Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
[Journal club] DoorGym: A Scalable Door Opening...
Search
Sponsored
·
Ship Features Fearlessly
Turn features on and off without deploys. Used by thousands of Ruby developers.
→
Semantic Machine Intelligence Lab., Keio Univ.
PRO
August 15, 2022
Technology
1.5k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
[Journal club] DoorGym: A Scalable Door Opening Environment and Baseline Agent
Semantic Machine Intelligence Lab., Keio Univ.
PRO
August 15, 2022
More Decks by Semantic Machine Intelligence Lab., Keio Univ.
See All by Semantic Machine Intelligence Lab., Keio Univ.
[MIRU26] Open-Vocabulary Intention-Guided Object Detection in Diverse Scenes
keio_smilab
PRO
0
79
[Journal club] Evo-1: Lightweight Vision-Language-Action Model with Preserved Semantic Alignment
keio_smilab
PRO
0
23
[MIRU26] To What Extent Does MLLM-as-a-Judge Exhibit Cross-Model Preference Bias?
keio_smilab
PRO
0
100
[Journal club] FlashVID: Efficient Video Large Language Models via Training-free Tree-based Spatiotemporal Token Merging
keio_smilab
PRO
0
16
[Journal club] DyCoke: Dynamic Compression of Tokens for Fast Video Large Language Models
keio_smilab
PRO
1
42
[Journal club] SpecVLM: Enhancing Speculative Decoding of Video LLMs via Verifier-Guided Token Pruning
keio_smilab
PRO
0
26
[Journal club] Predict Before You Explore: Predictive Planning with Specialized Memory for Embodied Question Answering
keio_smilab
PRO
0
94
[Journal club] PHyCLIP: 𝒍𝟏-Product of Hyperbolic Factors Unifies Hierarchy and Compositionality in Vision-Language Representation Learning
keio_smilab
PRO
0
90
[Journal club] ReMEmbR: Building and Reasoning Over Long-Horizon Spatio-Temporal Memory for Robot Navigation
keio_smilab
PRO
0
120
Other Decks in Technology
See All in Technology
エンタープライズデータへ安全につなぐ Production-ready なエージェント設計 ― AI × MCP リファレンスアーキテクチャ ― #AIDevDay
cdataj
1
450
Claude Mythos、Fable...フロンティアAIの最新動向と企業のセキュリティ対策
flatt_security
0
180
もう一度考える SRE チームの作り方・育て方 / Rethinking SRE #1: Building and Growing SRE Teams
rrreeeyyy
4
620
【CEDEC2026】ゲームシナリオライターを支援するAIツール開発の実践 ― 設計とプロンプトの工夫 ―
cygames
PRO
1
160
Master Dataグループ紹介資料
sansan33
PRO
