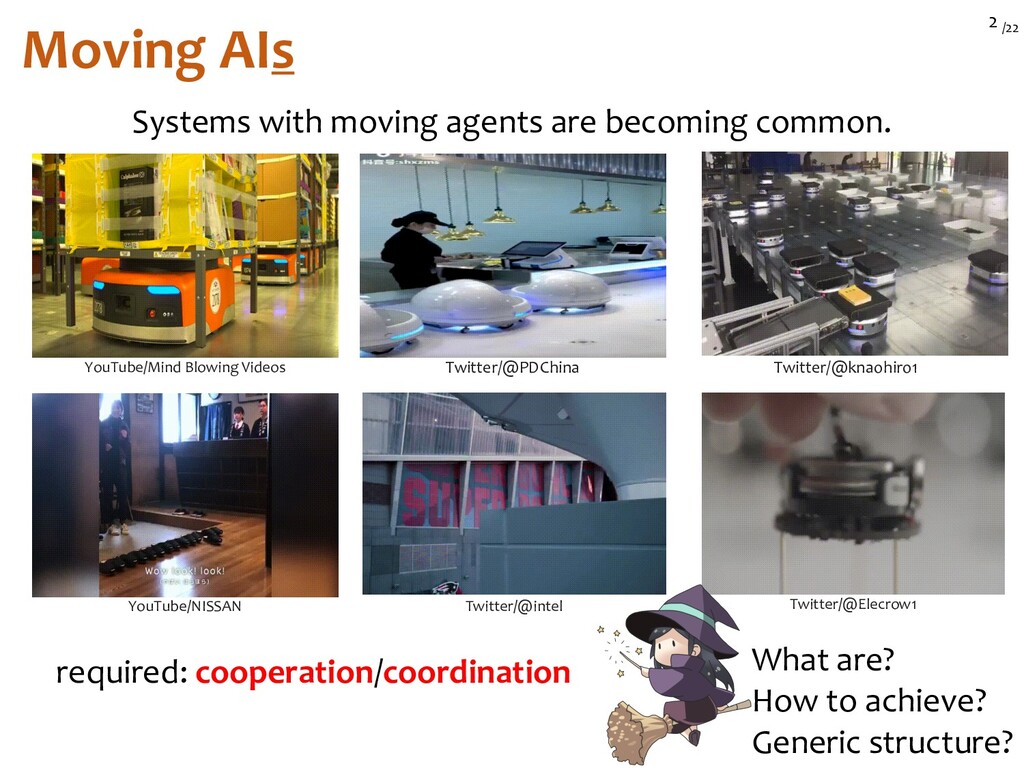
with moving agents are becoming common. YouTube/NISSAN Twitter/@intel Twitter/@Elecrow1 required: cooperation/coordination What are? How to achieve? Generic structure?
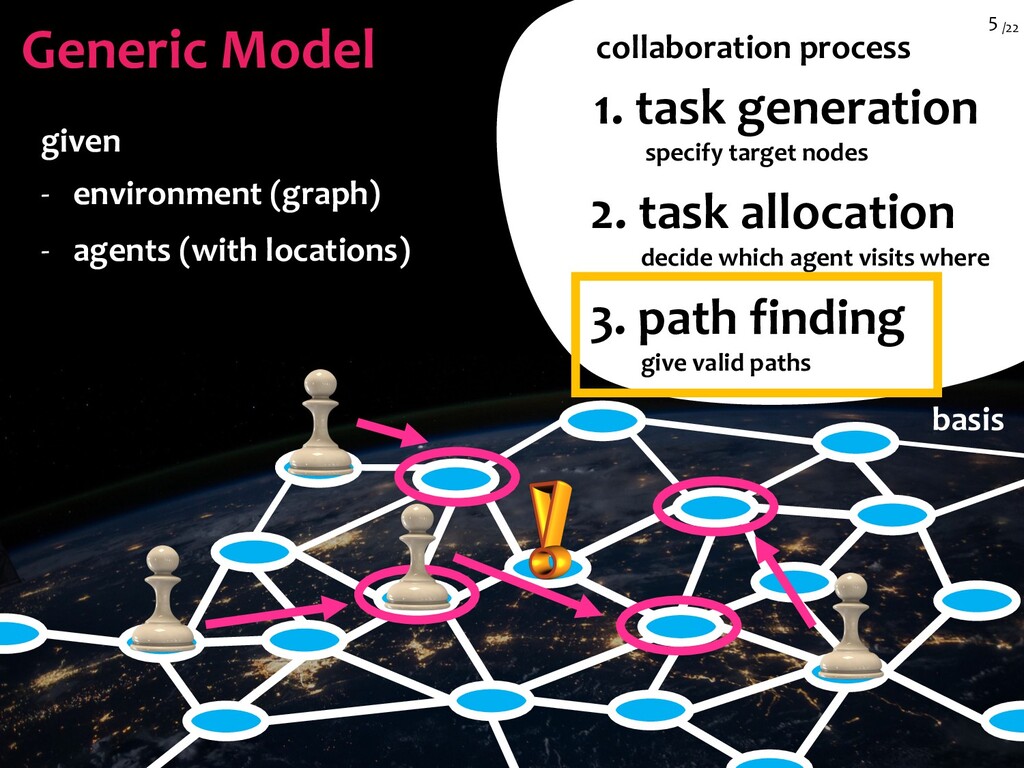
building a map of unknown environment with multi-robot Who should visit? process 2 Find paths for multiple agents process 3 Where should be visited? process 1 known unknown limited sensing ability frontier
