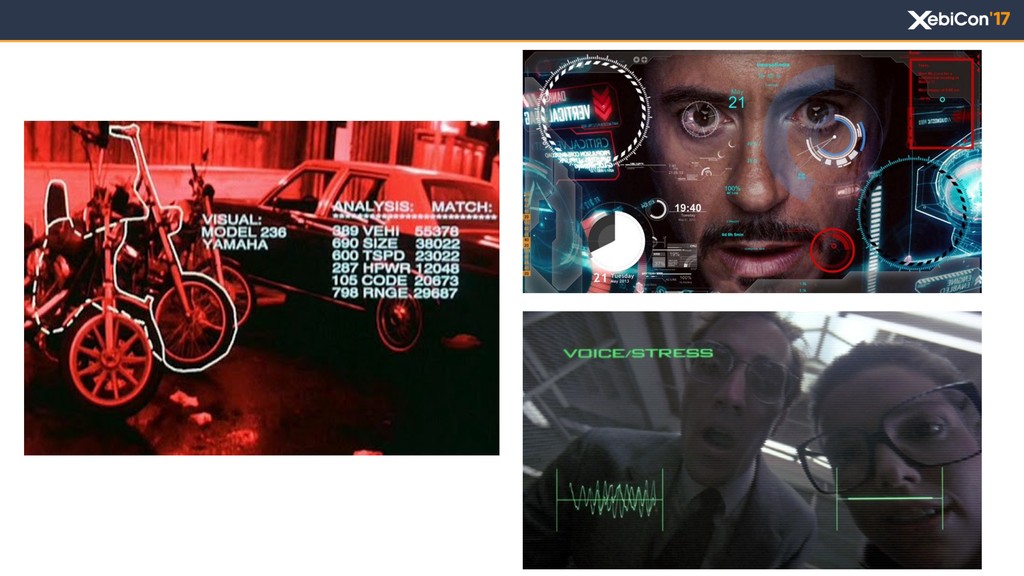
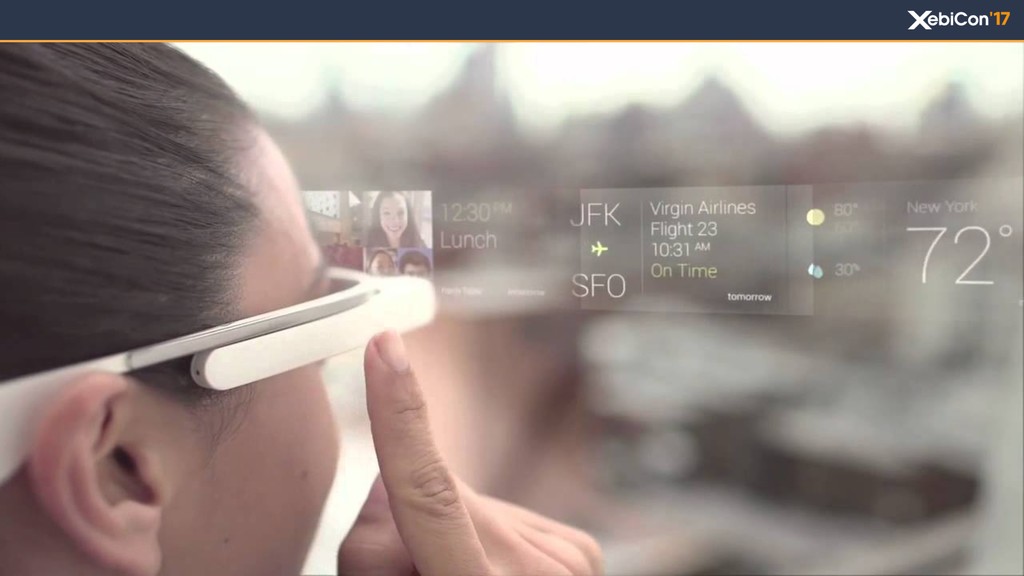
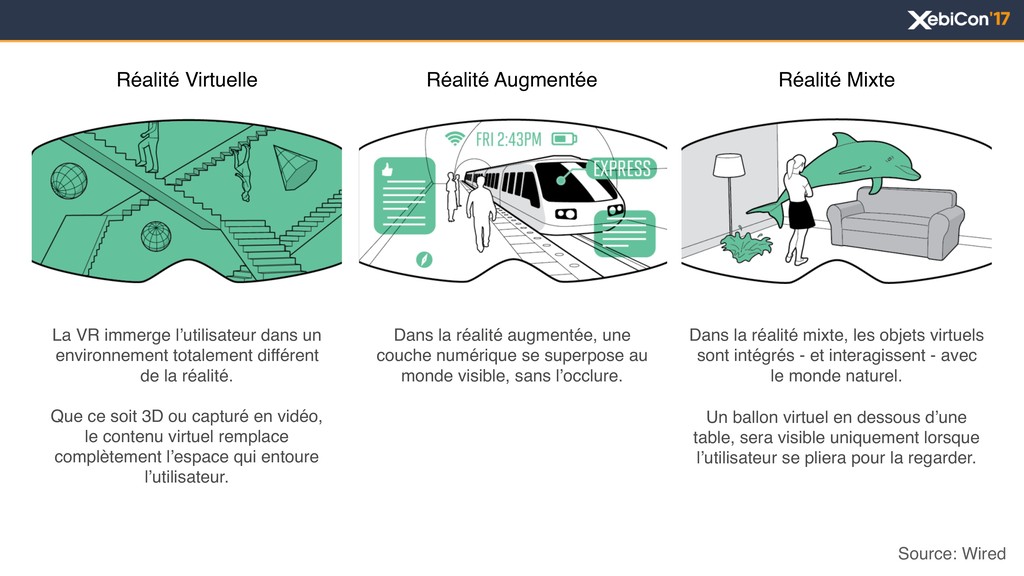
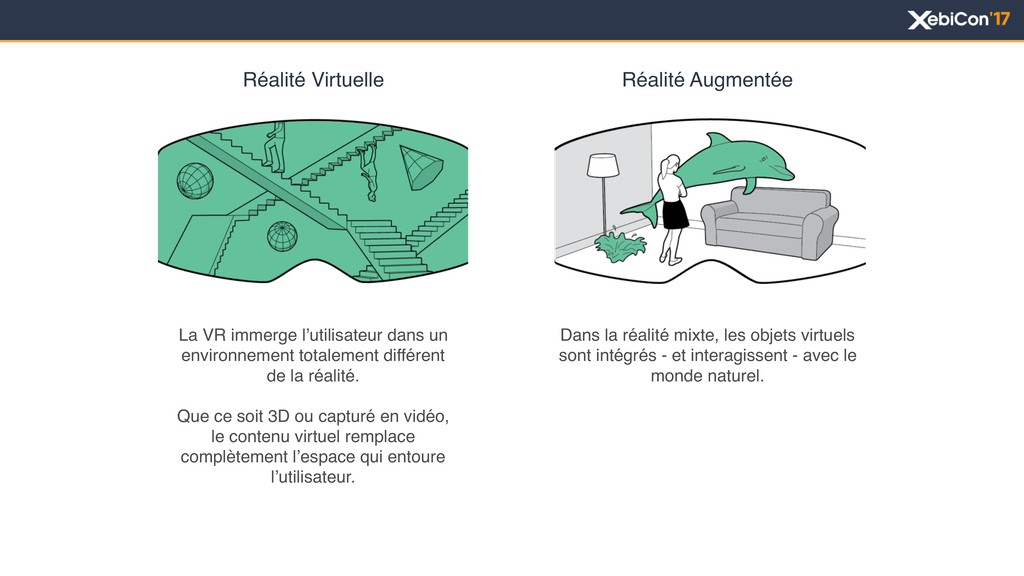
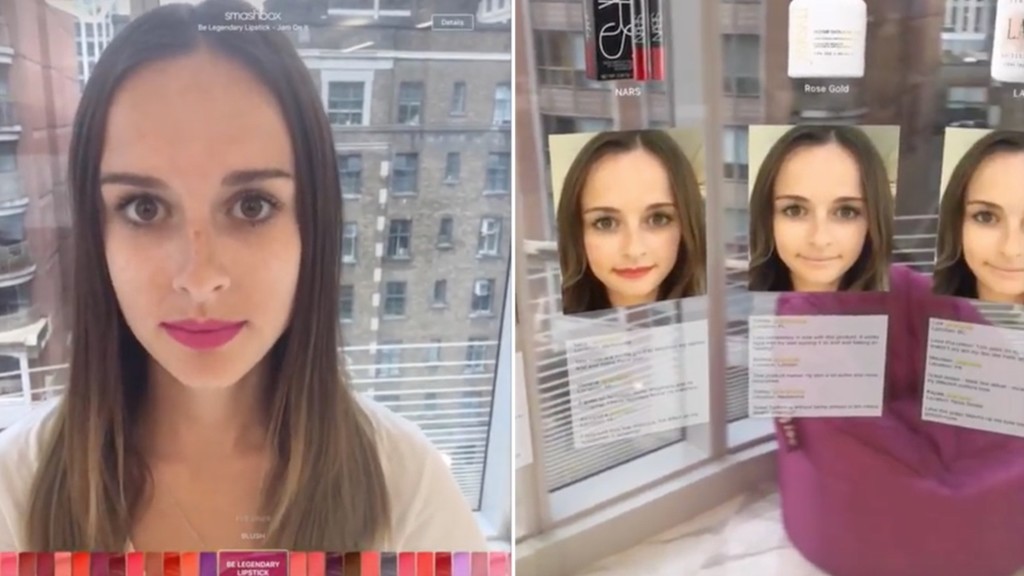
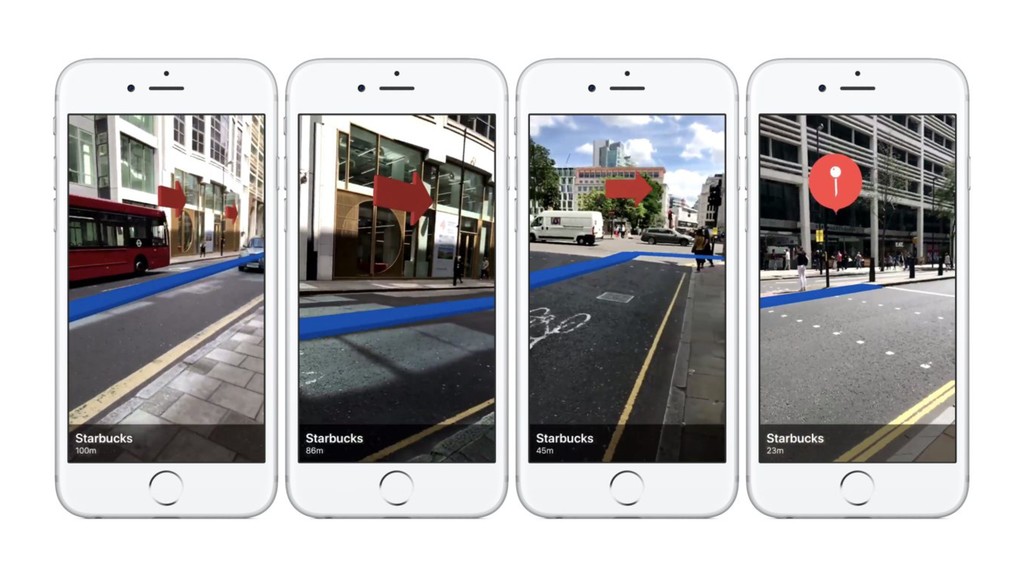
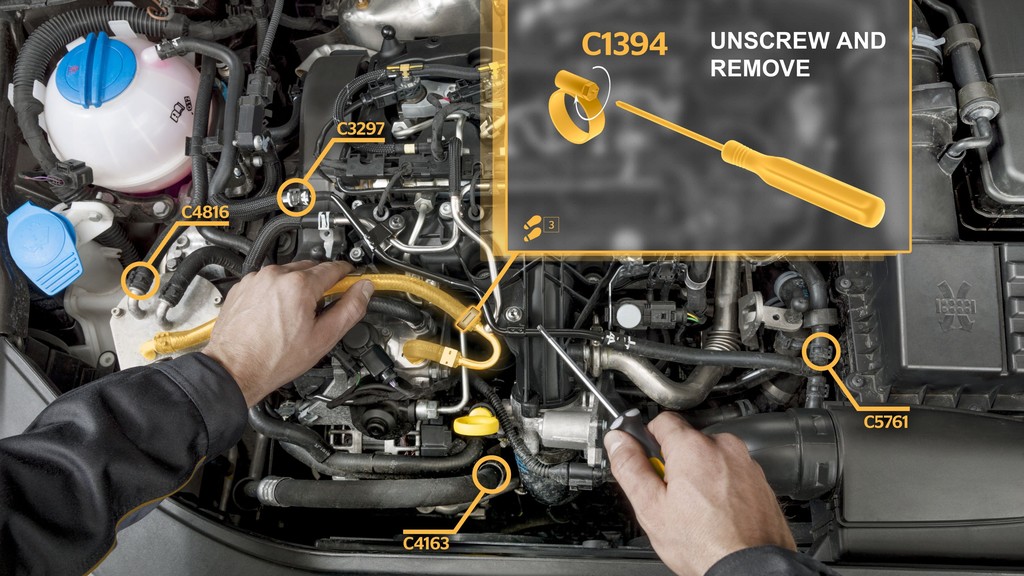
différent de la réalité. Que ce soit 3D ou capturé en vidéo, le contenu virtuel remplace complètement l’espace qui entoure l’utilisateur. Dans la réalité augmentée, une couche numérique se superpose au monde visible, sans l’occlure. Dans la réalité mixte, les objets virtuels sont intégrés - et interagissent - avec le monde naturel. Réalité Virtuelle Réalité Augmentée Réalité Mixte Un ballon virtuel en dessous d’une table, sera visible uniquement lorsque l’utilisateur se pliera pour la regarder.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![–Tim Cook “Over time, I think [these features] will be](https://files.speakerdeck.com/presentations/945b0c8dfe254b8084301cce2c724c66/slide_4.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}