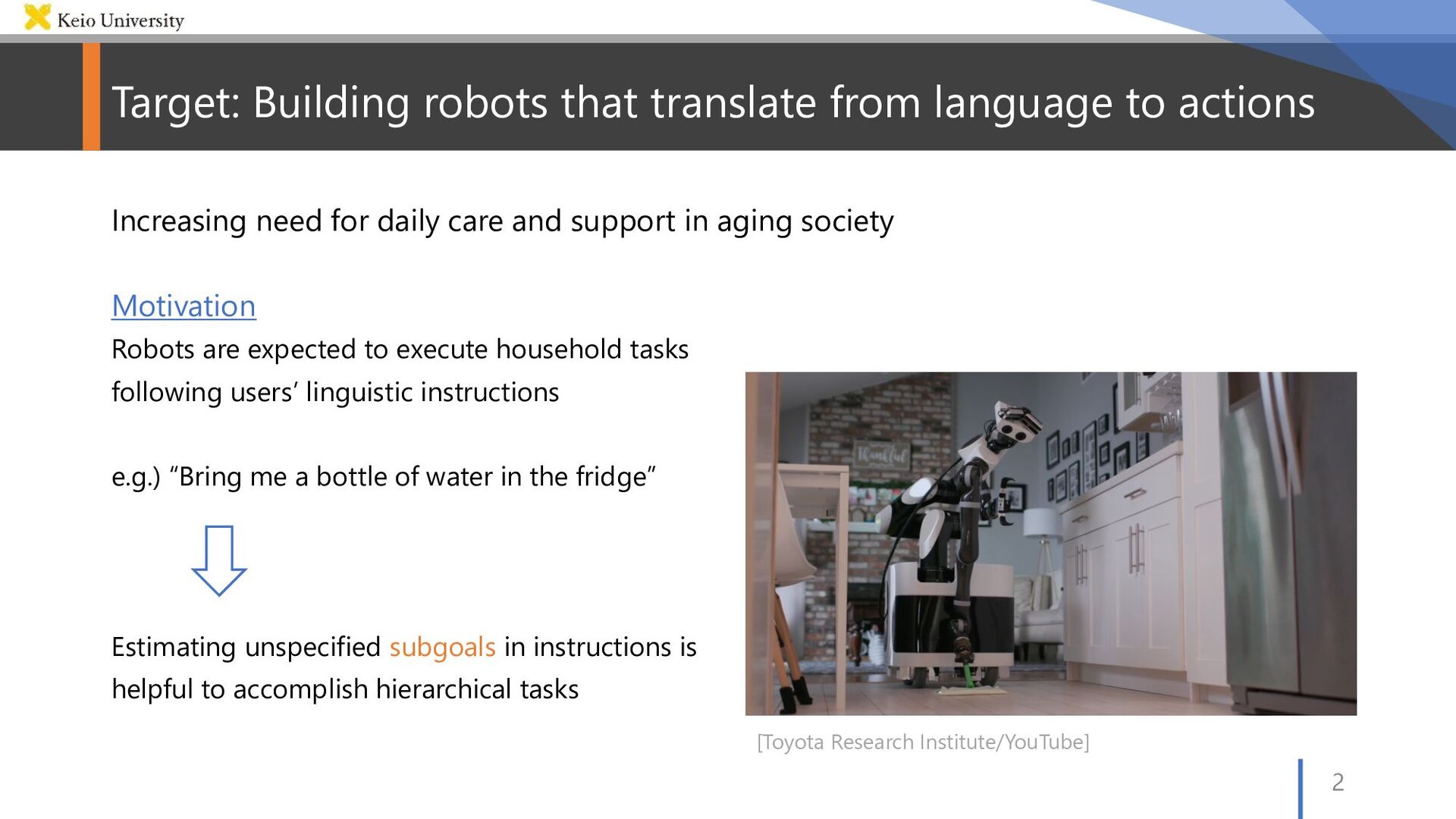
[Toyota Research Institute/YouTube] Increasing need for daily care and support in aging society Motivation Robots are expected to execute household tasks following users’ linguistic instructions e.g.) “Bring me a bottle of water in the fridge” Estimating unspecified subgoals in instructions is helpful to accomplish hierarchical tasks
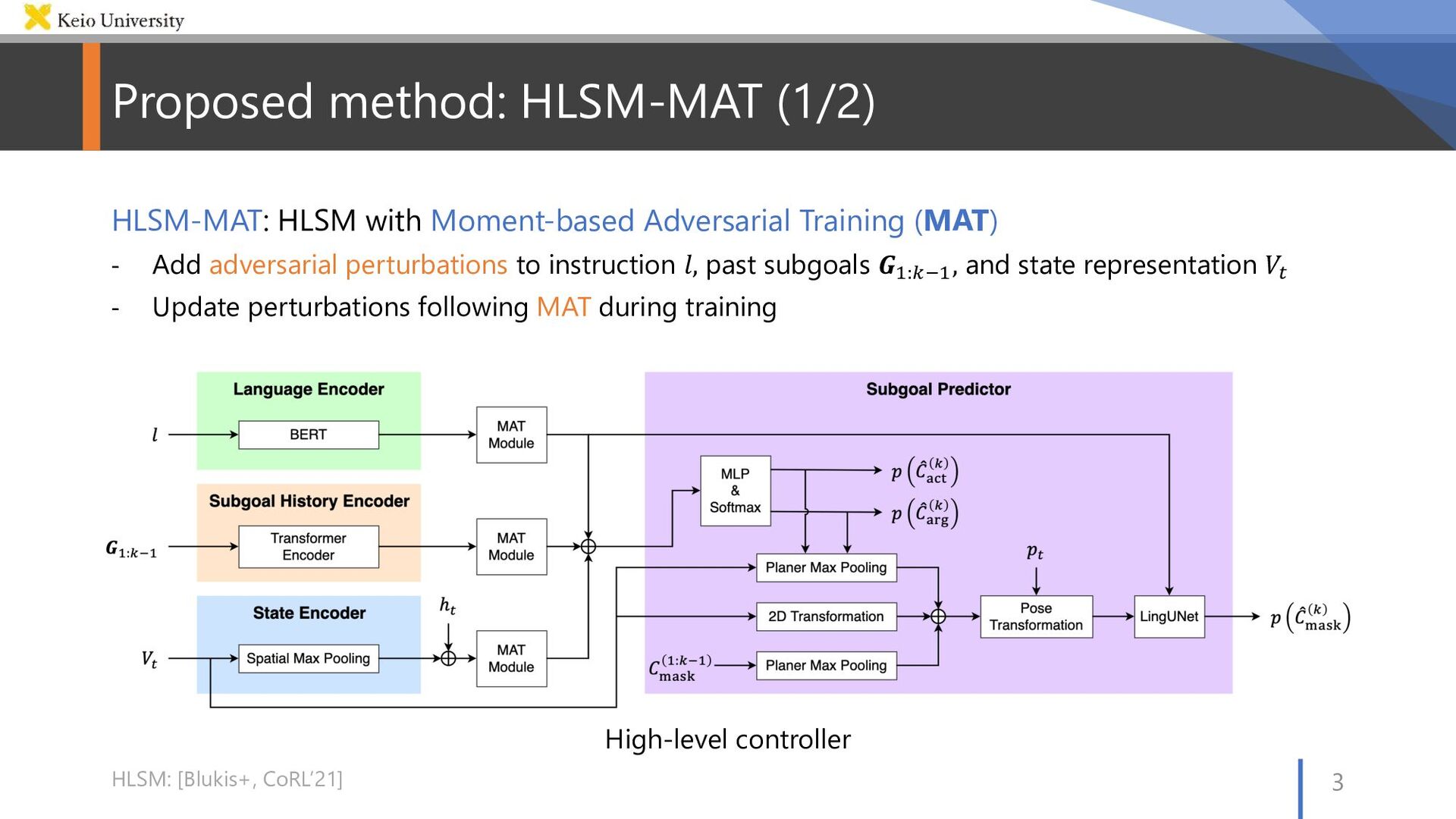