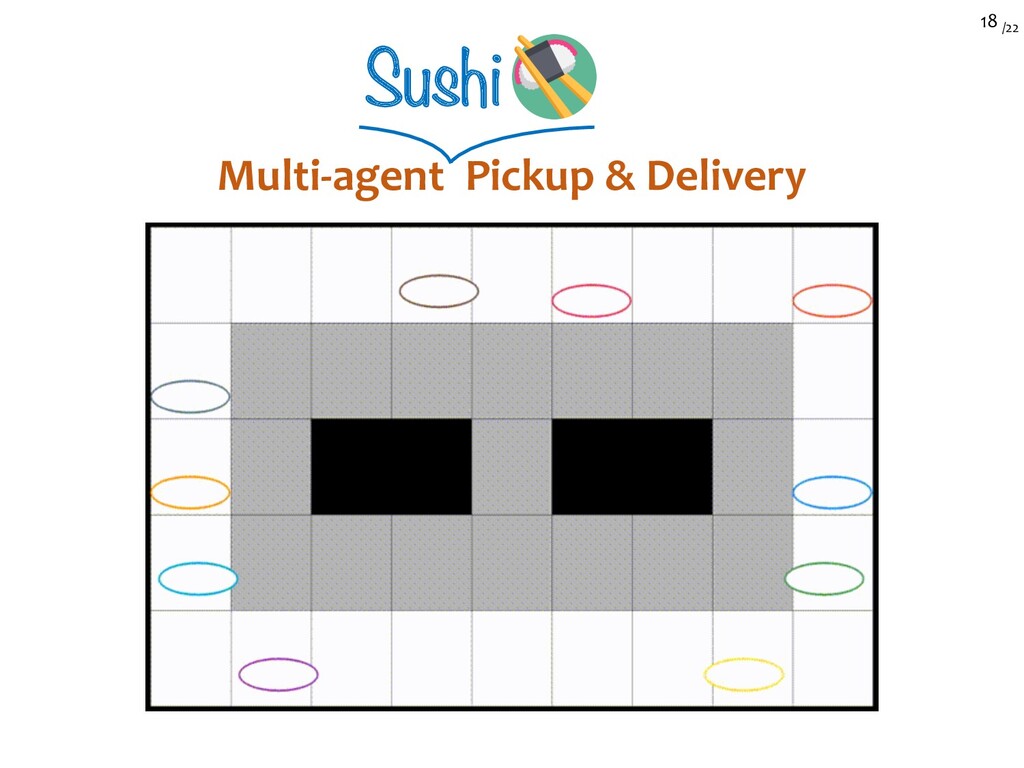
of packages in lifelong situations Who should visit? process 2 Find paths for multiple agents process 3 Where should be visited? process 1 delivery loc. pickup loc. given (Multi-agent Pickup & Delivery, MAPD)
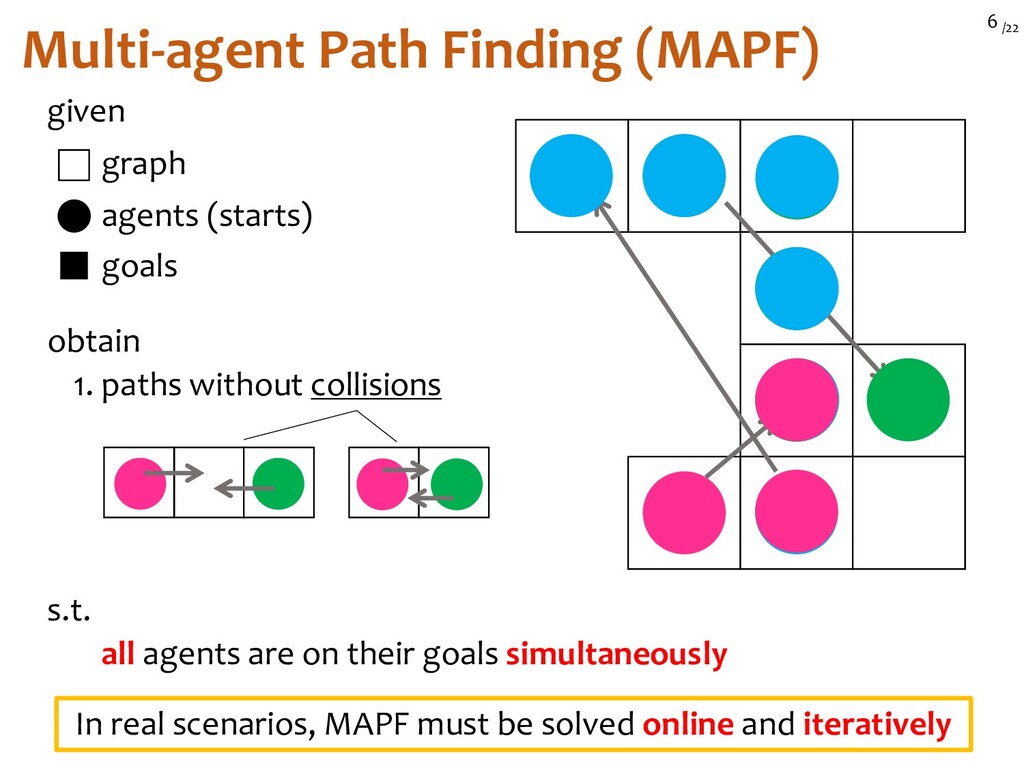
without collisions s.t. all agents are on their goals simultaneously In real scenarios, MAPF must be solved online and iteratively Multi-agent Path Finding (MAPF)
