do which task? 2. Which route should each robot take? 3. Can the robots autonomously overtake each other? 4. When should we trust the robot's local decisions? 5. What to do in case of sudden congestion? 6. What if the robots can't resolve a deadlock on their own? 7. How can we optimize the overall travel distance during task assignment? 8. If a robot goes into a long narrow road, how can another robot know to not go in from the opposite direction if they can't even see each other? 9. How can robots from different vendors communicate to collaborate? 10.How should a robot know that a fire alarm is on, and it should go to a pre-defined safety location without causing congestions with others? 11.….
do which task? 2. Which route should each robot take? 3. Can the robots autonomously overtake each other? 4. When should we trust the robot's local decisions? 5. What to do in case of sudden congestion? 6. What if the robots can't resolve a deadlock on their own? 7. How can we optimize the overall travel distance during task assignment? 8. If a robot goes into a long narrow road, how can another robot know to not go in from the opposite direction if they can't even see each other? 9. How can robots from different vendors communicate to collaborate? 10.How should a robot know that a fire alarm is on, and it should go to a pre-defined safety location without causing congestions with others? 11.….
Task Assignment • For each triggered Task, assign a robot to accomplish it. • Track Tasks to figure out when they are completed. • Respect different rules per factory. Route Planning • For each robot, propose the best possible route to avoid congestions. • Track robot movements and factory state to update routes accordingly. • Support robots which can generate their own route (AMRs) as well as those which can't (AGVs). Charging Strategy • Sustain a high throughput of accomplishing missions by charging robots just when necessary. • Execute a charging strategy which extends the robot's battery lifetime. • Charge robots in preparation for expected high throughput.
cases, maybe yes. In Some other cases, not really. How do you adapt based on situation, robots, and external factors? Especially with our iw.hub! Even with the above "human- level" intelligence.
