AGVs, and Machine Learning for Multi-Robot Coordination AI24 – Lamarr Institute September 5th, 2024 Session 5: AI and Simulation Technologies in Intralogistics (Workshop Room 5)
are tools to help solve specific challenges. • To understand how to use the right tool for the job, we need to clearly define the job. • The job in question is related to Intralogistics. • Problem Definition: Given a number of robots tasked to autonomously transport goods inside a logistics facility, we need to coordinate their behavior by • Assigning the right task to the right robot, to accomplish them at the correct time, in the correct sequence while minimizing total travel time. • Assigning a route per robot so that each robot safely reaches its destination in the fastest time possible while avoiding potential congestions. • Ensure the maximum availability of robots while warranting an extended battery lifetime. 2
vs Multi-Agent intelligence • Decentralized vs Centralized • Responsibility (agent vs central system) based on Decision • Simulation • A tool for understanding and experimenting • Simulation fidelity requirements • What can/should be reliably simulated? 5
AGVs, and Machine Learning for Multi-Robot Coordination and how AI and Simulation can help AI24 – Lamarr Institute September 5th, 2024 Session 5: AI and Simulation Technologies in Intralogistics (Workshop Room 5) Challenges of
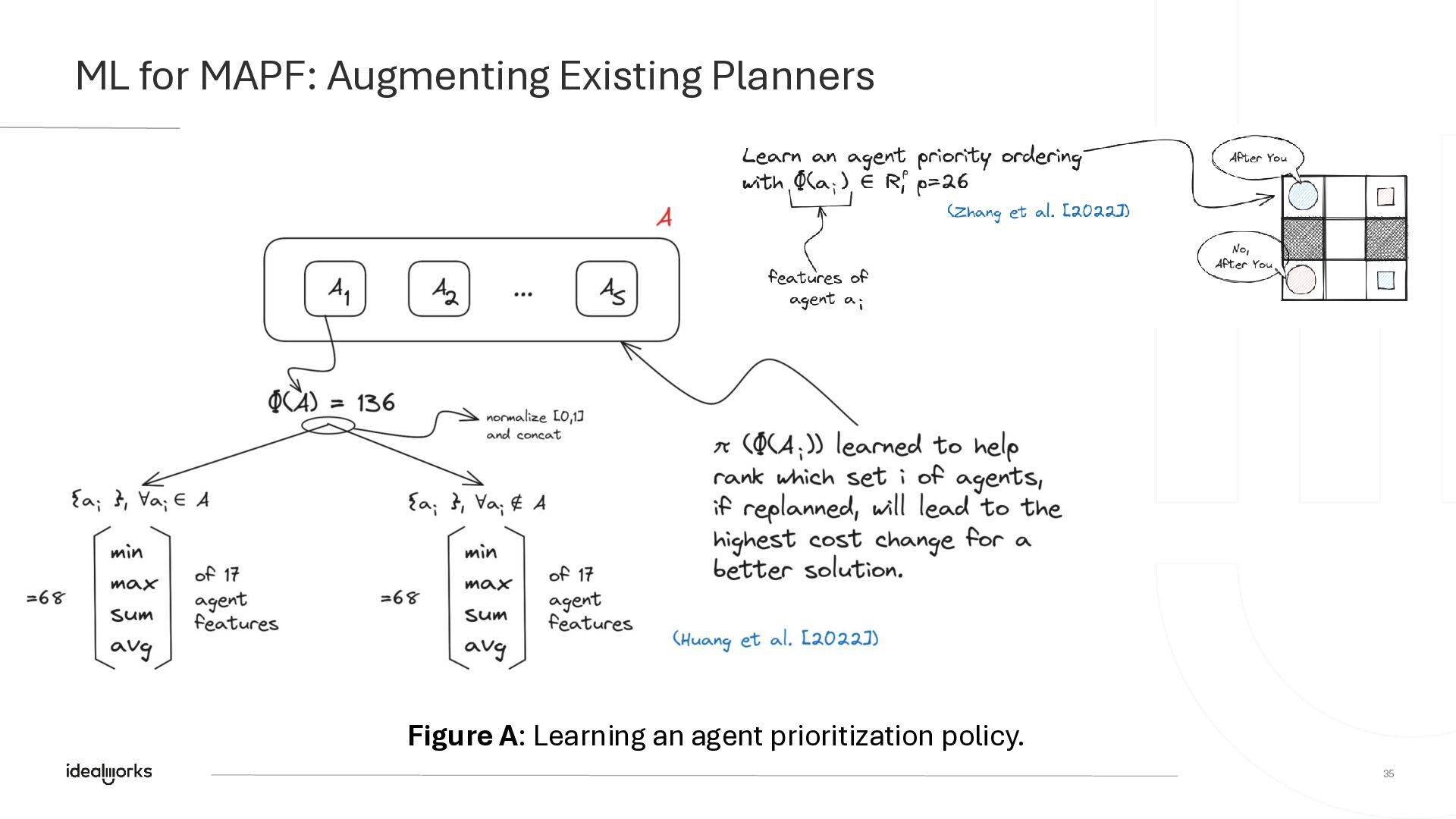
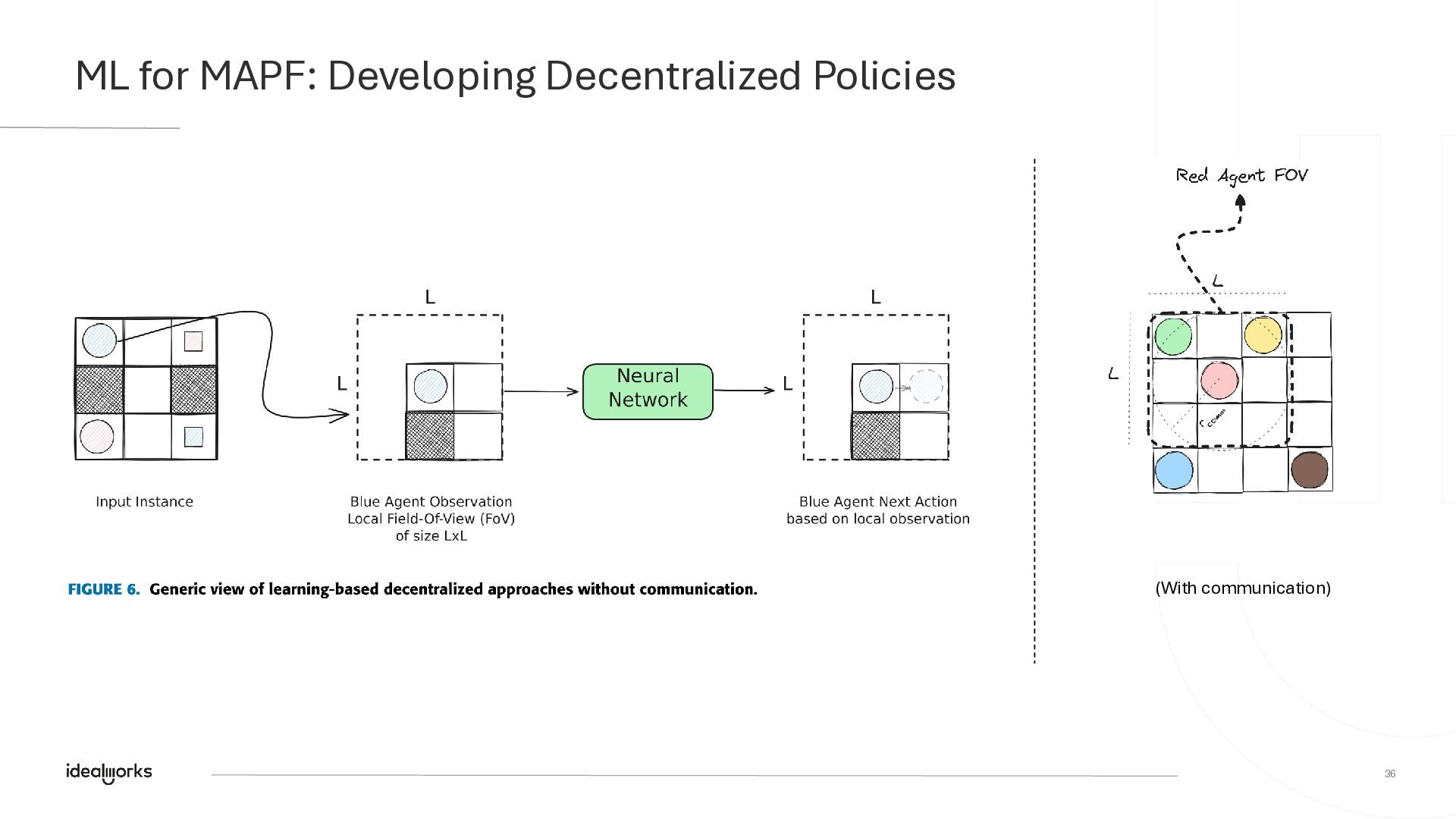
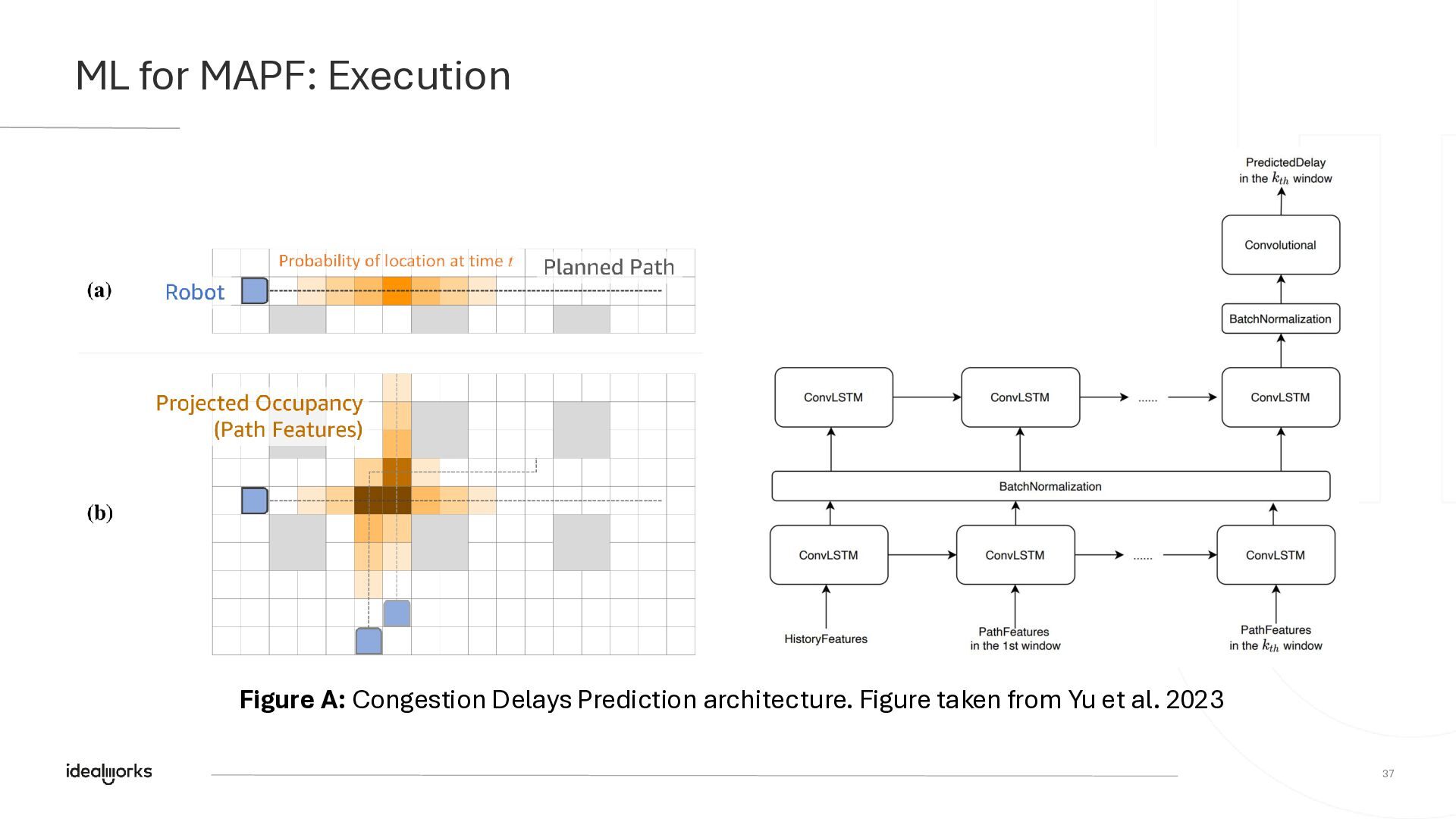
Finding the right Balance in Robotic Systems • Leveraging Machine Learning for Multi-Agent Path Finding • The Role of Simulation in Developing Robust Autonomous Ecosystems 7
Finding the right Balance in Robotic Systems • Leveraging Machine Learning for Multi-Agent Path Finding • The Role of Simulation in Developing Robust Autonomous Ecosystems 8
