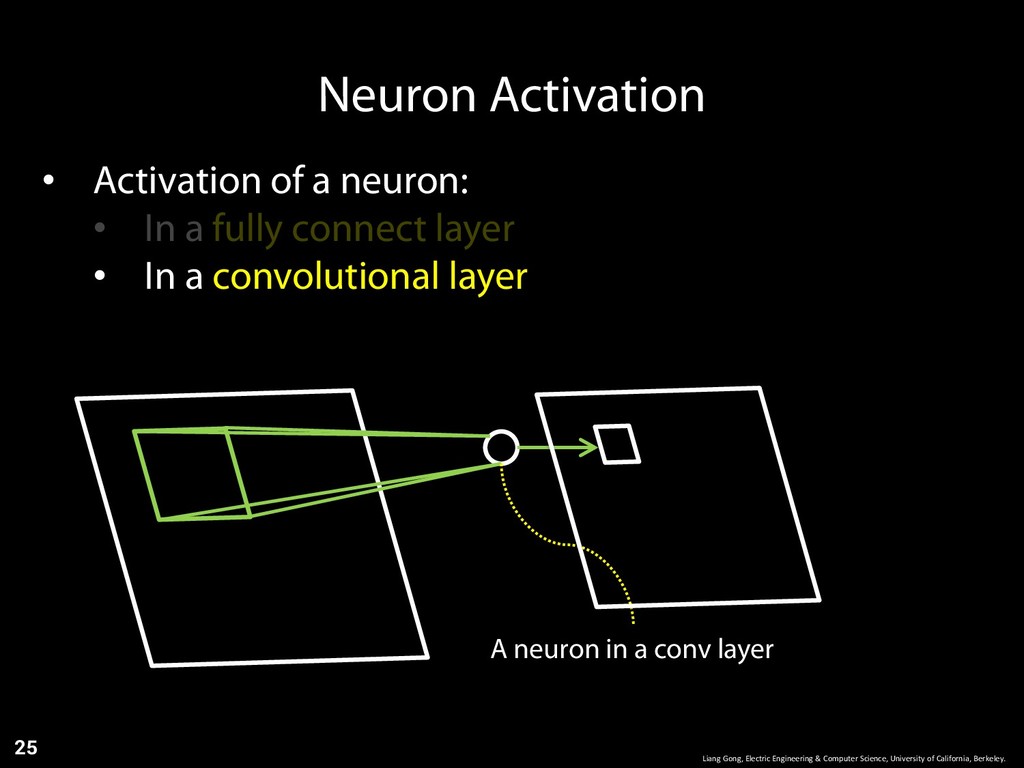
Berkeley. 18 • Activation of a neuron: • In a fully connect layer • In a convolutional layer Output of a neuron is a scalar value (threshold 0.2) Neuron Activation
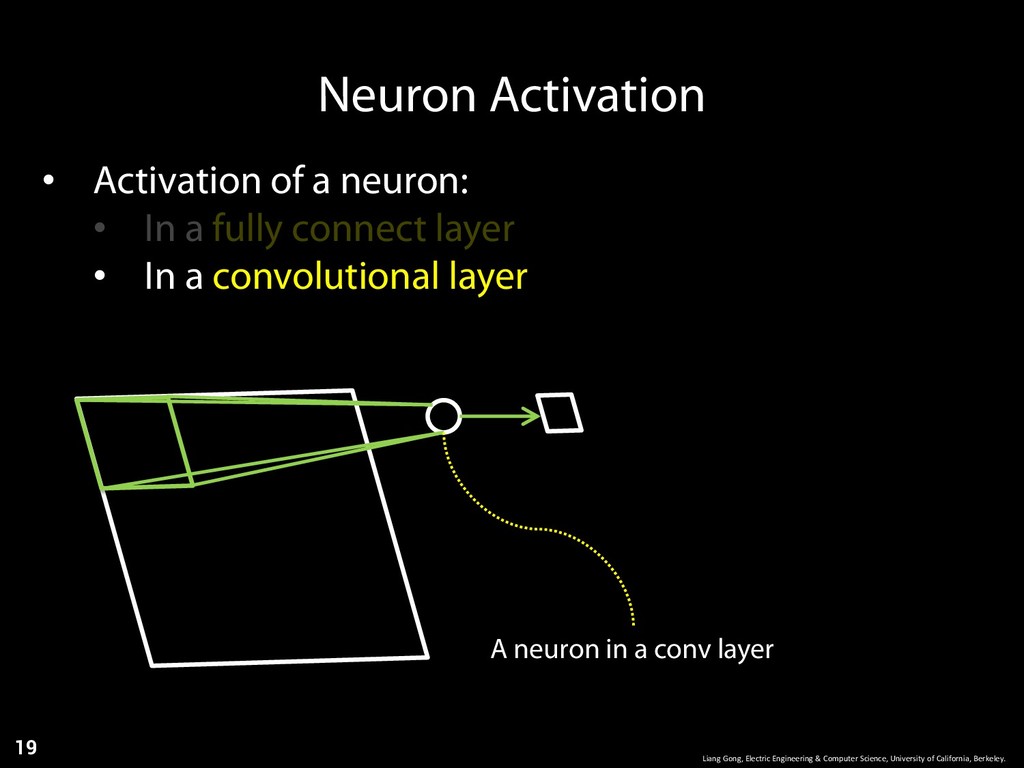
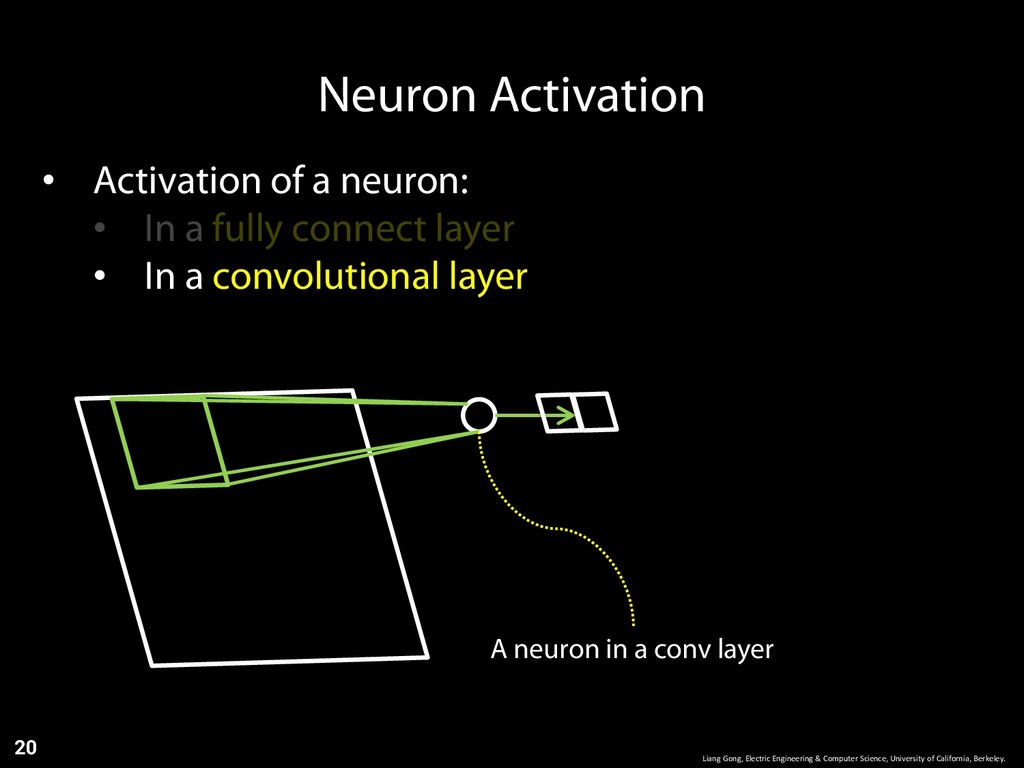
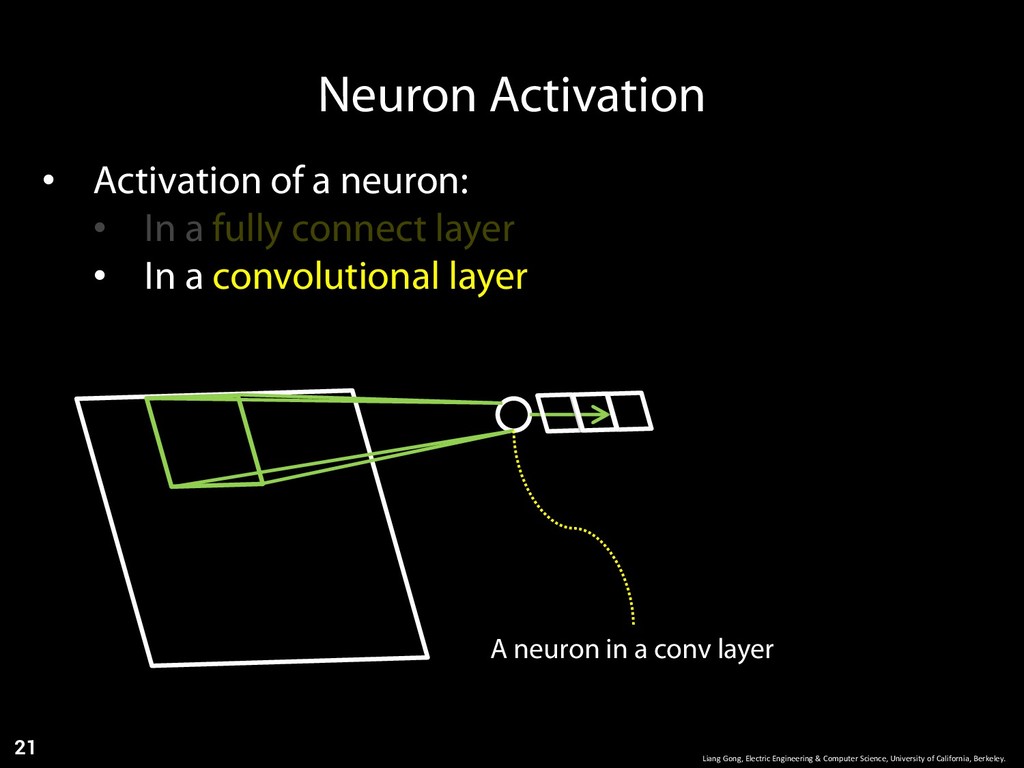
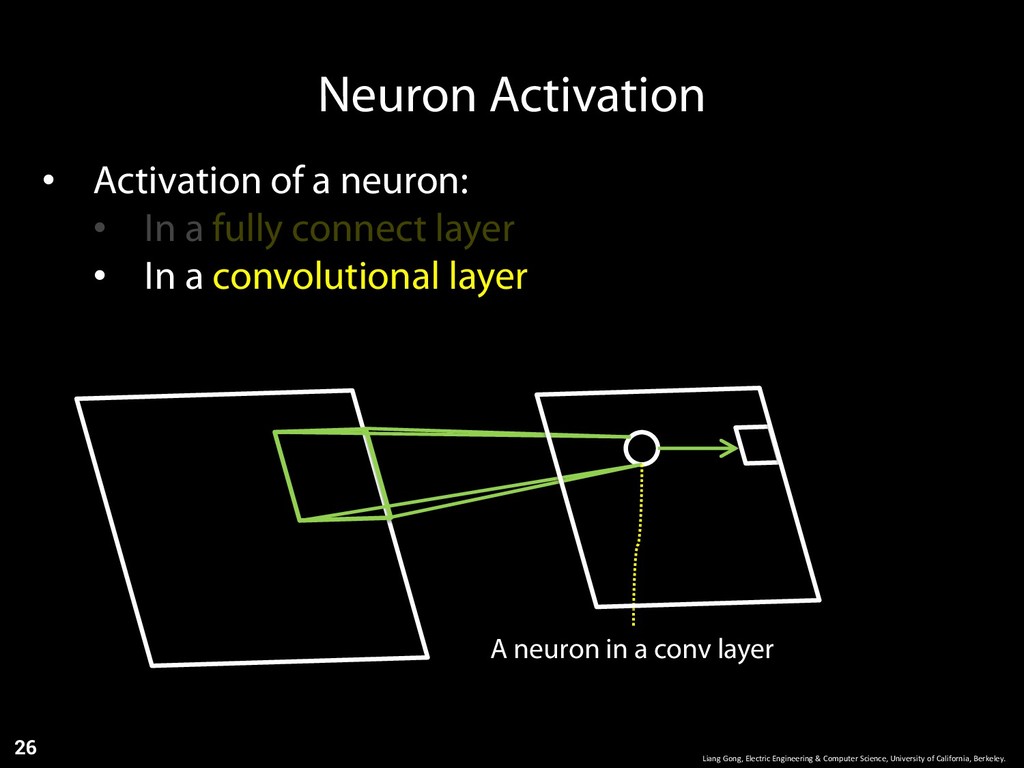
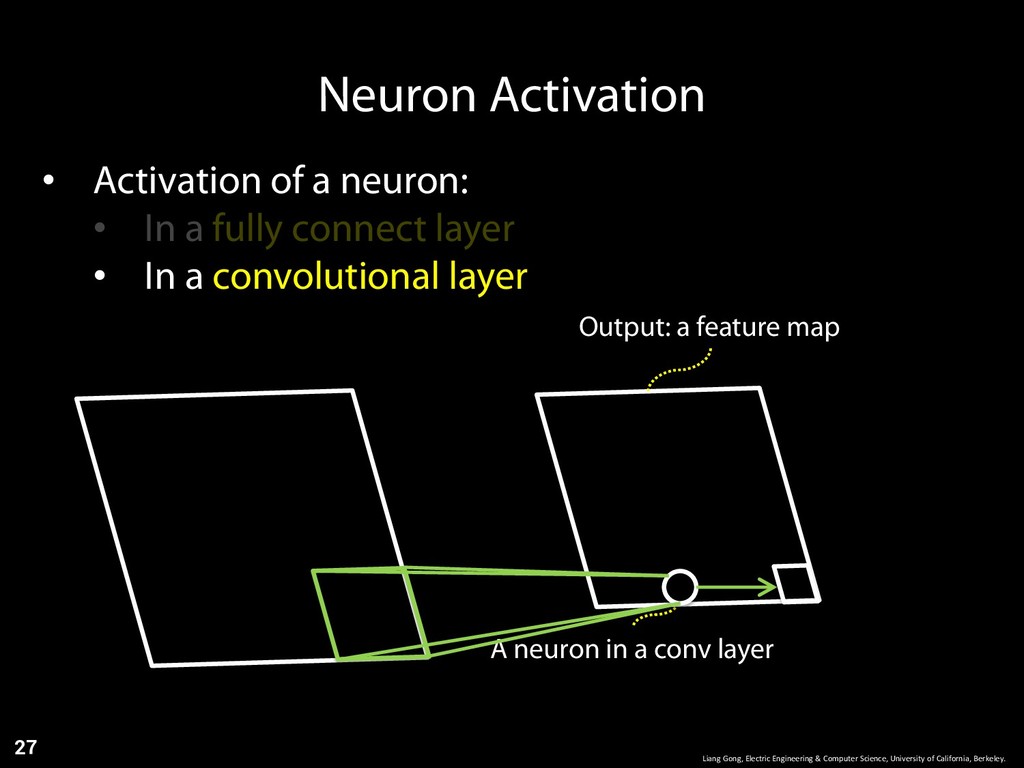
of California, Berkeley. 27 • Activation of a neuron: • In a fully connect layer • In a convolutional layer A neuron in a conv layer Output: a feature map