Task Assignment • For each triggered Task, assign a robot to accomplish it. • Track Tasks to figure out when they are completed. • Respect different rules per factory. Route Planning • For each robot, propose the best possible route to avoid congestions. • Track robot movements and factory state to update routes accordingly. • Support robots which can generate their own route (AMRs) as well as those which can't (AGVs). Charging Strategy • Sustain a high throughput of accomplishing missions by charging robots just when necessary. • Execute a charging strategy which extends the robot's battery lifetime. • Charge robots in preparation for expected high throughput.
Task Assignment • For each triggered Task, assign a robot to accomplish it. • Track Tasks to figure out when they are completed. • Respect different rules per factory. Route Planning • For each robot, propose the best possible route to avoid congestions. • Track robot movements and factory state to update routes accordingly. • Support robots which can generate their own route (AMRs) as well as those which can't (AGVs). Charging Strategy • Sustain a high throughput of accomplishing missions by charging robots just when necessary. • Execute a charging strategy which extends the robot's battery lifetime. • Charge robots in preparation for expected high throughput.
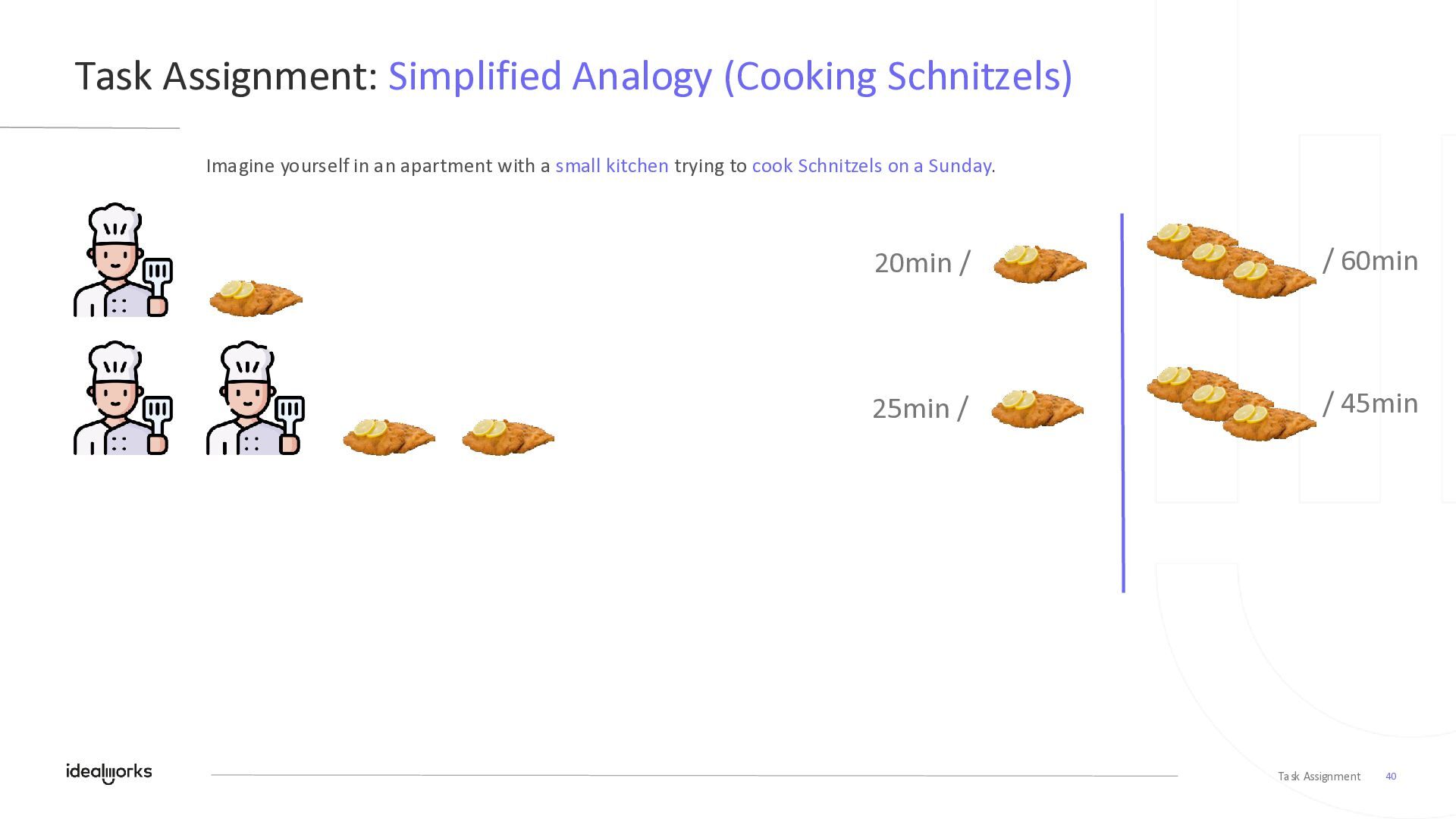
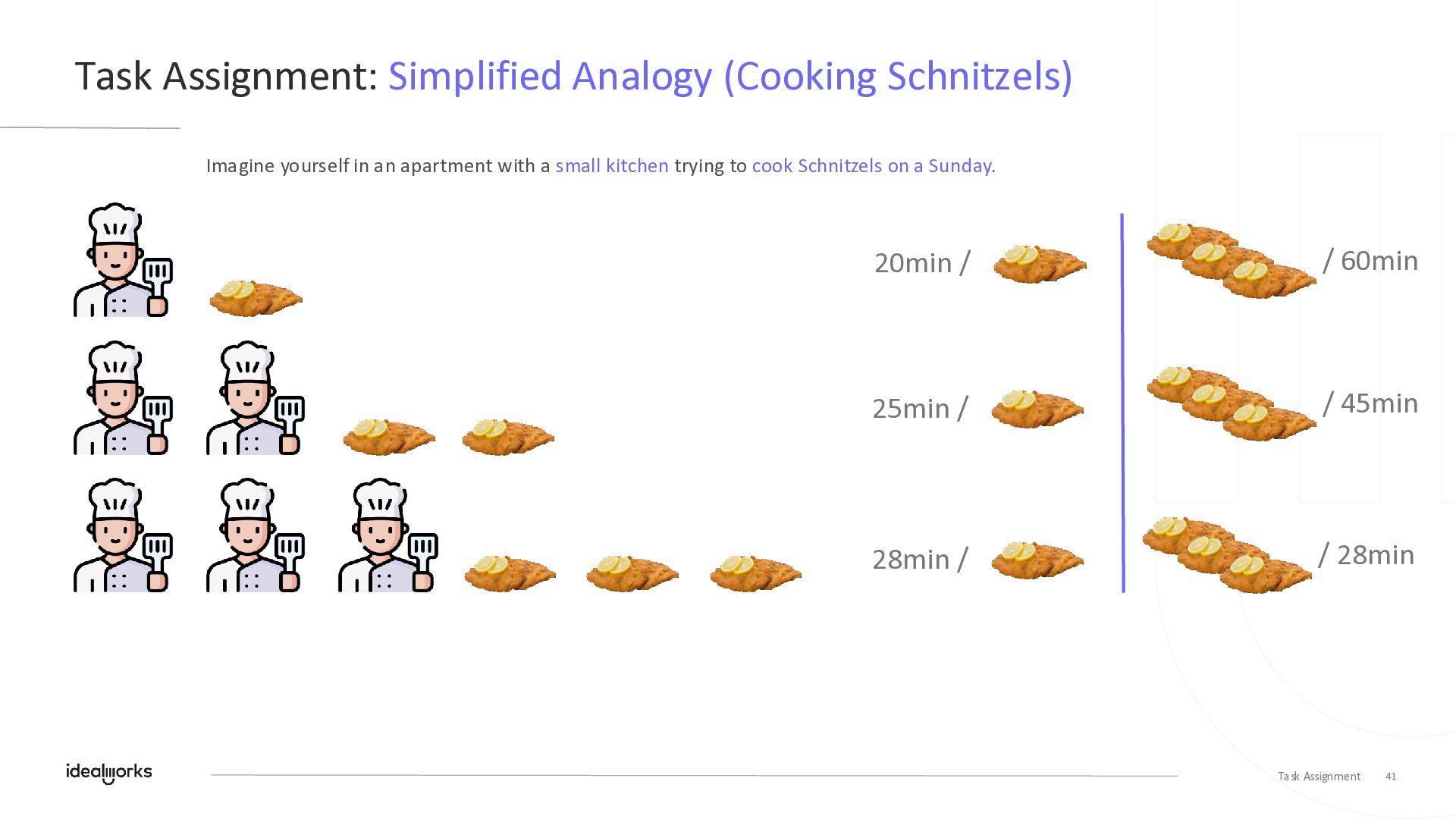
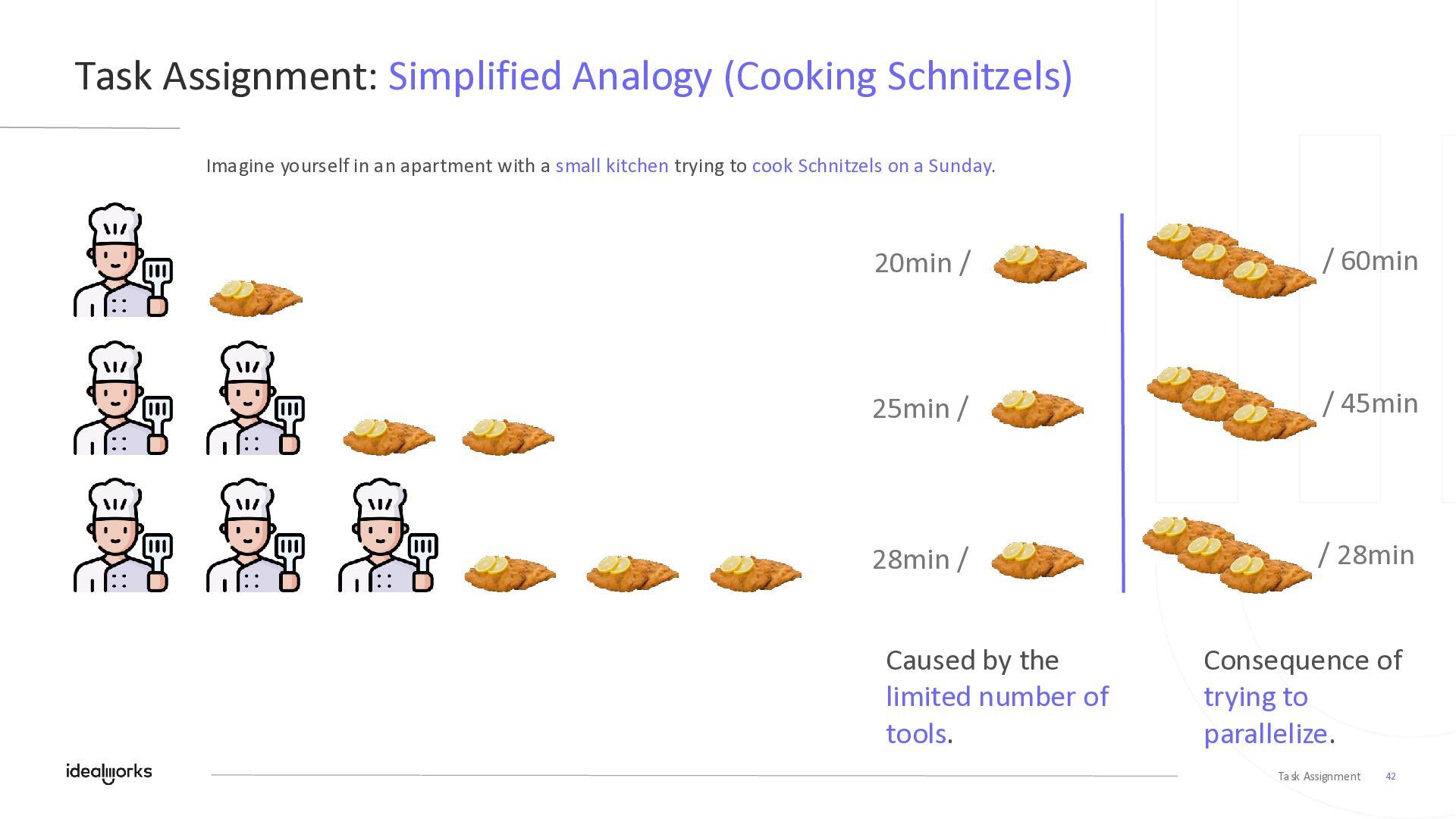
/ / 60min 25min / 28min / / 45min / 28min Caused by the limited number of tools. Consequence of trying to parallelize. Imagine yourself in an apartment with a small kitchen trying to cook Schnitzels on a Sunday.
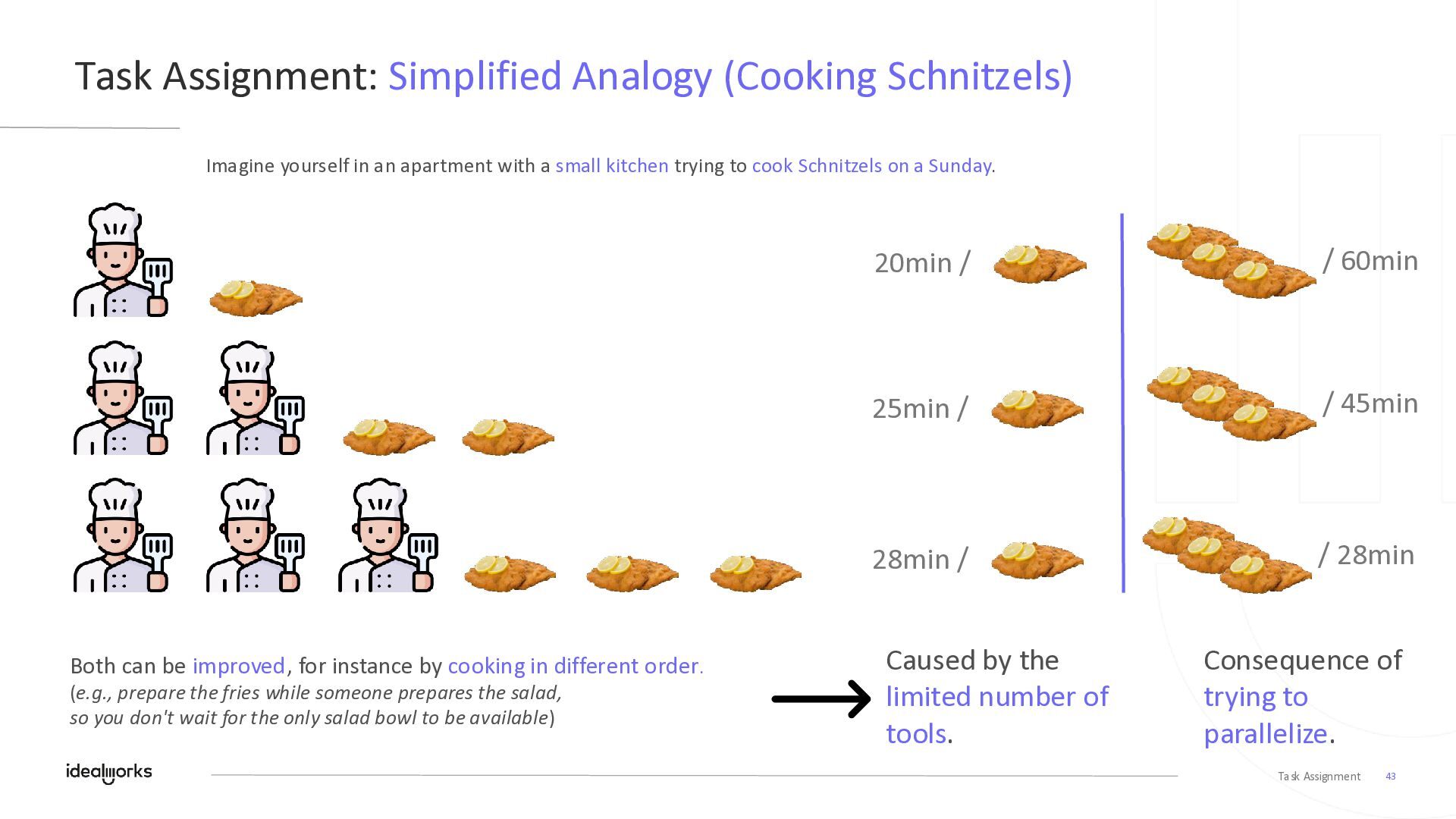
/ / 60min 25min / 28min / / 45min / 28min Both can be improved, for instance by cooking in different order. (e.g., prepare the fries while someone prepares the salad, so you don't wait for the only salad bowl to be available) Imagine yourself in an apartment with a small kitchen trying to cook Schnitzels on a Sunday. Caused by the limited number of tools. Consequence of trying to parallelize.
