ICDE 2020 Keynote talk. Video online at https://www.youtube.com/watch?v=cRxa-PeUk6w
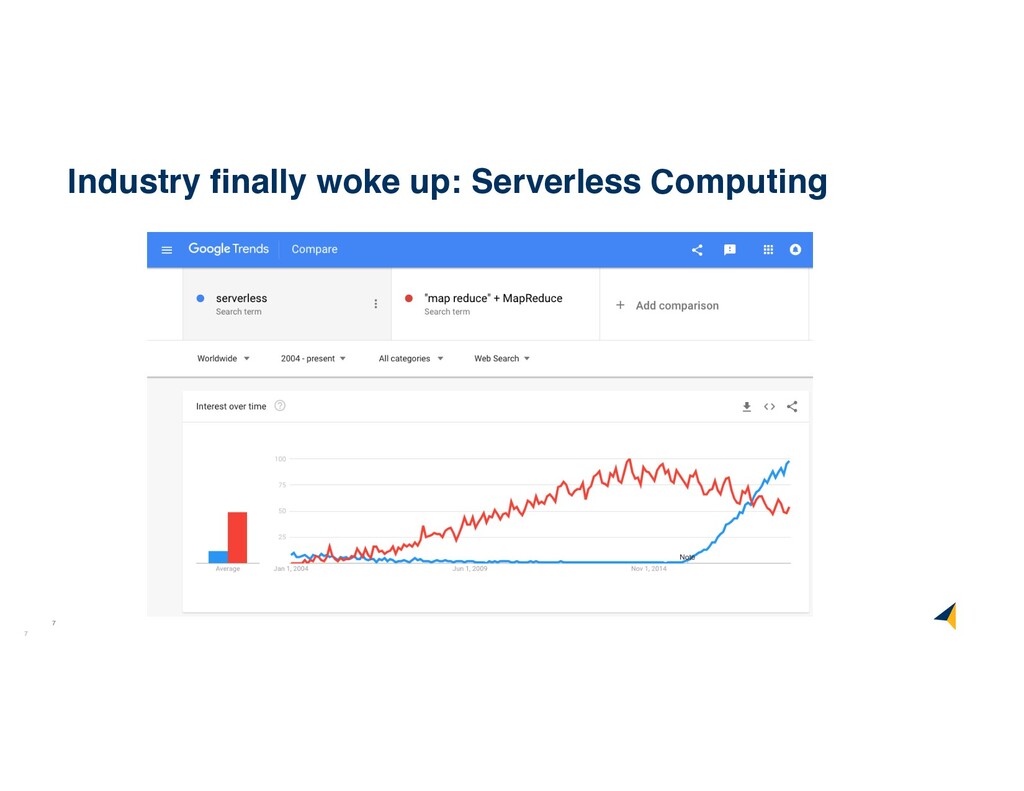
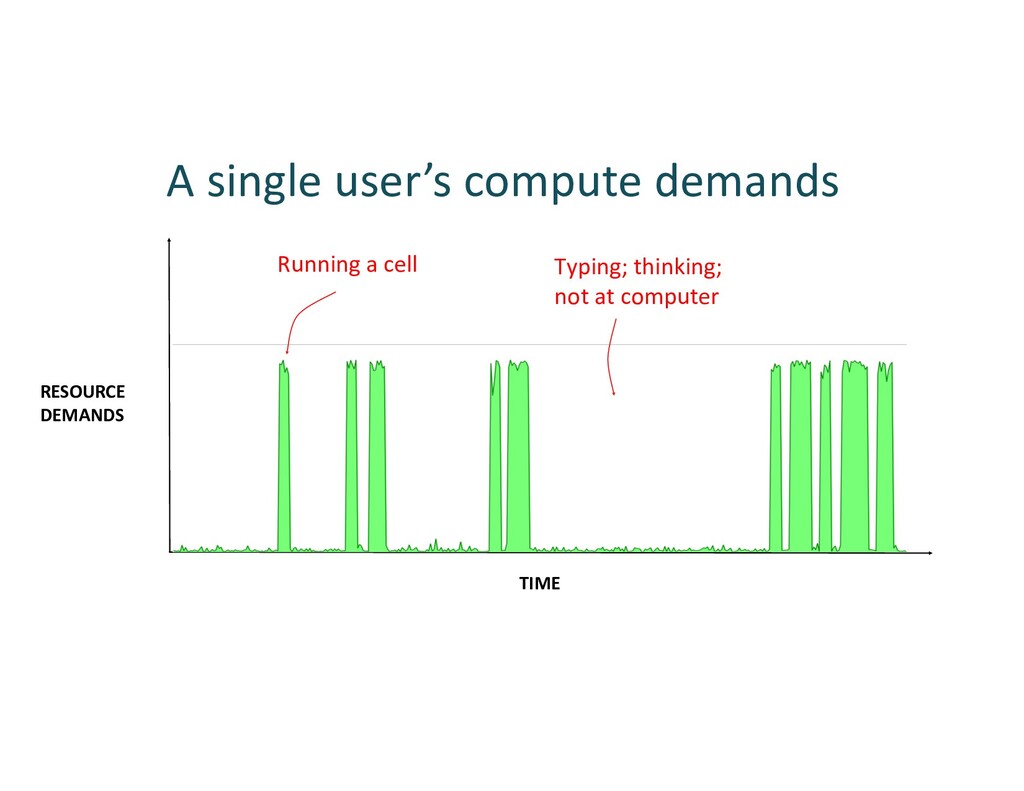
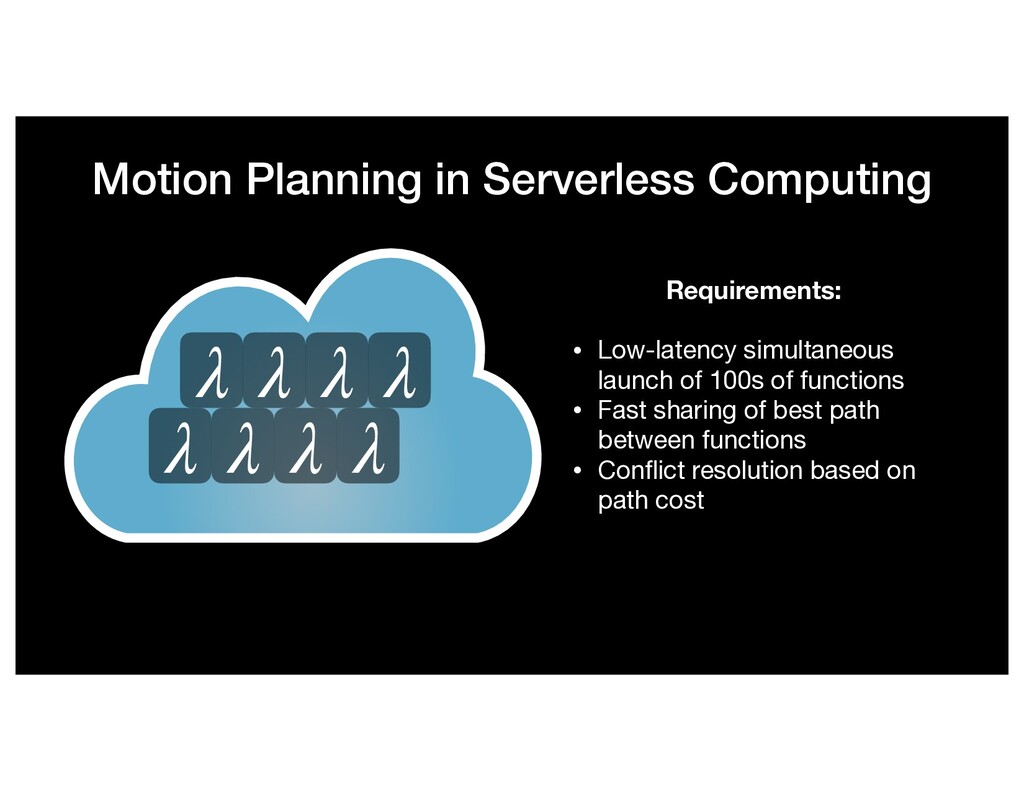
Major shifts in computing platforms are typically accompanied by new programming models. The public cloud emerged a decade ago, but we have yet to see a new generation of programming platforms arise in response. All the traditional challenges of distributed programming and data are present in the cloud, only they are now faced by the general population of software developers. Added to these challenges are new desires for "serverless" computing, including consumption-based pricing and autoscaling, which raise particular challenges for data-centric applications.