graph tasks (set of goals) X obtain 1. paths without collisions s.t. all tasks are completed in finite time 2. task allocation A C A B C [Okumura et al., IJCAI-19]
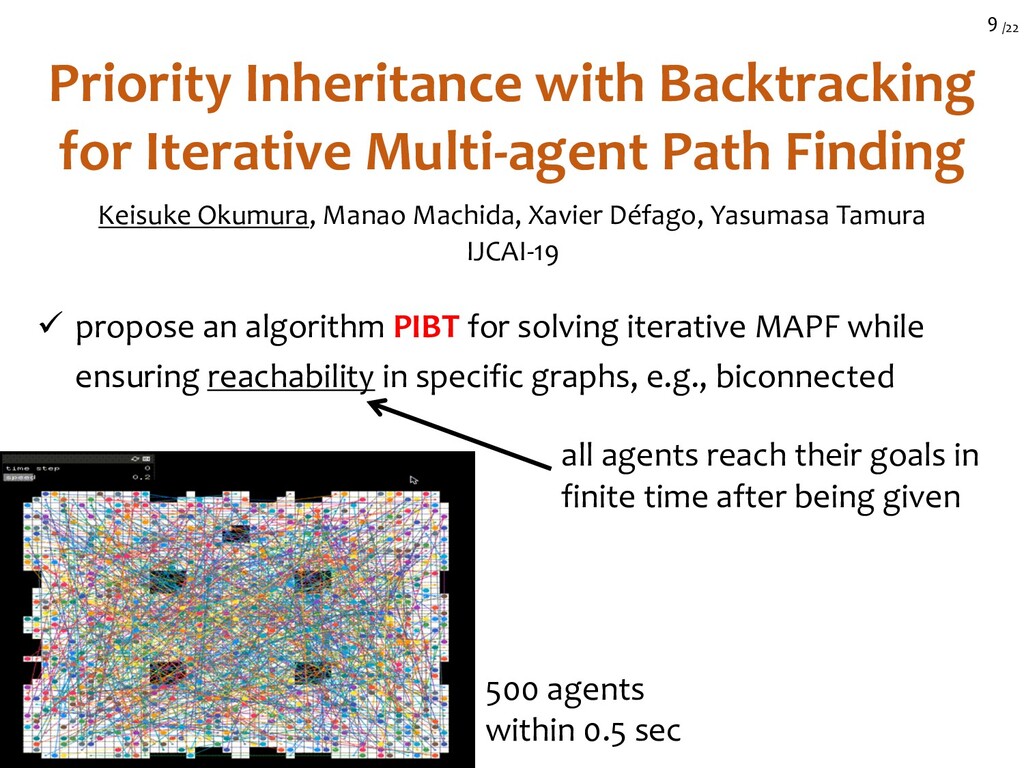
Finding Keisuke Okumura, Manao Machida, Xavier Défago, Yasumasa Tamura IJCAI-19 ü propose an algorithm PIBT for solving iterative MAPF while ensuring reachability in specific graphs, e.g., biconnected 500 agents within 0.5 sec all agents reach their goals in finite time after being given