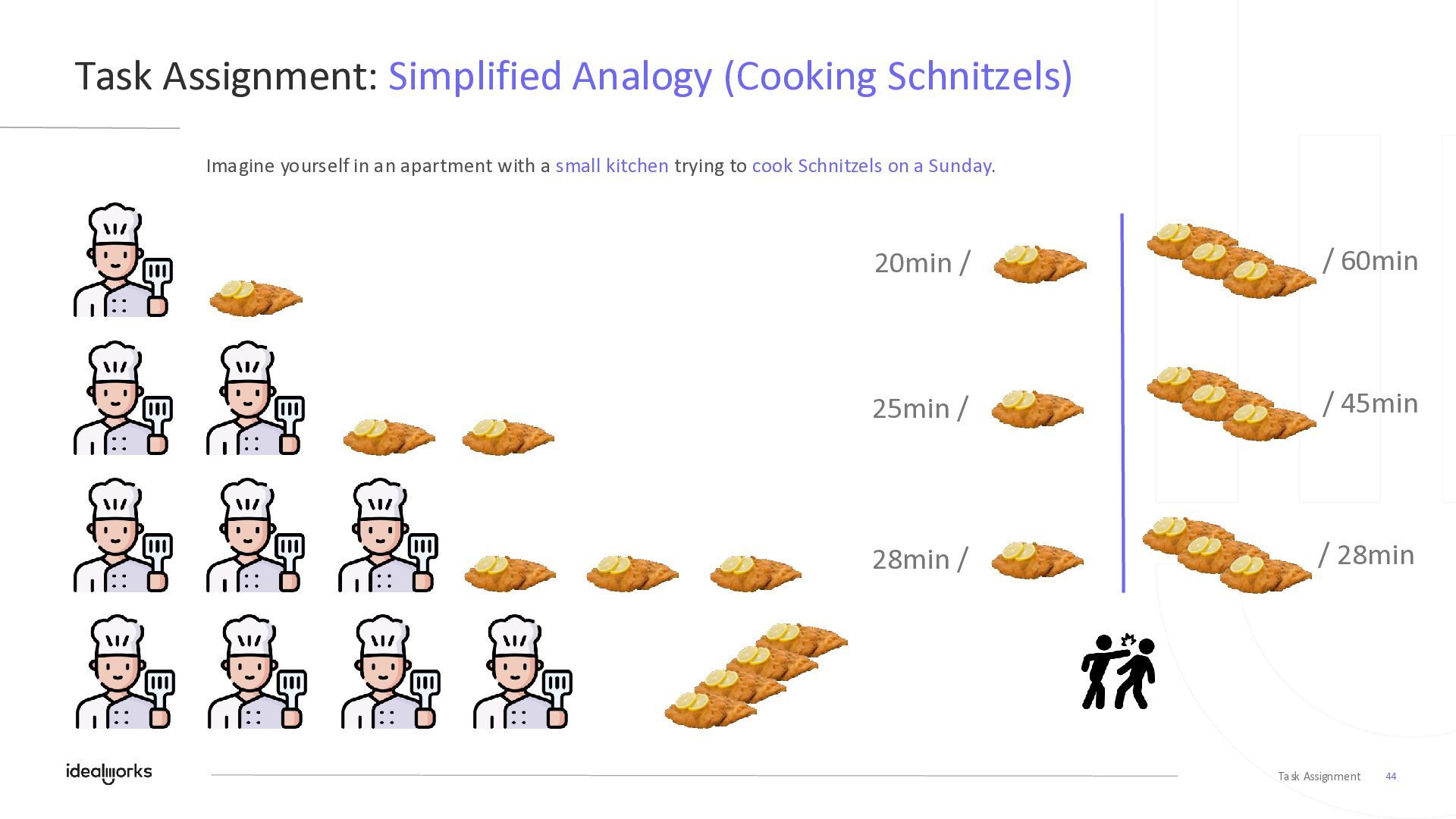
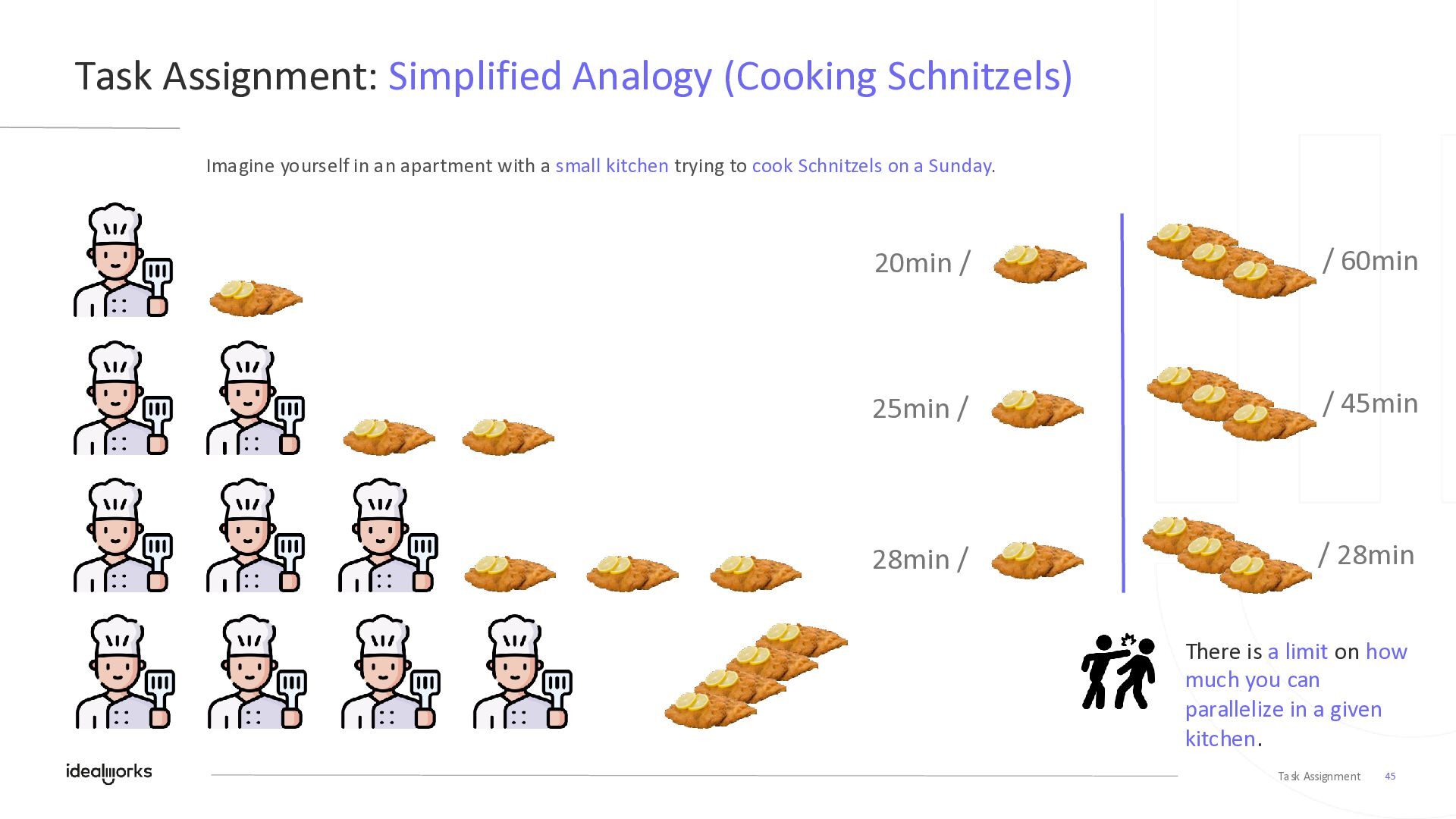
yourself in an apartment with a small kitchen trying to cook Schnitzels on a Sunday. 20min / / 60min 25min / 28min / / 45min / 28min There is a limit on how much you can parallelize in a given kitchen.