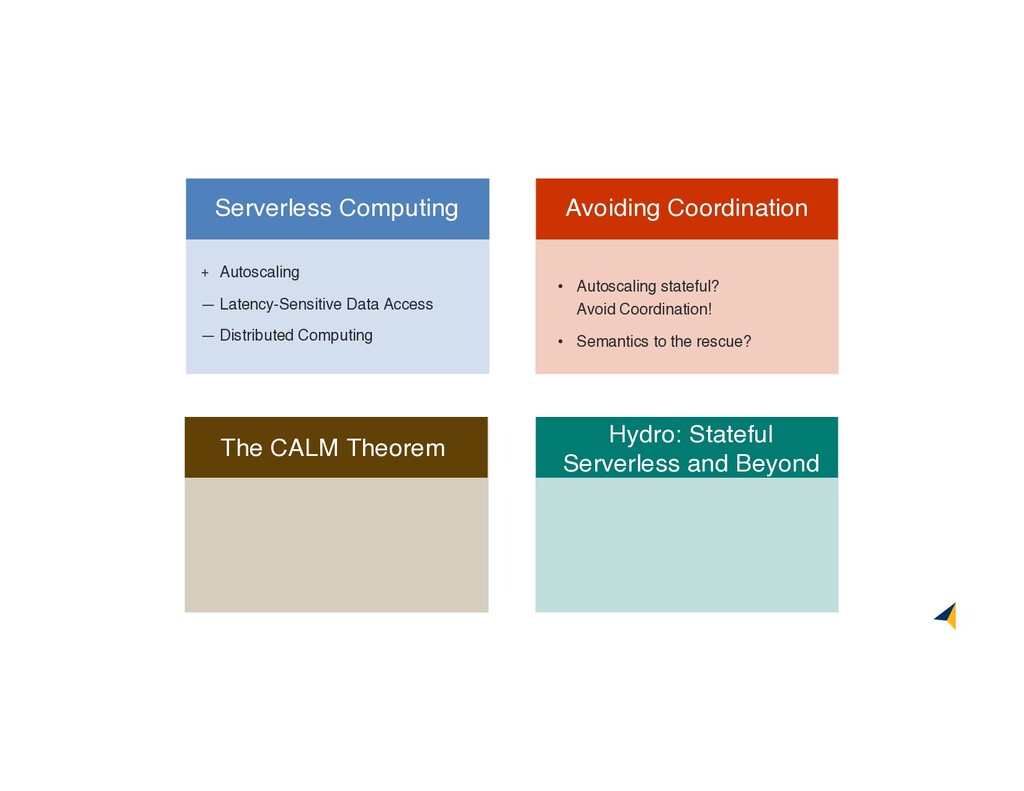
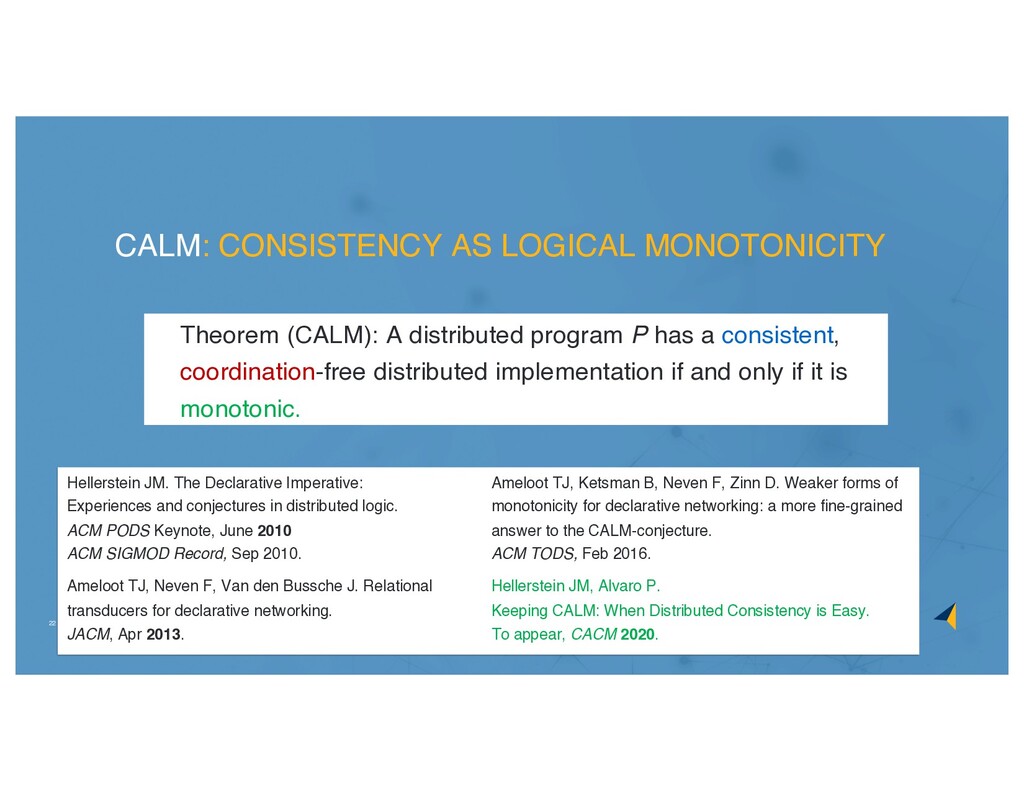
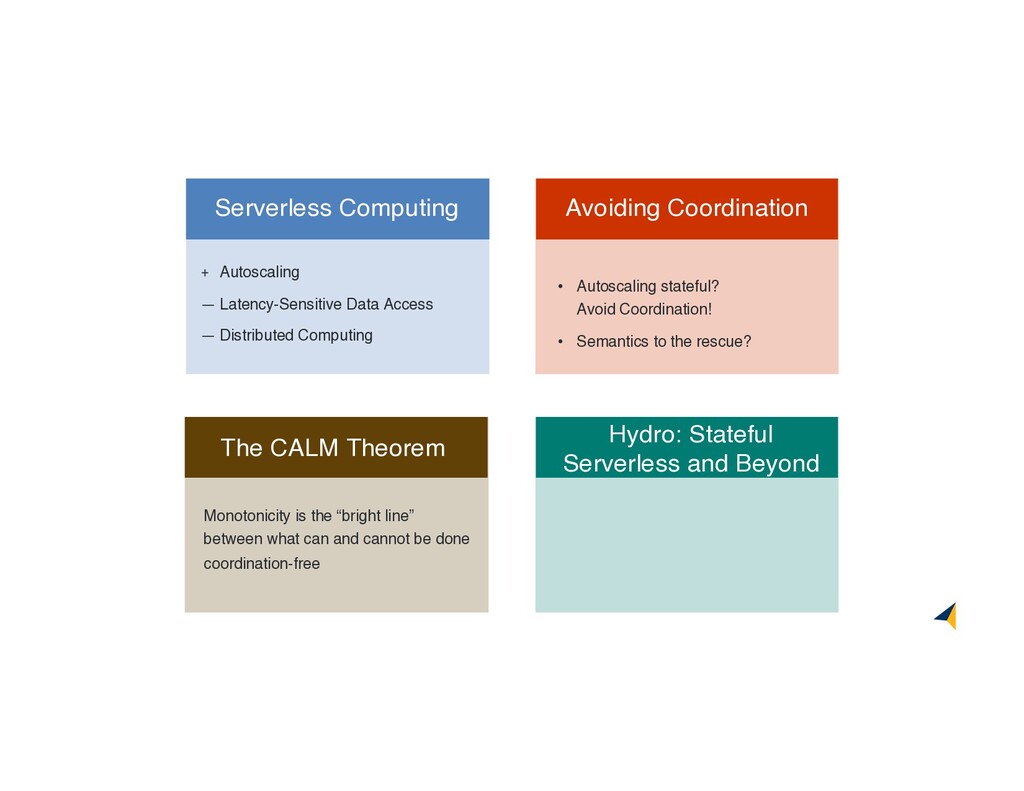
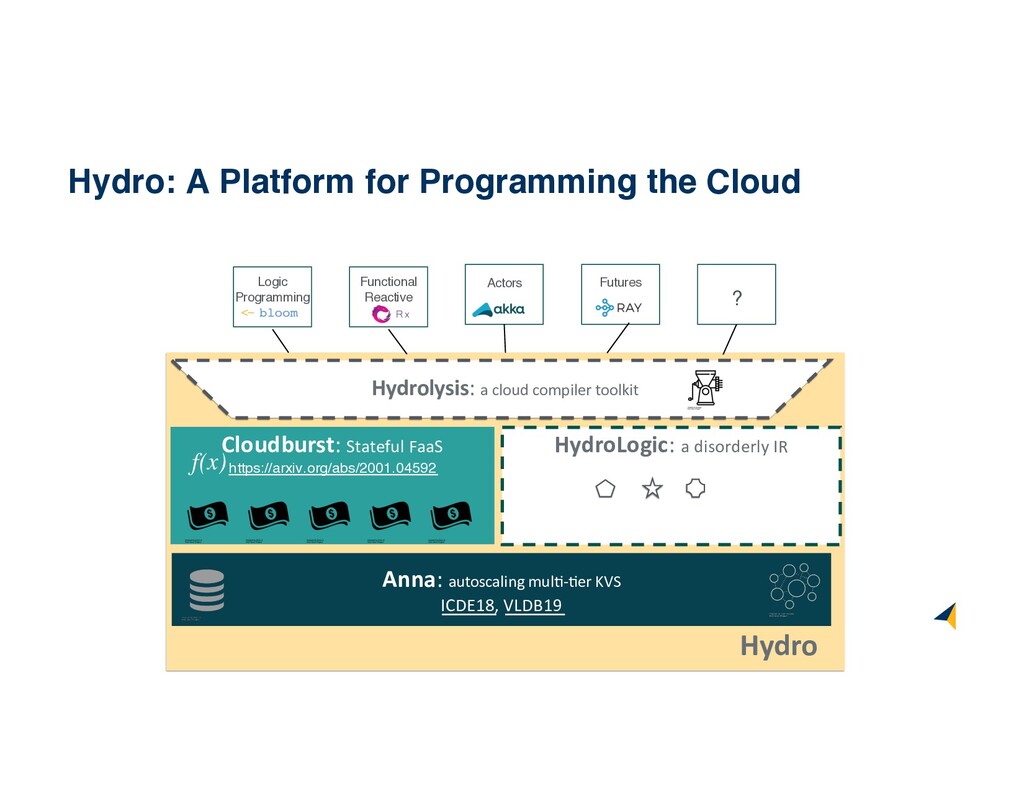
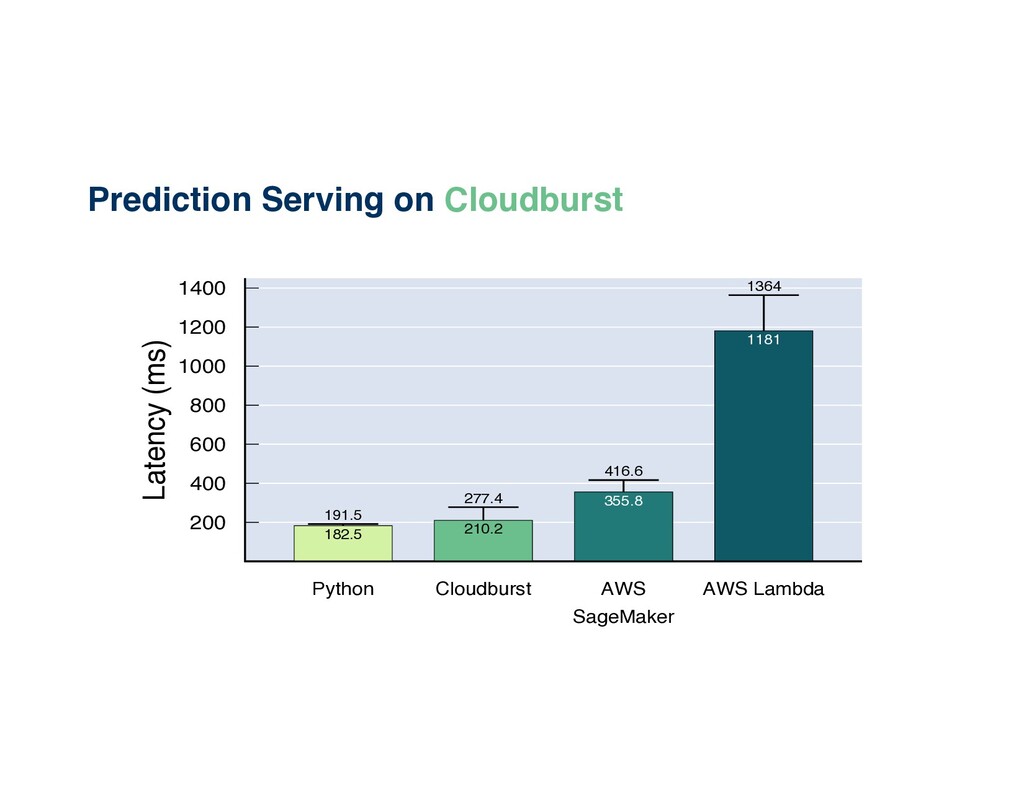
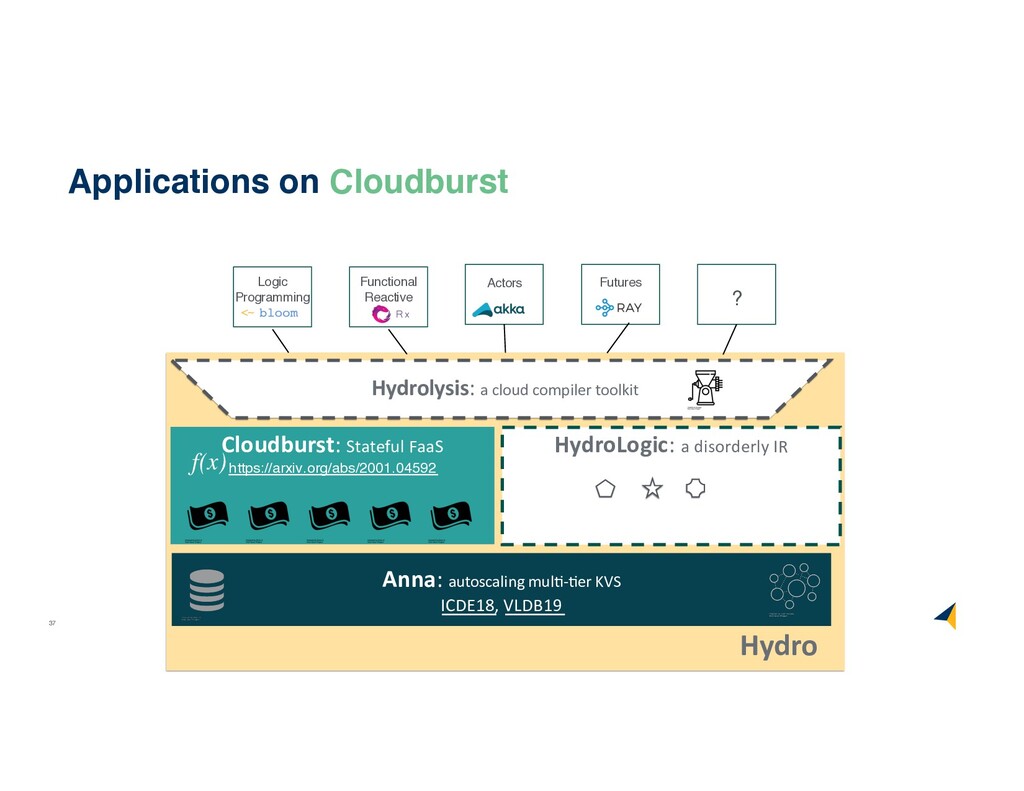
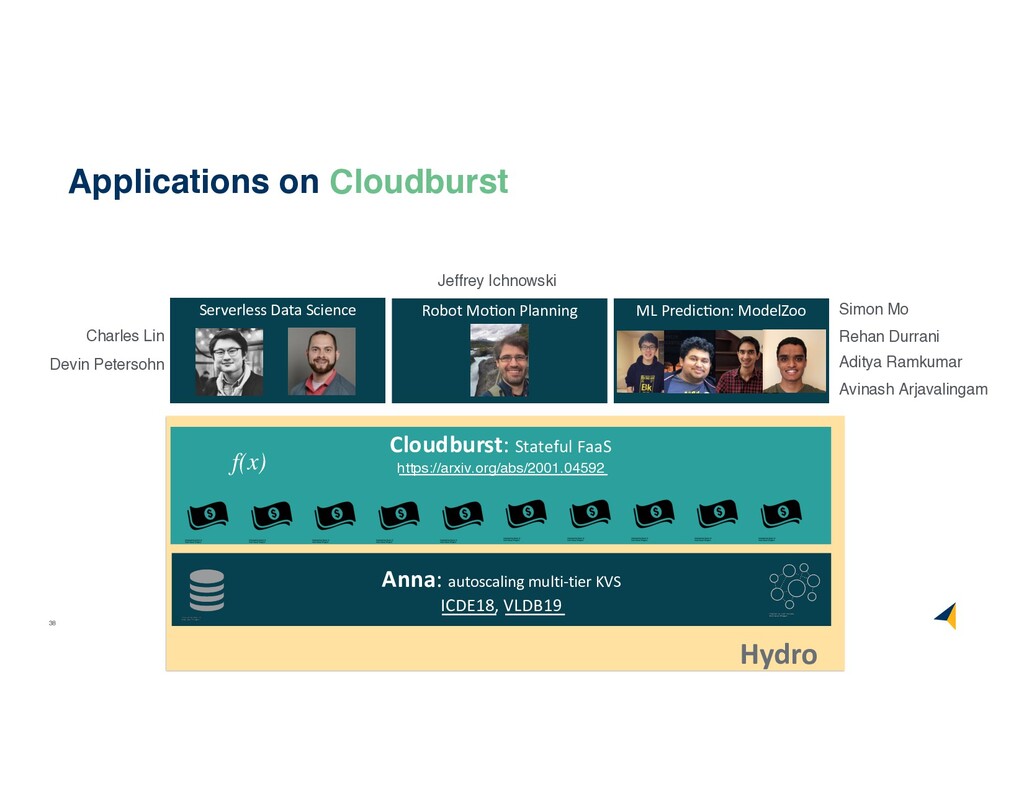