1
4.8k
コンポーネント名には何を含めるべきなのか? / what-should-be-included-in-component-names
airrnot1106
0
230
MCPをつなげて作る組織横断のAIエージェント基盤
tsubakimoto_s
0
530
実践が先生だった— 新卒サーバーエンジニア1年目のリアル
mixi_engineers
PRO
0
220
システム監視入門
grimoh
5
790
SnowflakeCoCoでデータエンジニアリング!
foursue
0
110
侵入は突然に 〜 IoTマルウェアと悪用される家庭の機器 ~ / When Intrusion Strikes: IoT Malware and the Abuse of Home Devices
nttcom
0
660
なぜ、あなたのエージェントは言うことを聞かないのか
segavvy
1
610
Featured
See All Featured
Agile that works and the tools we love
rasmusluckow
331
22k
The Art of Delivering Value - GDevCon NA Keynote
reverentgeek
16
2.1k
実際に使うSQLの書き方 徹底解説 / pgcon21j-tutorial
soudai
PRO
201
75k
Google's AI Overviews - The New Search
badams
0
1.1k
Thoughts on Productivity
jonyablonski
76
5.3k
Primal Persuasion: How to Engage the Brain for Learning That Lasts
tmiket
0
400
Navigating the Design Leadership Dip - Product Design Week Design Leaders+ Conference 2024
apolaine
1
380
Chasing Engaging Ingredients in Design
codingconduct
0
250
Building Experiences: Design Systems, User Experience, and Full Site Editing
marktimemedia
0
560