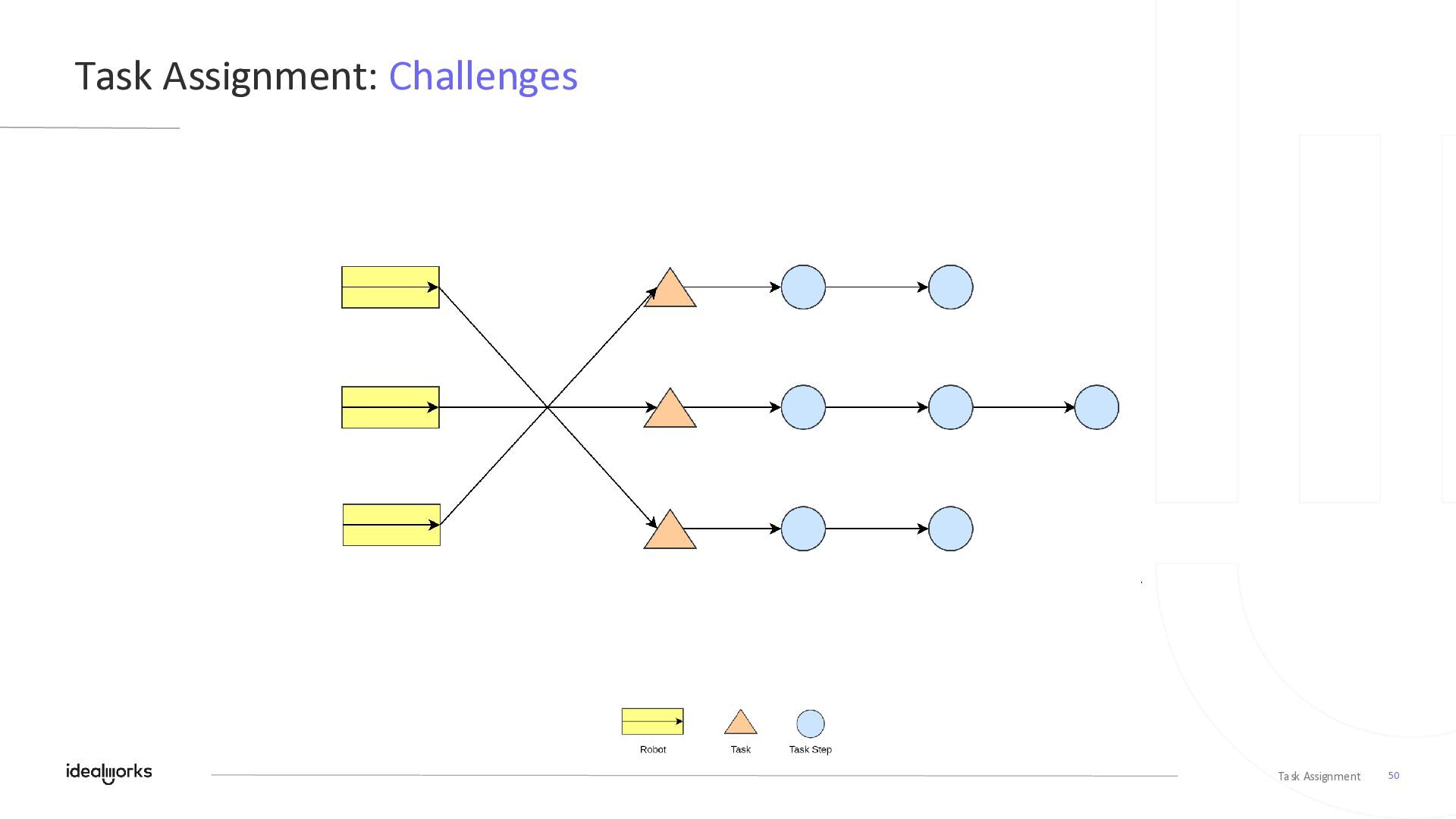
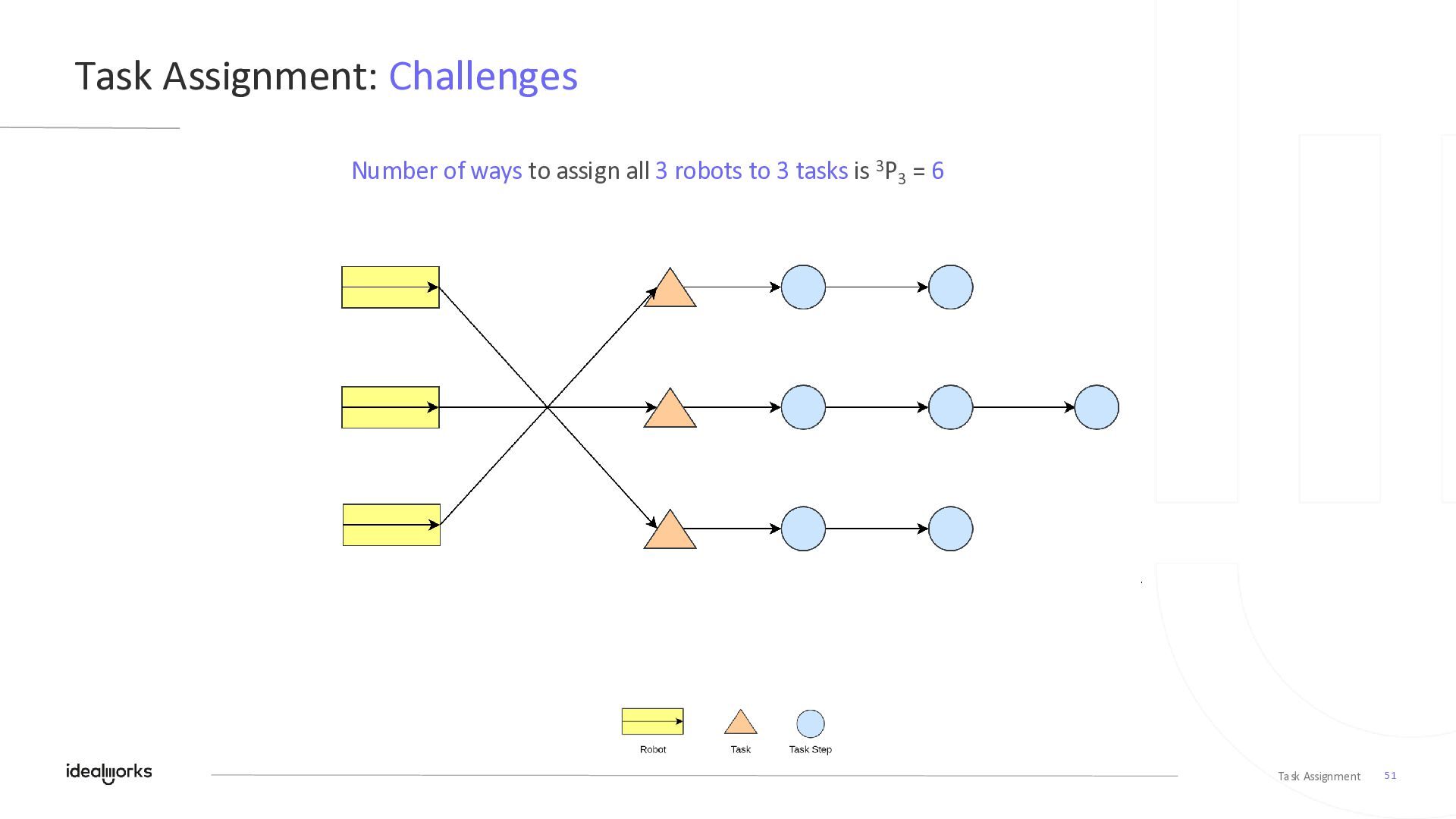
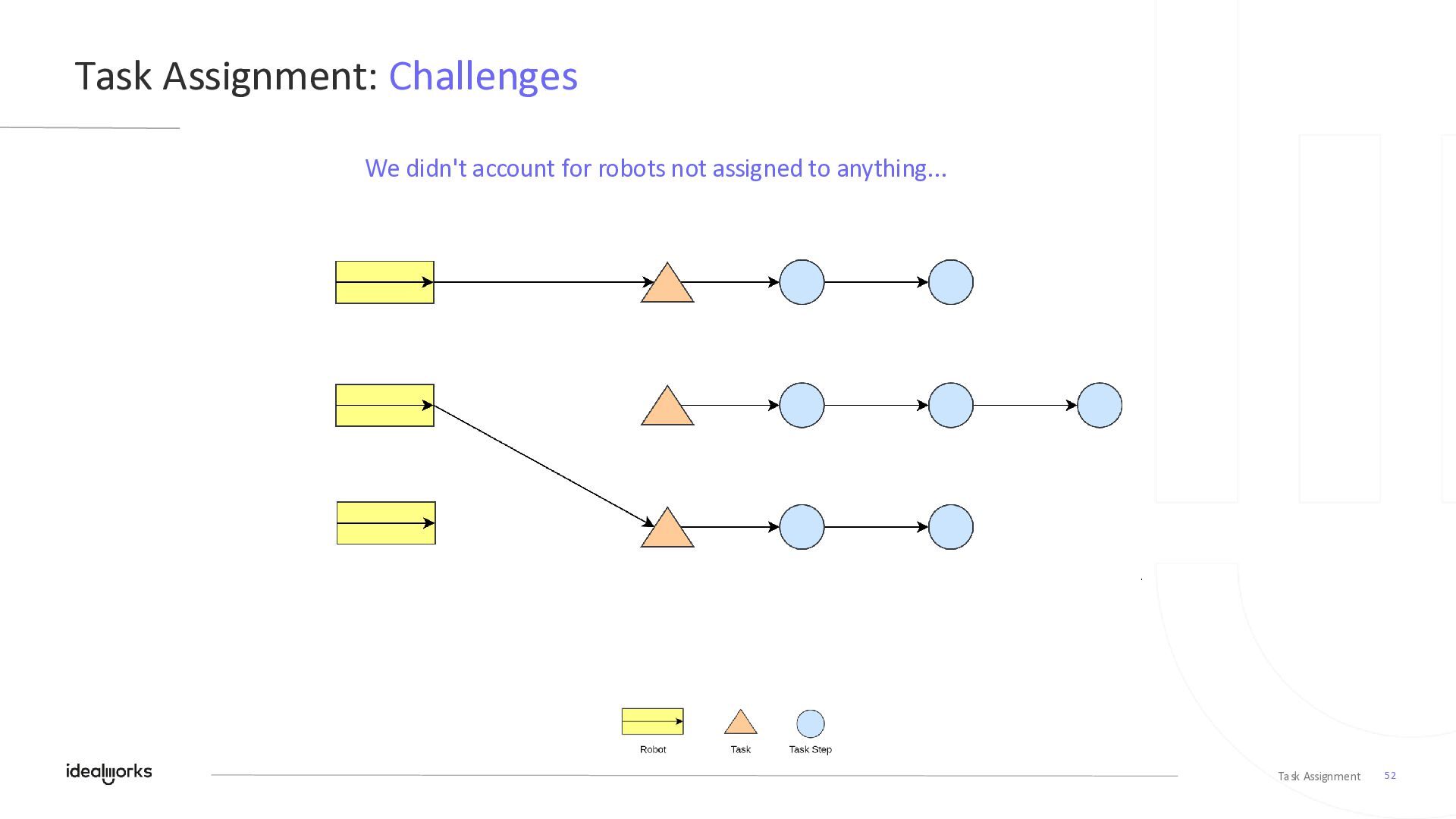
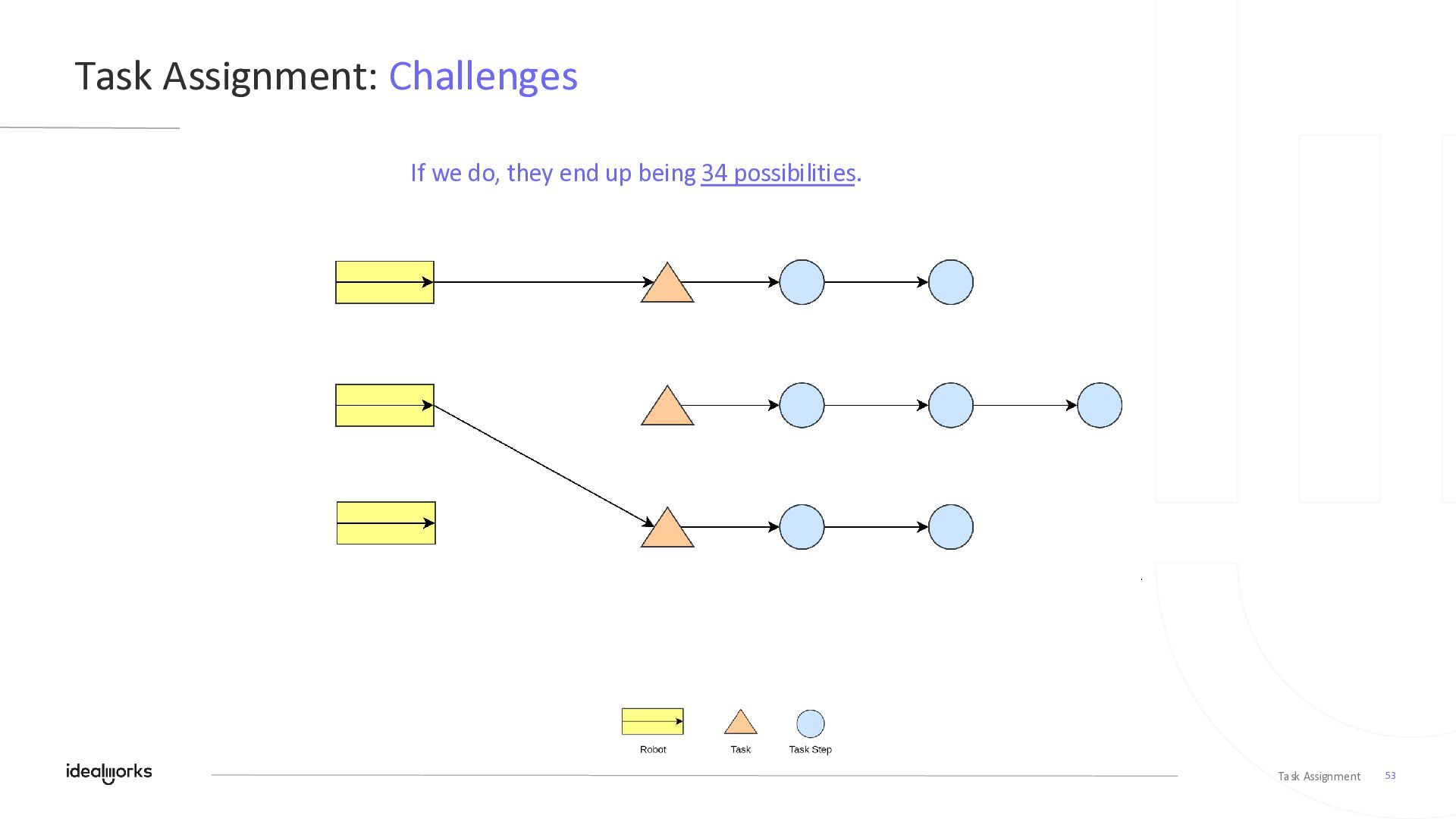
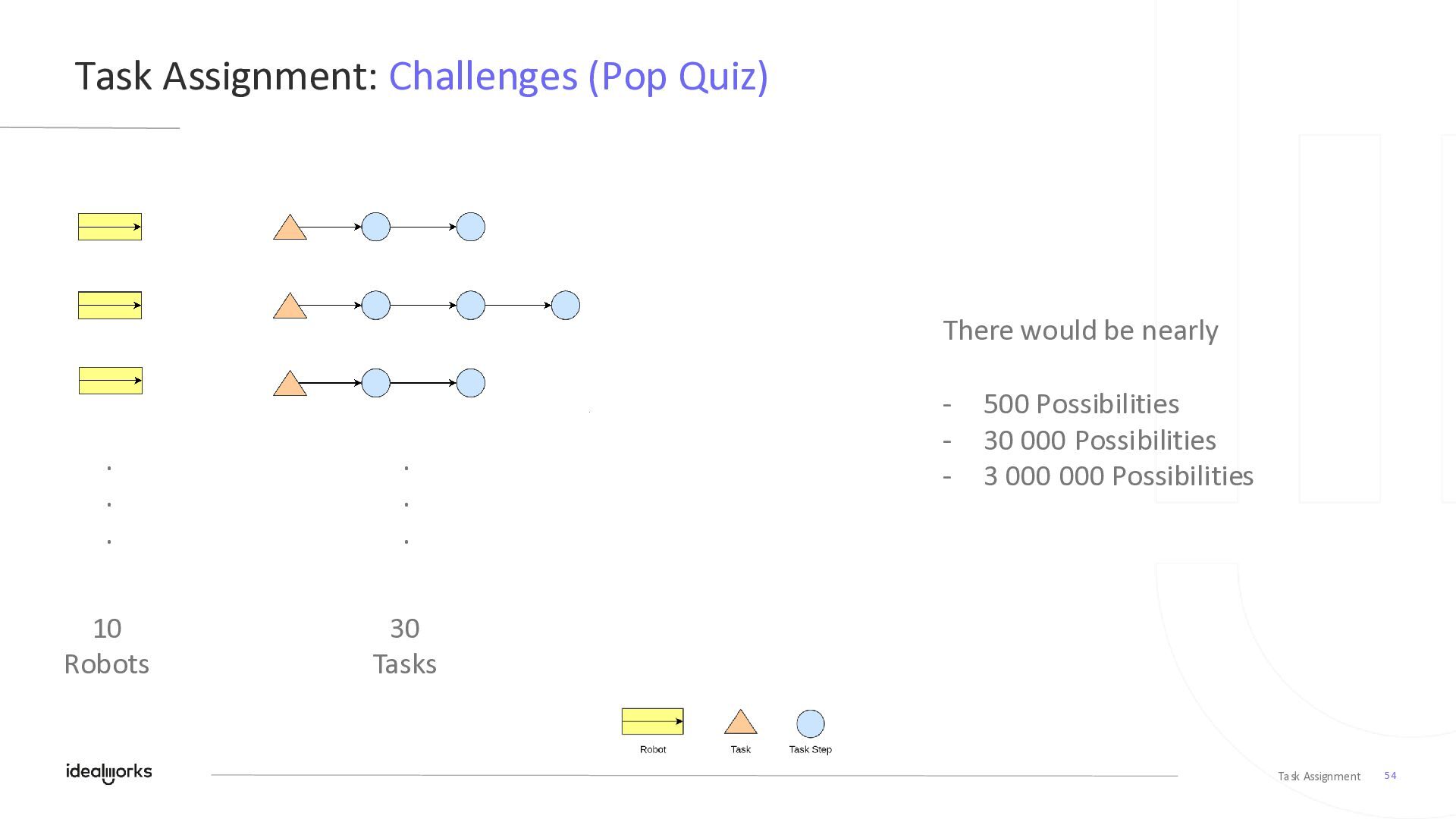
Know what can and what should be parallelized given the current circumstances. 2. Take into consideration all the "shared tools" to parallelize efficiently. 3. Understand the limits of your current environment. In the Warehouse [Same as above +] 1. Solving the problem should be very fast, otherwise the factory state would have changed by the time you want to execute your solution. 2. Respect rules specific to given factories (e.g., no 2 close-by dollies should be assigned to robots simultaneously). 3. Possible combinations of assigning tasks to robots becomes exponentially bigger with more robots/tasks.