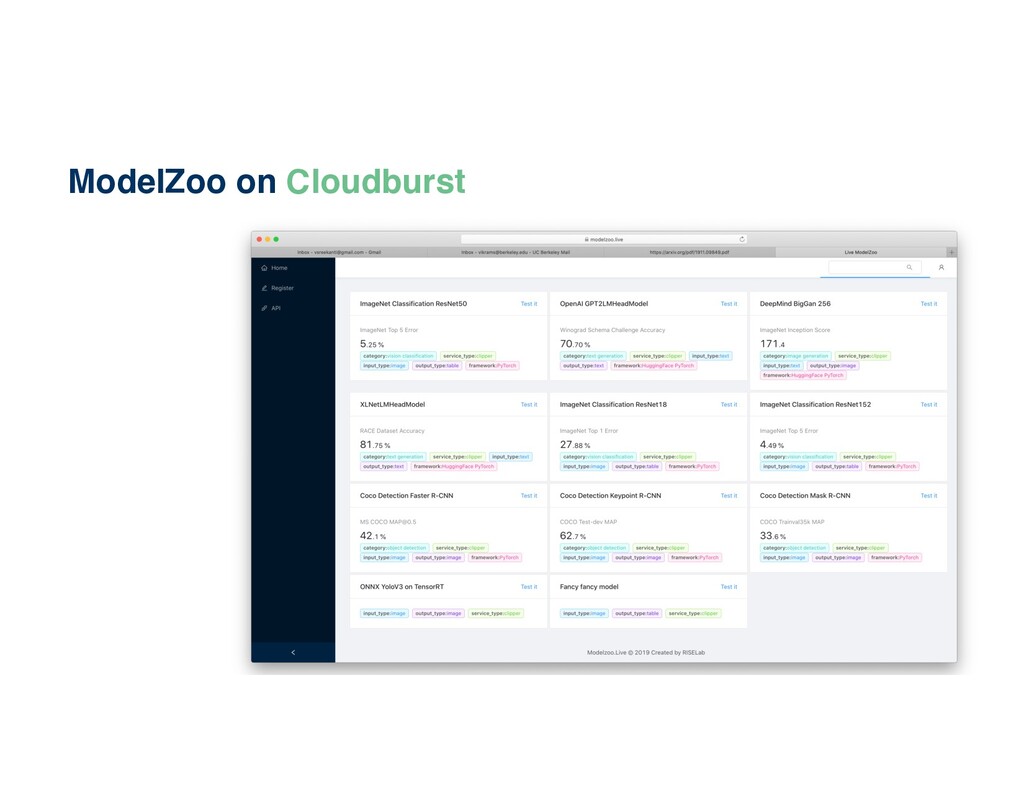
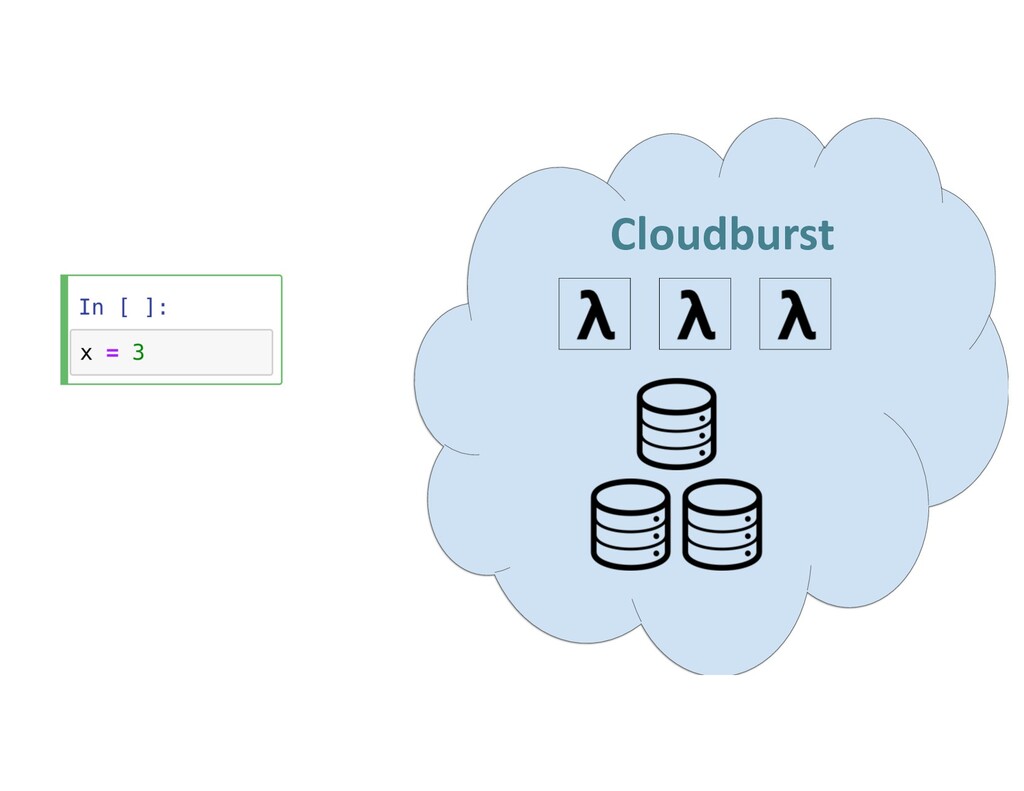
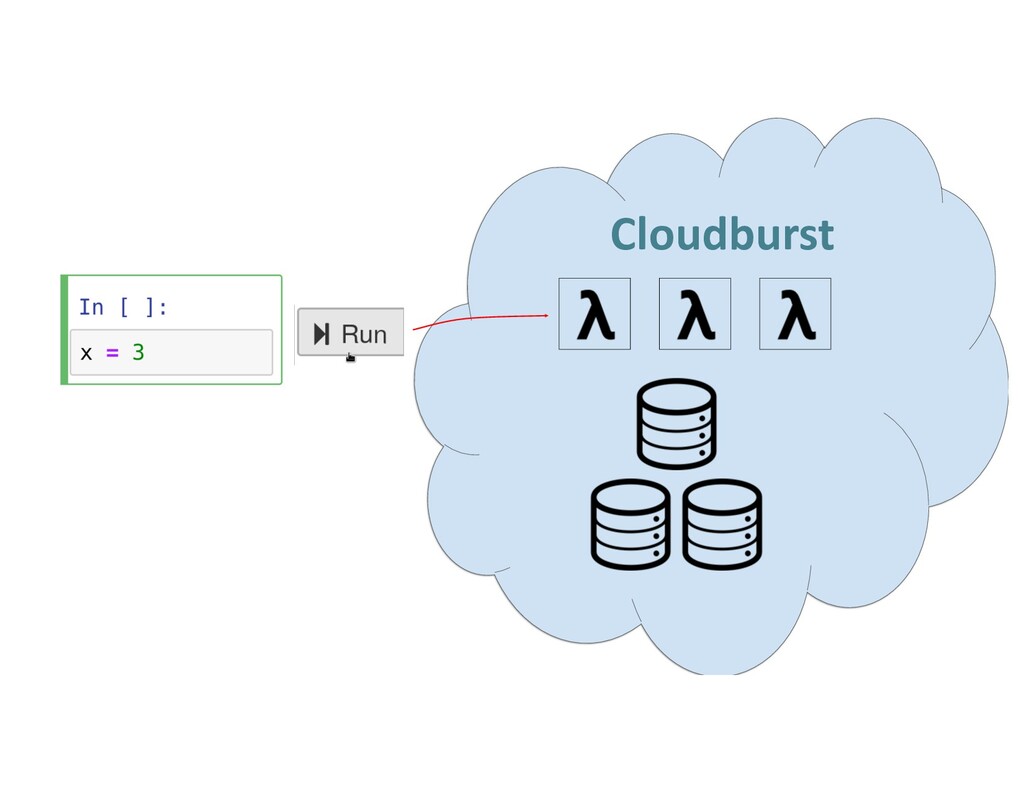
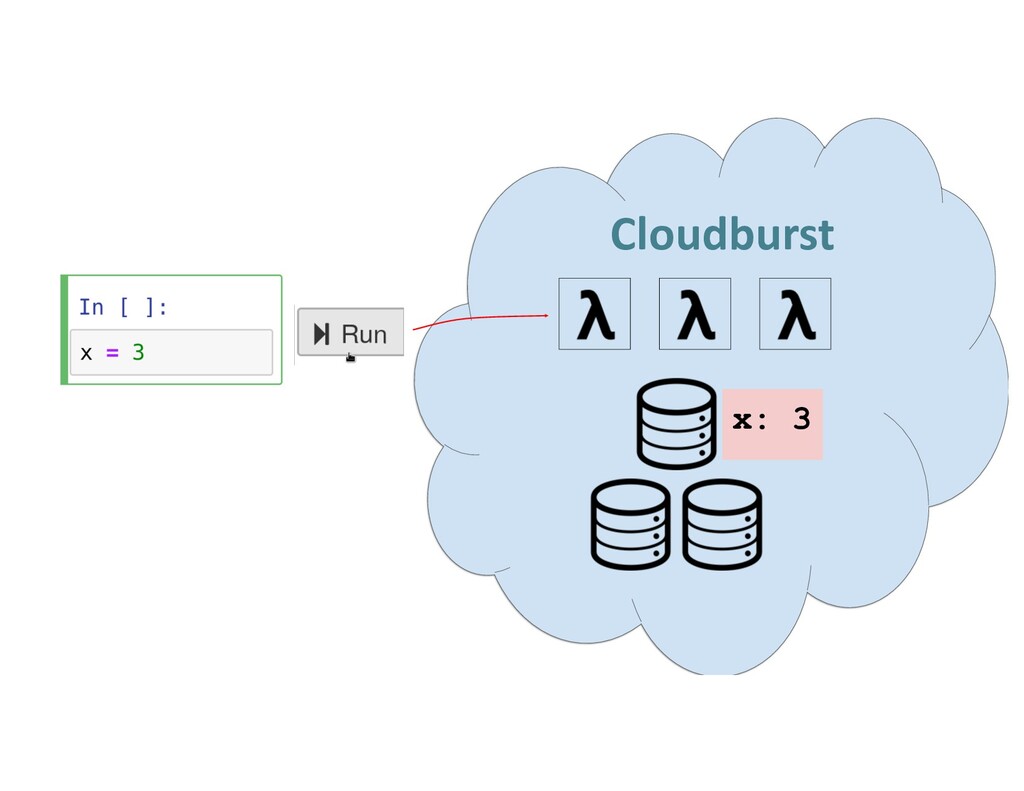
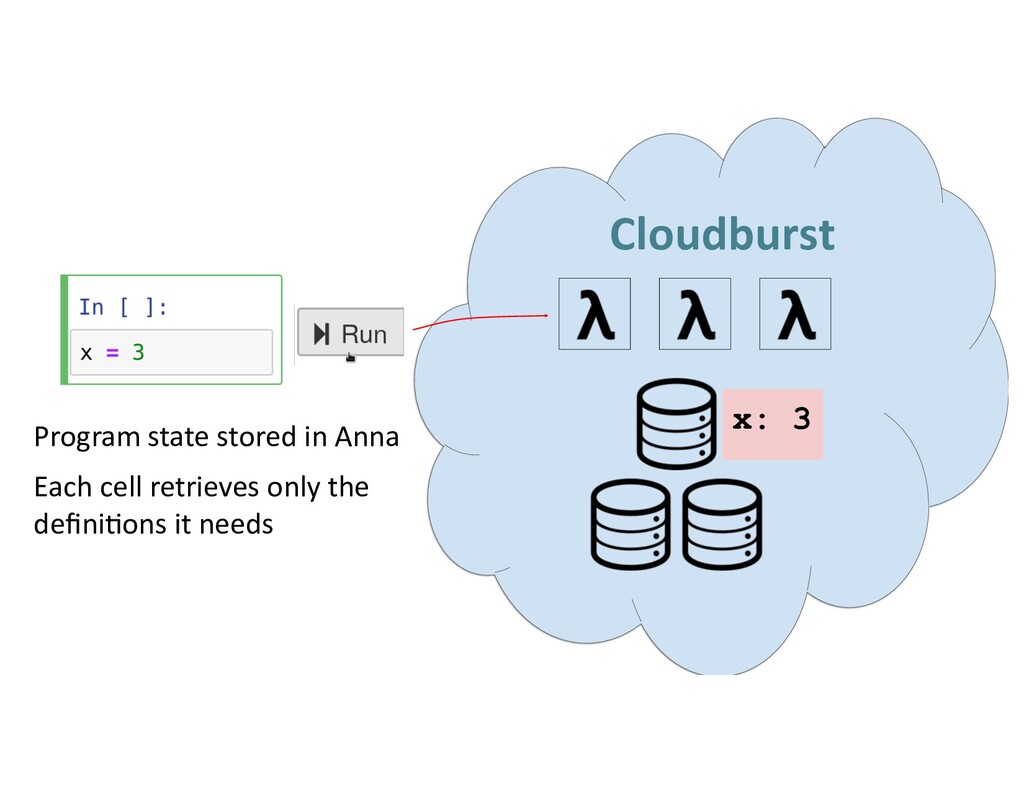
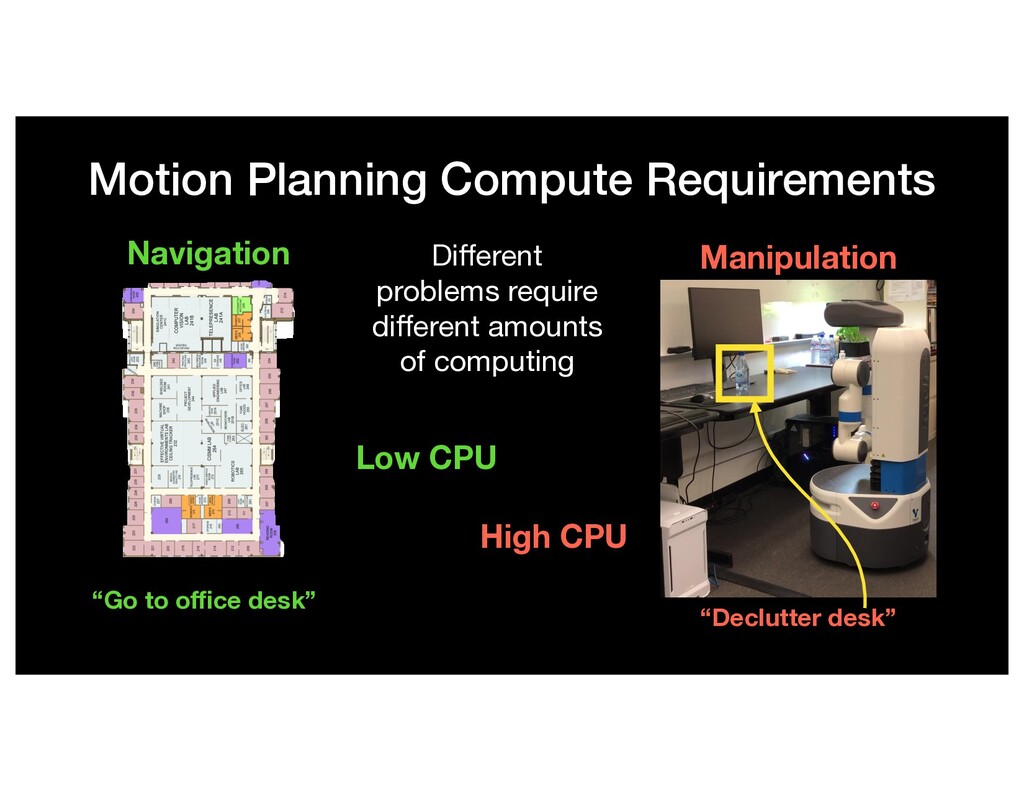
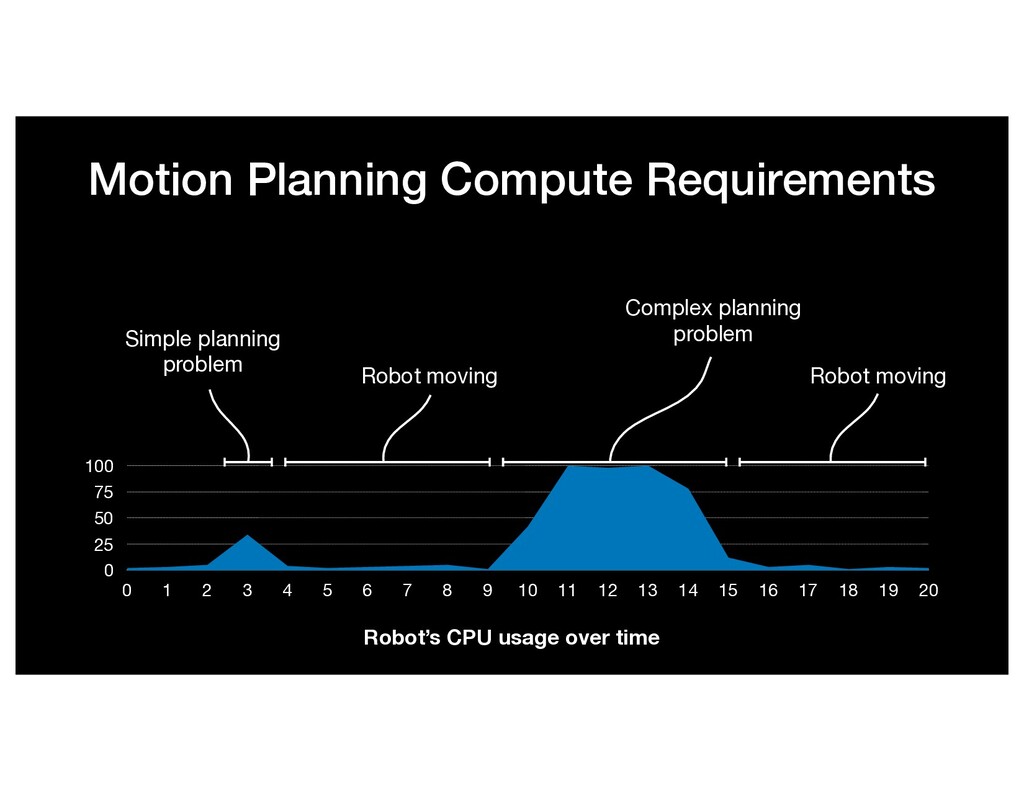