Stewardship and Sustainability of Urban and Community Forests
pwiseman
0
410
Producing Creativity
orderedlist
PRO
348
40k
Put a Button on it: Removing Barriers to Going Fast.
kastner
60
4.5k
Transcript
慶應義塾大学 杉浦孔明研究室 是方諒介 DoorGym: A Scalable Door Opening Environment and
Baseline Agent Yusuke Urakami1, Alec Hodgkinson1, Casey Carlin1, Randall Leu1, Luca Rigazio1,2, Pieter Abbeel3 (1Panasonic Beta, 2Totemic Inc., 3University of California Berkeley) NeurIPS 2019 Deep Reinforcement Learning Workshop Yusuke Urakami, Alec Hodgkinson, Casey Carlin, Randall Leu, Luca Rigazio, Pieter Abbeel. "DoorGym: A Scalable Door Opening Environment and Baseline Agent.“ NeurIPS 2019 Deep Reinforcement Learning Workshop.
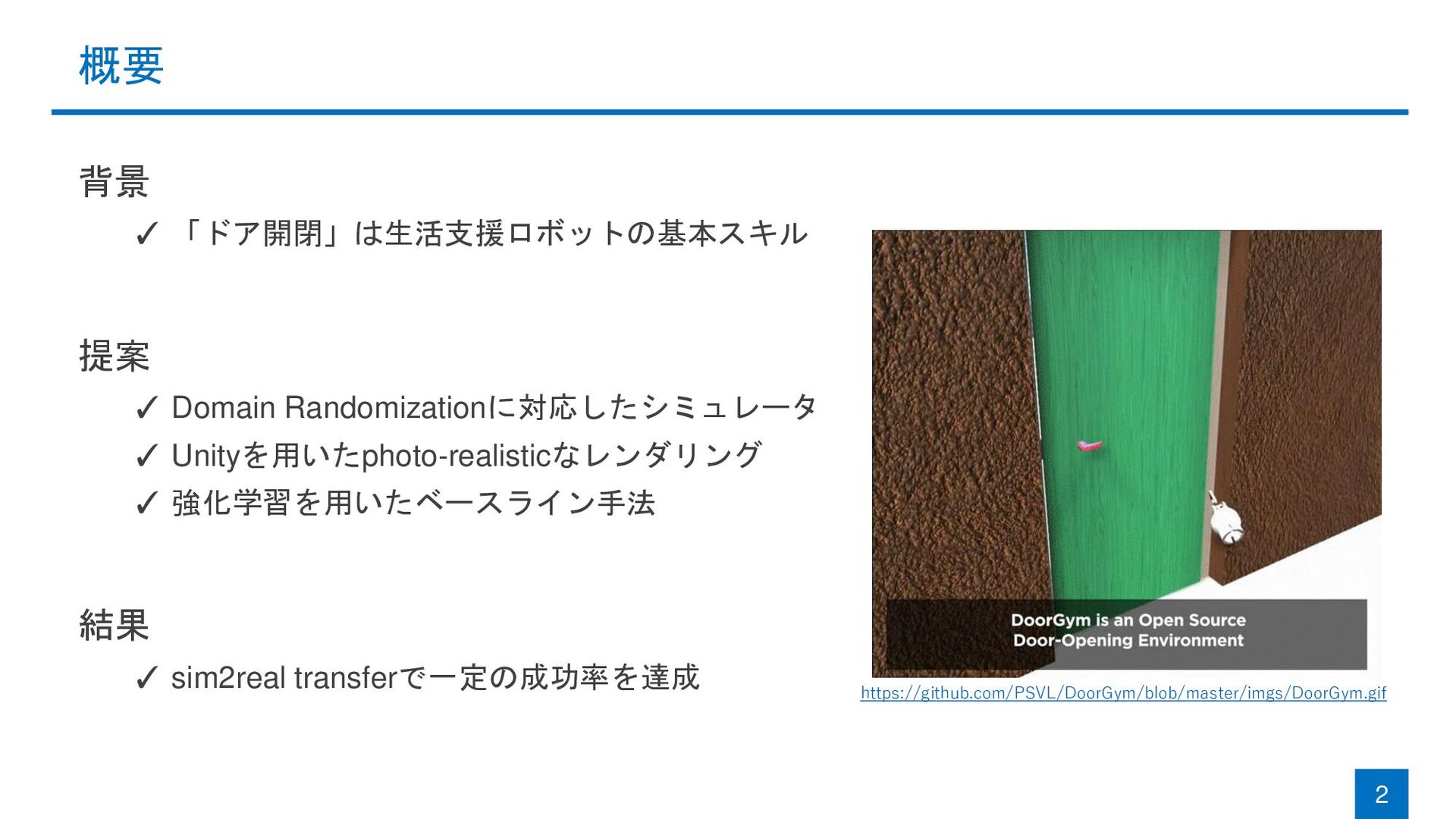
概要 背景 ✓ 「ドア開閉」は生活支援ロボットの基本スキル 提案 ✓ Domain Randomizationに対応したシミュレータ ✓ Unityを用いたphoto-realisticなレンダリング
✓ 強化学習を用いたベースライン手法 結果 ✓ sim2real transferで一定の成功率を達成 2 https://github.com/PSVL/DoorGym/blob/master/imgs/DoorGym.gif
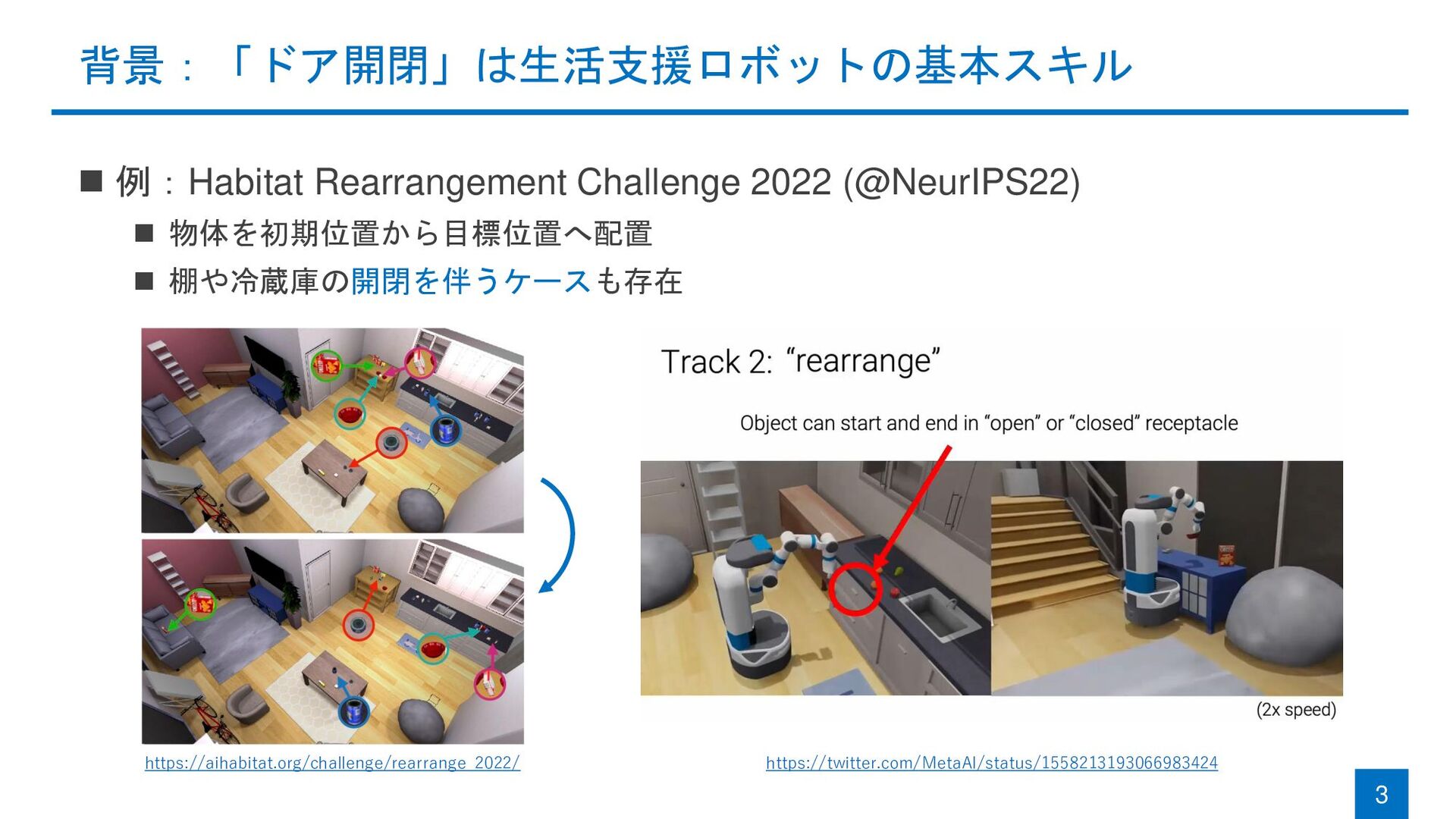
背景:「ドア開閉」は生活支援ロボットの基本スキル ◼ 例:Habitat Rearrangement Challenge 2022 (@NeurIPS22) ◼ 物体を初期位置から目標位置へ配置 ◼