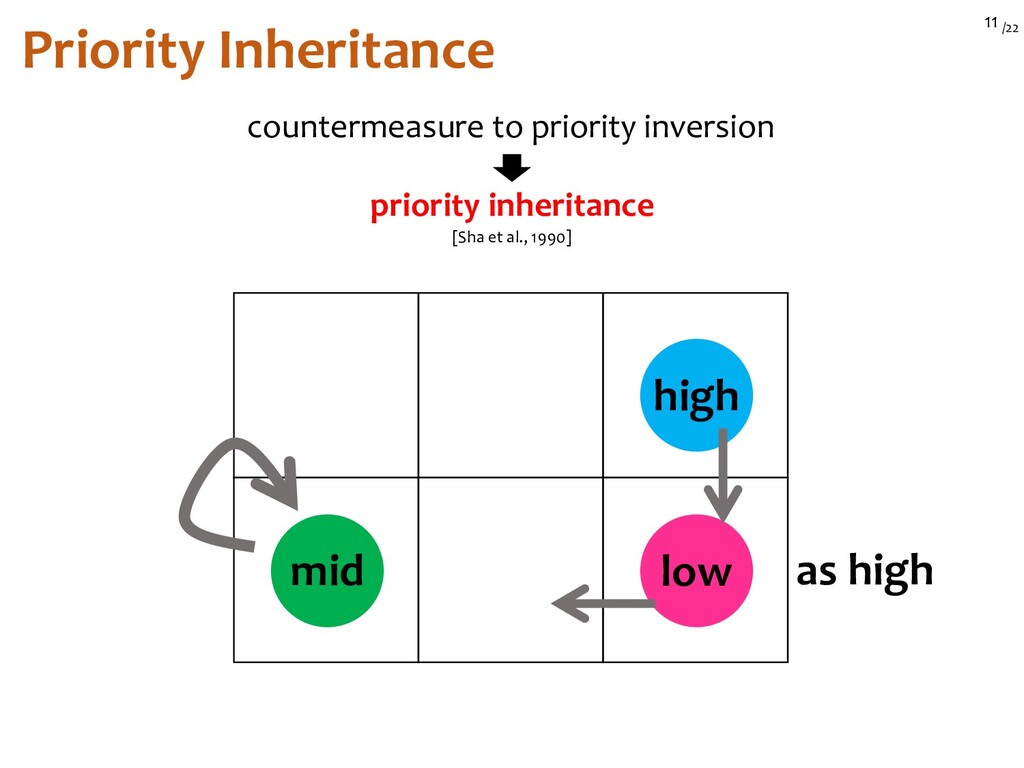
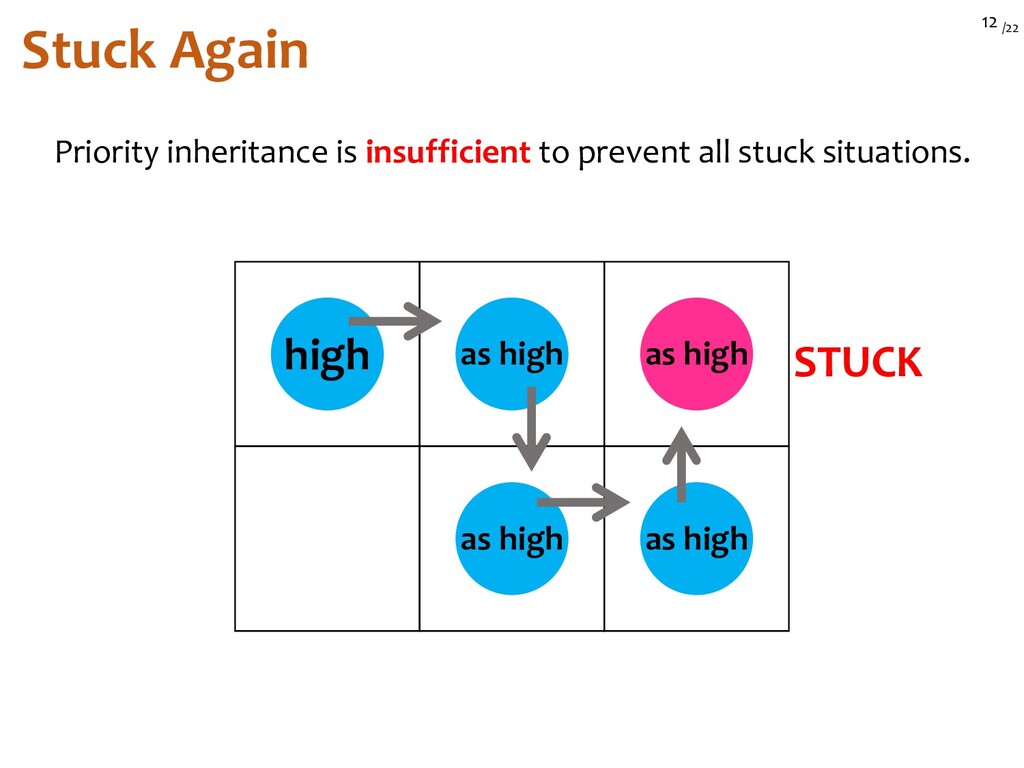
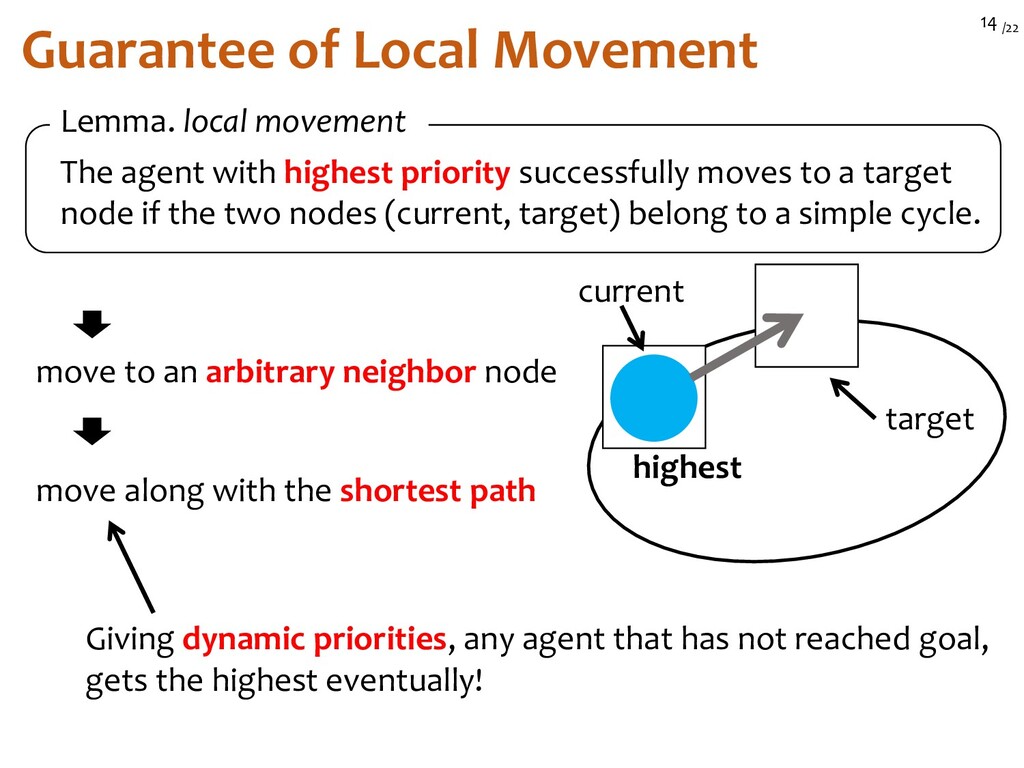
priority successfully moves to a target node if the two nodes (current, target) belong to a simple cycle. Lemma. local movement highest current target move to an arbitrary neighbor node move along with the shortest path Giving dynamic priorities, any agent that has not reached goal, gets the highest eventually!