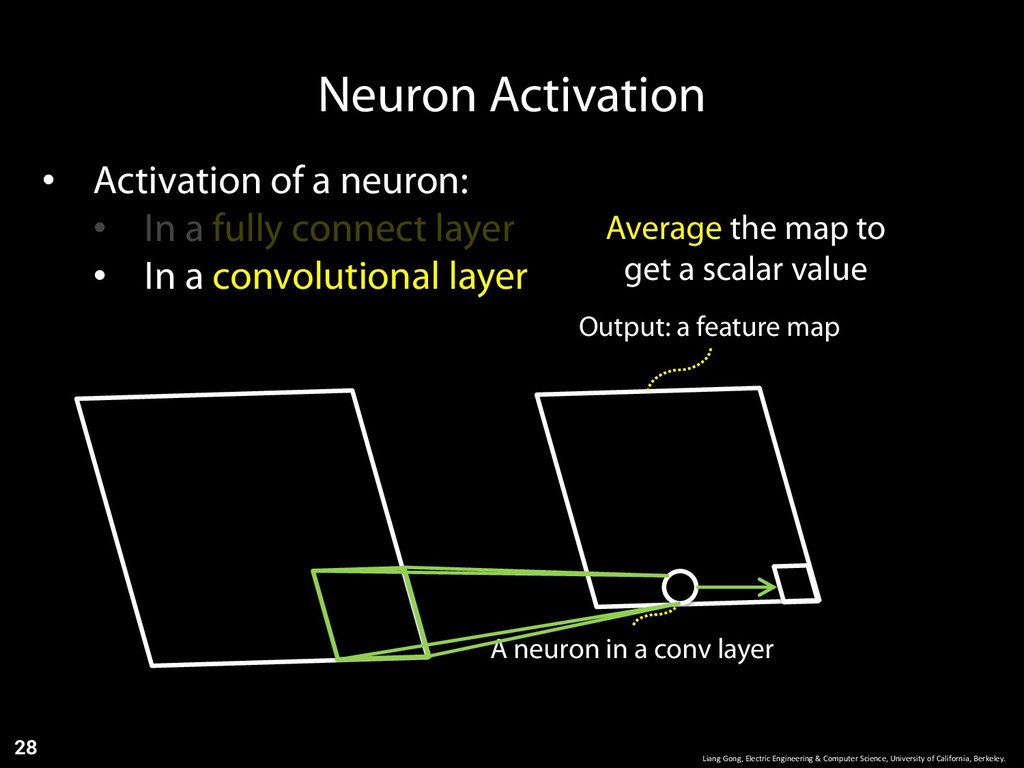
of California, Berkeley. 28 • Activation of a neuron: • In a fully connect layer • In a convolutional layer Output: a feature map Average the map to get a scalar value A neuron in a conv layer
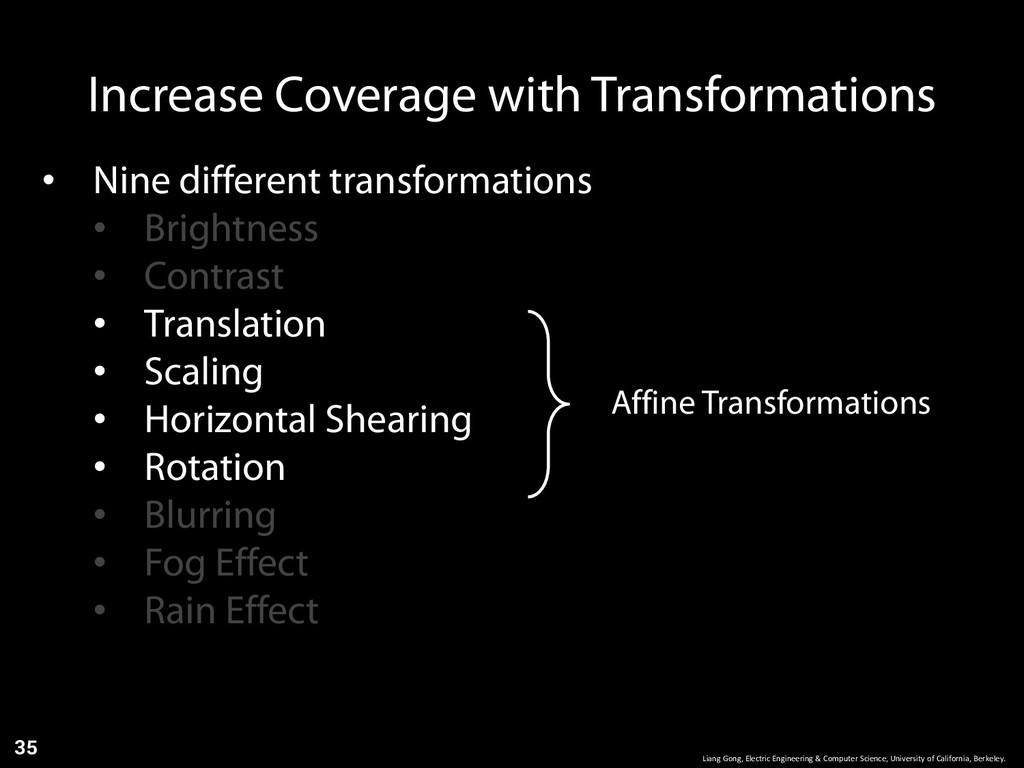
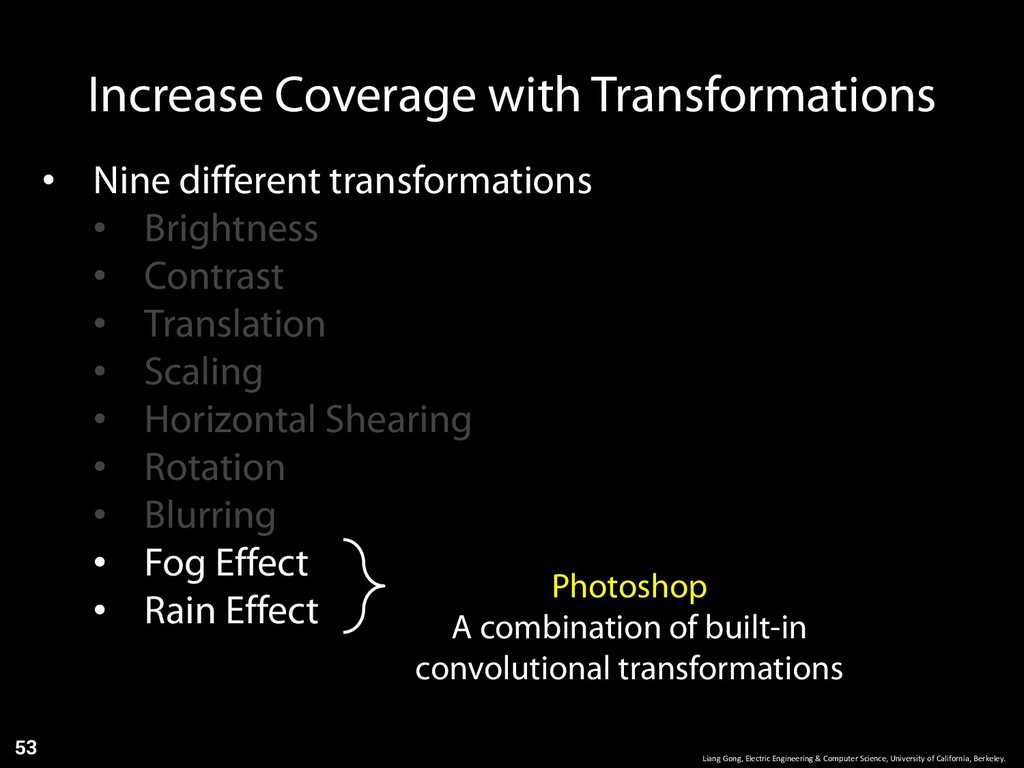
Science, University of California, Berkeley. 34 • Transformation of Brightness • For each pixel +/- a constant value • Transformation of Contrast • For each pixel * a constant value
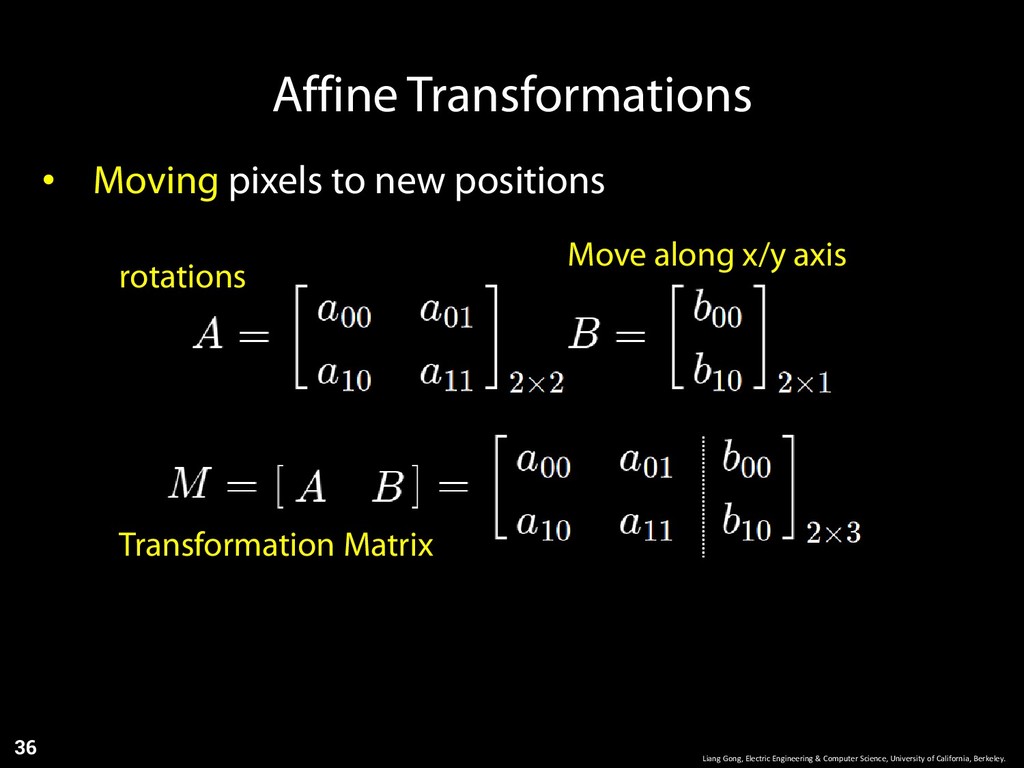
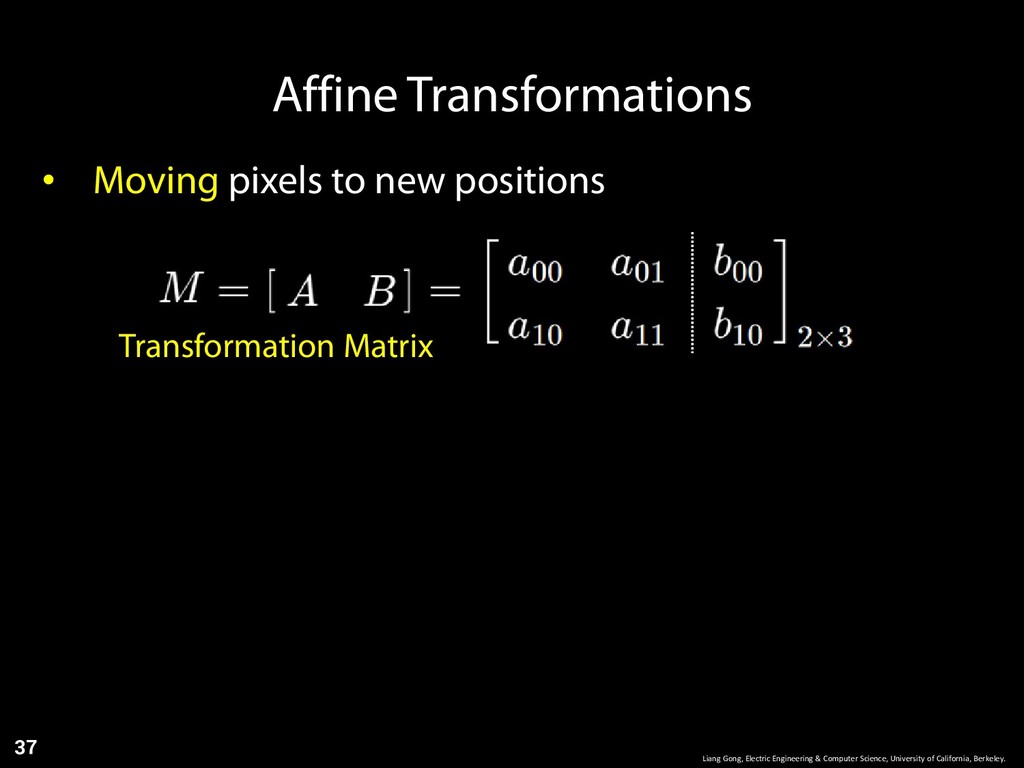