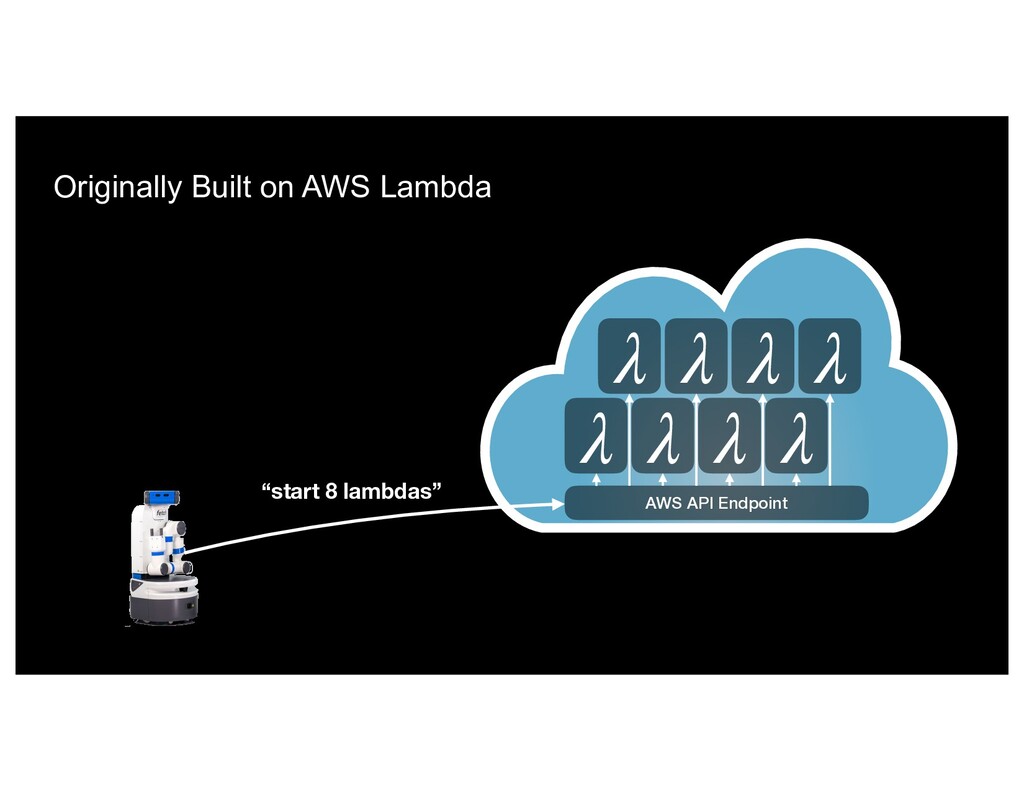
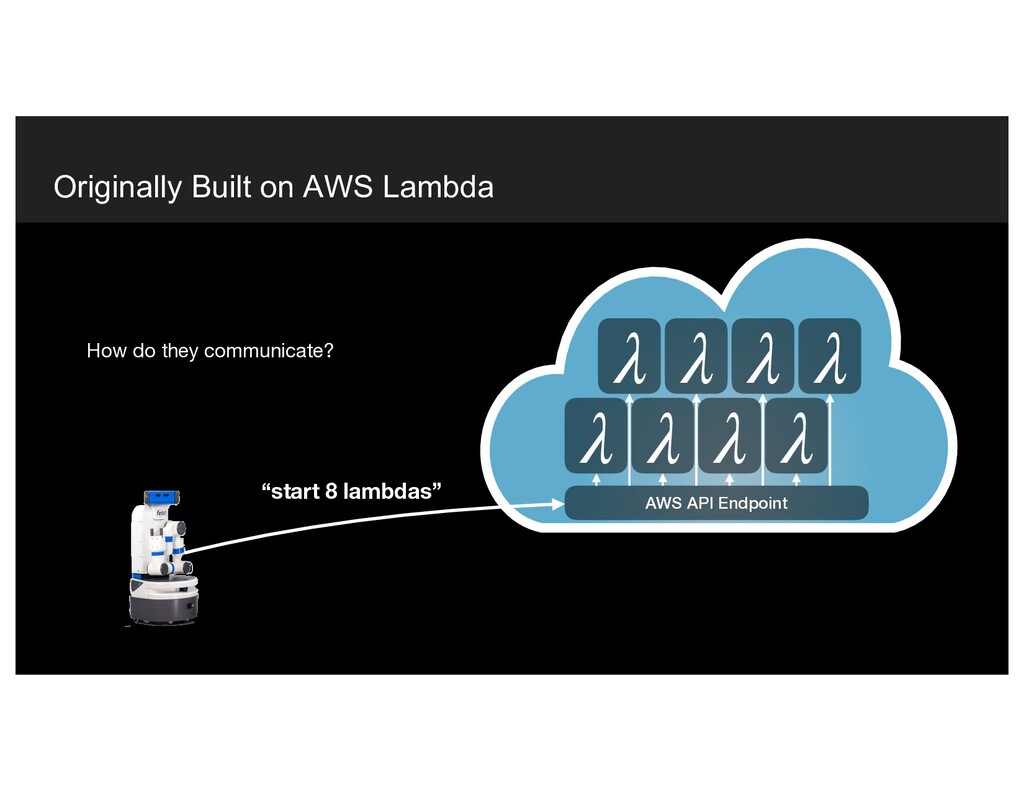
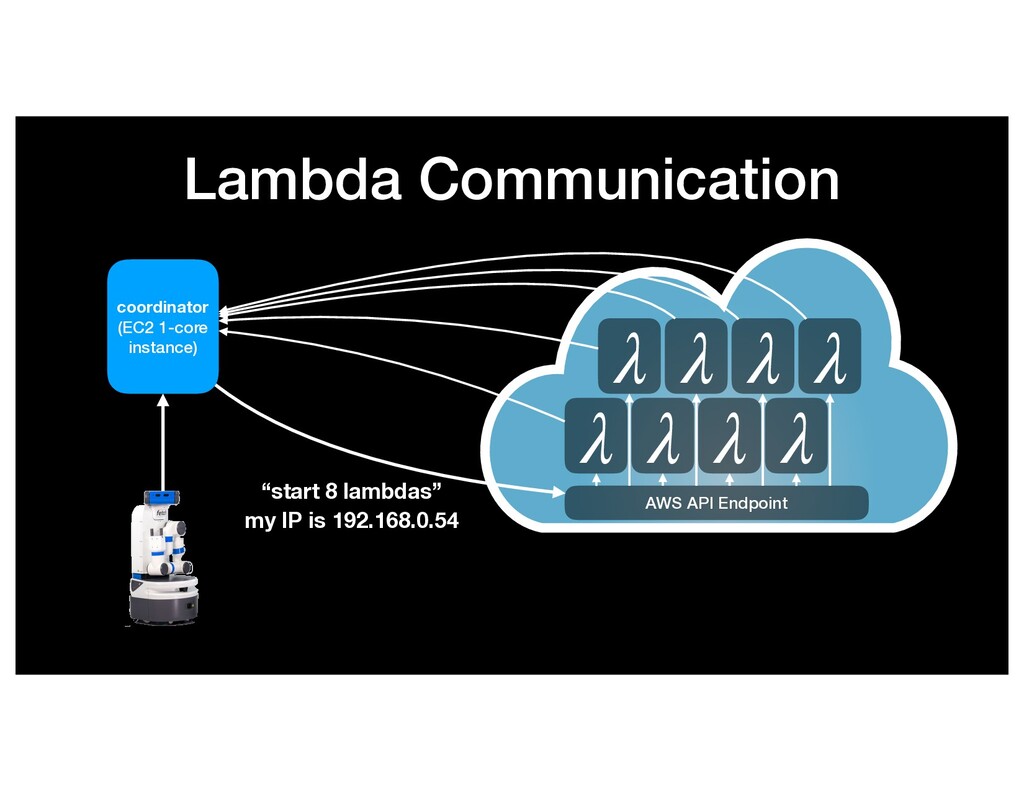
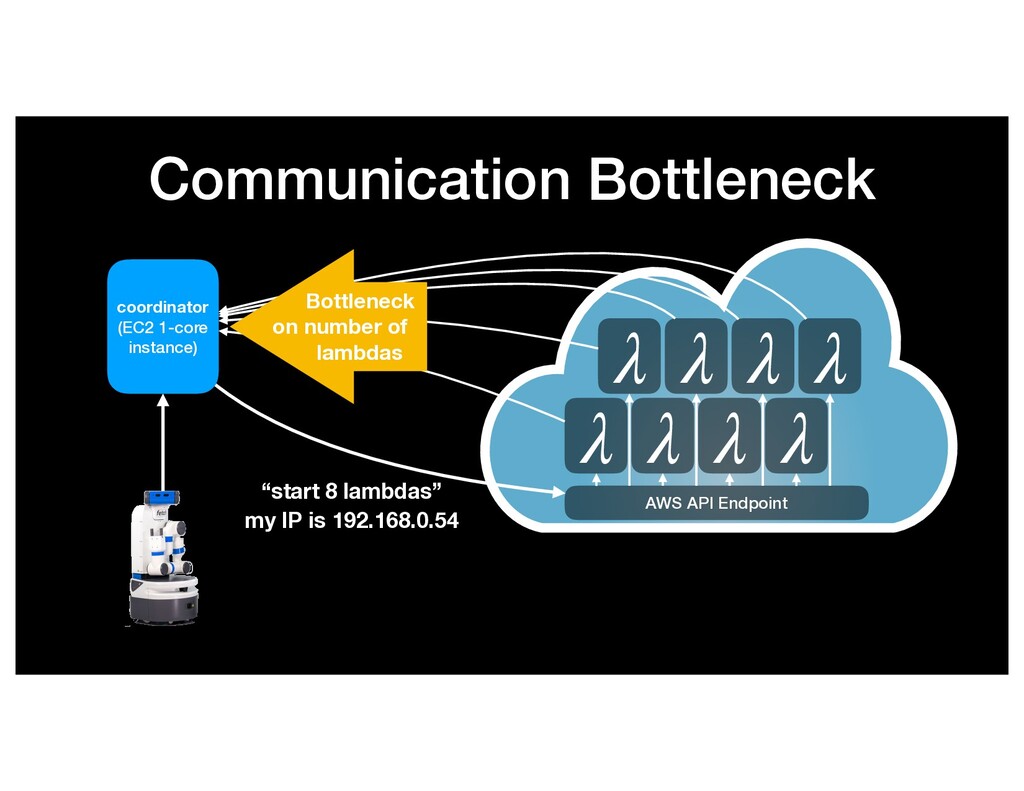
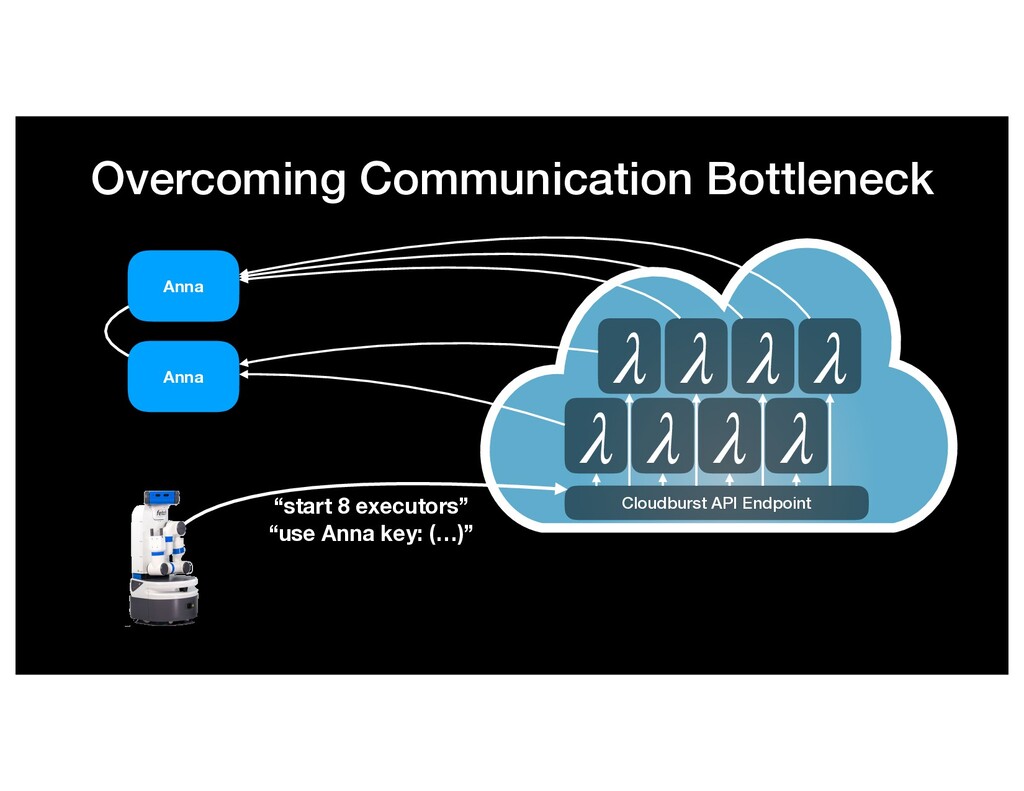
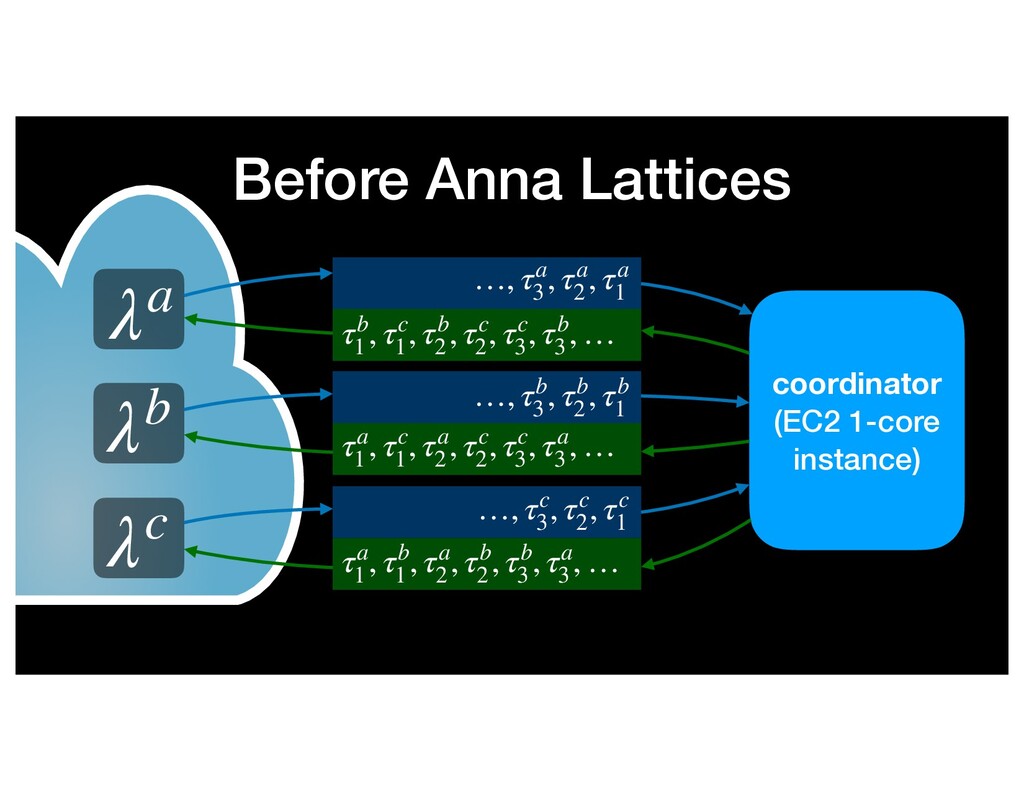
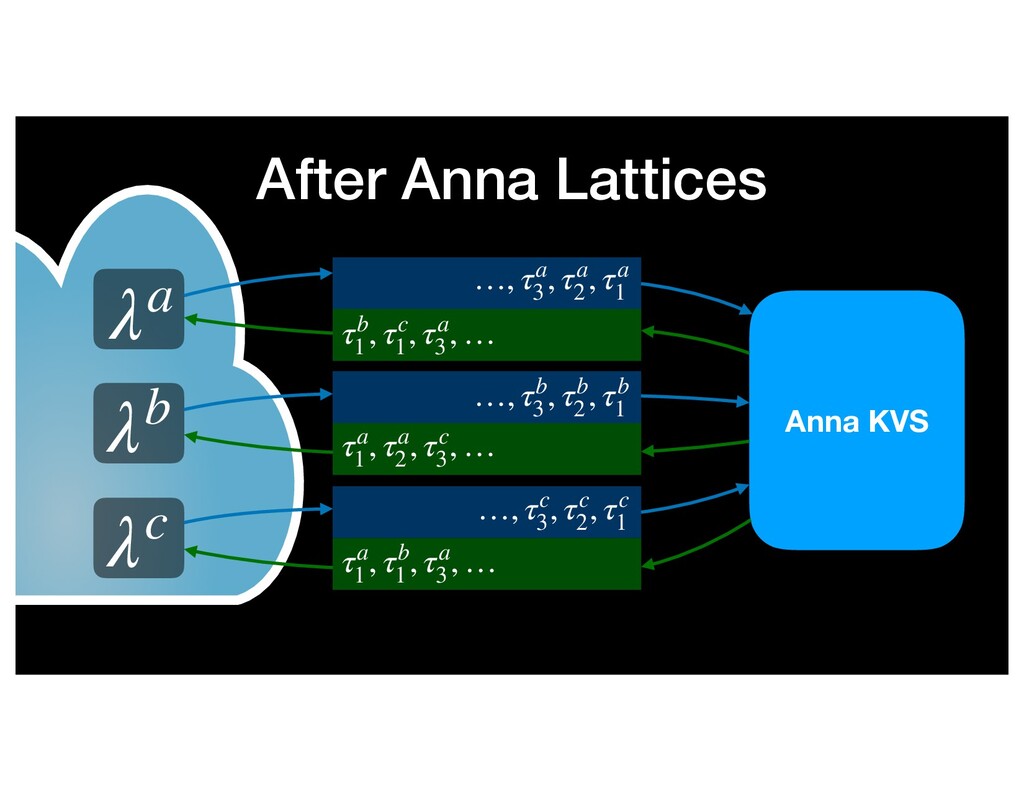