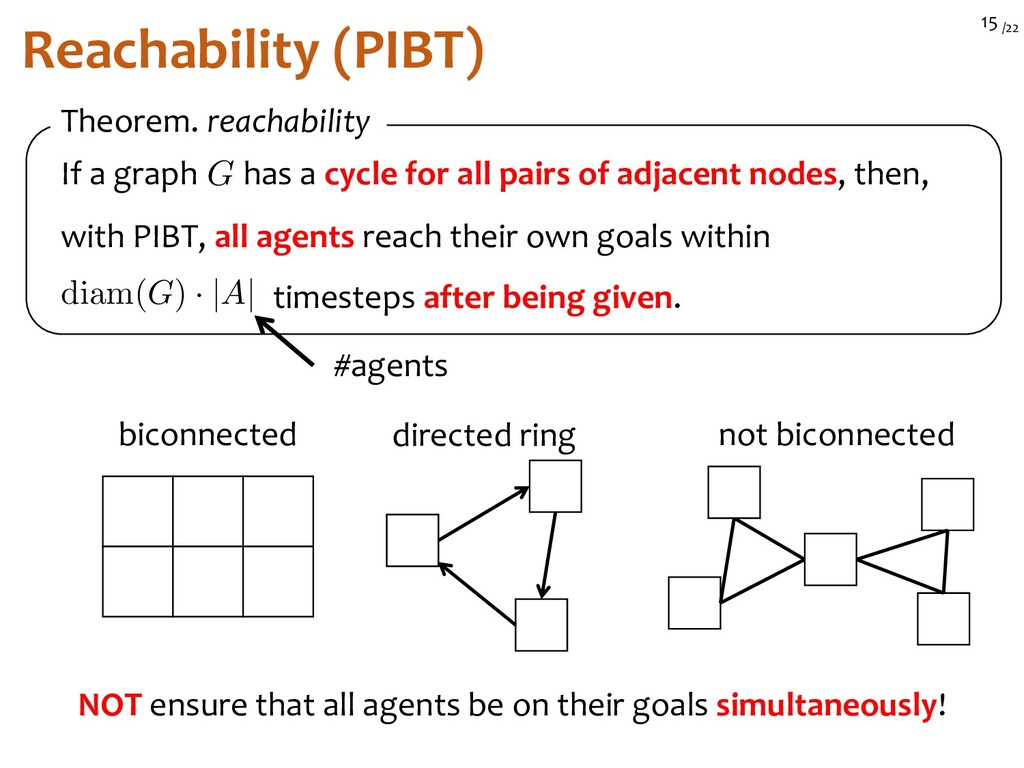
for all pairs of adjacent nodes, then, with PIBT, all agents reach their own goals within timesteps after being given. Theorem. reachability G <latexit sha1_base64="yVMSfsXKkBgam/Vt6xvyf13//ws=">AAACTXicbZFLSwMxFIUz9V2f1aWbYBFclRkVdVl0oUsFq4JTyp30tgbzGJKMWob6B9zq73LtD3EnYqYWrNYLgcN3ciD3JEkFty4M34LSxOTU9MzsXHl+YXFpeaWyemF1Zhg2mBbaXCVgUXCFDcedwKvUIMhE4GVye1T4l3doLNfq3PVSbEroKt7hDJxHZ8etlWpYCwdDx0U0FFUynNNWJdiL25plEpVjAqy9jsLUNXMwjjOB/XKcWUyB3UIXr71UINE288FL+3TTkzbtaOOPcnRARxM5SGt7MvE3Jbgb+9cr4I+n8J5pKUG18xhMV8JDP48LT6d5bCT17LGAseCSO9sfT3D1T8LDn8ToNq5z0My5SjOHin0v08kEdZoW1dI2N8ic6HkBzHDfB2U3YIA5/wFl33T0t9dxcbFdi3Zq4dlutX447HyWrJMNskUisk/q5ISckgZhBMkTeSYvwWvwHnwEn99XS8Ews0Z+TWnmC2o3tic=</latexit> diam(G) · |A| <latexit