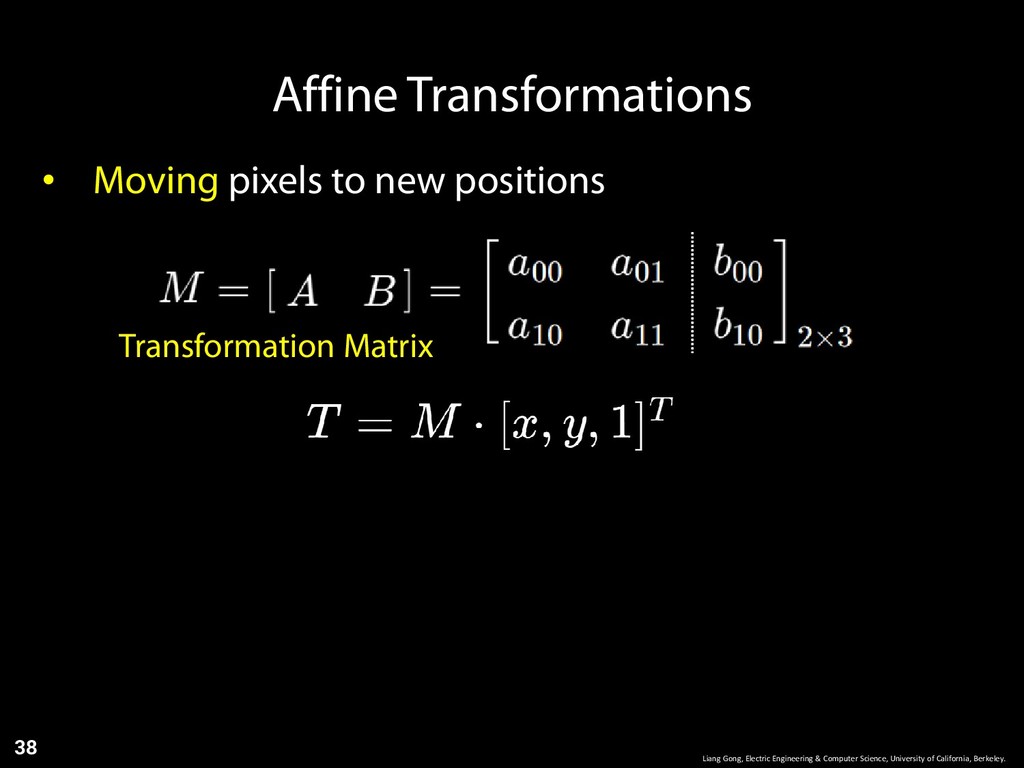
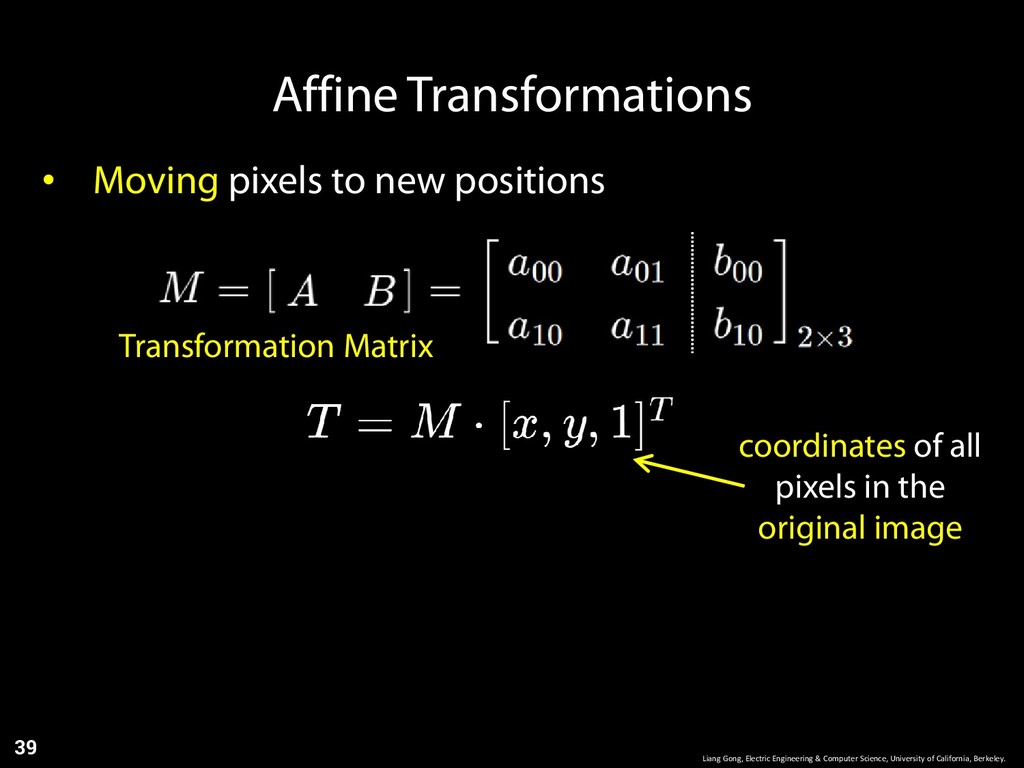
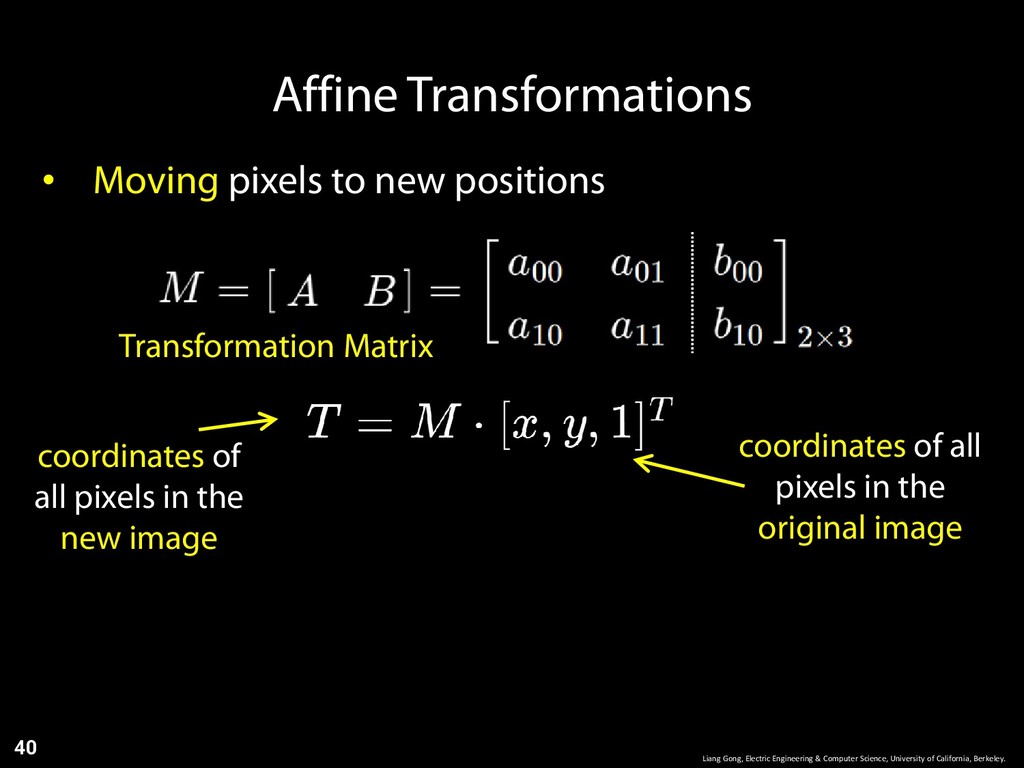
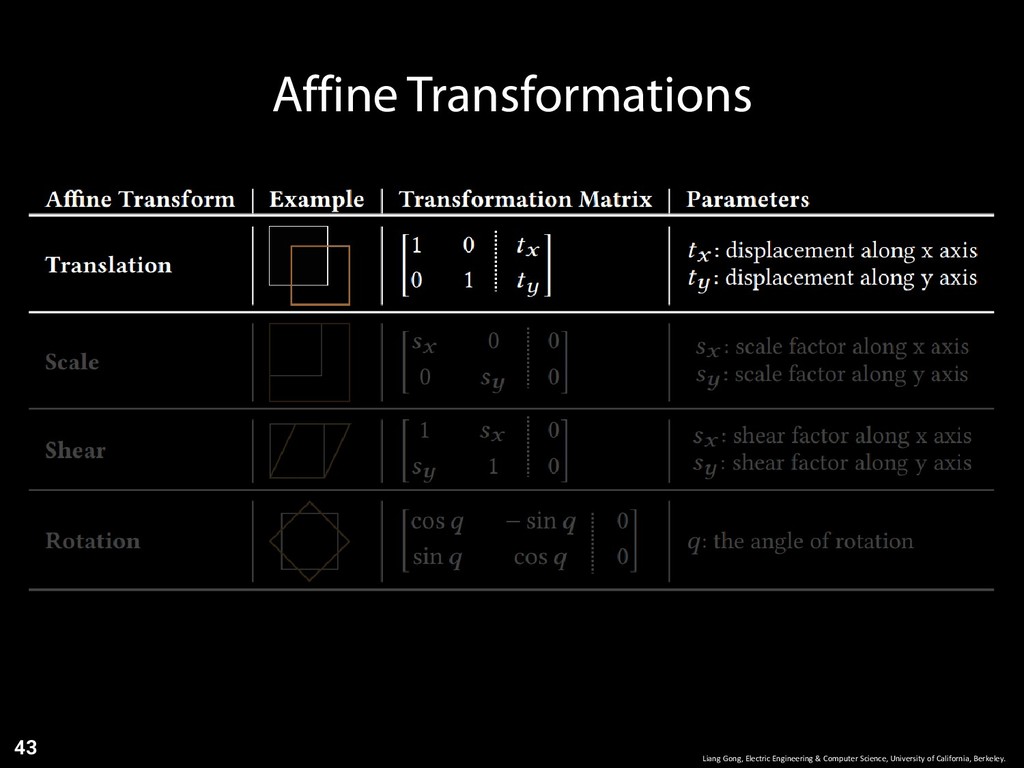
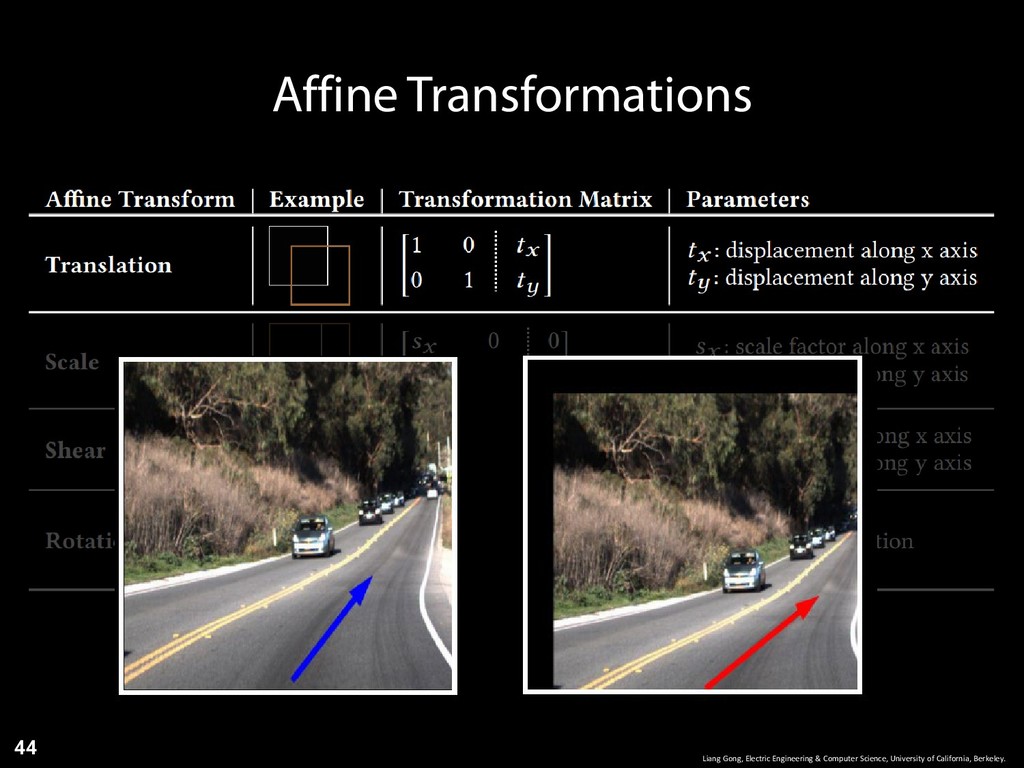
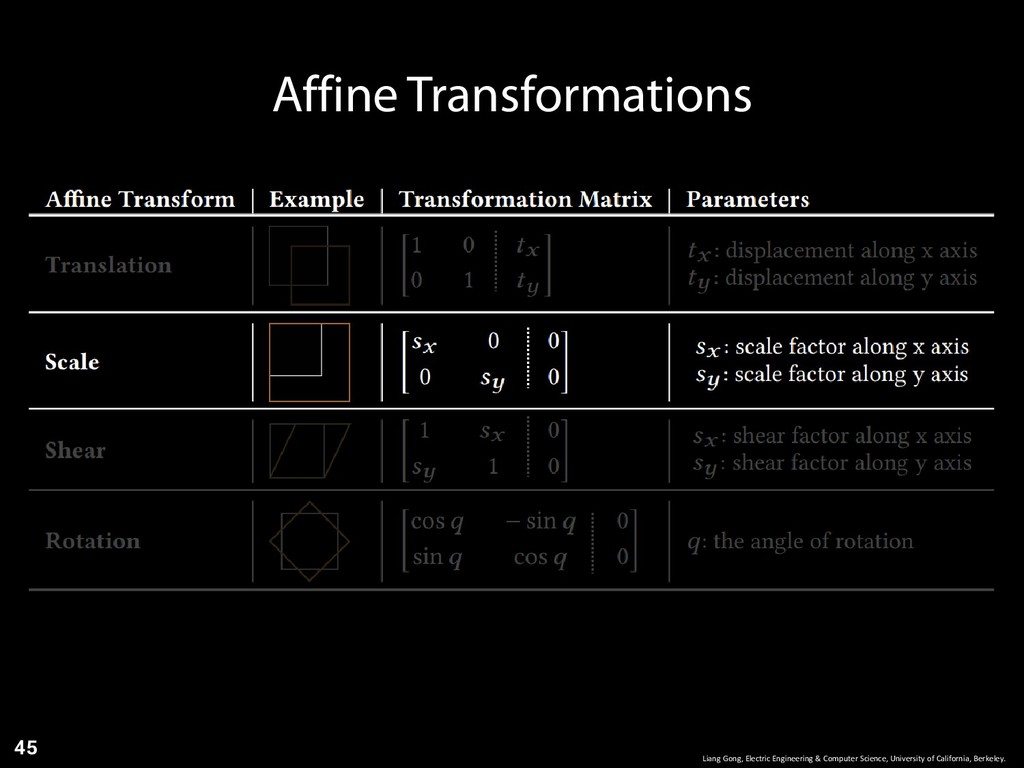
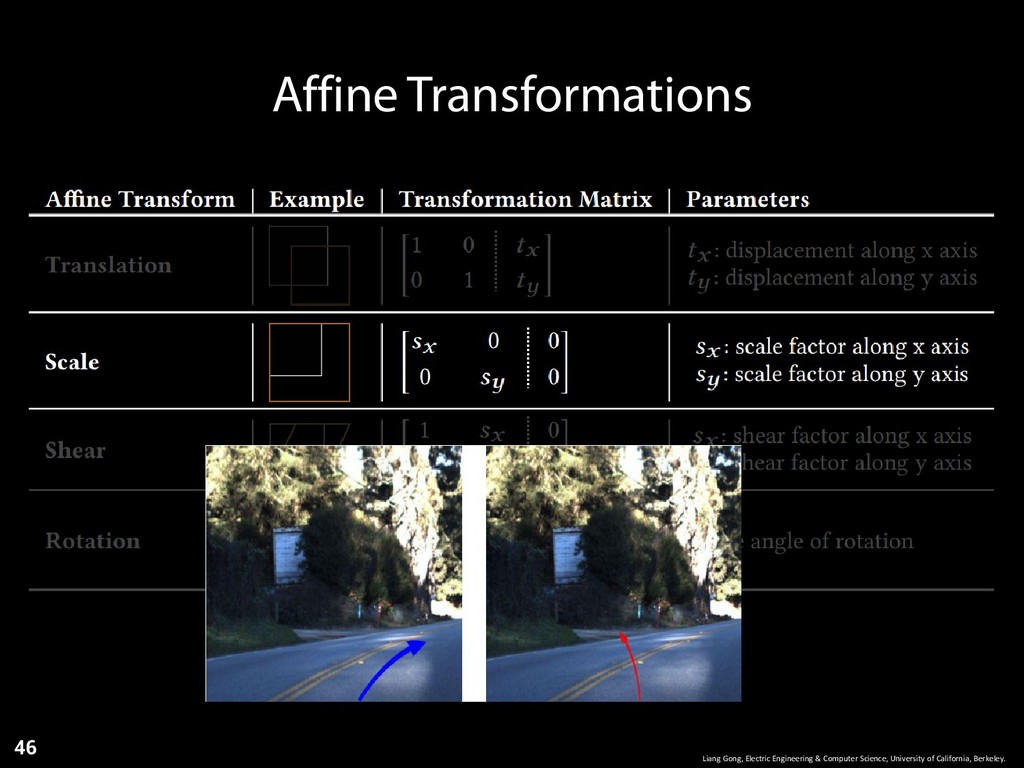
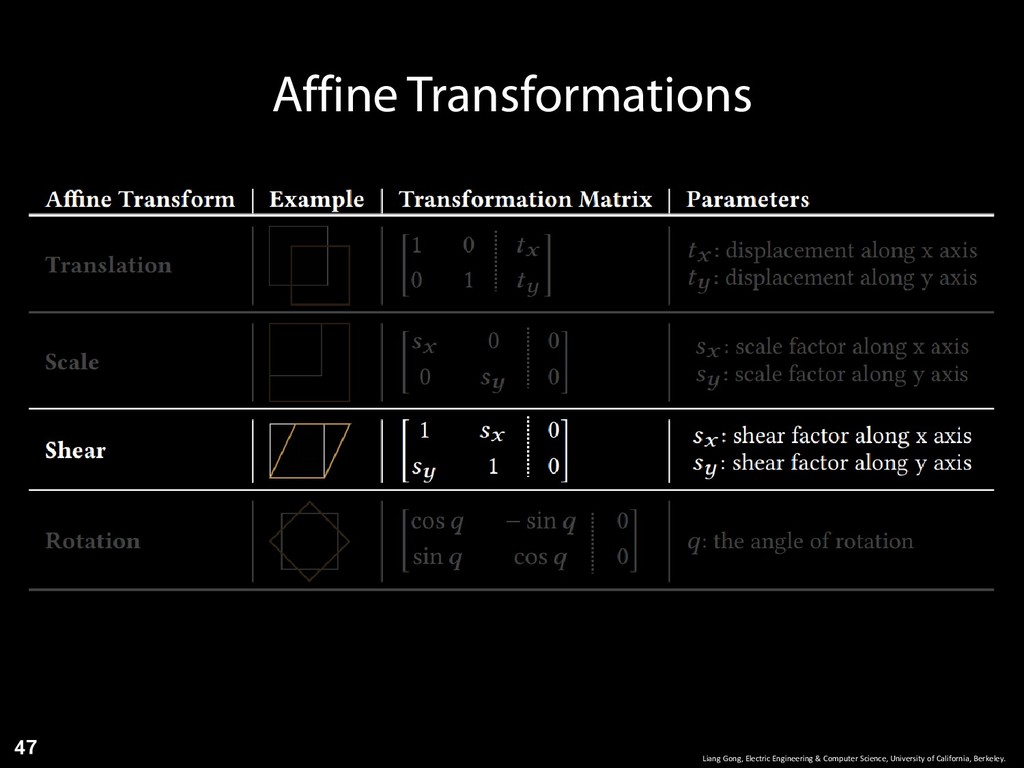
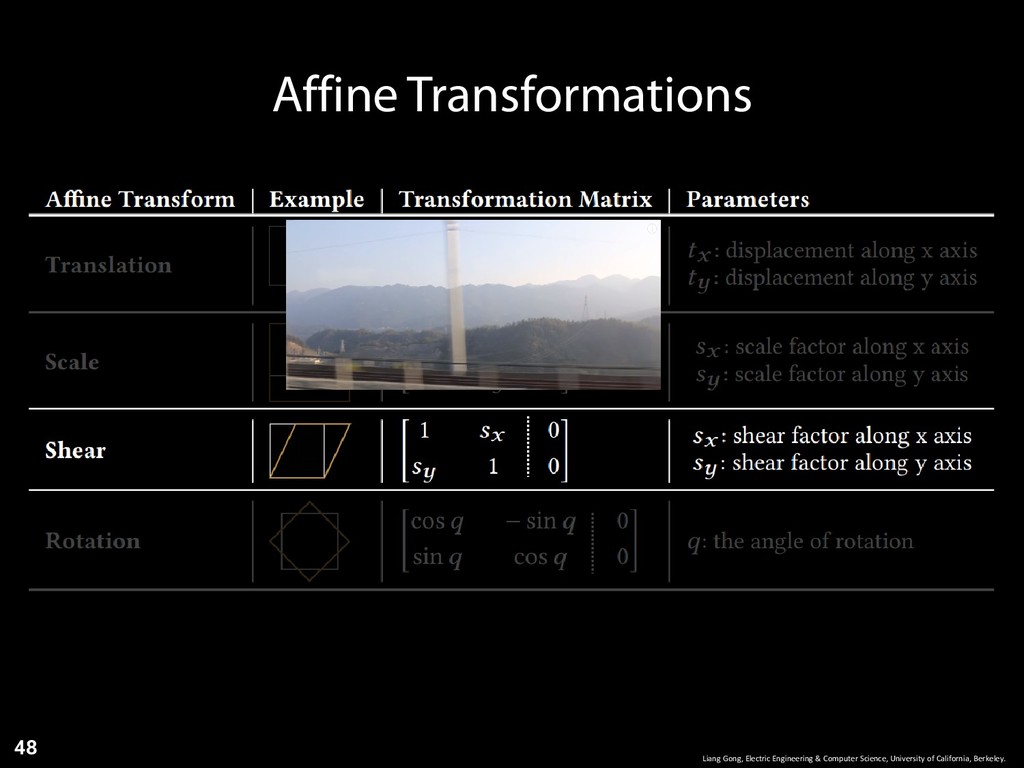
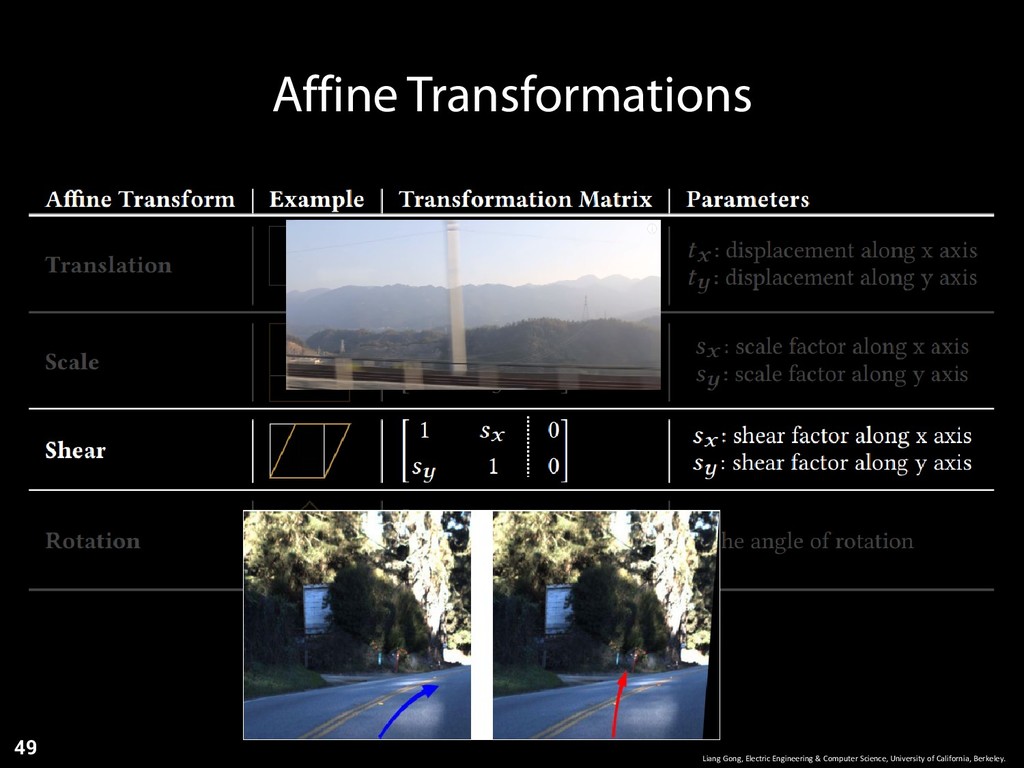
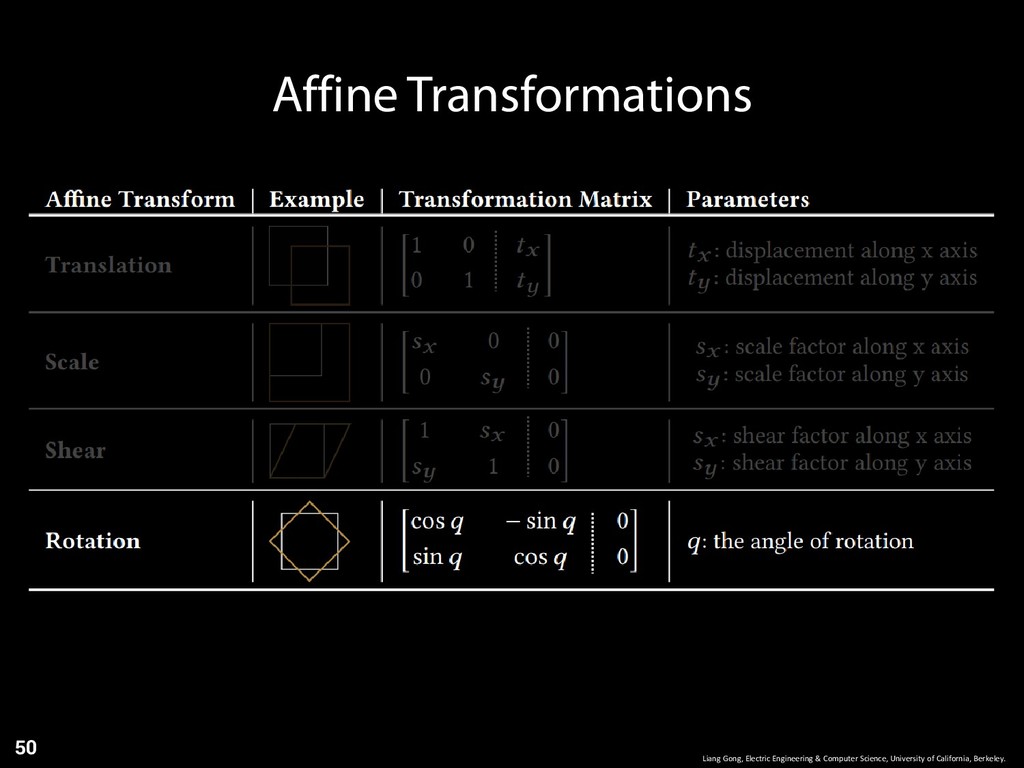
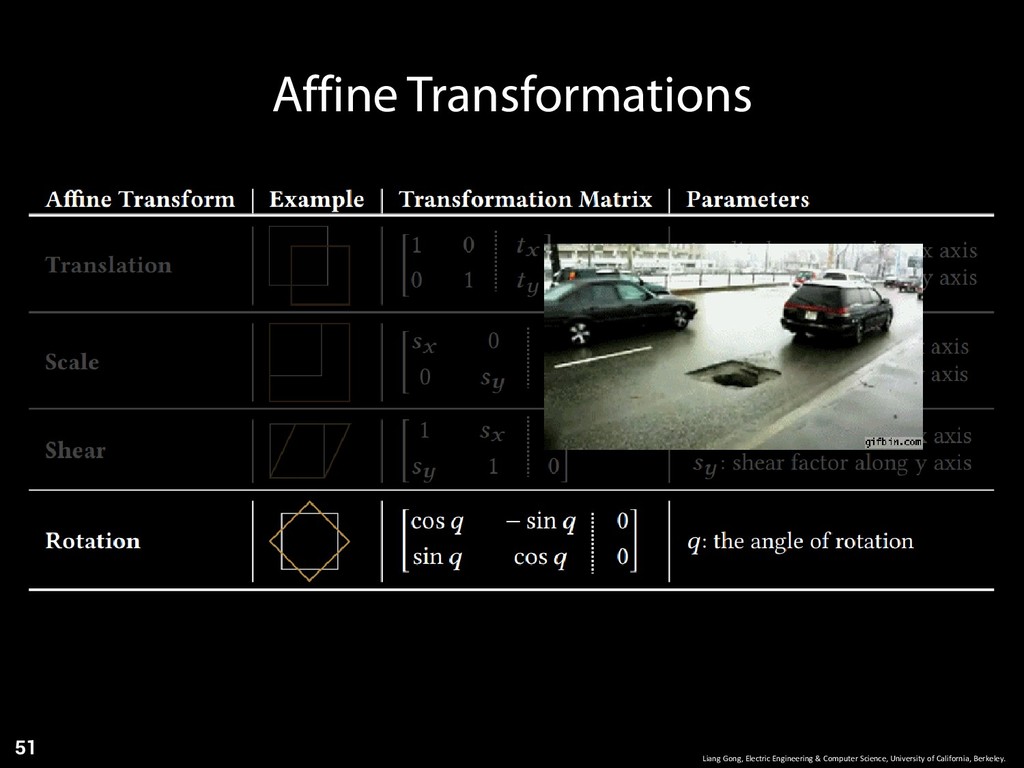
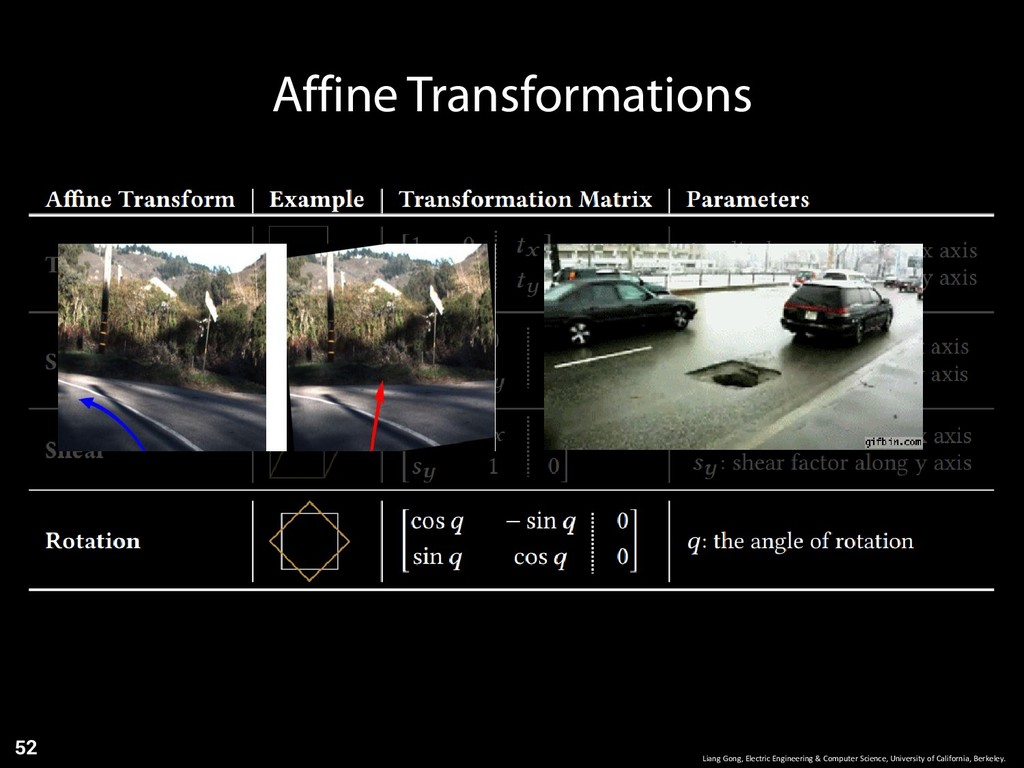