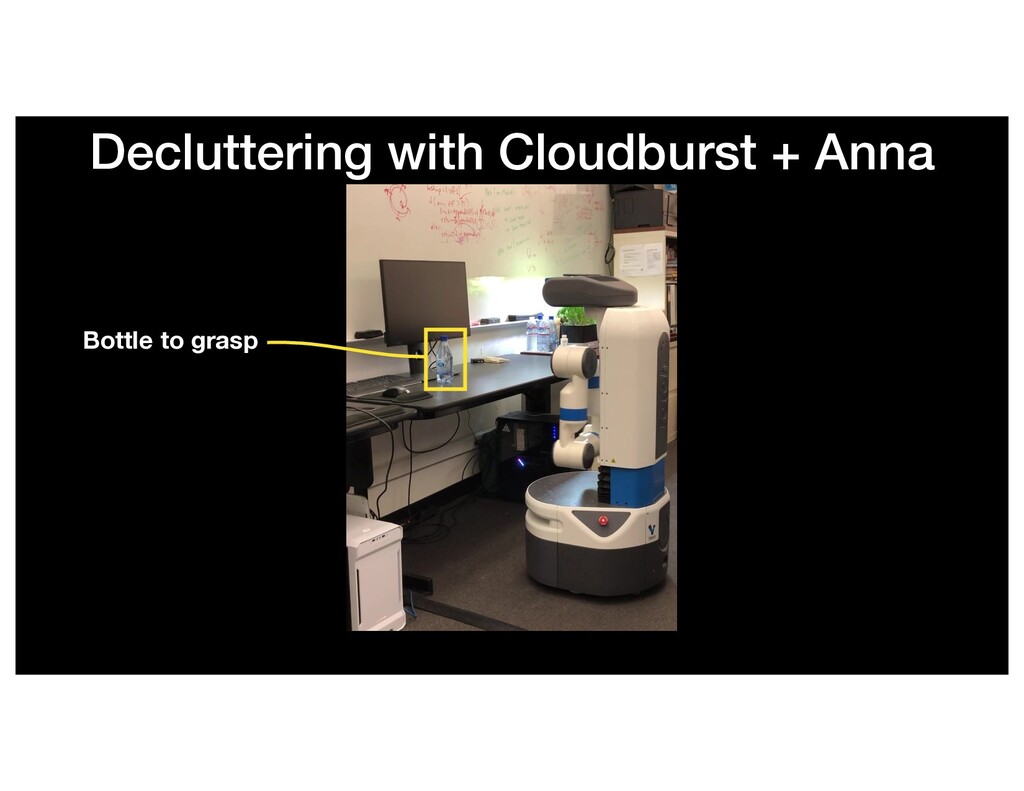
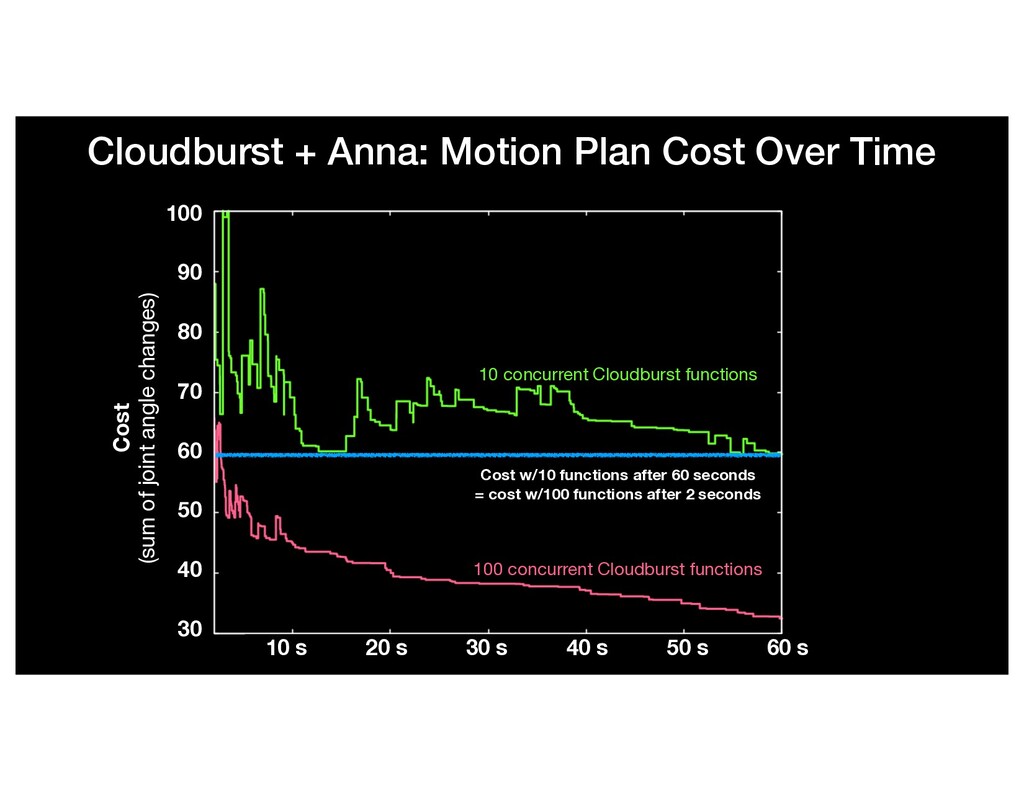
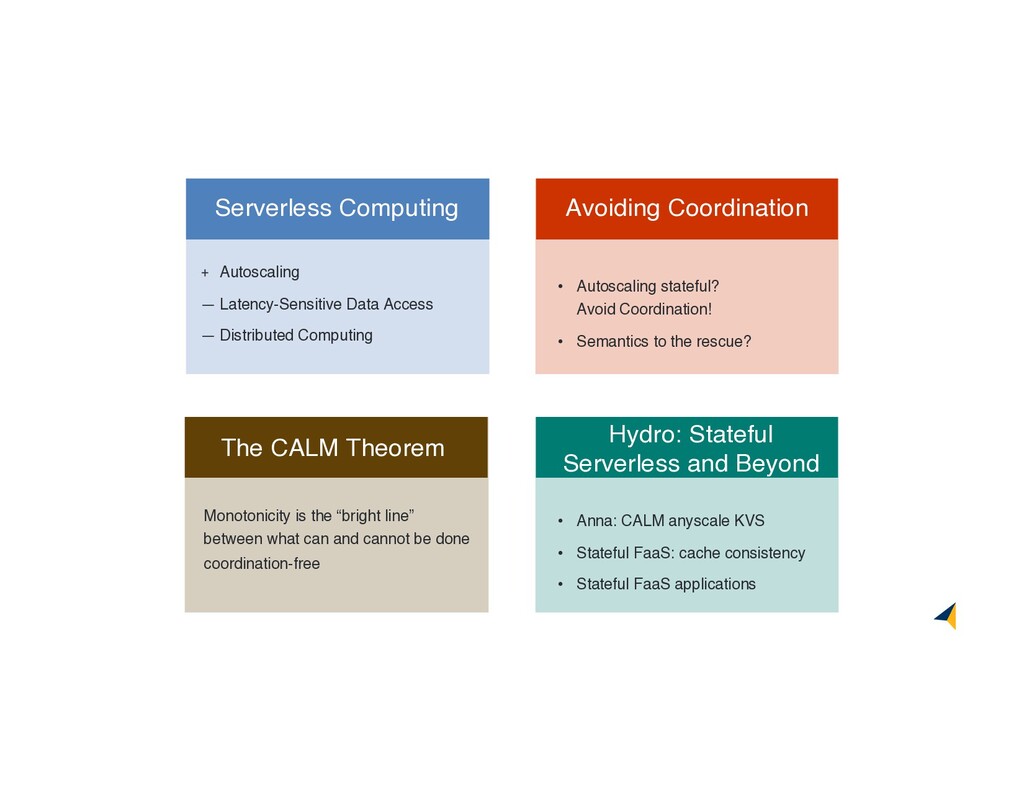
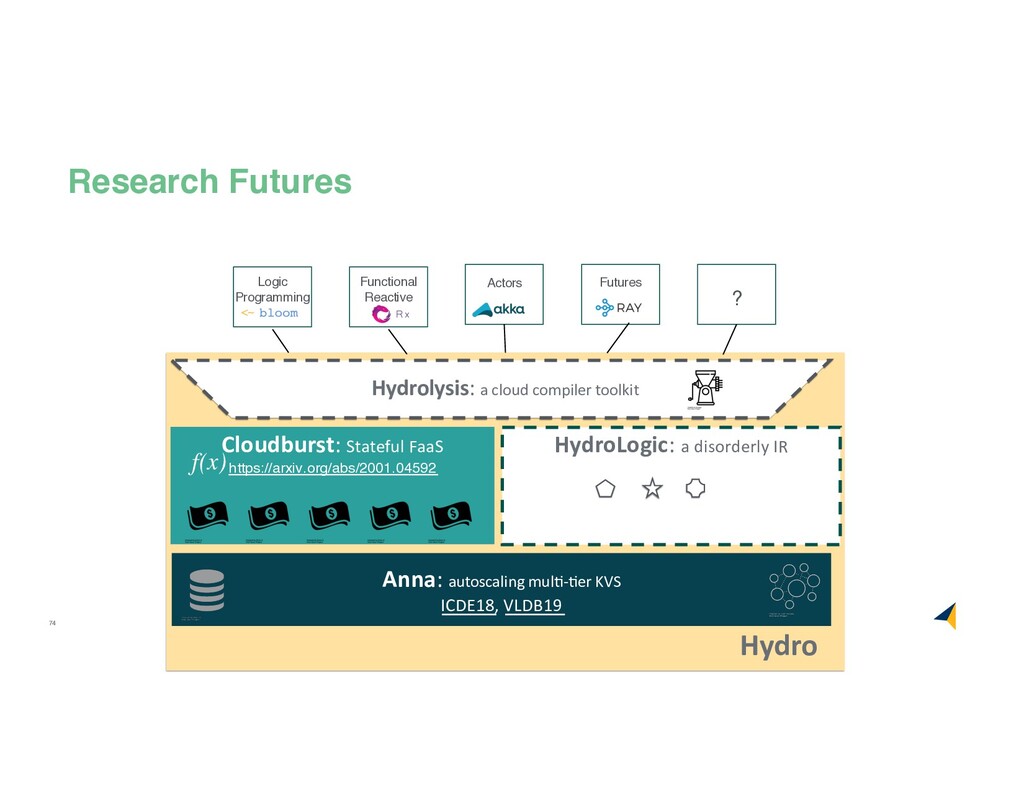
This talk will highlight some key principles for cloud programming that came out of database research, including the CALM Theorem and constructive approaches to monotonic coordination-free consistency. I will discuss a new platform called Hydro that we are building at Berkeley to take these ideas and combine them into a polyglot, pay-as-you-go platform for cloud programming and deployment. Early results on Hydro---and its underlying key-value store, Anna---point to major improvements that researchers can offer to Serverless Computing and public clouds. The talk will also illustrate emerging cloud opportunities for application areas of interest to our community, including prediction serving, data science and robotics.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Hydro: https://github.com/hydro-project Bloom: http://bloom-lang.net RiseLab: https://rise.cs.berkeley.edu [email protected] @joe_hellerstein 7 5](https://files.speakerdeck.com/presentations/f25e5151dee24456ad77c6144ee16f03/slide_74.jpg){kind=link}