棚や冷蔵庫の開閉を伴うケースも存在 3 https://twitter.com/MetaAI/status/1558213193066983424 https://aihabitat.org/challenge/rearrange_2022/
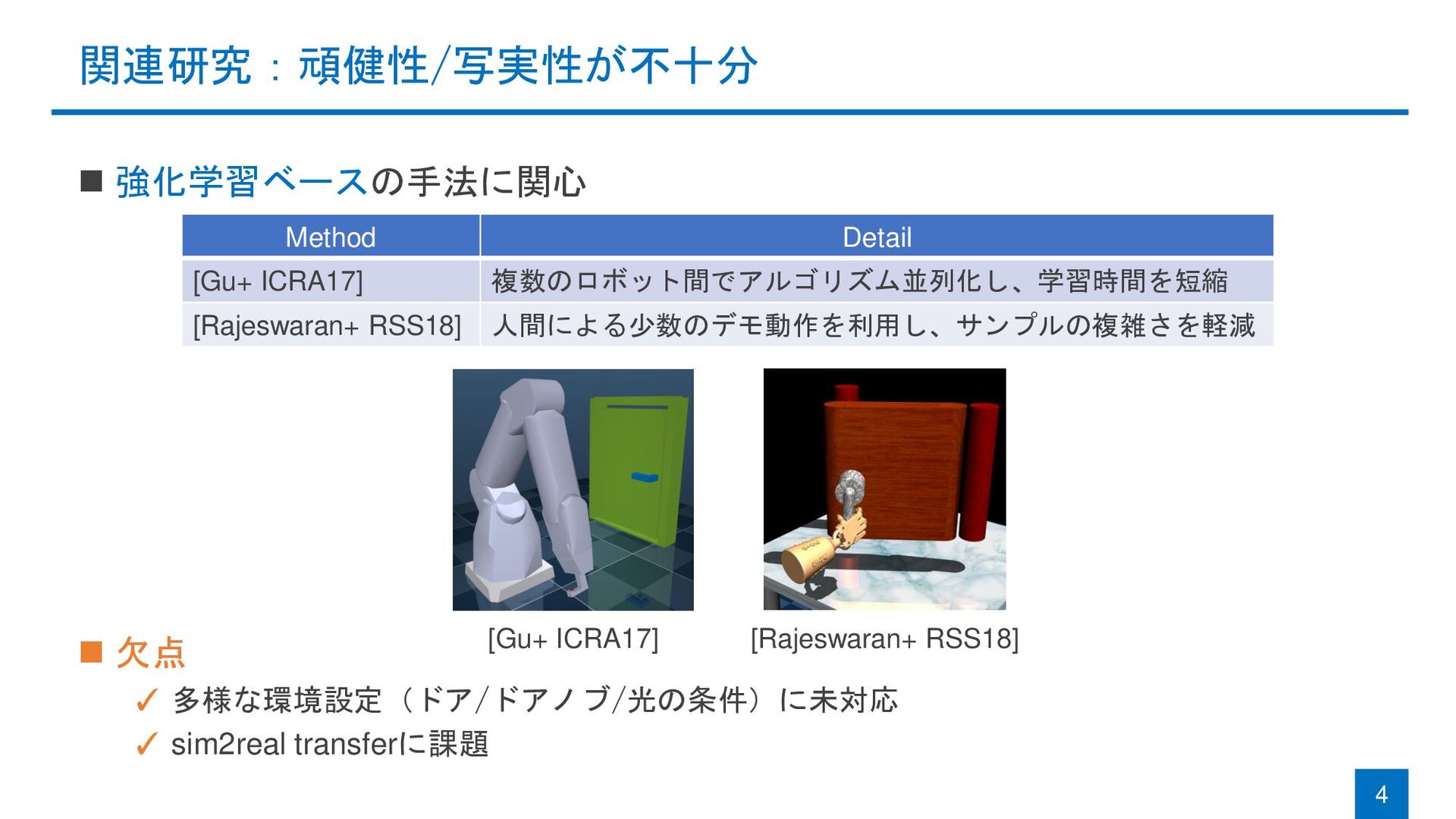
関連研究:頑健性/写実性が不十分 ◼ 強化学習ベースの手法に関心 ◼ 欠点 ✓ 多様な環境設定(ドア/ドアノブ/光の条件)に未対応 ✓ sim2real transferに課題
4 Method Detail [Gu+ ICRA17] 複数のロボット間でアルゴリズム並列化し、学習時間を短縮 [Rajeswaran+ RSS18] 人間による少数のデモ動作を利用し、サンプルの複雑さを軽減 [Gu+ ICRA17] [Rajeswaran+ RSS18]
提案手法:DoorGym ◼ Domain Randomizationに対応したドア開閉タスク用シミュレータ ◼ OpenAI Gym [Brockman+ 16] フレームワーク/Unity
Game Engineに基づく ◼ 強化学習を用いたベースライン手法を提供 ① ドアノブの中心座標予測 ② 各アクチュエータの行動選択 5 学習パイプライン
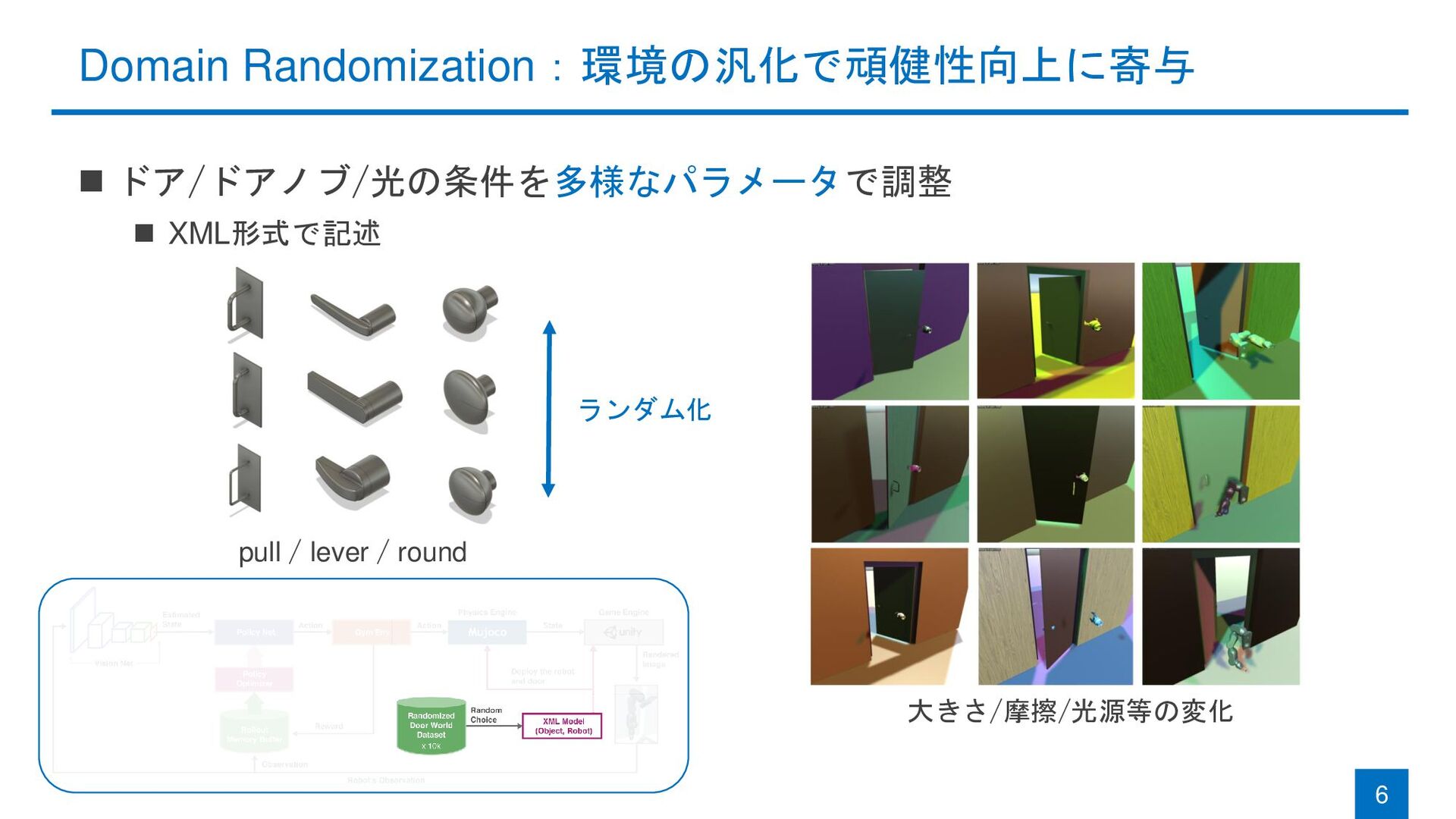
Domain Randomization:環境の汎化で頑健性向上に寄与 ◼ ドア/ドアノブ/光の条件を多様なパラメータで調整 ◼ XML形式で記述 6 pull / lever
/ round ランダム化 大きさ/摩擦/光源等の変化
Unity Game Engine:レンダリング品質の向上 ◼ 実機への転移のため、よりphoto-realisticな影やテクスチャを実現 7 MuJoCo [Todorov+ IROS12] Unity
>
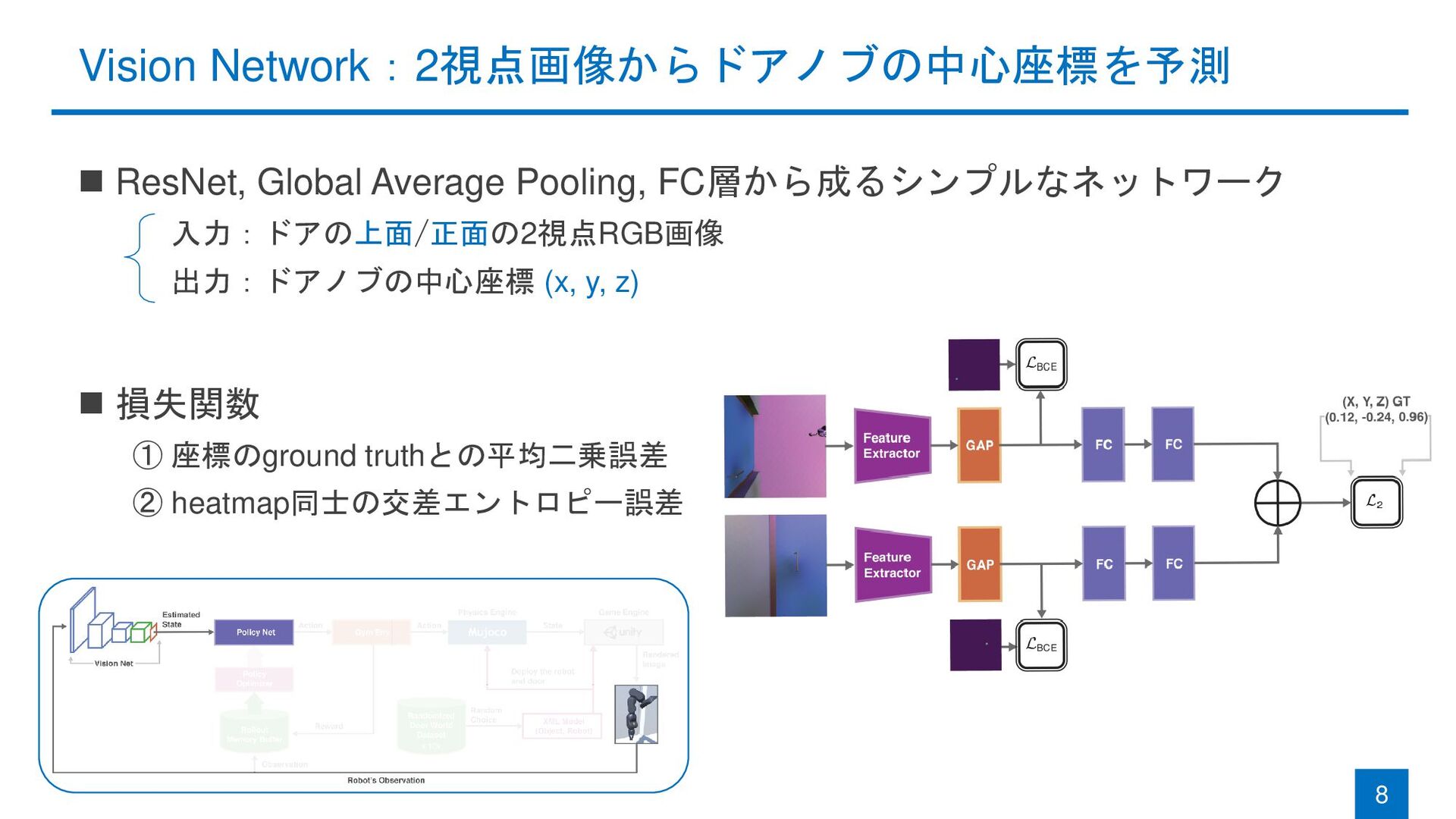
Vision Network:2視点画像からドアノブの中心座標を予測 ◼ ResNet, Global Average Pooling, FC層から成るシンプルなネットワーク 入力:ドアの上面/正面の2視点RGB画像 出力:ドアノブの中心座標
(x, y, z) ◼ 損失関数 ① 座標のground truthとの平均二乗誤差 ② heatmap同士の交差エントロピー誤差 8
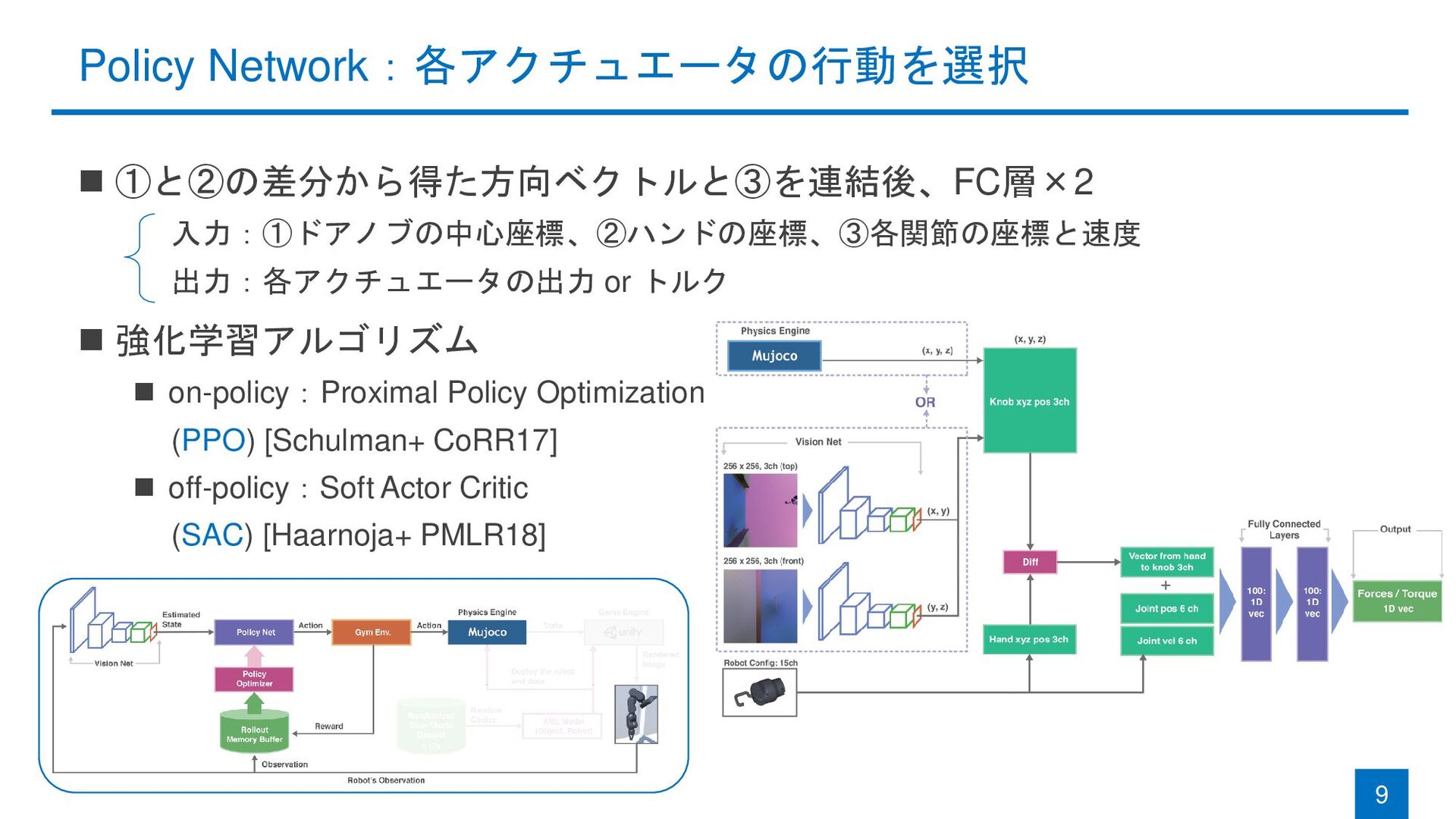