of California, Berkeley. 40 • Moving pixels to new positions coordinates of all pixels in the original image Transformation Matrix coordinates of all pixels in the new image
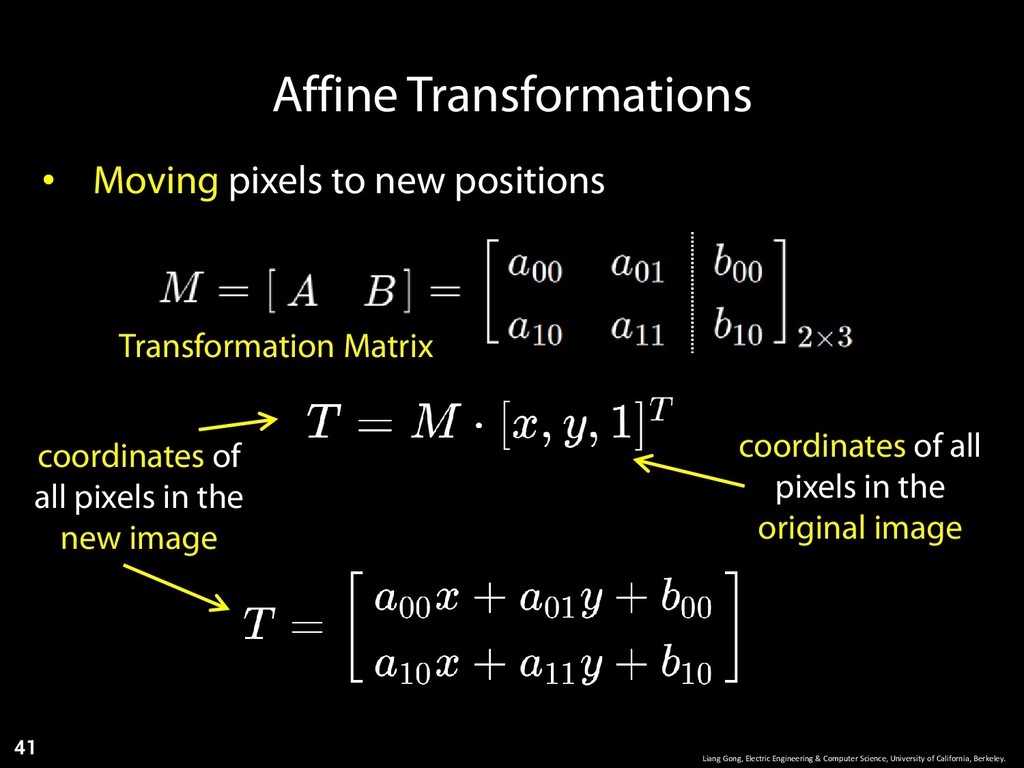
of California, Berkeley. 41 • Moving pixels to new positions coordinates of all pixels in the original image Transformation Matrix coordinates of all pixels in the new image
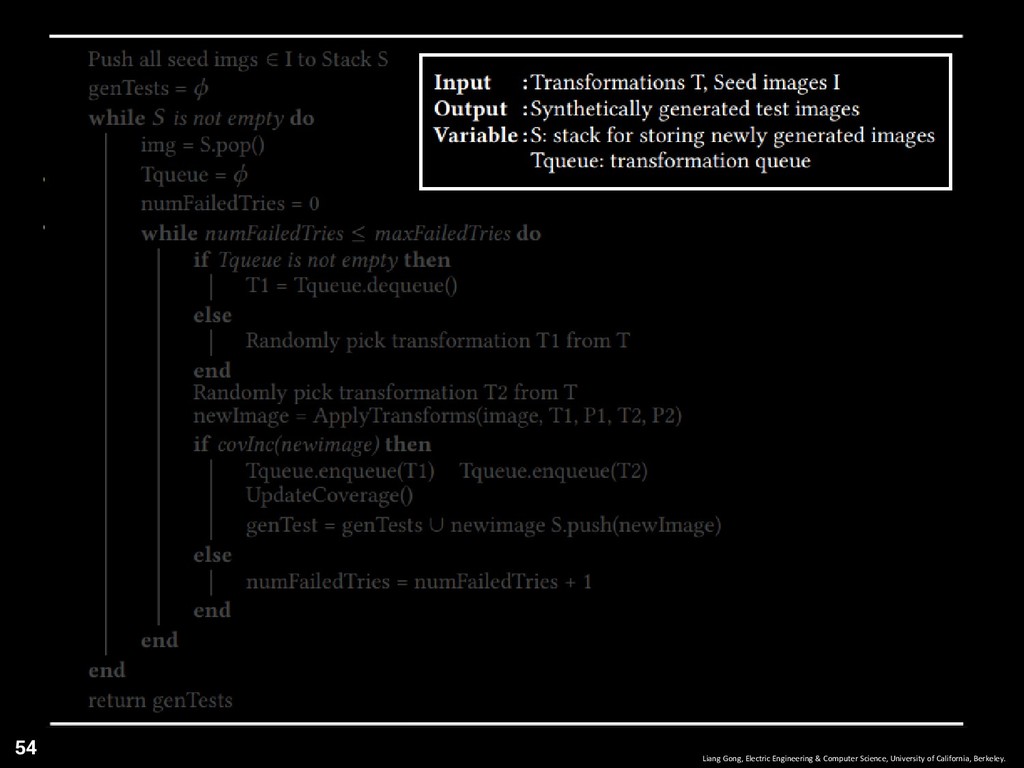
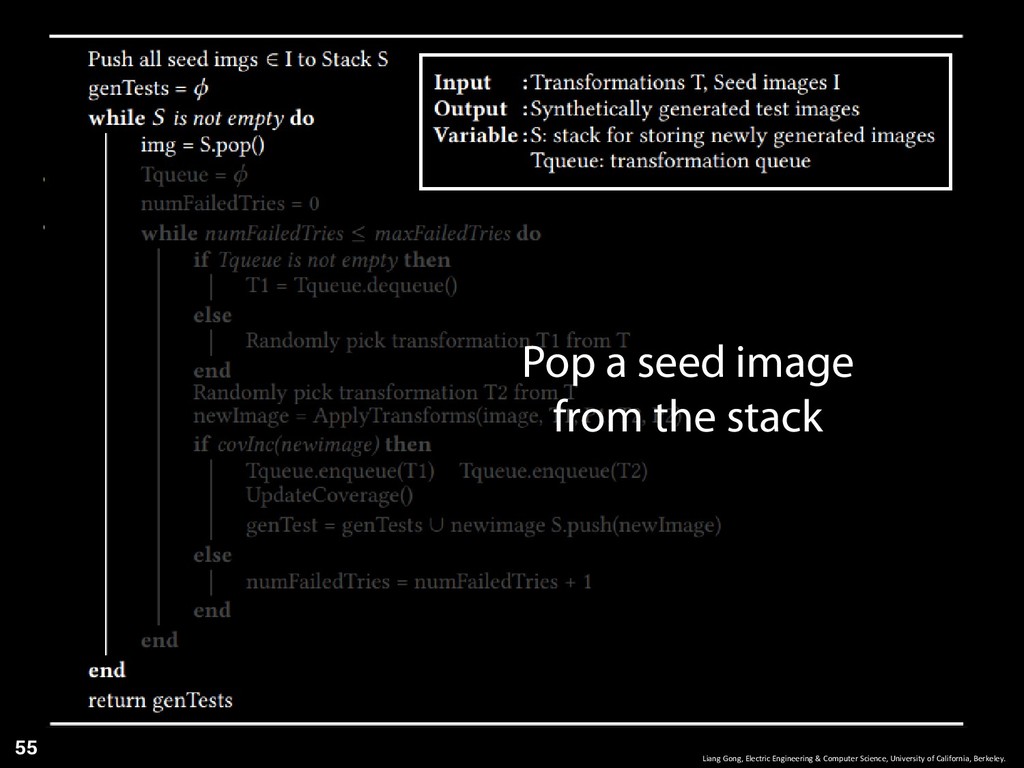
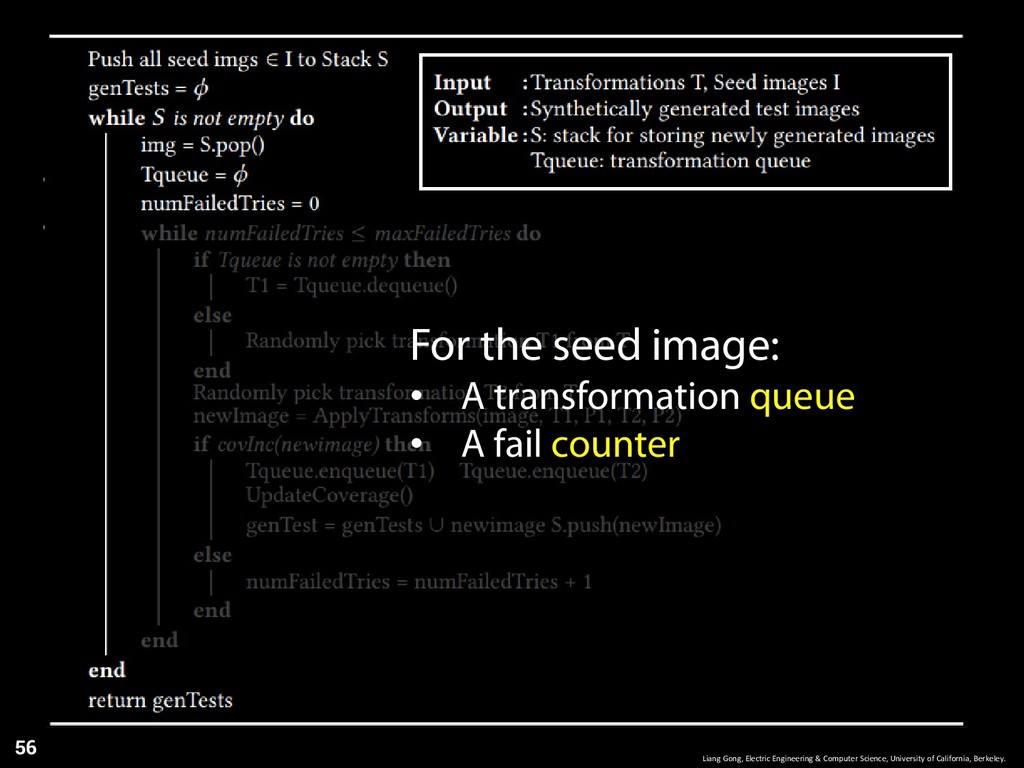