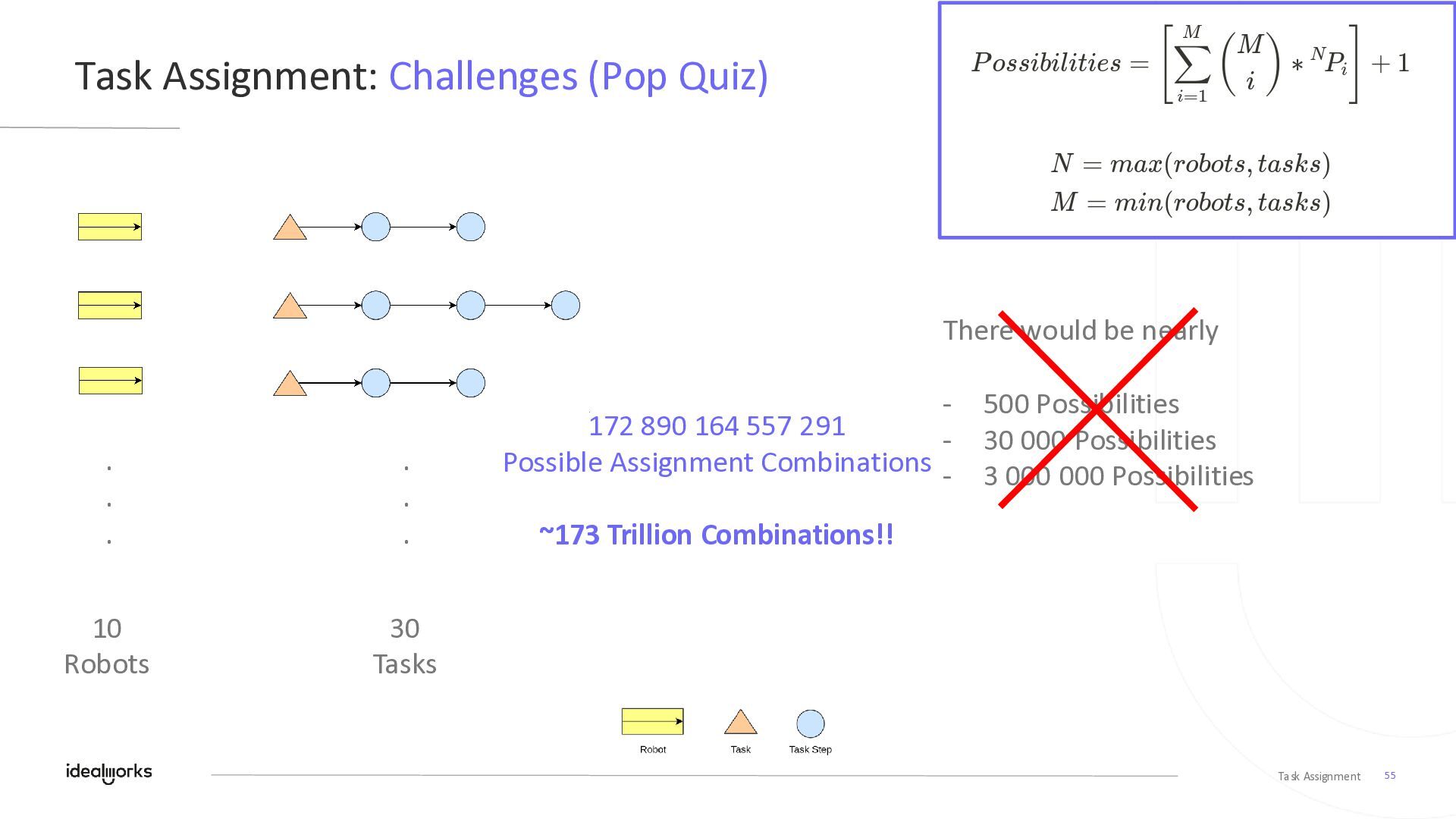
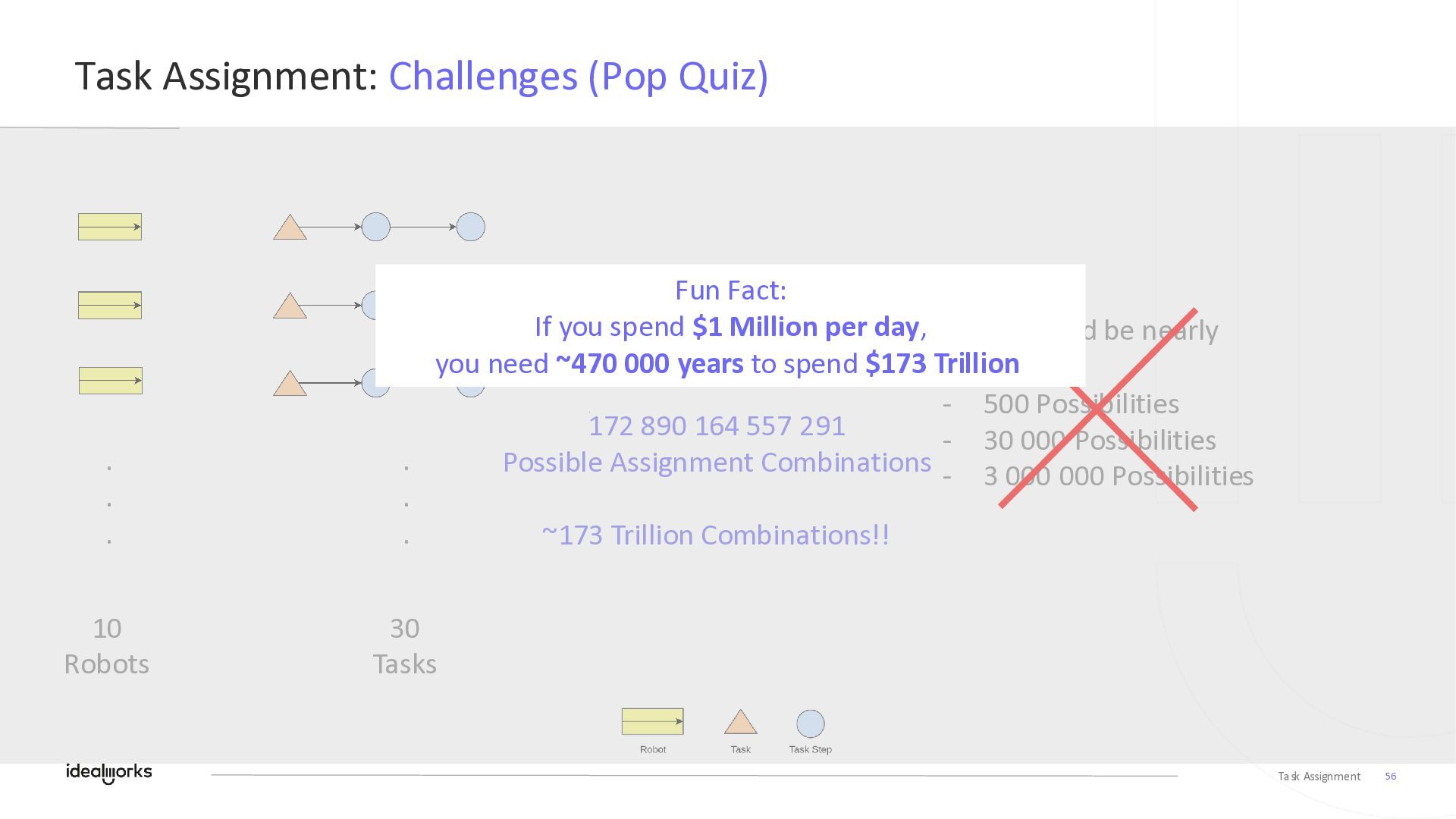
. . . . 10 Robots 30 Tasks There would be nearly - 500 Possibilities - 30 000 Possibilities - 3 000 000 Possibilities 172 890 164 557 291 Possible Assignment Combinations ~173 Trillion Combinations!! Fun Fact: If you spend $1 Million per day, you need ~470 000 years to spend $173 Trillion
the previously mentioned challenges, and even bigger scales. 2. We respect different custom rules per customer. 3. Optimize Overall Distance Travelled by all robots. 4. We support multi-fleet multi-robot-types during the same assignment request. 