sha1_base64="Asn8QhFjVGk7W4BNG/bJ+1yoTx8=">AAACZXicbZHNThRBFIVrGkEc/gYlunBBxYkJbibdaJAl4EKXmDhAQk8mt6vvDBXqp1N1W5g07cuw1QfyCXwNq4dJQMabVHLynXsW91RWKOkpjn+3ooUni0tPl5+1V1bX1jc6m89PvC2dwL6wyrqzDDwqabBPkhSeFQ5BZwpPs8tPjX/6HZ2X1nyjSYEDDWMjR1IABTTsvEoJr6nKJeh65/O7VOSW+M3hzbDTjXvxdPi8SGaiy2ZzPNxs7aW5FaVGQ0KB9+dJXNCgAkdSKKzbaemxAHEJYzwP0oBGP6imF9T8bSA5H1kXniE+pQ8TFWjvJzoLmxrowj/2GnjvGbwSVmsweZWCG2u4rqu08WxRpU7zwH40MFVSS/L1fEKa/yQCvE88vIZG+4NKmqIkNOLumFGpOFneVM5z6VCQmgQBwsnQBxcX4EBQ+Jh2aDp53Ou8ONntJe978dcP3YOjWefL7DV7w3ZYwj6yA/aFHbM+E6xmt+wn+9X6E61FW9HLu9WoNcu8YP9MtP0XJ+S8mw==</latexit> #agents NOT ensure that all agents be on their goals simultaneously! biconnected directed ring not biconnected
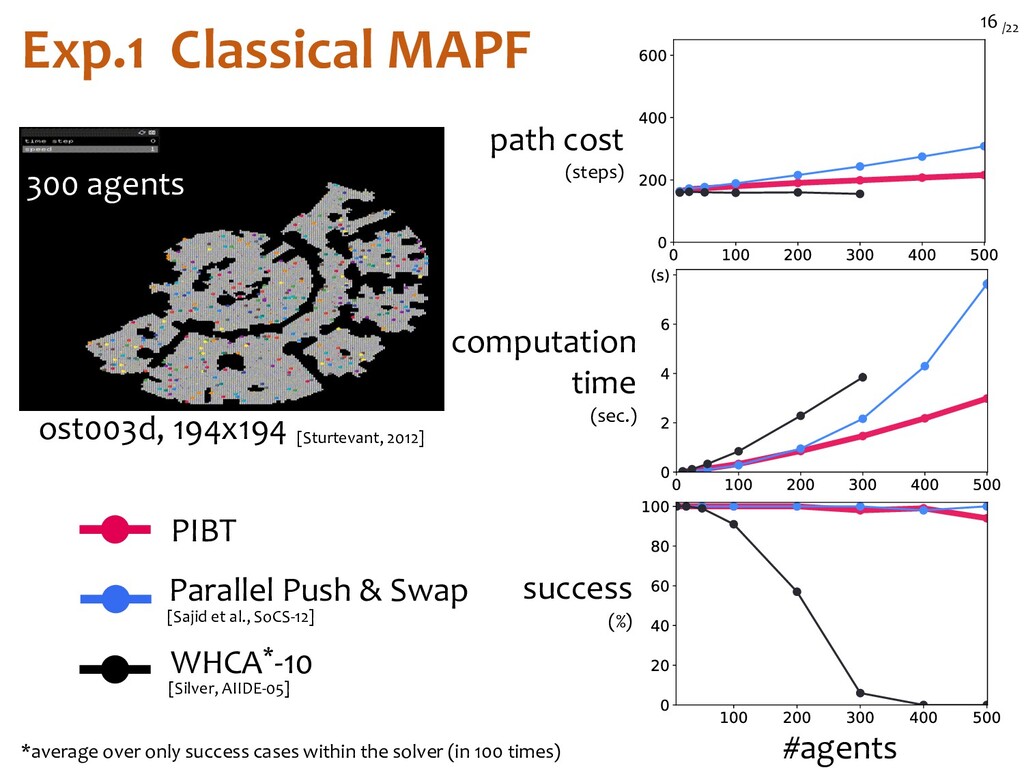