of California, Berkeley. 56 • Greedily combine transformations to images • Try to maximize the coverage For the seed image: • A transformation queue • A fail counter
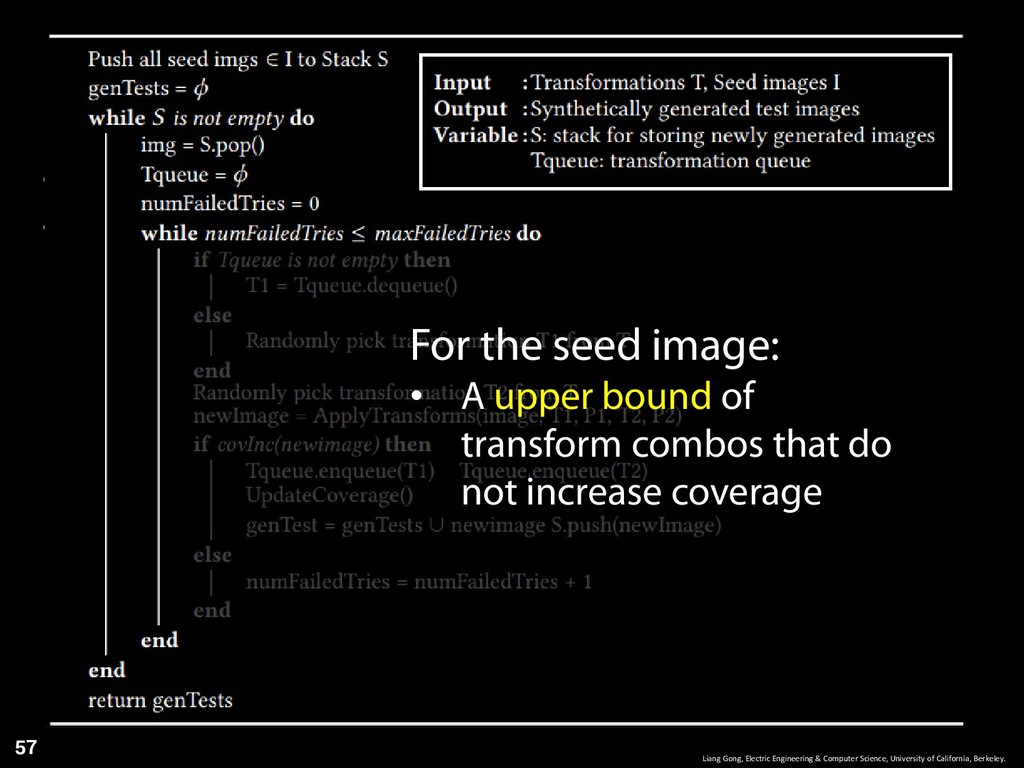
of California, Berkeley. 57 • Greedily combine transformations to images • Try to maximize the coverage For the seed image: • A upper bound of transform combos that do not increase coverage
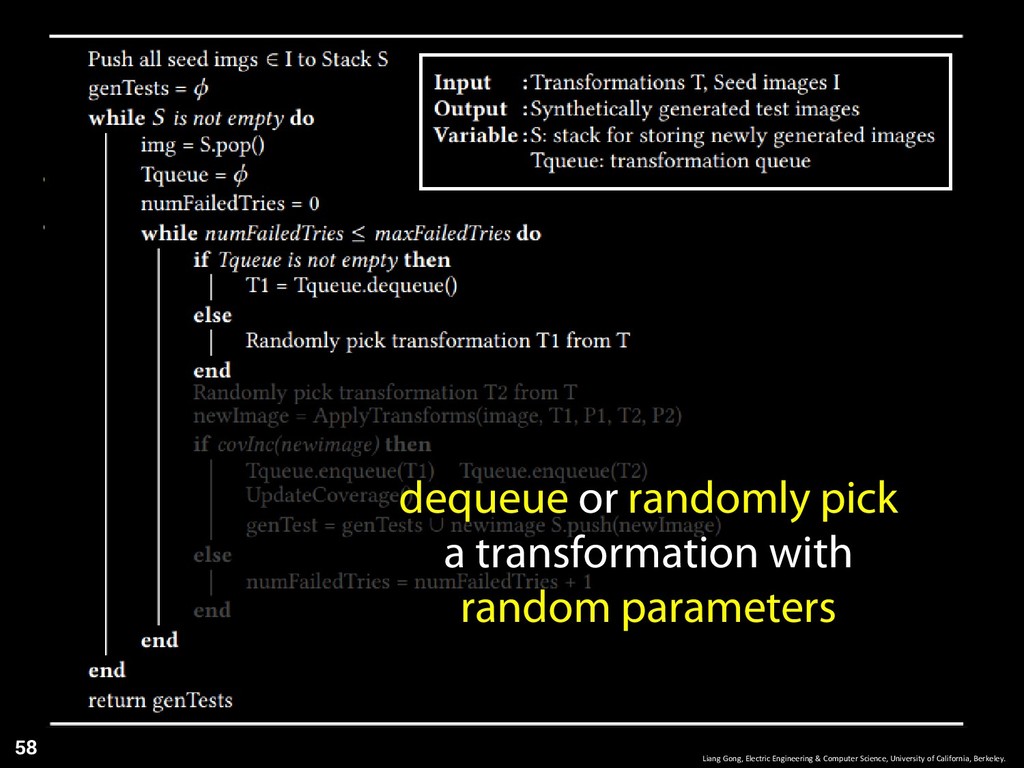
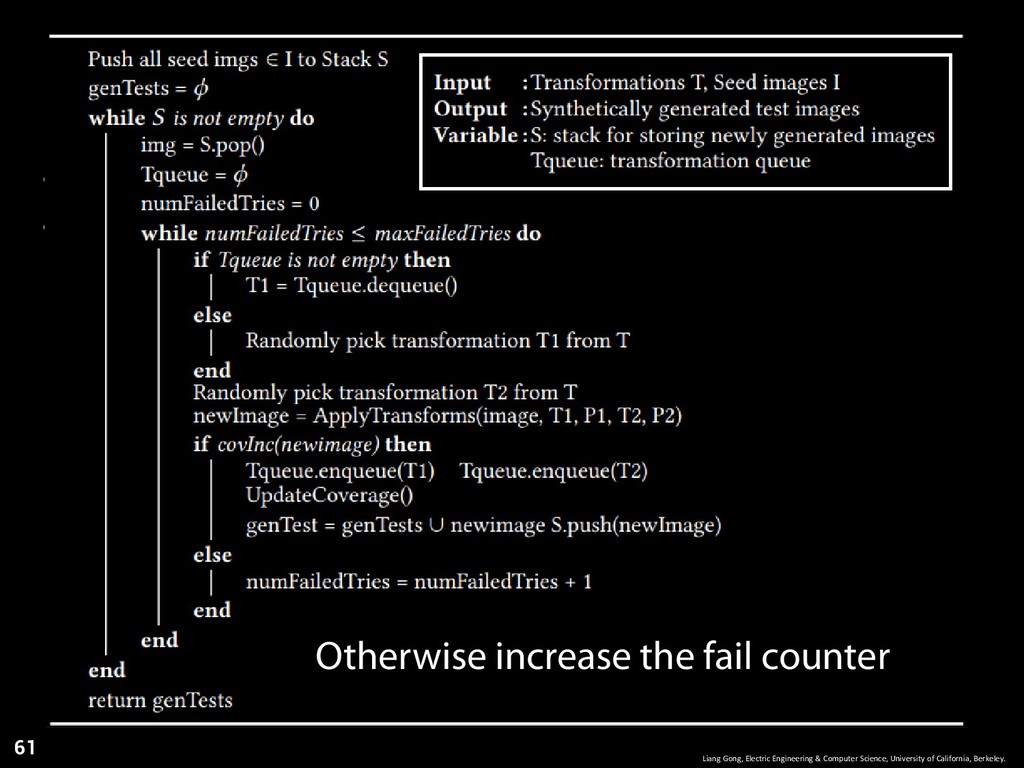
of California, Berkeley. 58 • Greedily combine transformations to images • Try to maximize the coverage dequeue or randomly pick a transformation with random parameters