Policy Network:各アクチュエータの行動を選択 ◼ ①と②の差分から得た方向ベクトルと③を連結後、FC層×2 入力:①ドアノブの中心座標、②ハンドの座標、③各関節の座標と速度 出力:各アクチュエータの出力 or トルク ◼ 強化学習アルゴリズム
◼ on-policy:Proximal Policy Optimization (PPO) [Schulman+ CoRR17] ◼ off-policy:Soft Actor Critic (SAC) [Haarnoja+ PMLR18] 9
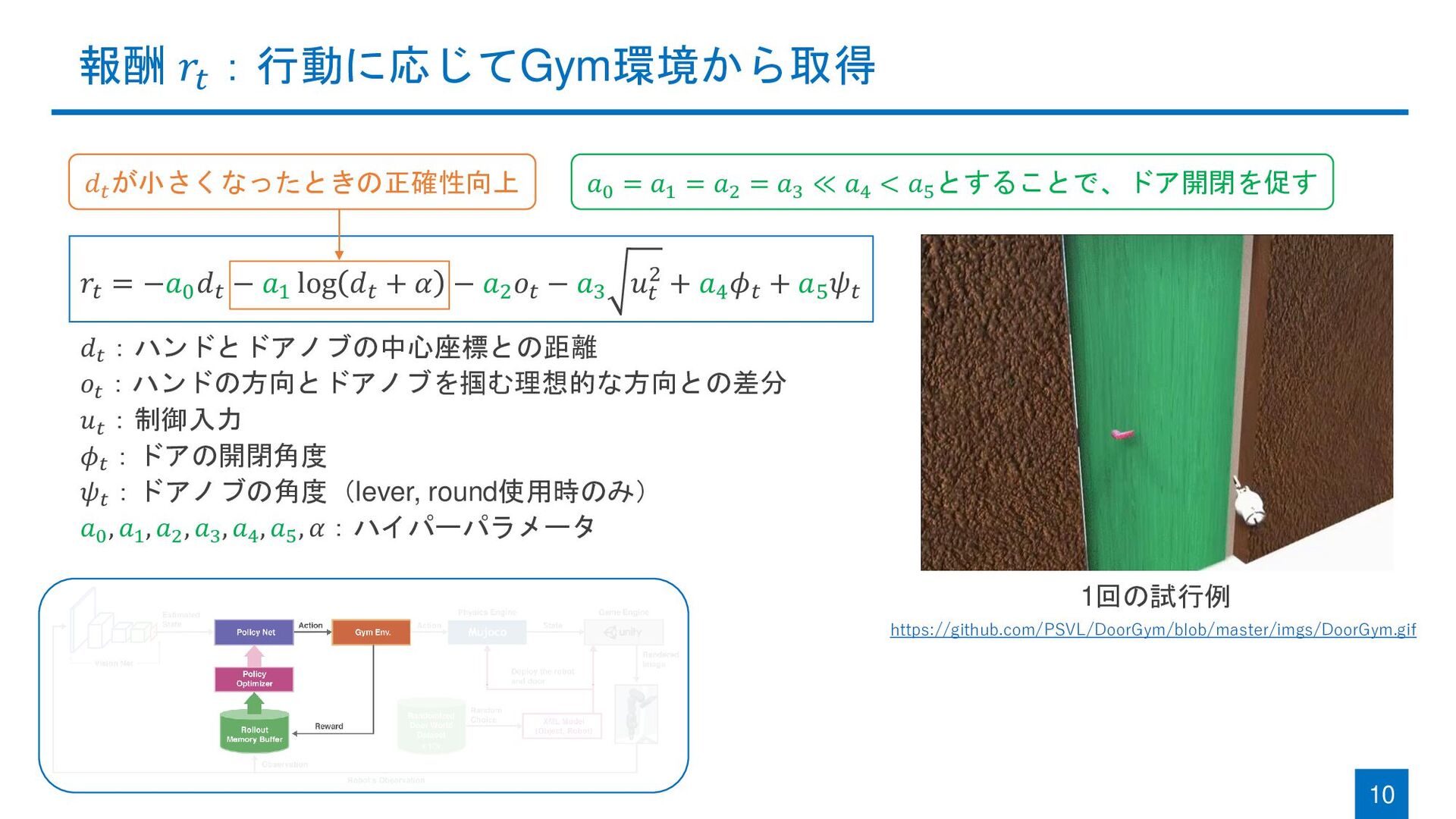
報酬 𝑟𝑡 :行動に応じてGym環境から取得 10 𝑟𝑡 = −𝑎0 𝑑𝑡 − 𝑎1
log 𝑑𝑡 + 𝛼 − 𝑎2 𝑜𝑡 − 𝑎3 𝑢𝑡 2 + 𝑎4 𝜙𝑡 + 𝑎5 𝜓𝑡 𝑑𝑡 :ハンドとドアノブの中心座標との距離 𝑜𝑡 :ハンドの方向とドアノブを掴む理想的な方向との差分 𝑢𝑡 :制御入力 𝜙𝑡 :ドアの開閉角度 𝜓𝑡 :ドアノブの角度(lever, round使用時のみ) 𝑎0 , 𝑎1 , 𝑎2 , 𝑎3 , 𝑎4 , 𝑎5 , 𝛼:ハイパーパラメータ 1回の試行例 https://github.com/PSVL/DoorGym/blob/master/imgs/DoorGym.gif 𝑑𝑡 が小さくなったときの正確性向上 𝑎0 = 𝑎1 = 𝑎2 = 𝑎3 ≪ 𝑎4 < 𝑎5 とすることで、ドア開閉を促す
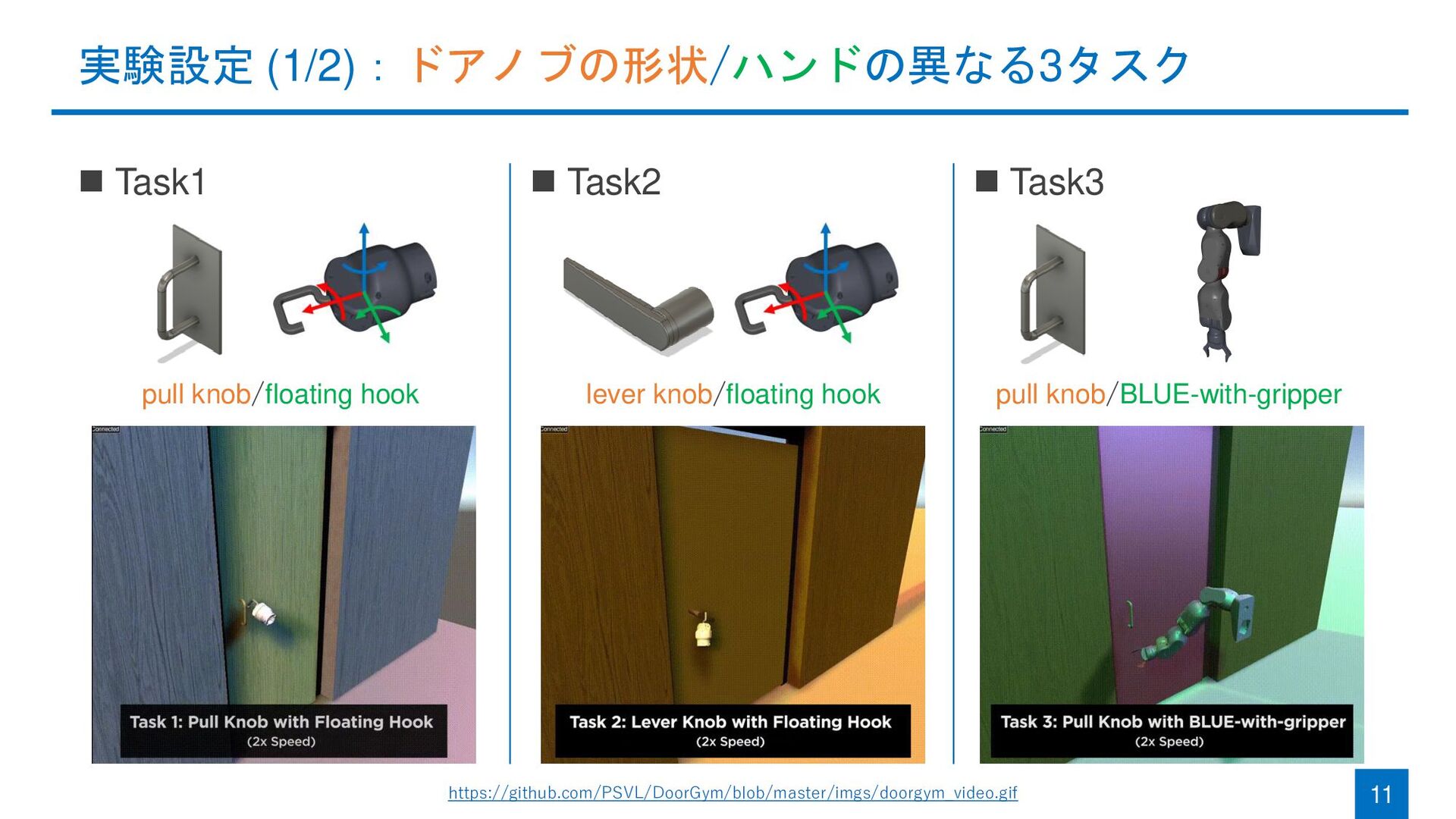
実験設定 (1/2):ドアノブの形状/ハンドの異なる3タスク ◼ Task1 11 https://github.com/PSVL/DoorGym/blob/master/imgs/doorgym_video.gif ◼ Task2 ◼ Task3
pull knob/floating hook lever knob/floating hook pull knob/BLUE-with-gripper
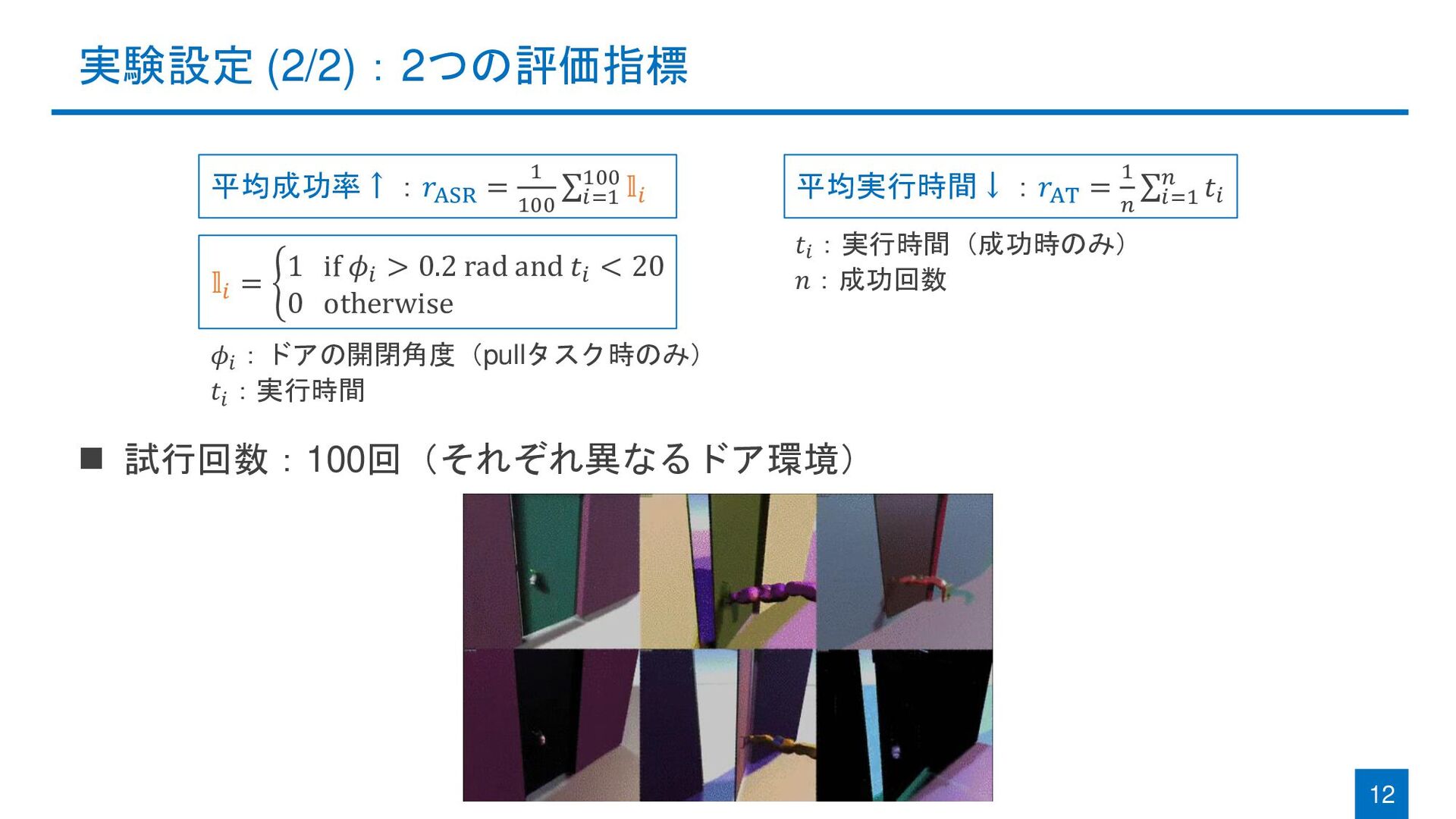
実験設定 (2/2):2つの評価指標 ◼ 試行回数:100回(それぞれ異なるドア環境) 12 平均成功率↑:𝑟ASR = 1 100 σ𝑖=1