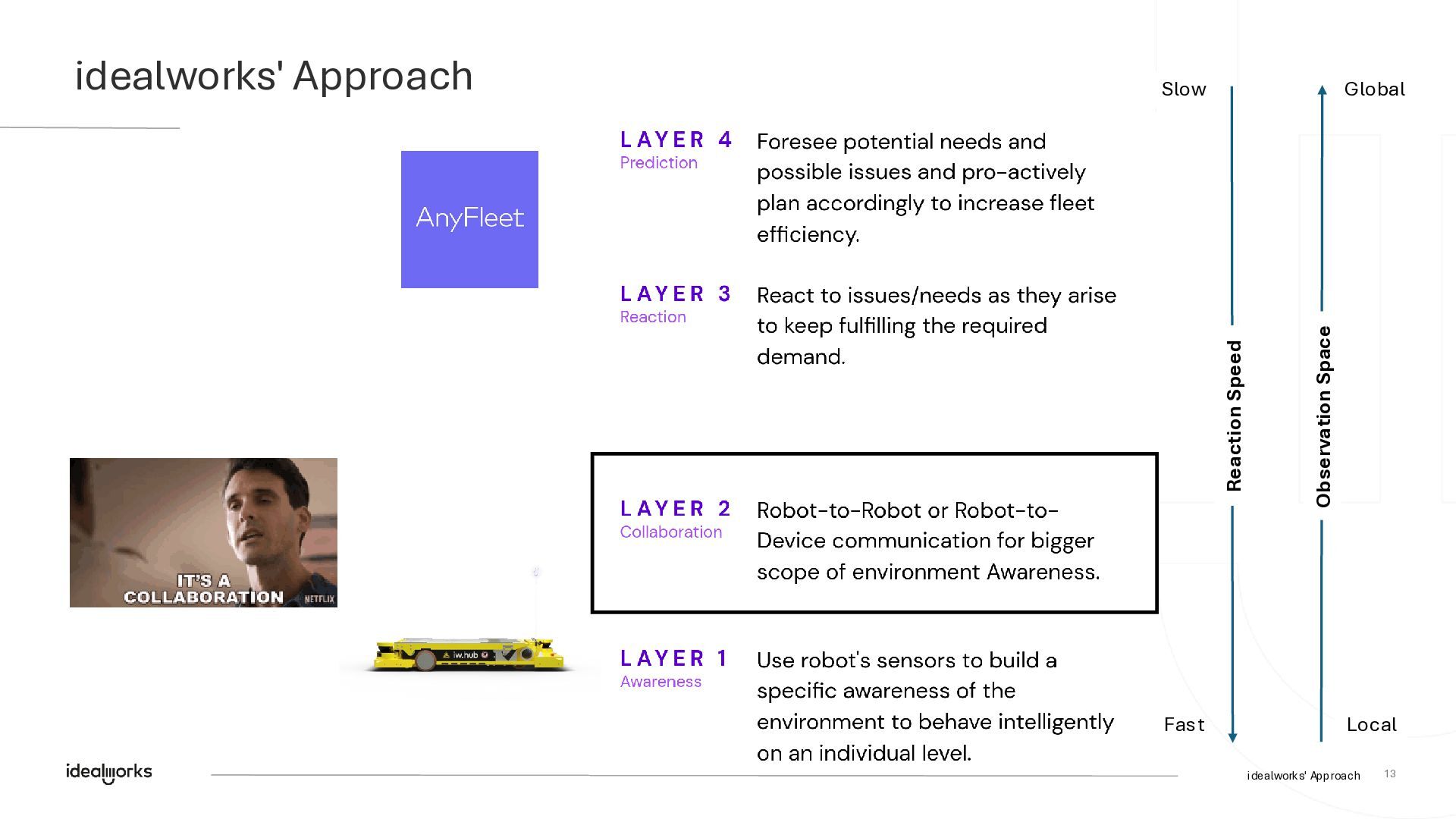
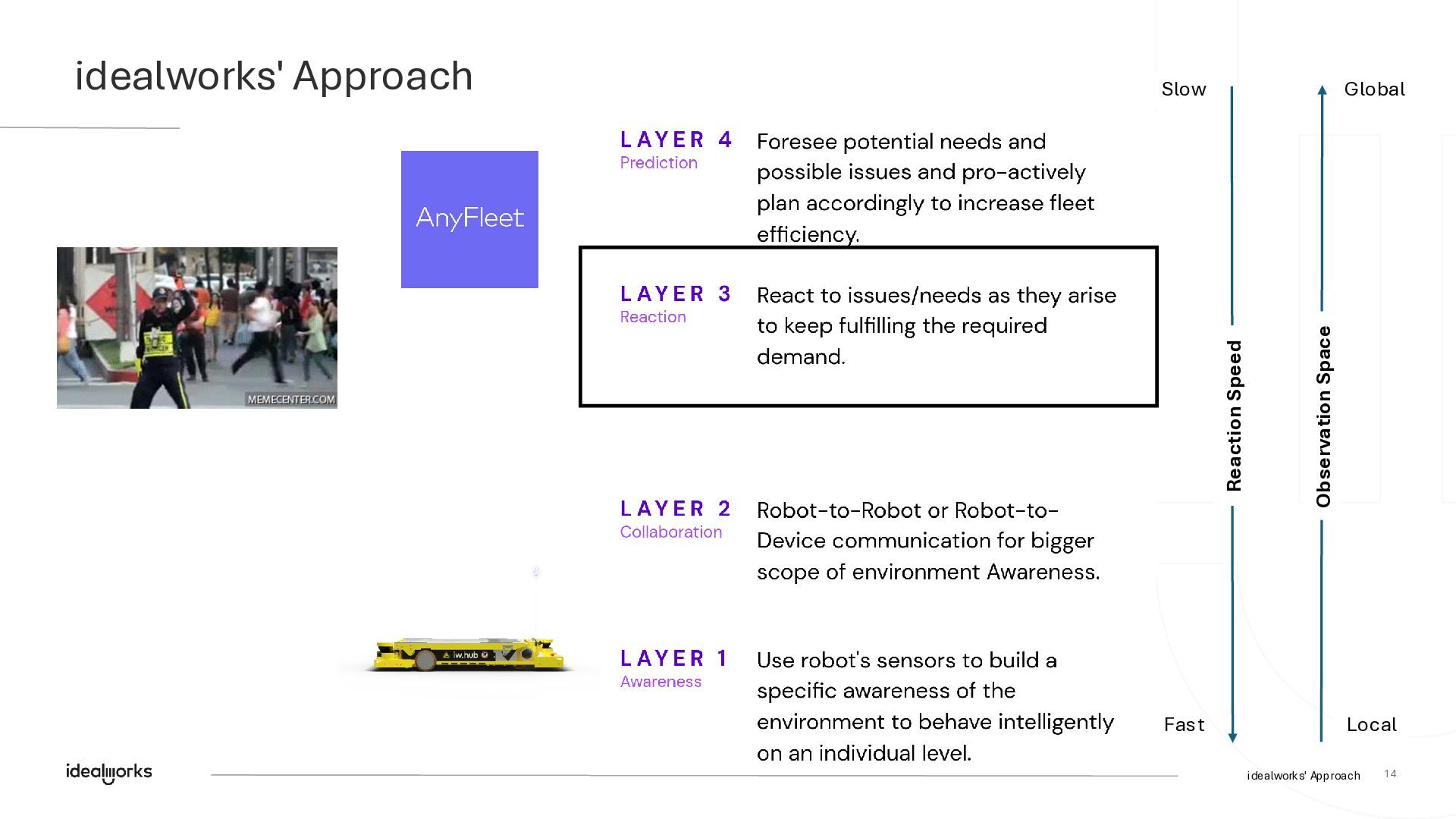
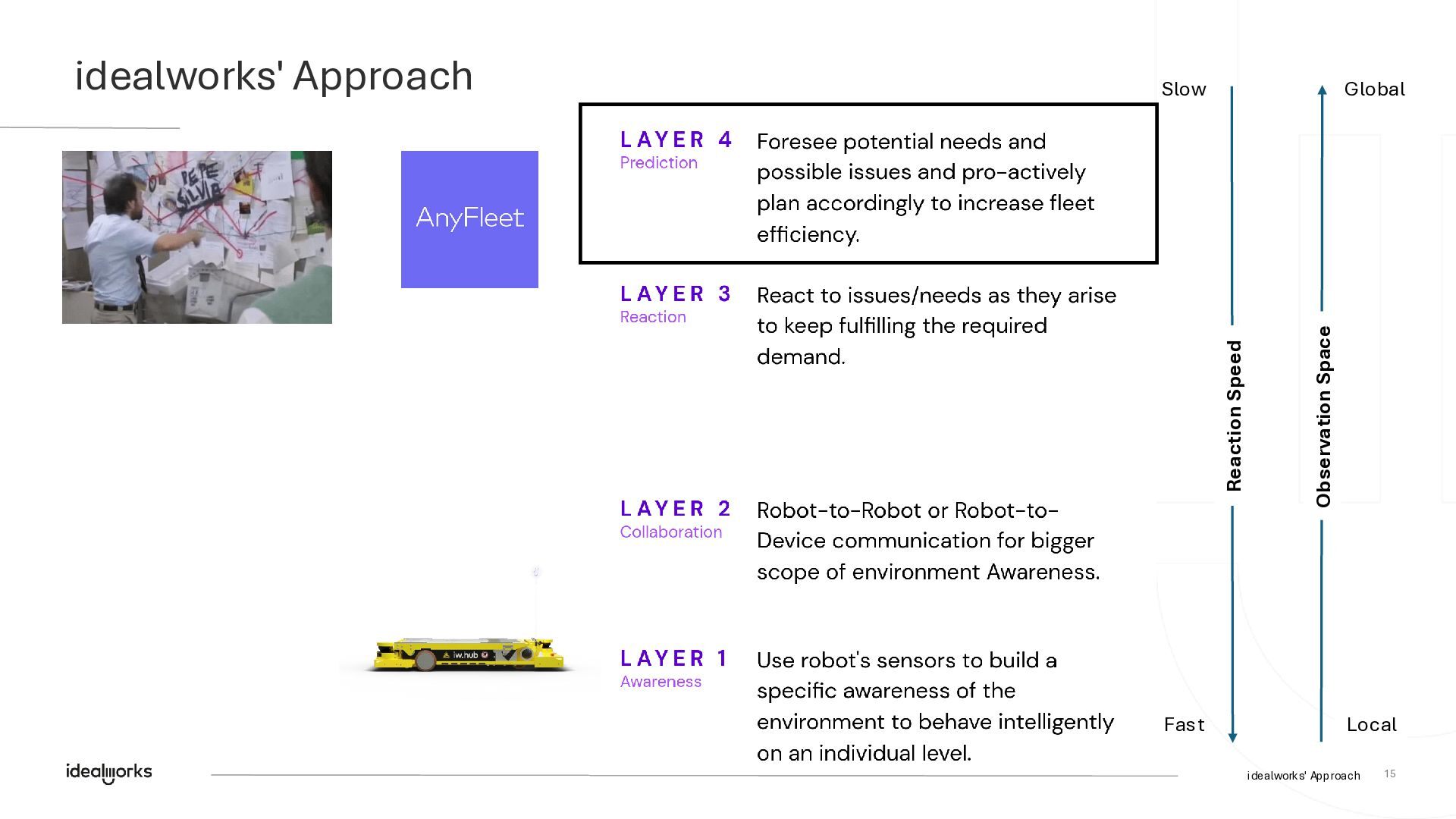
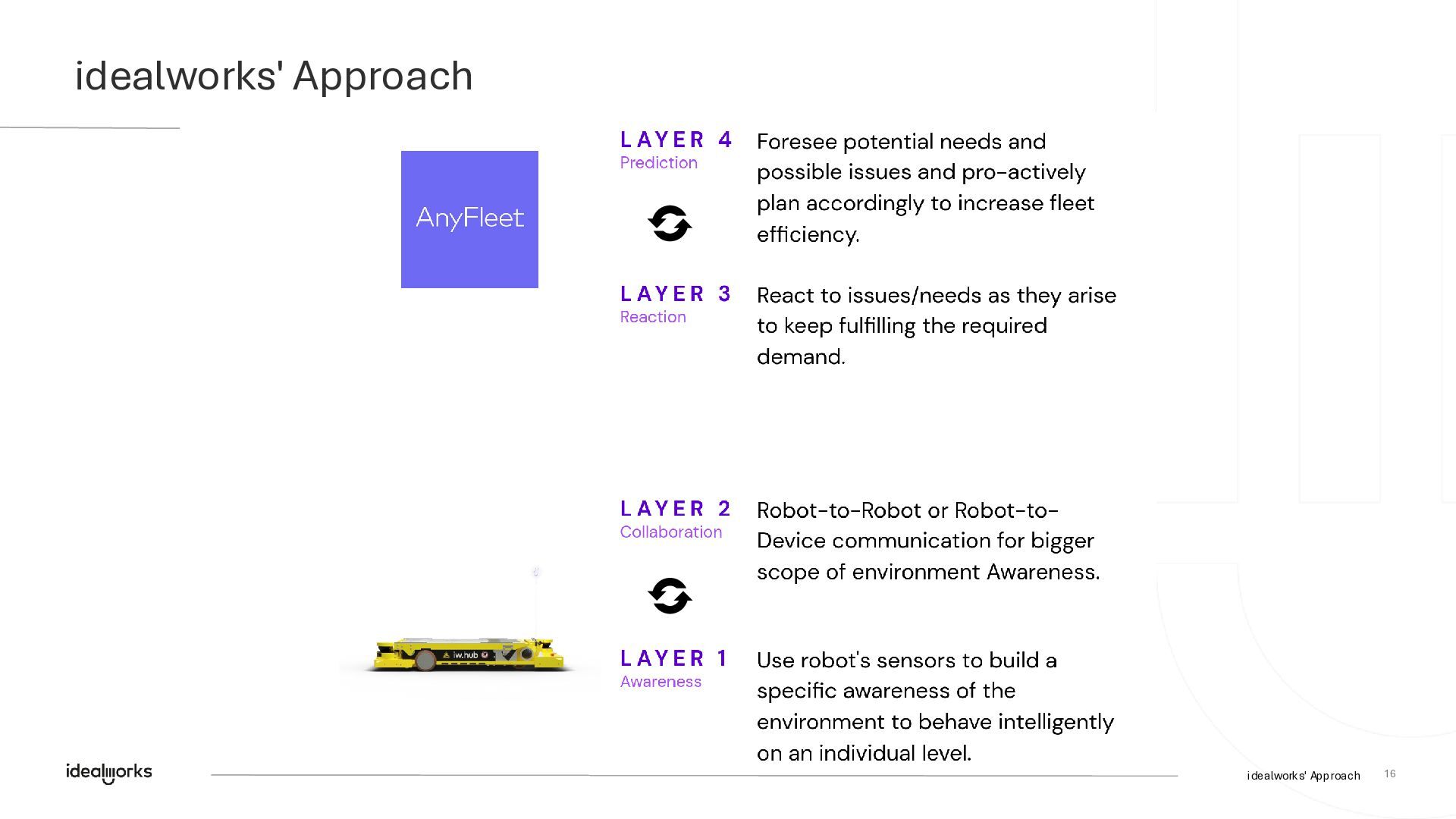
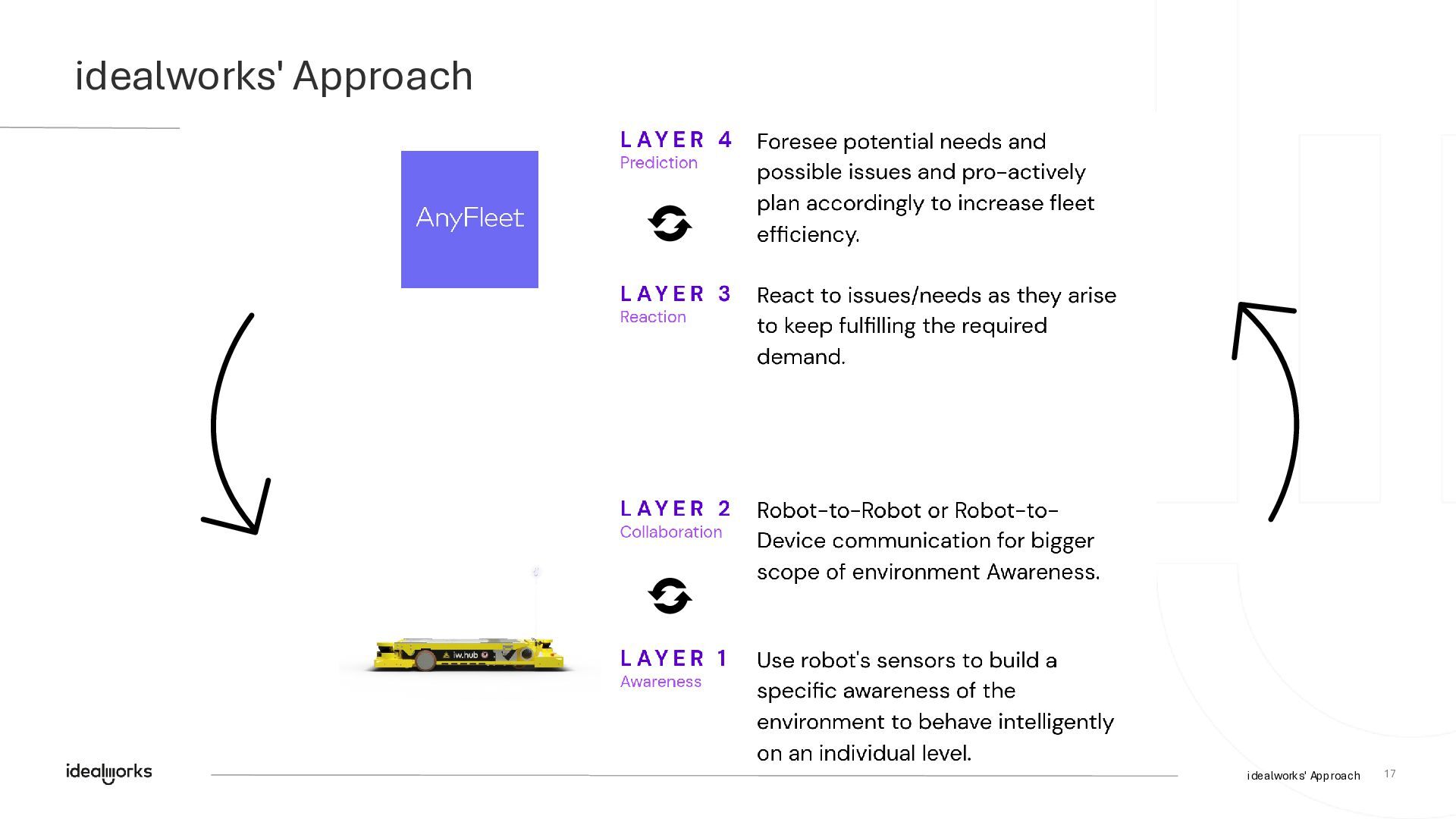
problem, an orchestrating system is used. At idealworks, it is AnyFleet. • The Fleet Management System (FMS) is responsible for deciding • Which robot is assigned to which task • Which route should each robot take to achieve its task • When should each robot go to a charging/parking spot to ensure 24/7 operation • … 9