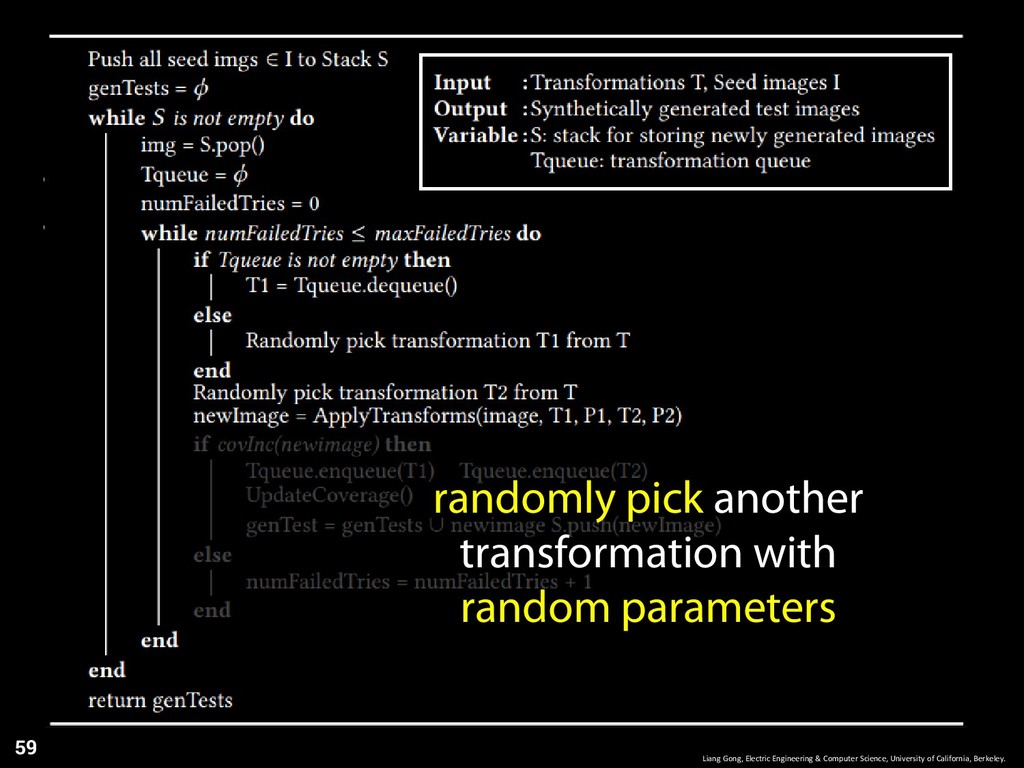
of California, Berkeley. 59 • Greedily combine transformations to images • Try to maximize the coverage randomly pick another transformation with random parameters
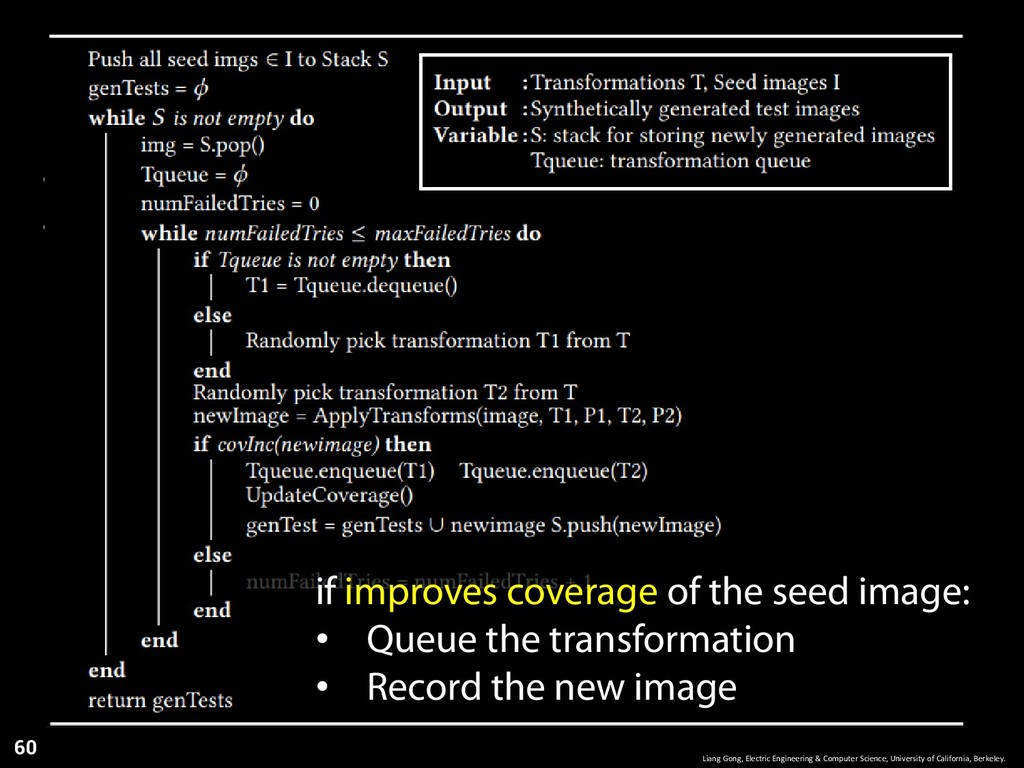
of California, Berkeley. 60 • Greedily combine transformations to images • Try to maximize the coverage if improves coverage of the seed image: • Queue the transformation • Record the new image
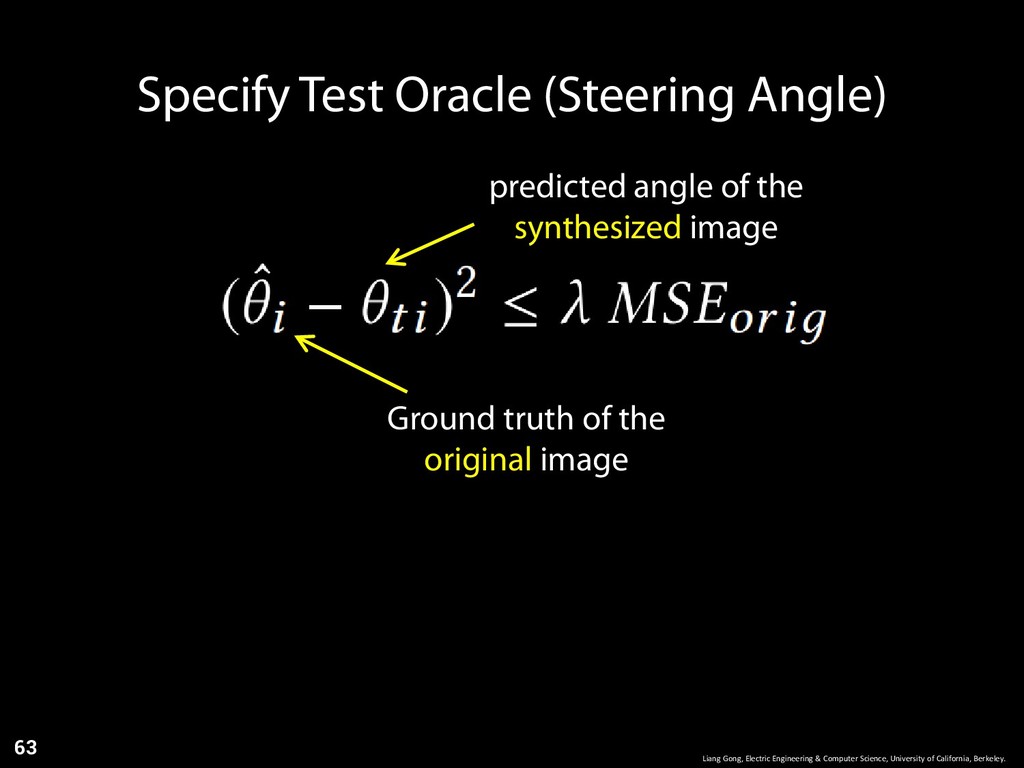
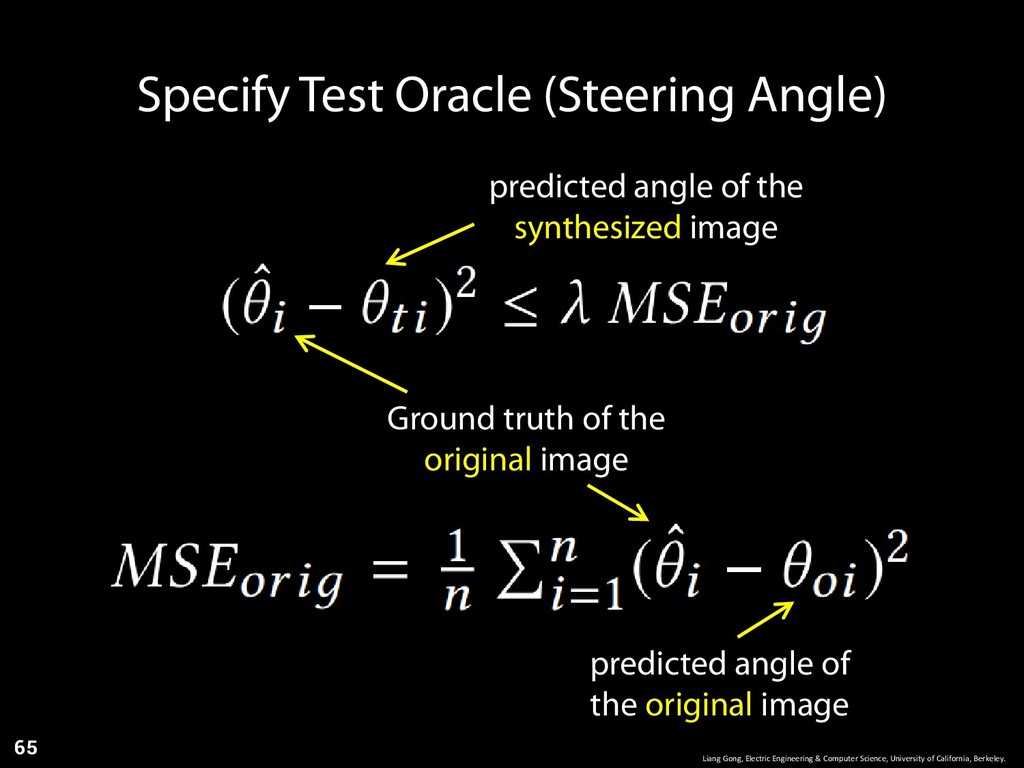