100 𝕝𝑖 平均実行時間↓:𝑟AT = 1 𝑛 σ𝑖=1 𝑛 𝑡𝑖 𝑡𝑖 :実行時間(成功時のみ) 𝑛:成功回数 𝕝𝑖 = ቊ 1 if 𝜙𝑖 > 0.2 rad and 𝑡𝑖 < 20 0 otherwise 𝜙𝑖 :ドアの開閉角度(pullタスク時のみ) 𝑡𝑖 :実行時間
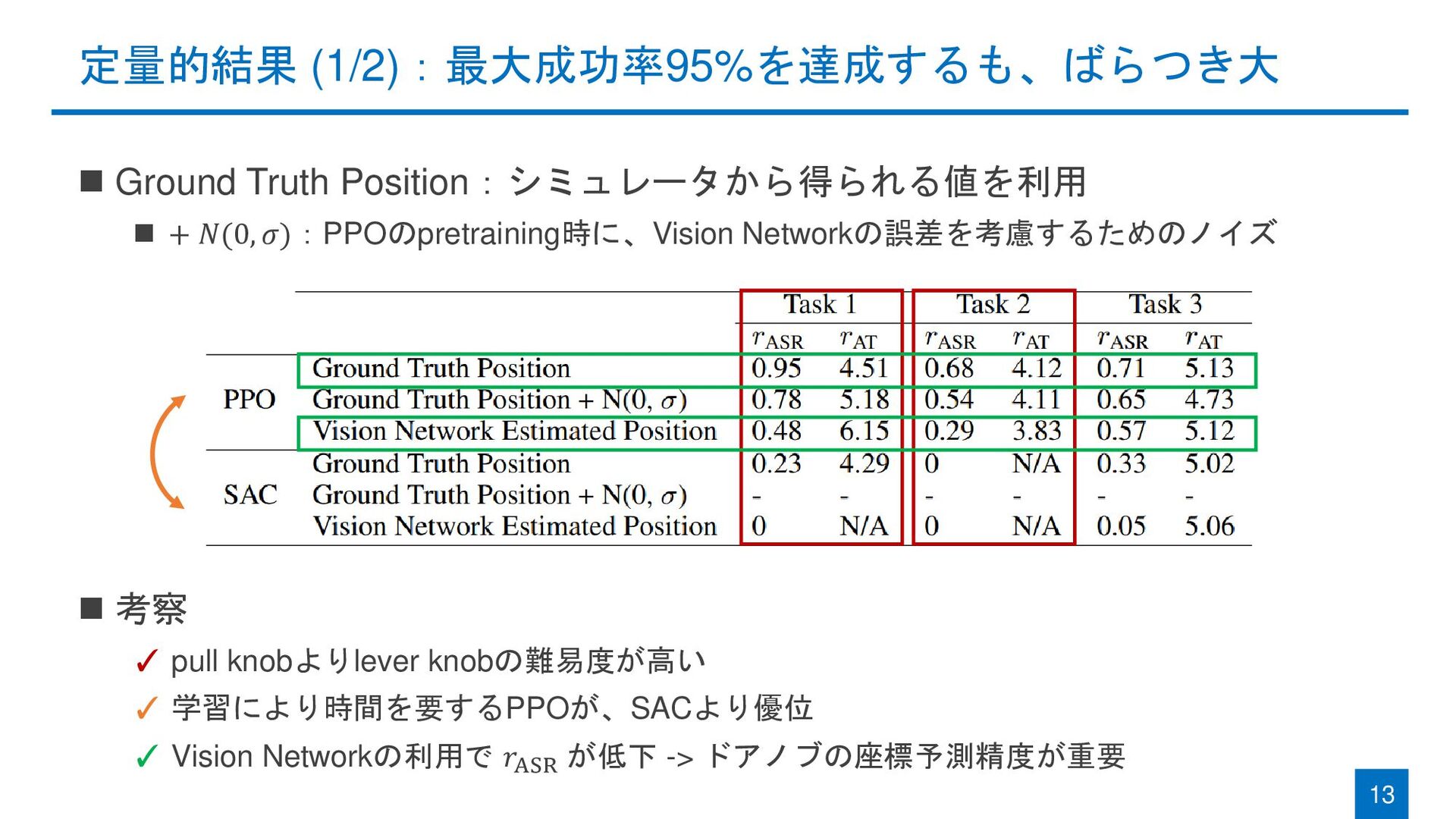
定量的結果 (1/2):最大成功率95%を達成するも、ばらつき大 ◼ Ground Truth Position:シミュレータから得られる値を利用 ◼ + 𝑁(0, 𝜎):PPOのpretraining時に、Vision
Networkの誤差を考慮するためのノイズ ◼ 考察 ✓ pull knobよりlever knobの難易度が高い ✓ 学習により時間を要するPPOが、SACより優位 ✓ Vision Networkの利用で 𝑟ASR が低下 -> ドアノブの座標予測精度が重要 13
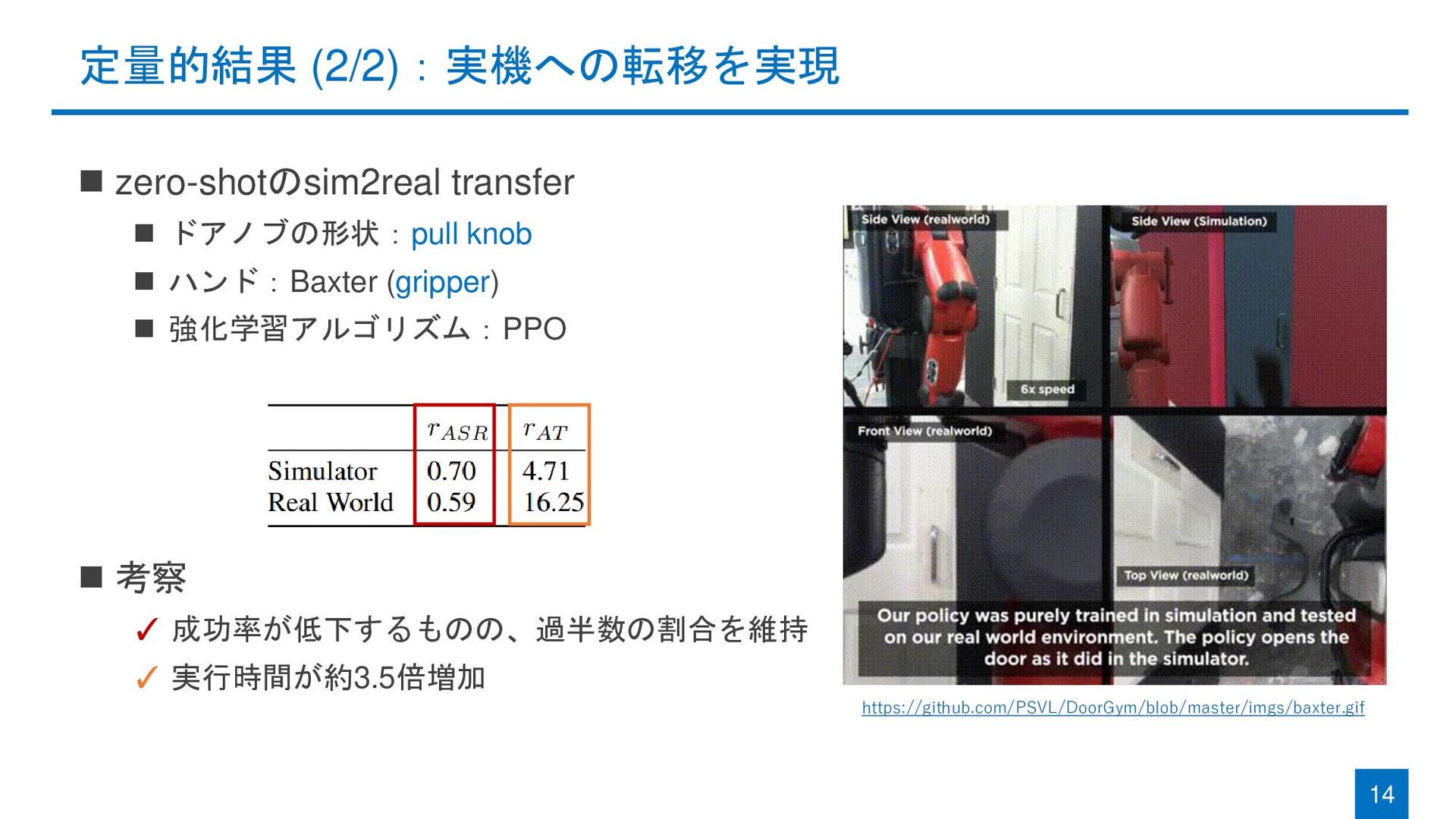
定量的結果 (2/2):実機への転移を実現 ◼ zero-shotのsim2real transfer ◼ ドアノブの形状:pull knob ◼ ハンド:Baxter
(gripper) ◼ 強化学習アルゴリズム:PPO ◼ 考察 ✓ 成功率が低下するものの、過半数の割合を維持 ✓ 実行時間が約3.5倍増加 14 https://github.com/PSVL/DoorGym/blob/master/imgs/baxter.gif
まとめ 背景 ✓ 「ドア開閉」は生活支援ロボットの基本スキル 提案 ✓ Domain Randomizationに対応したシミュレータ ✓ Unityを用いたphoto-realisticなレンダリング
✓ 強化学習(PPO, SAC)を用いたベースライン手法 結果 ✓ sim2real transferで一定の成功率を達成 15 https://github.com/PSVL/DoorGym/blob/master/imgs/DoorGym.gif
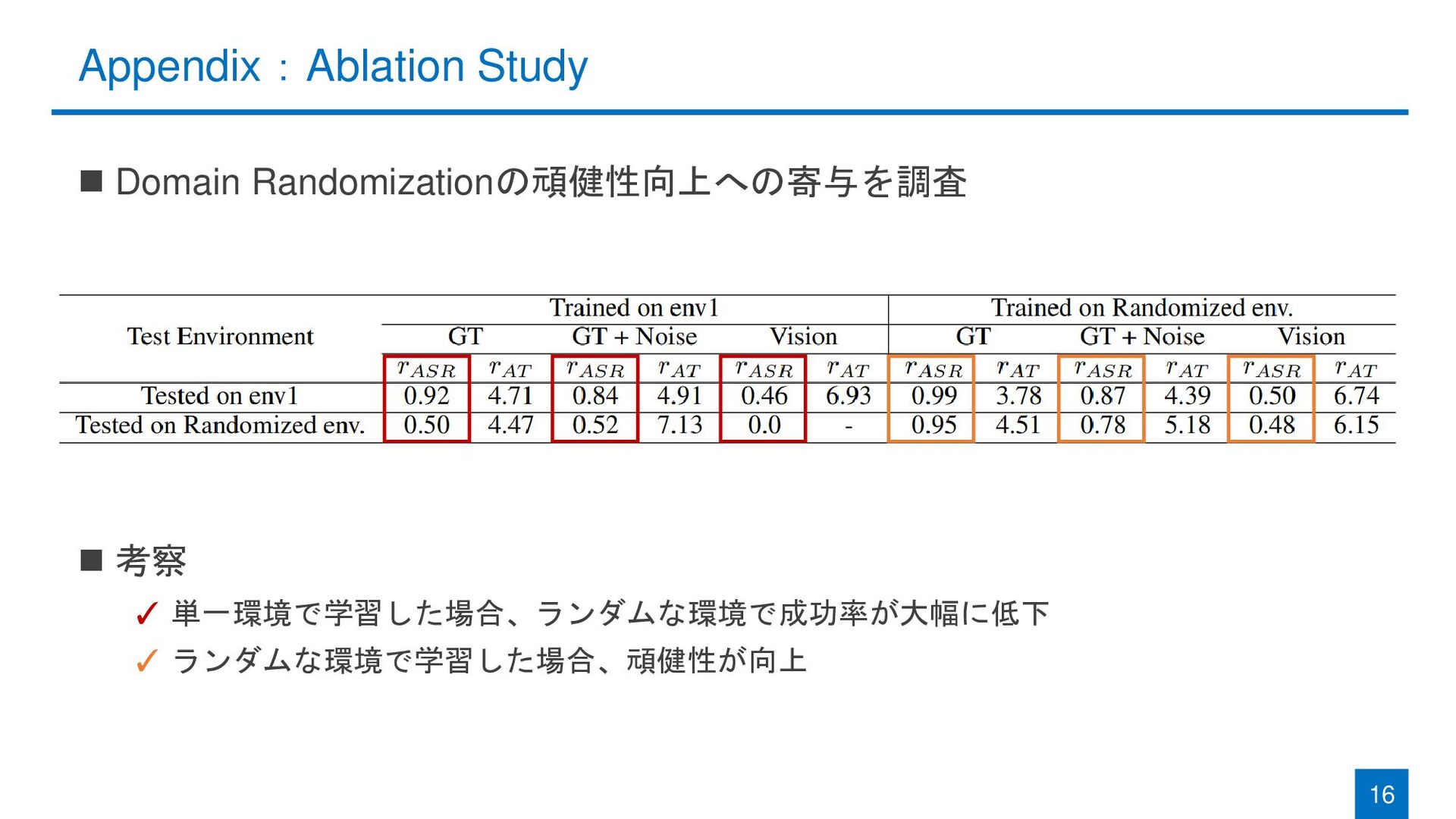
Appendix:Ablation Study ◼ Domain Randomizationの頑健性向上への寄与を調査 ◼ 考察 ✓ 単一環境で学習した場合、ランダムな環境で成功率が大幅に低下 ✓
ランダムな環境で学習した場合、頑健性が向上 16
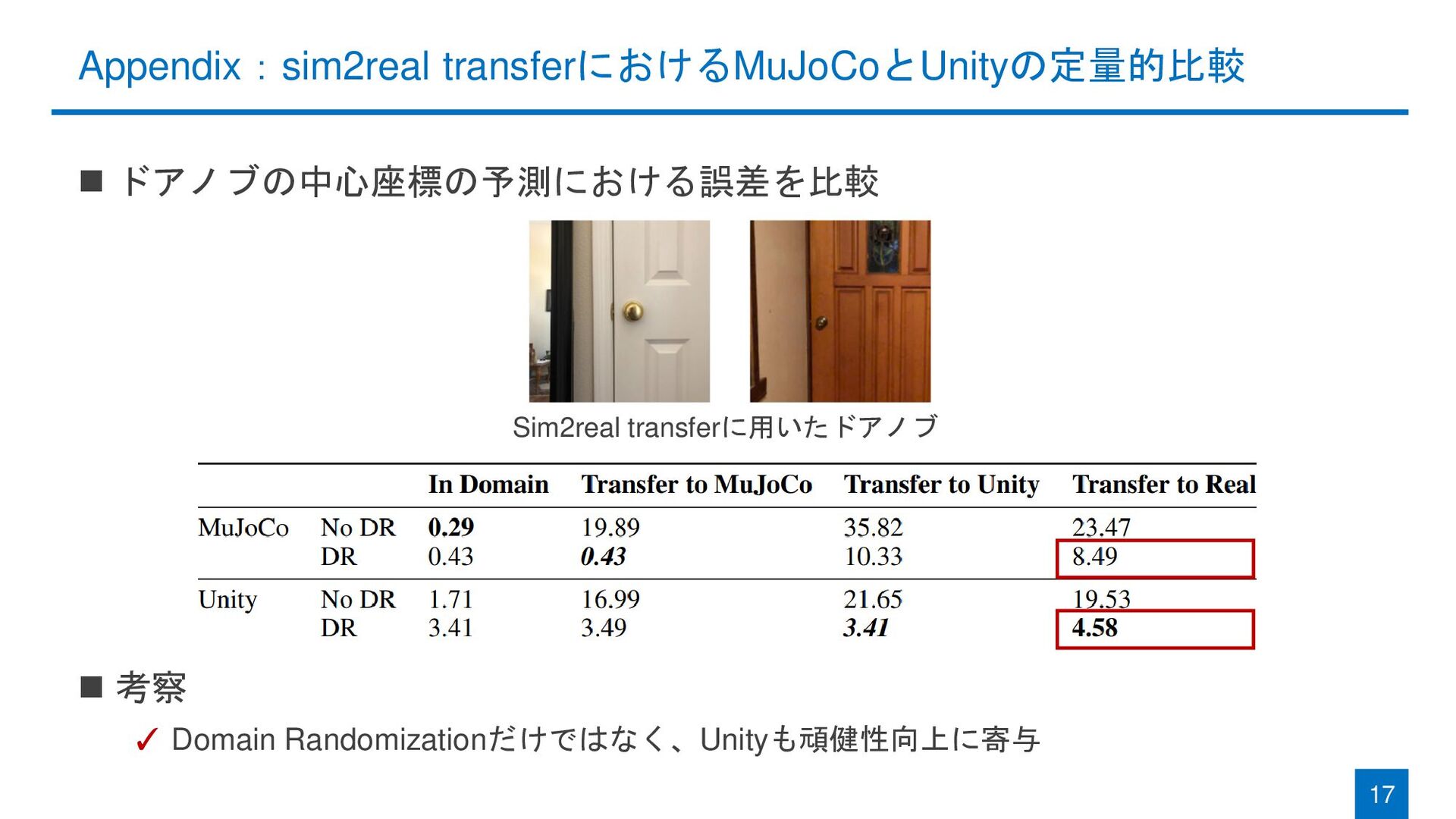