intelligence based on the decision to be made? • When should the robot decide on its own, when should it ask for permission, and how to decide on the required responsibilities? 10
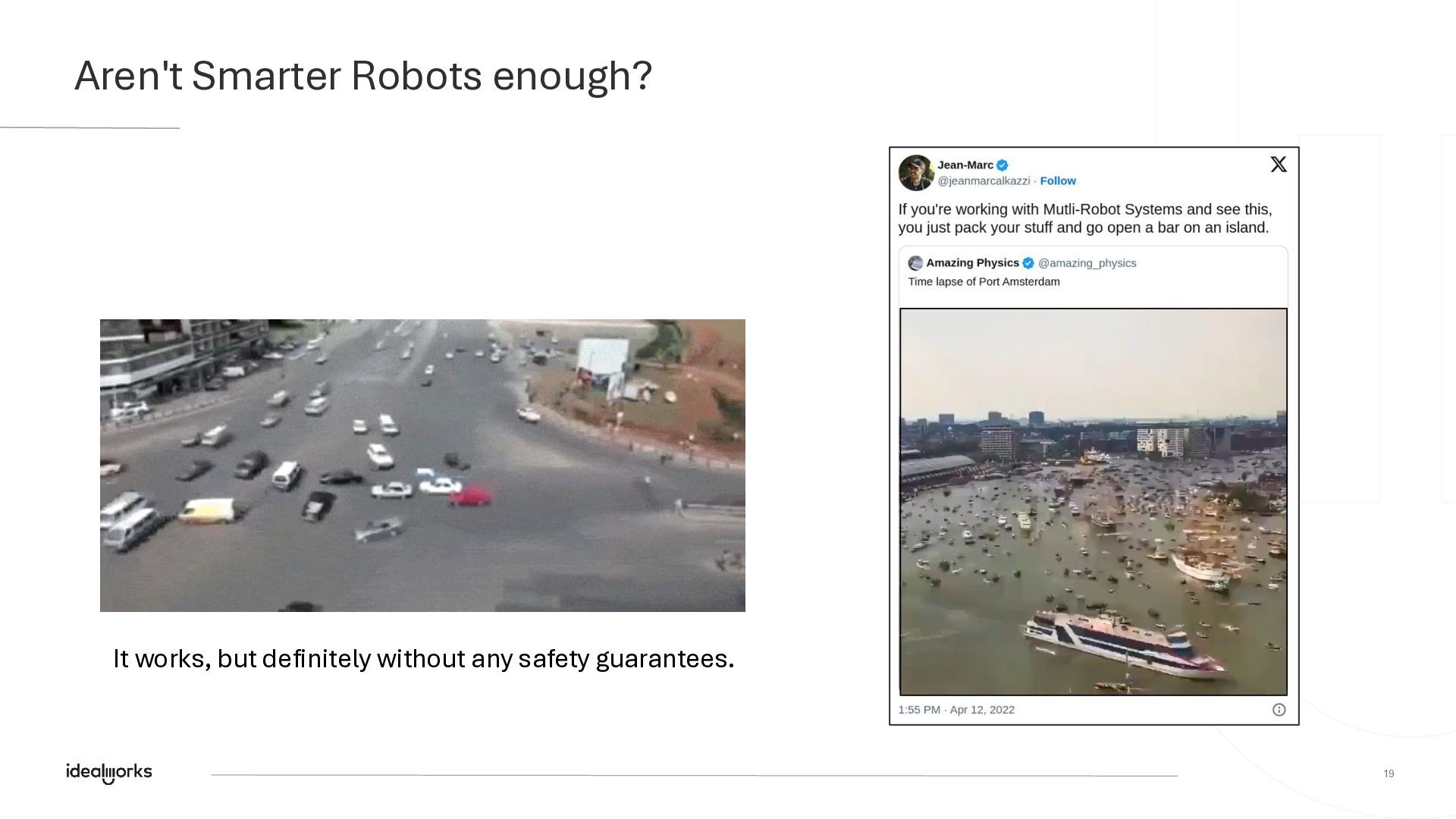
Robot • AGV = Automated Guided Vehicle • Side 1: Always use smart AMRs! AMRs are the future! • Side 2: You don't need intelligence with a good centralized system! Use AGVs for deterministic behavior! 23
& Control • Limited control over integrated robots’ autonomy • Diverse decision-making processes across FMS based on providers • Lack of widespread robot-to-robot collaboration standards (Layer 2) • Latency Issues • Observation gathering delays • Reaction time delays • Execution delays in chaotic environments 25