Computer Science, University of California, Berkeley. 65 predicted angle of the synthesized image Ground truth of the original image predicted angle of the original image
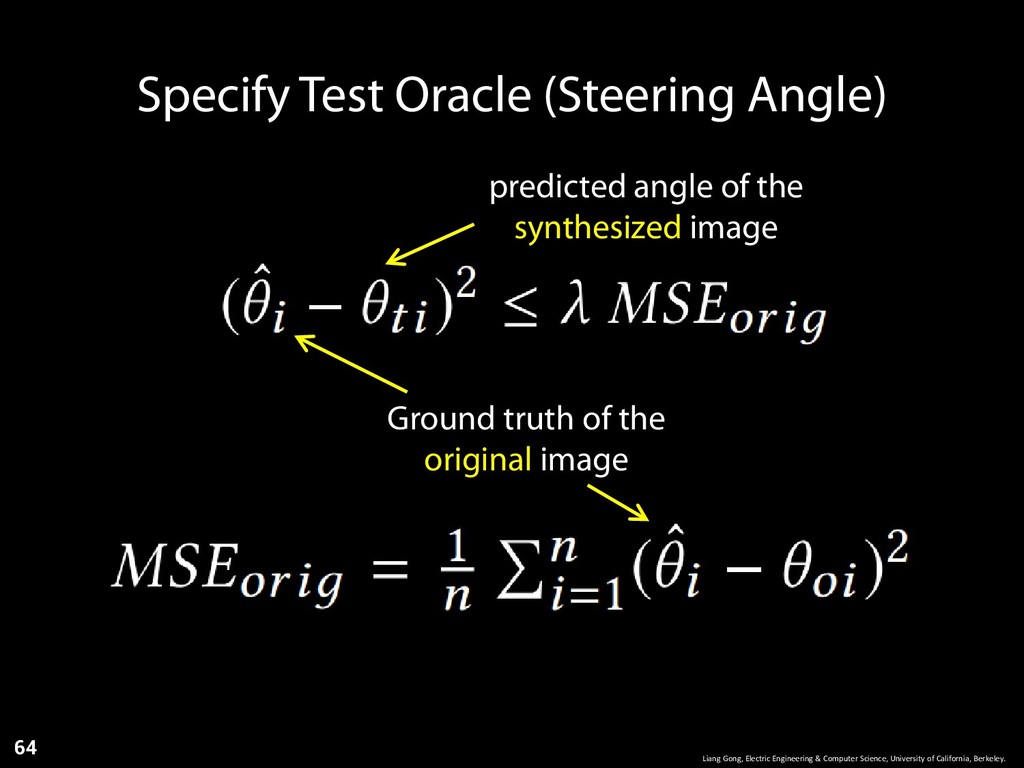
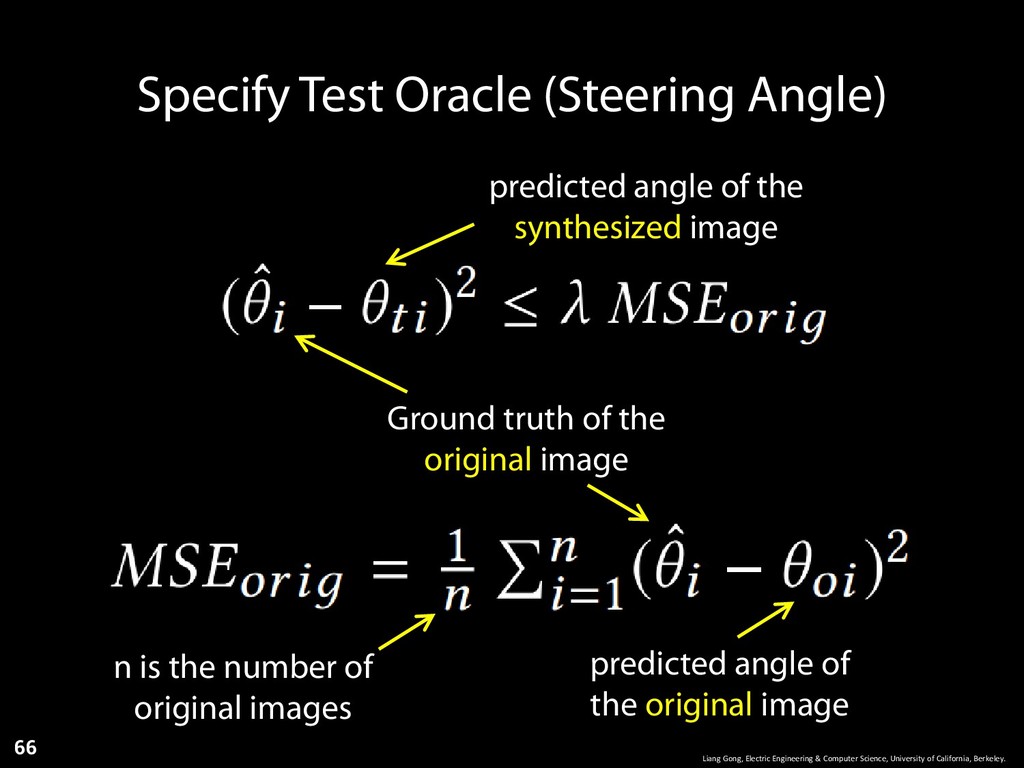
Computer Science, University of California, Berkeley. 66 predicted angle of the synthesized image Ground truth of the original image predicted angle of the original image n is the number of original images
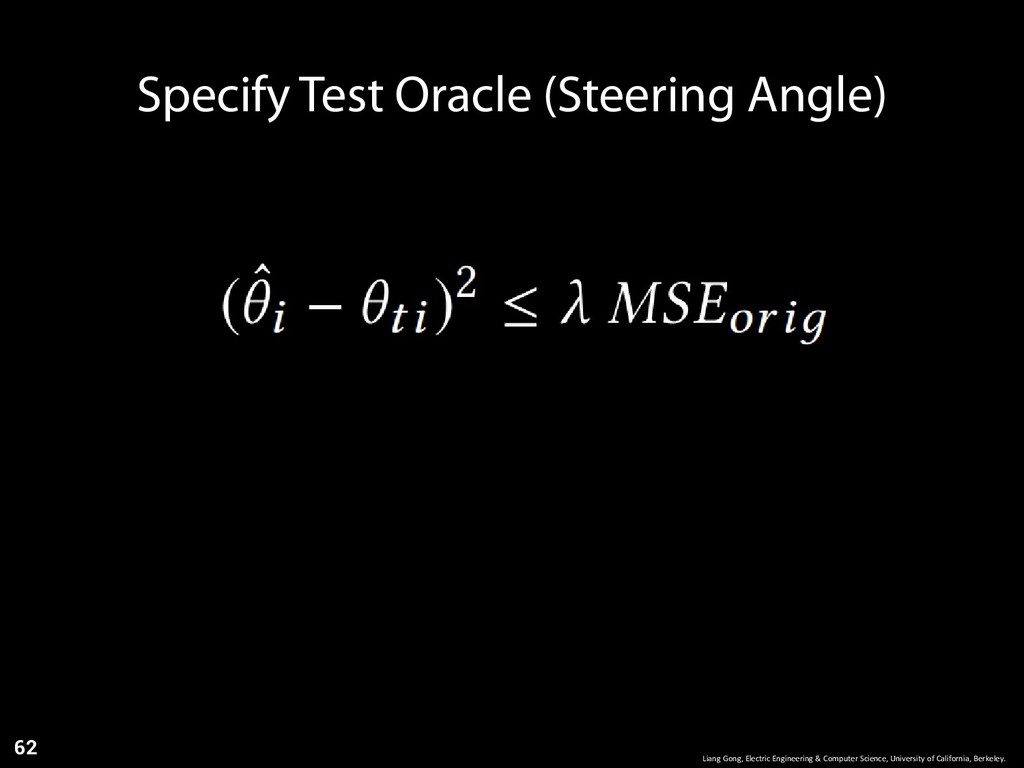
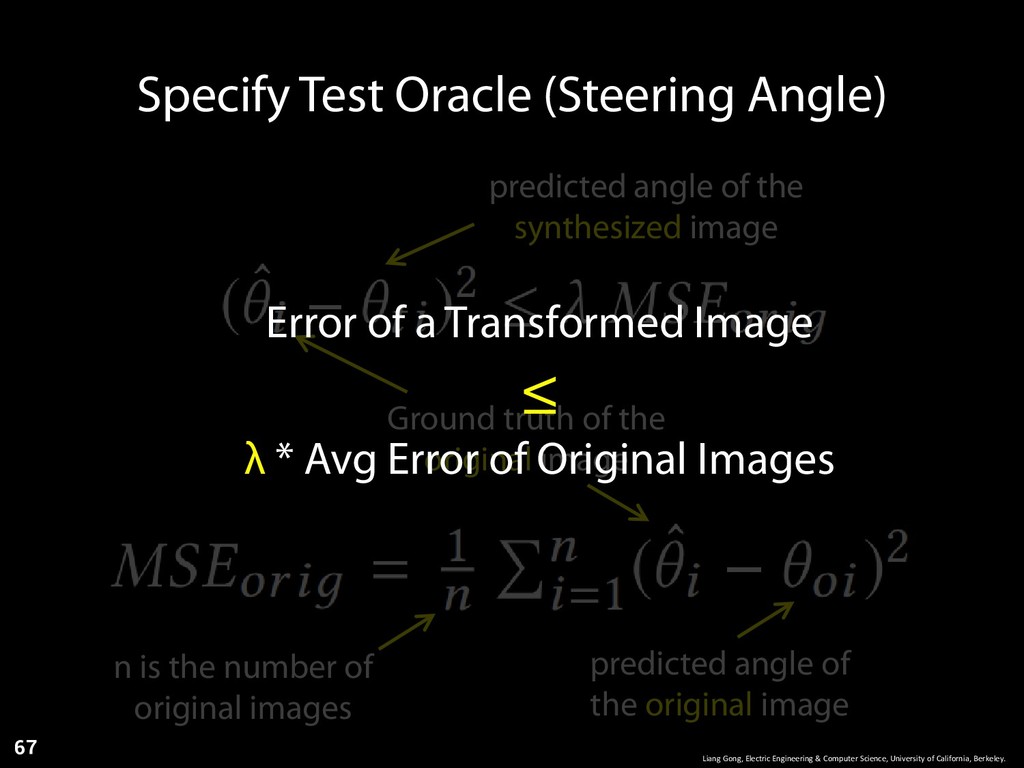