et al., SoCS-12] [Silver, AIIDE-05] WHCA*-10 PIBT ost003d, 194x194 [Sturtevant, 2012] 300 agents *average over only success cases within the solver (in 100 times) path cost (steps) #agents computation time (sec.) #agents success (%) #agents
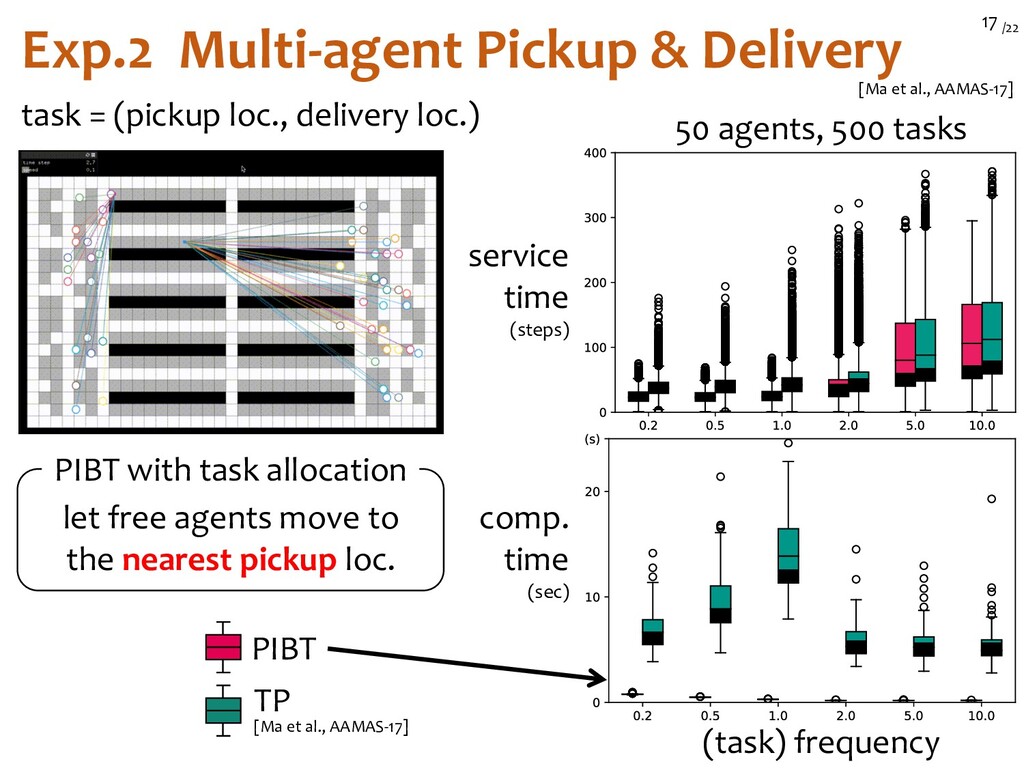
AAMAS-17] PIBT TP [Ma et al., AAMAS-17] task = (pickup loc., delivery loc.) let free agents move to the nearest pickup loc. PIBT with task allocation 50 agents, 500 tasks service time (steps) (task) frequency (task) frequency comp. time (sec)
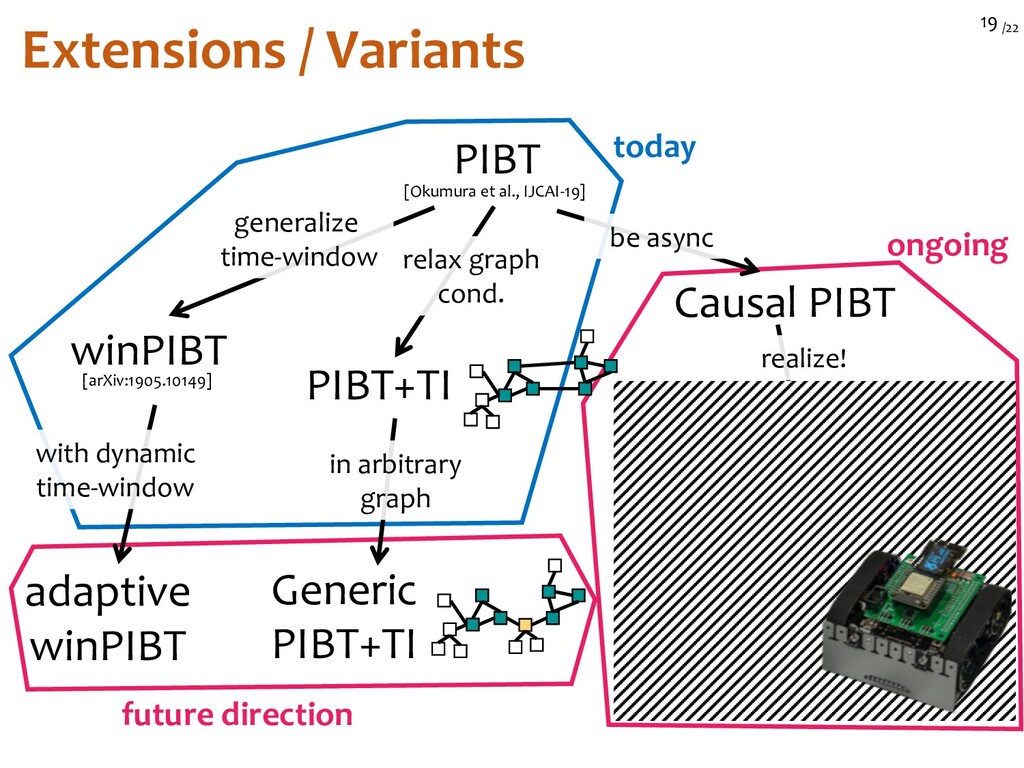
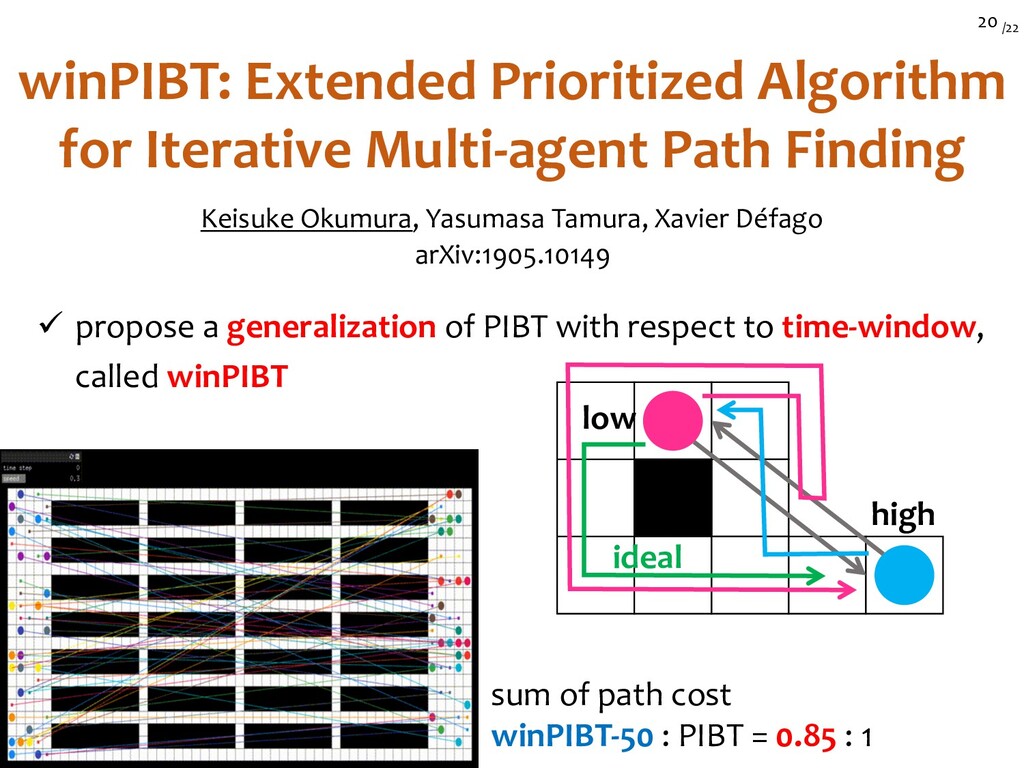
Finding Keisuke Okumura, Yasumasa Tamura, Xavier Défago arXiv:1905.10149 ü propose a generalization of PIBT with respect to time-window, called winPIBT high low ideal sum of path cost winPIBT-50 : PIBT = 0.85 : 1
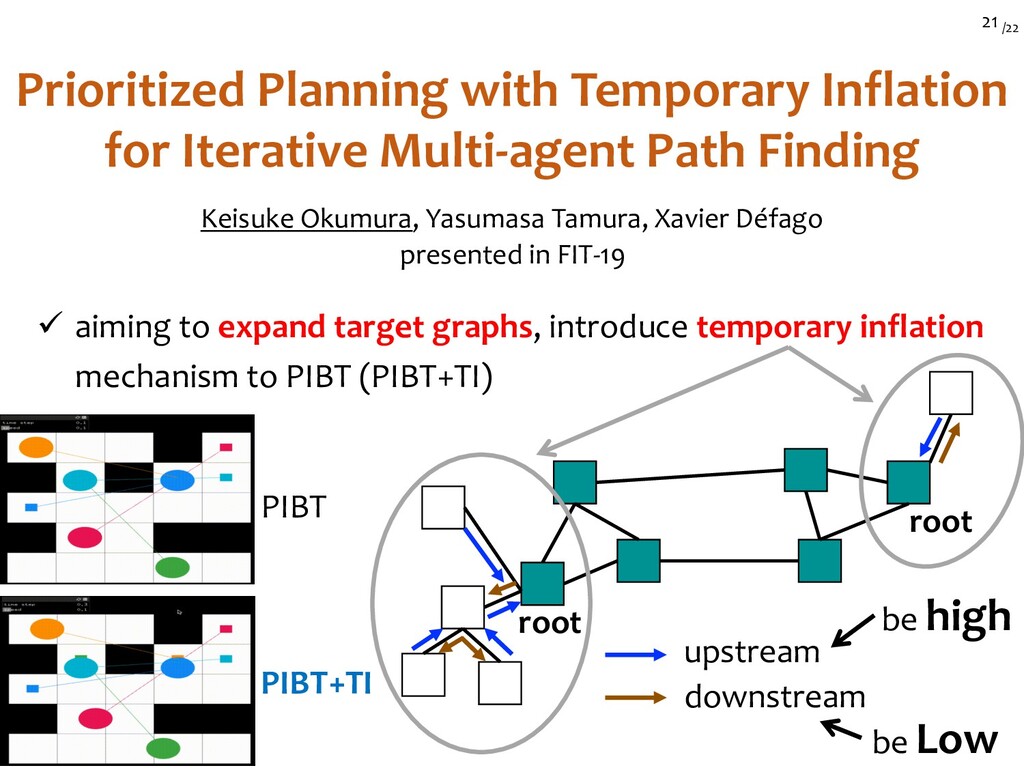
Path Finding Keisuke Okumura, Yasumasa Tamura, Xavier Défago presented in FIT-19 ü aiming to expand target graphs, introduce temporary inflation mechanism to PIBT (PIBT+TI) root root upstream downstream be high be Low PIBT PIBT+TI
allocation 3. path finding model iterative MAPF algorithm PIBT, winPIBT, PIBT+TI Magic Roundabout Wikipedia 1000 agents provide adaptive pathfinding method for countless agents REALITY communication time-assumption crash/fault TOY MODEL self-interested … …
{kind=link}
{kind=link}
![/22 3 Case Study - Exploration [Okumura et al., iCAST-18]](https://files.speakerdeck.com/presentations/dd76c207c2234af5b332d98803dcb92b/slide_2.jpg){kind=link}
![/22 4 Case Study - Warehouse [Ma et al.,AAMAS-17] conveying](https://files.speakerdeck.com/presentations/dd76c207c2234af5b332d98803dcb92b/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}