Finding the right Balance in Robotic Systems • Leveraging Machine Learning for Multi-Agent Path Finding • The Role of Simulation in Developing Robust Autonomous Ecosystems 27
Finding the right Balance in Robotic Systems • Leveraging Machine Learning for Multi-Agent Path Finding • The Role of Simulation in Developing Robust Autonomous Ecosystems 38
Testing any hypothesis we previously discussed is time/resource consuming. • To stay ahead, we need to increase our development iteration speed. • Grid simulation helps you test faster, but does not reflect the real world (unless you have a structured field e.g., Amazon Robotics with floor QR codes) • We need to simulate what makes our problem challenging • Delays (Observation, Reaction, Execution) • Chaos • Sudden failures of robots or FMS services • … 39
approach to using Simulation • Statistically modelling the environment • Simple but scalable 2D Simulation (Focus on testing AnyFleet Services) • Complex but realistic 3D Simulation (Focus on testing robots and final e2e) ALL of them are important! 40
fun writing sometimes at https://blog.jeremarc.com where you can also find links to other talks. Not a social media fan, but I use Twitter @jeanmarcalkazzi 45
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Aren't Smarter Robots enough? 20 [2024] Waymo Self-Driving Cars Humans](https://files.speakerdeck.com/presentations/d468da93a3d64db78ef854cedbf21b74/slide_19.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Where can you find more? [Stay for the Panel Discussion!]](https://files.speakerdeck.com/presentations/d468da93a3d64db78ef854cedbf21b74/slide_43.jpg){kind=link}
![How to stay in touch? Let's collaborate! [email protected] I have](https://files.speakerdeck.com/presentations/d468da93a3d64db78ef854cedbf21b74/slide_44.jpg){kind=link}