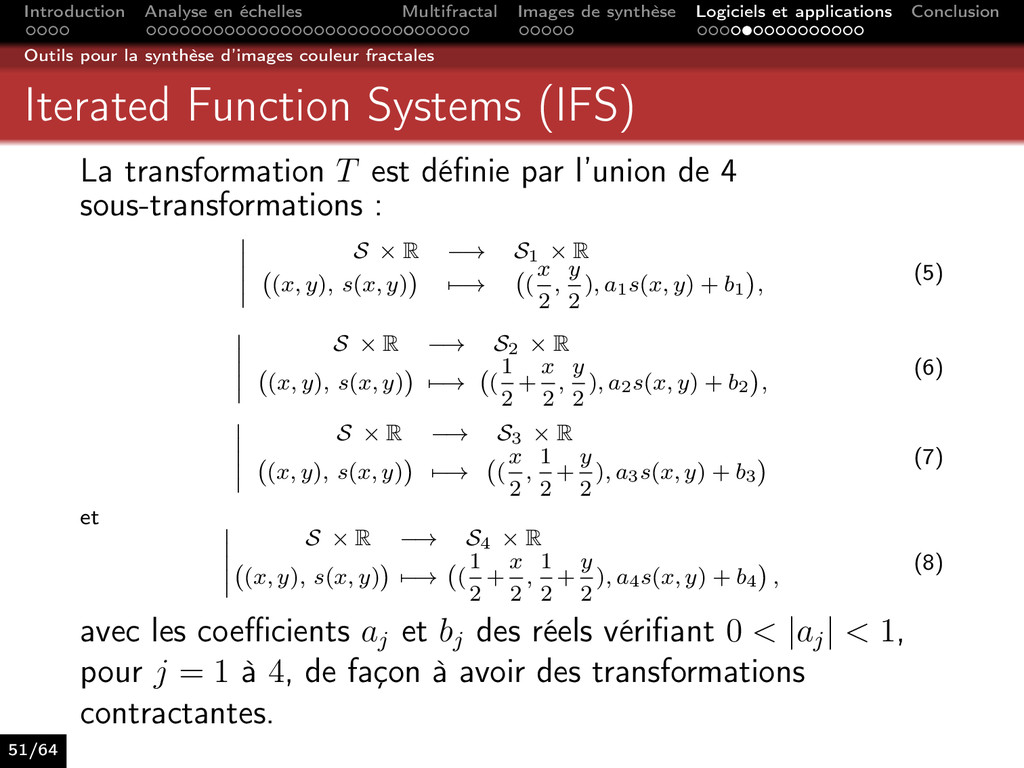
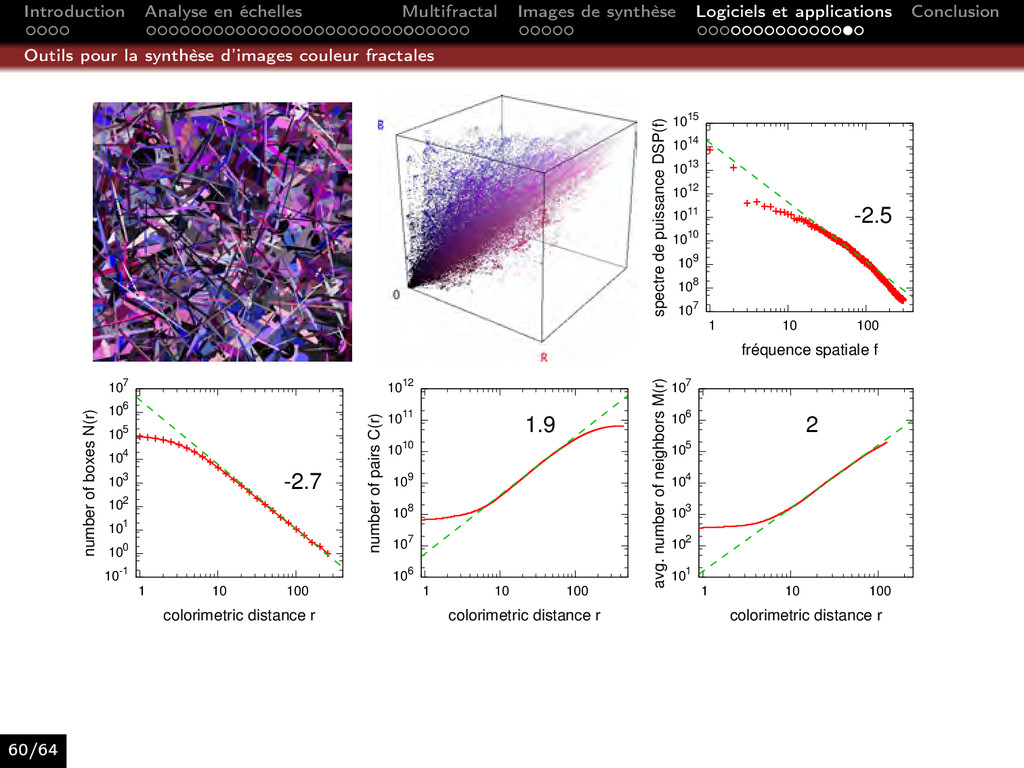
applications Conclusion Outils pour la synthèse d’images couleur fractales Iterated Function Systems (IFS) La transformation T est définie par l’union de 4 sous-transformations : S × R −→ S1 × R (x, y), s(x, y) −→ ( x 2 , y 2 ), a1s(x, y) + b1 , (5) S × R −→ S2 × R (x, y), s(x, y) −→ ( 1 2 + x 2 , y 2 ), a2s(x, y) + b2 , (6) S × R −→ S3 × R (x, y), s(x, y) −→ ( x 2 , 1 2 + y 2 ), a3s(x, y) + b3 (7) et S × R −→ S4 × R (x, y), s(x, y) −→ ( 1 2 + x 2 , 1 2 + y 2 ), a4s(x, y) + b4 , (8) avec les coefficients aj et bj des réels vérifiant 0 < |aj | < 1, pour j = 1 à 4, de façon à avoir des transformations contractantes. 51/64
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}