Appendix:sim2real transferにおけるMuJoCoとUnityの定量的比較 ◼ ドアノブの中心座標の予測における誤差を比較 ◼ 考察 ✓ Domain Randomizationだけではなく、Unityも頑健性向上に寄与 17
Sim2real transferに用いたドアノブ
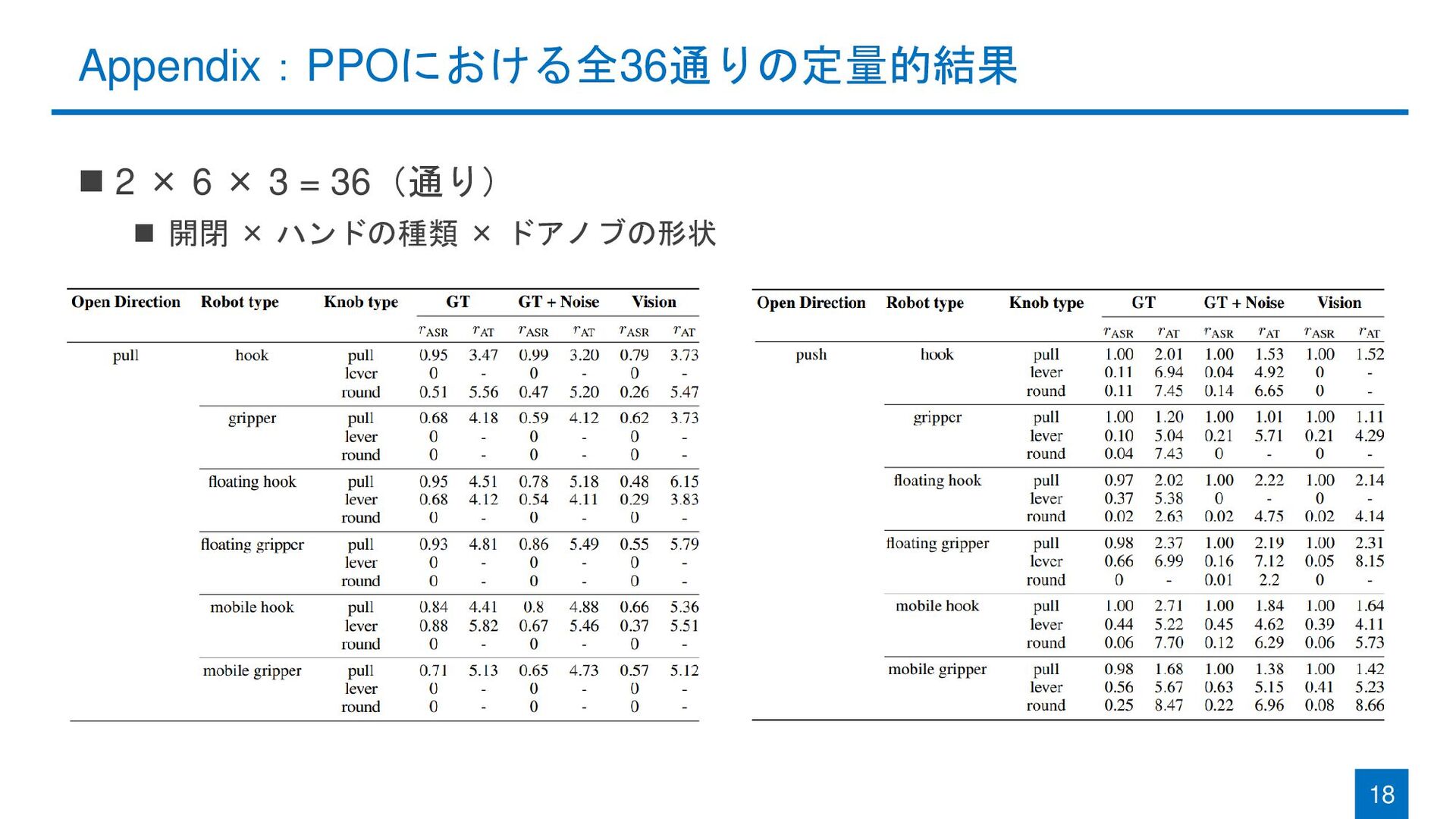
Appendix:PPOにおける全36通りの定量的結果 ◼ 2 × 6 × 3 = 36(通り) ◼
開閉 × ハンドの種類 × ドアノブの形状 18
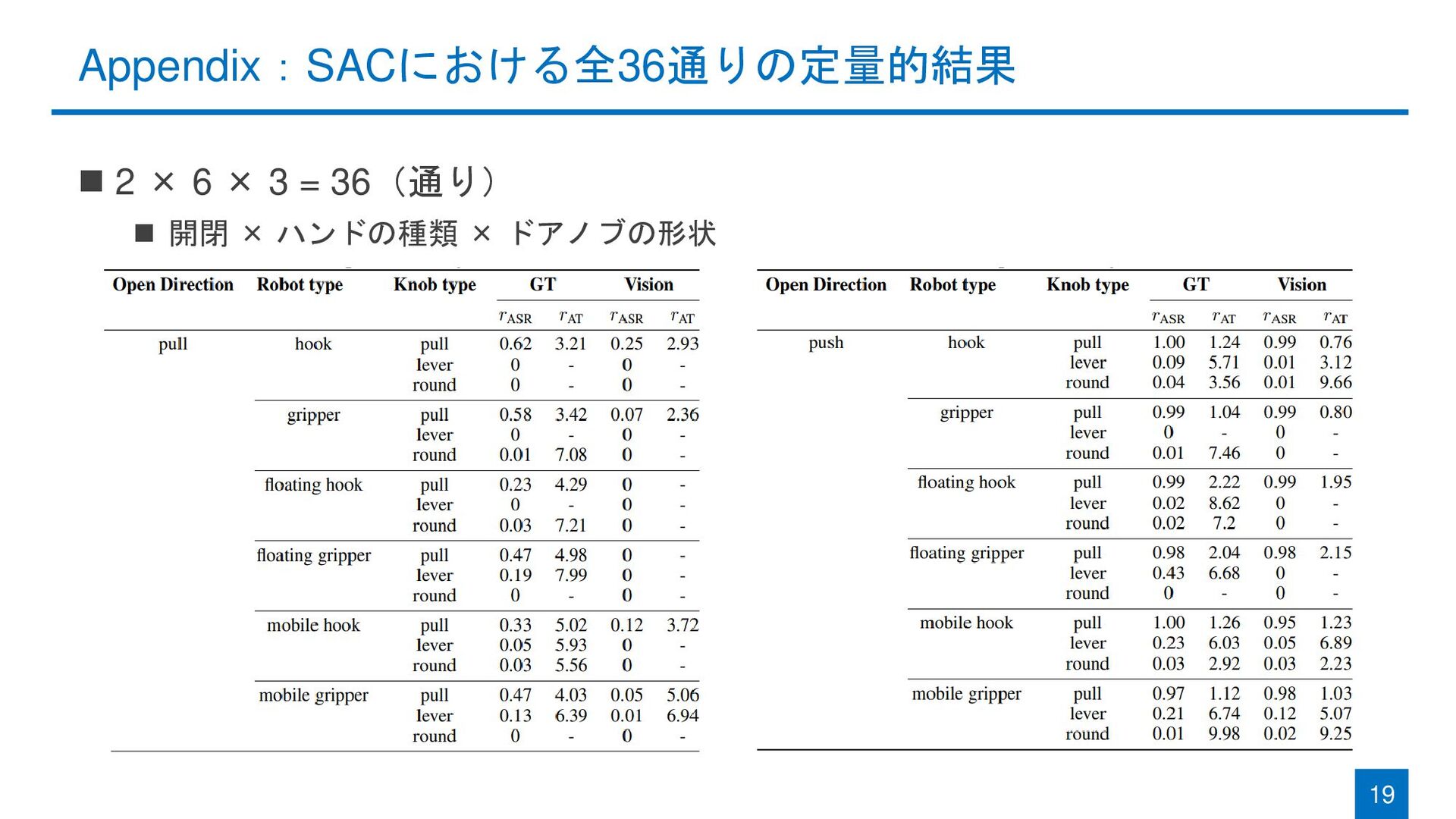
Appendix:SACにおける全36通りの定量的結果 19 ◼ 2 × 6 × 3 = 36(通り)
◼ 開閉 × ハンドの種類 × ドアノブの形状
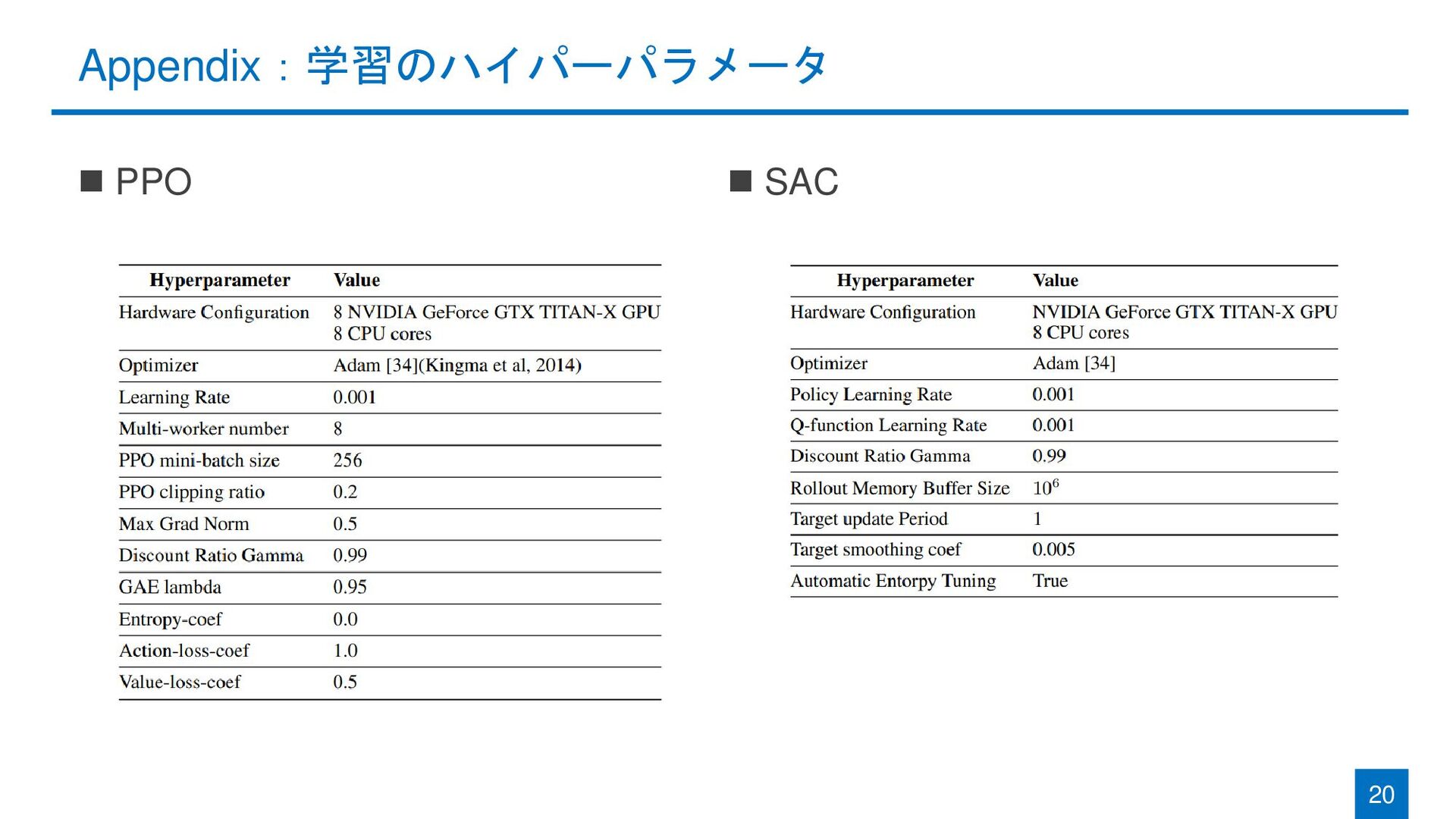
Appendix:学習のハイパーパラメータ ◼ PPO 20 ◼ SAC
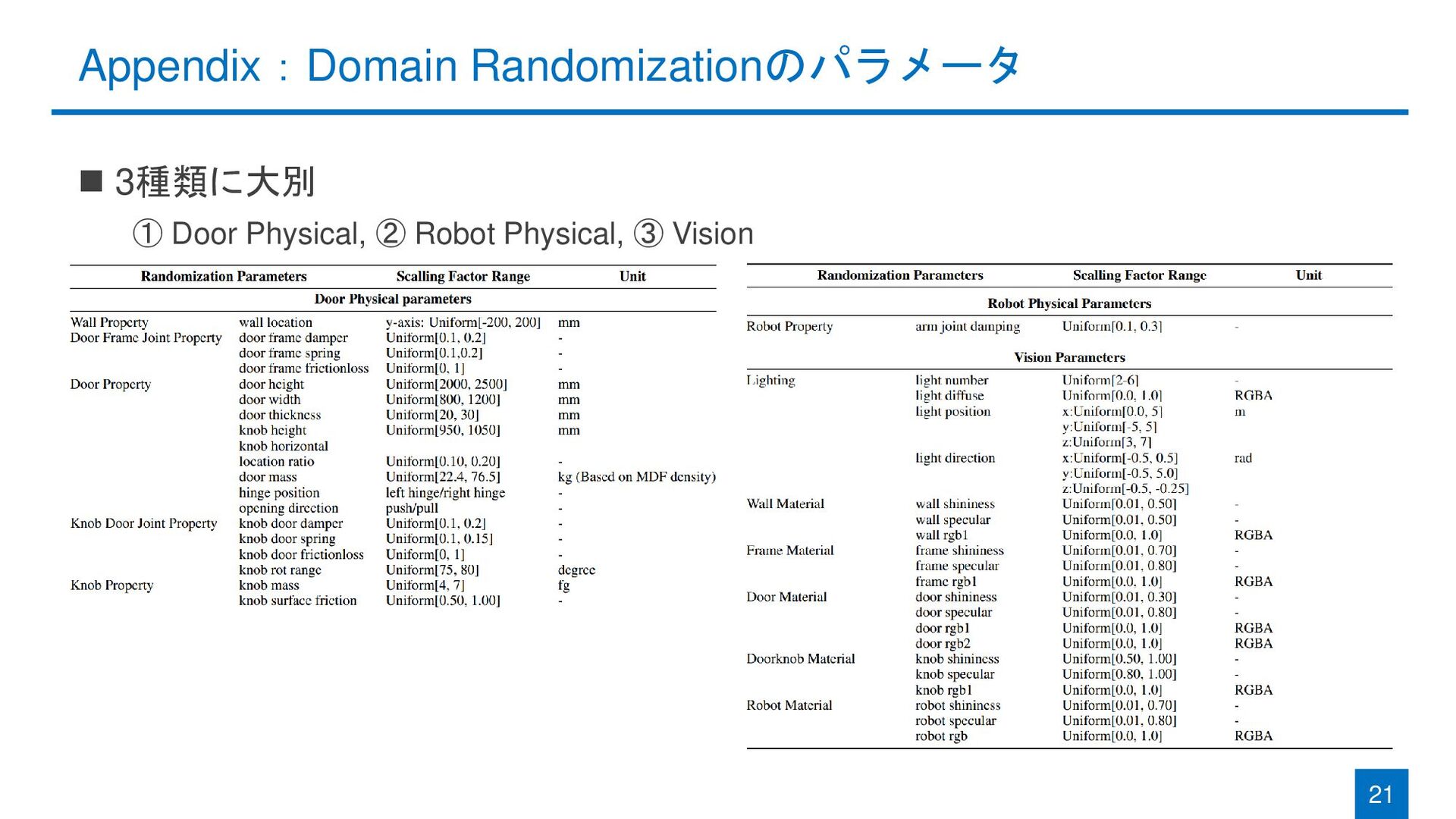
Appendix:Domain Randomizationのパラメータ ◼ 3種類に大別 ① Door Physical, ② Robot Physical,
③ Vision 21
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![提案手法:DoorGym ◼ Domain Randomizationに対応したドア開閉タスク用シミュレータ ◼ OpenAI Gym [Brockman+ 16] フレームワーク/Unity](https://files.speakerdeck.com/presentations/ebb7b8c222dd4ee880eb439fad66592d/slide_4.jpg){kind=link}
{kind=link}
![Unity Game Engine:レンダリング品質の向上 ◼ 実機への転移のため、よりphoto-realisticな影やテクスチャを実現 7 MuJoCo [Todorov+ IROS12] Unity](https://files.speakerdeck.com/presentations/ebb7b8c222dd4ee880eb439fad66592d/slide_6.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}