Training (MAT) - Add adversarial perturbations to instruction 𝑙, past subgoals 𝑮!:#$! , and state representation 𝑉% - Update perturbations following MAT during training High-level controller HLSM: [Blukis+, CoRL’21]
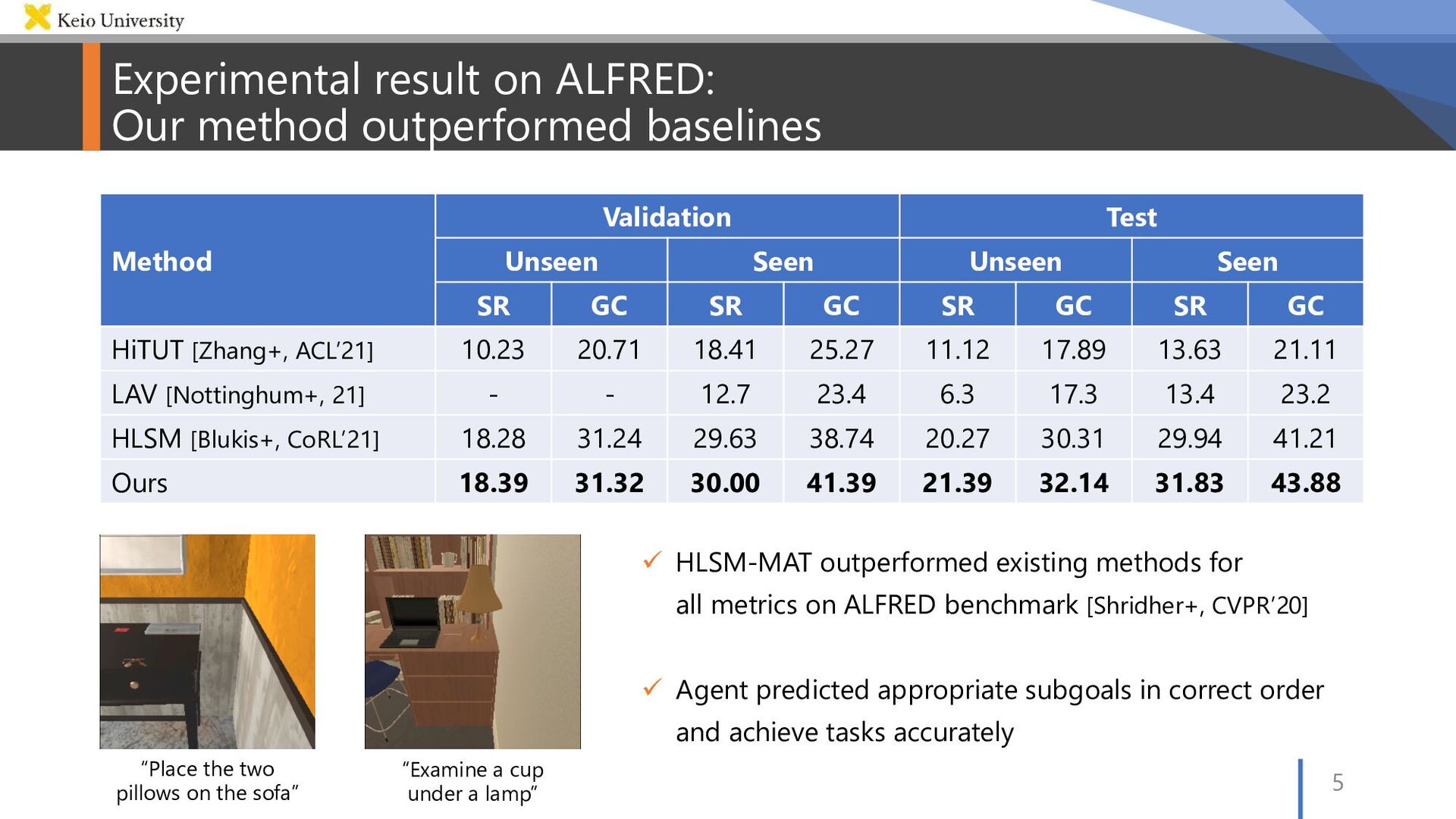
Validation Test Unseen Seen Unseen Seen SR GC SR GC SR GC SR GC HiTUT [Zhang+, ACL’21] 10.23 20.71 18.41 25.27 11.12 17.89 13.63 21.11 LAV [Nottinghum+, 21] - - 12.7 23.4 6.3 17.3 13.4 23.2 HLSM [Blukis+, CoRL’21] 18.28 31.24 29.63 38.74 20.27 30.31 29.94 41.21 Ours 18.39 31.32 30.00 41.39 21.39 32.14 31.83 43.88 ü HLSM-MAT outperformed existing methods for all metrics on ALFRED benchmark [Shridher+, CVPR’20] ü Agent predicted appropriate subgoals in correct order and achieve tasks accurately “Place the two pillows on the sofa” “Examine a cup under a lamp”
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}