5. Schedule tasks in advance for a specific robot about to finish a mission (The Uber-like feature). 6. and much more!
Task Assignment • For each triggered Task, assign a robot to accomplish it. • Track Tasks to figure out when they are completed. • Respect different rules per factory. Route Planning • For each robot, propose the best possible route to avoid congestions. • Track robot movements and factory state to update routes accordingly. • Support robots which can generate their own route (AMRs) as well as those which can't (AGVs). Charging Strategy • Sustain a high throughput of accomplishing missions by charging robots just when necessary. • Execute a charging strategy which extends the robot's battery lifetime. • Charge robots in preparation for expected high throughput.
by internet connection, not stable everywhere throughout the factory. 2. Execution Delays caused by different types of robots having different reaction times. 3. Unexpected Slowdown caused by traffic. 4. Roadblocks which requires a new path to be planned. 5. Chaotic Peak hours where all your predictions won't work. 6. Heterogeneous fleets (Older AGV fleet with new AMR fleet in same location).
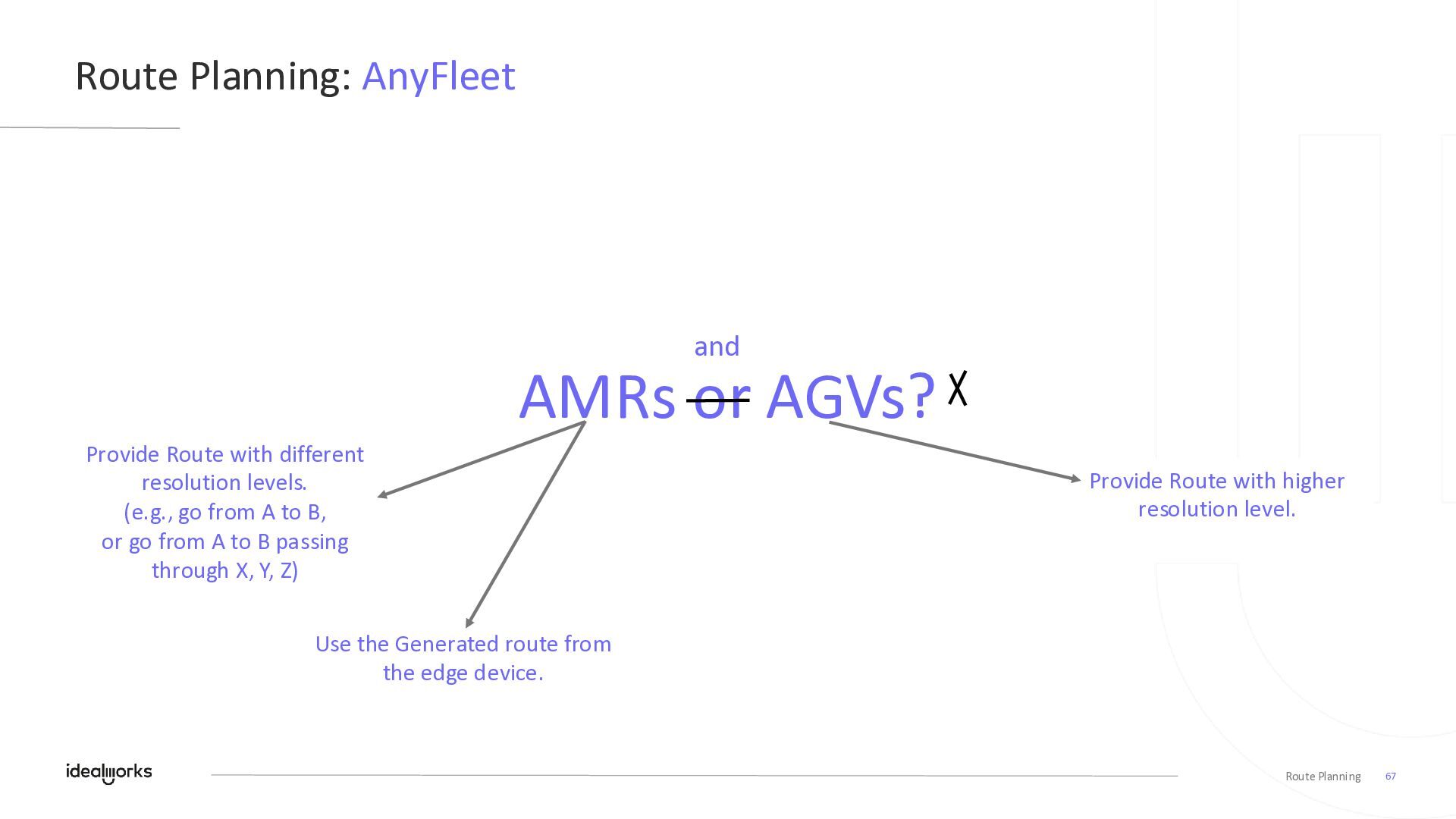
Provide Route with different resolution levels. (e.g., go from A to B, or go from A to B passing through X, Y, Z) Use the Generated route from the edge device. Provide Route with higher resolution level.