Computer Science, University of California, Berkeley. 67 predicted angle of the synthesized image Ground truth of the original image predicted angle of the original image n is the number of original images Error of a Transformed Image ≤ λ * Avg Error of Original Images
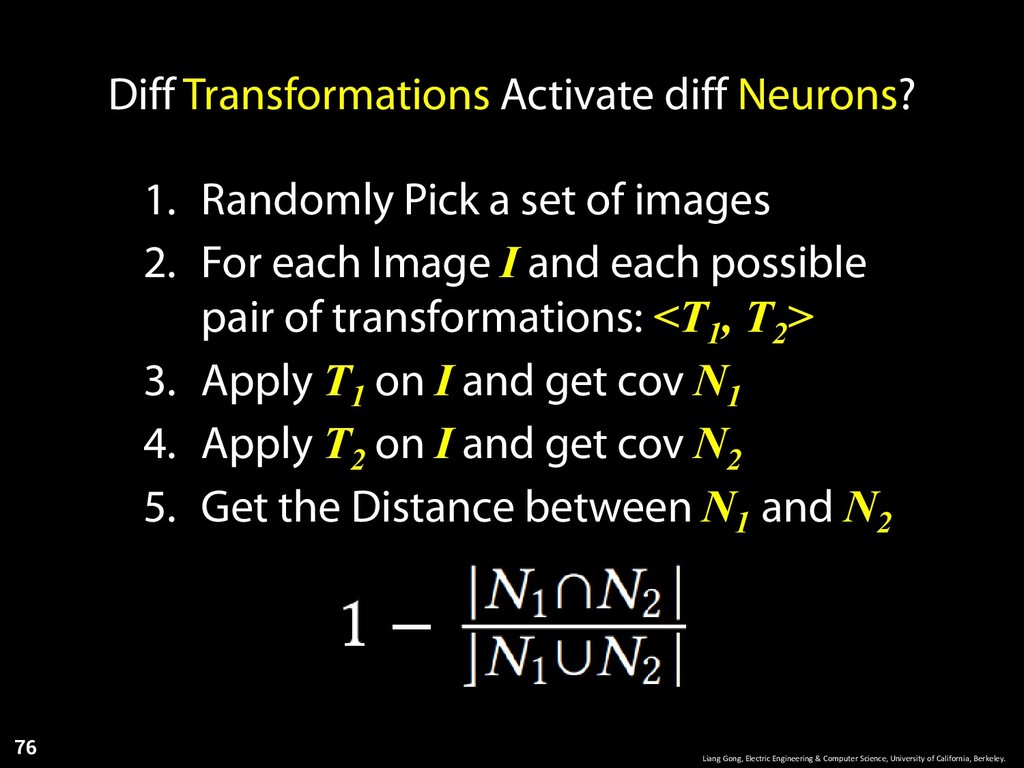
Computer Science, University of California, Berkeley. 76 1. Randomly Pick a set of images 2. For each Image I and each possible pair of transformations: <T1 , T2 > 3. Apply T1 on I and get cov N1 4. Apply T2 on I and get cov N2 5. Get the Distance between N1 and N2
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}