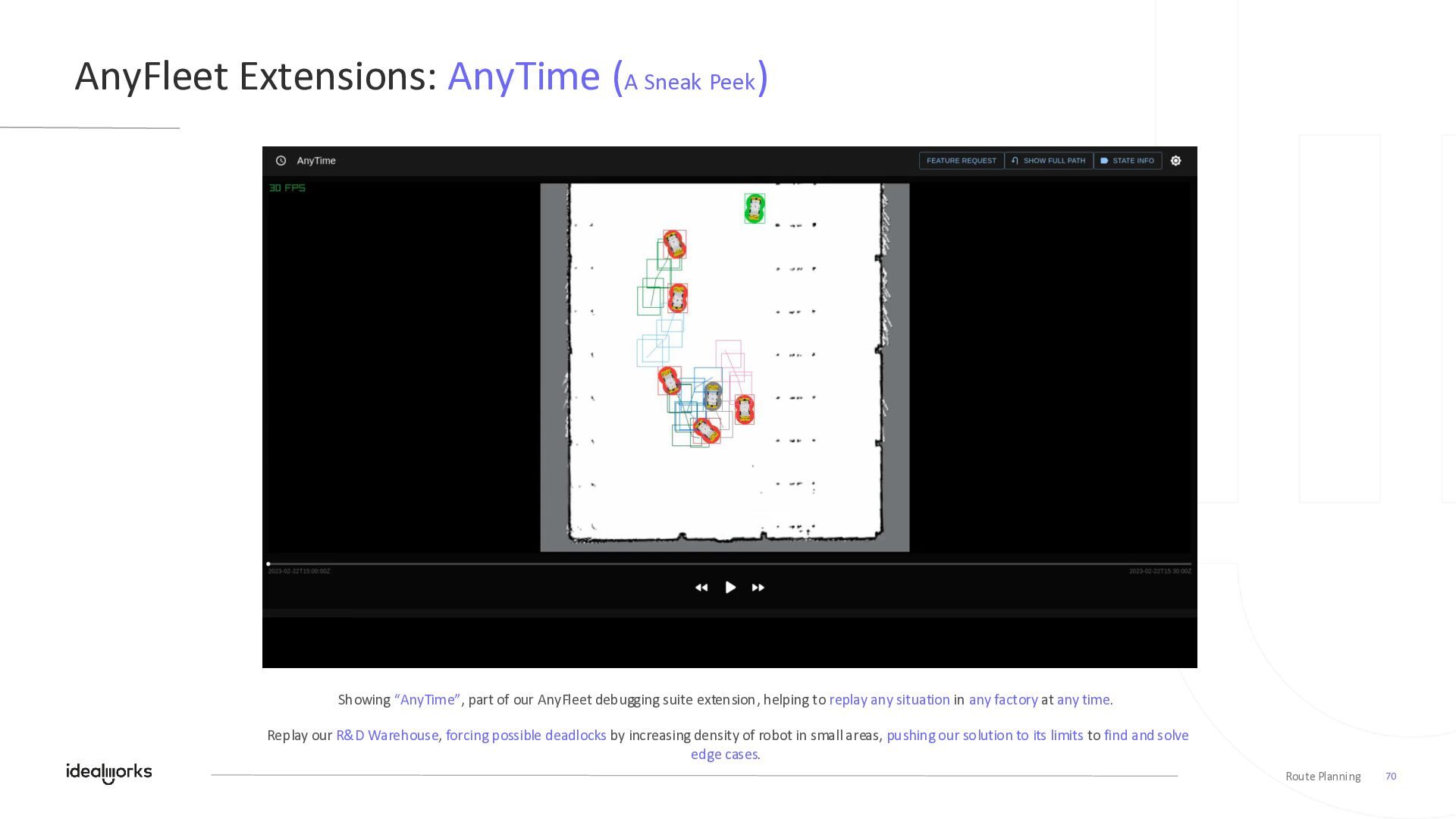
Showing “AnyTime”, part of our AnyFleet debugging suite extension, helping to replay any situation in any factory at any time. Replay our R&D Warehouse, forcing possible deadlocks by increasing density of robot in small areas, pushing our solution to its limits to find and solve edge cases.
Task Assignment • For each triggered Task, assign a robot to accomplish it. • Track Tasks to figure out when they are completed. • Respect different rules per factory. Route Planning • For each robot, propose the best possible route to avoid congestions. • Track robot movements and factory state to update routes accordingly. • Support robots which can generate their own route (AMRs) as well as those which can't (AGVs). Charging Strategy • Sustain a high throughput of accomplishing missions by charging robots just when necessary. • Execute a charging strategy which extends the robot's battery lifetime. • Charge robots in preparation for expected high throughput.
have a team of 5 people in a call-center. You want them to be available 24/7. 1. Everyone starts at 6AM, stays awake until 11PM. What happens with the 11PM till 6AM shift? 2. You have 2 shifts, 3 people for the morning part, 2 for the night shift. Night shift people are always stuck in the night shift. 3. Alternate the sleeping schedules over the week to give each person the chance to be in either shifts. Works well for robots [adds redundancy], may mess up humans' sleep schedule.
have a team of 5 people in a call-center. You want them to be available 24/7. 1. Everyone starts at 6AM, stays awake until 11PM. What happens with the 11PM till 6AM shift? 2. You have 2 shifts, 3 people for the morning part, 2 for the night shift. Night shift people are always stuck in the night shift. 3. Alternate the sleeping schedules over the week to give each person the chance to be in either shifts. Works well for robots [adds redundancy], may mess up humans' sleep schedule.
have a team of 5 people in a call-center. You want them to be available 24/7. 1. Everyone starts at 6AM, stays awake until 11PM. What happens with the 11PM till 6AM shift? 2. You have 2 shifts, 3 people for the morning part, 2 for the night shift. Night shift people are always stuck in the night shift. 3. Alternate the sleeping schedules over the week to give each person the chance to be in either shifts. Works well for robots [adds redundancy], may mess up humans' sleep schedule.
between availability and charge level? 2. What should we do if a sudden peak of tasks happens? 3. How can we ensure that we don't damage the battery with bad charging patterns? 4. How can we place chargers in the factory for a more efficient workflow?
Robot Type. 2. Integrates with Task Assignment Strategy. 3. Ensure maximum availability given number of robots. 4. Efficient charger placement as part of Use Case Setup. 5. and more!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Industrial Robot Fleet Management System [Simply] Fleet Manager [Simply] 23](https://files.speakerdeck.com/presentations/5976d3b4a6024acea121950621bbc308/slide_22.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![Aren't Smarter Robots enough? Fleet Manager [Simply] 27 In Some](https://files.speakerdeck.com/presentations/5976d3b4a6024acea121950621bbc308/slide_26.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Industrial Robot Fleet Management System [Simply] Fleet Manager [Simply] 36](https://files.speakerdeck.com/presentations/5976d3b4a6024acea121950621bbc308/slide_35.jpg){kind=link}
![Industrial Robot Fleet Management System [Simply] Fleet Manager [Simply] 37](https://files.speakerdeck.com/presentations/5976d3b4a6024acea121950621bbc308/slide_36.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Industrial Robot Fleet Management System [Simply] Fleet Manager [Simply] 58](https://files.speakerdeck.com/presentations/5976d3b4a6024acea121950621bbc308/slide_57.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Industrial Robot Fleet Management System [Simply] Fleet Manager [Simply] 71](https://files.speakerdeck.com/presentations/5976d3b4a6024acea121950621bbc308/slide_70.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}