and the stuffed bear hard because robot tried to put the hourglass where they are. タスク 手法 概要 動画キャプション生成 MART [Lei+, ACL20] Memory Updaterモジュールにより 過去の動画情報を利用 future captioning [Mori+, IEEE IV21] 自動運転において,過去の動画情報 とセンサ情報を利用 RFCM [Kambara+, ICIP22] 各時刻のイベント間の関係性を抽出 5
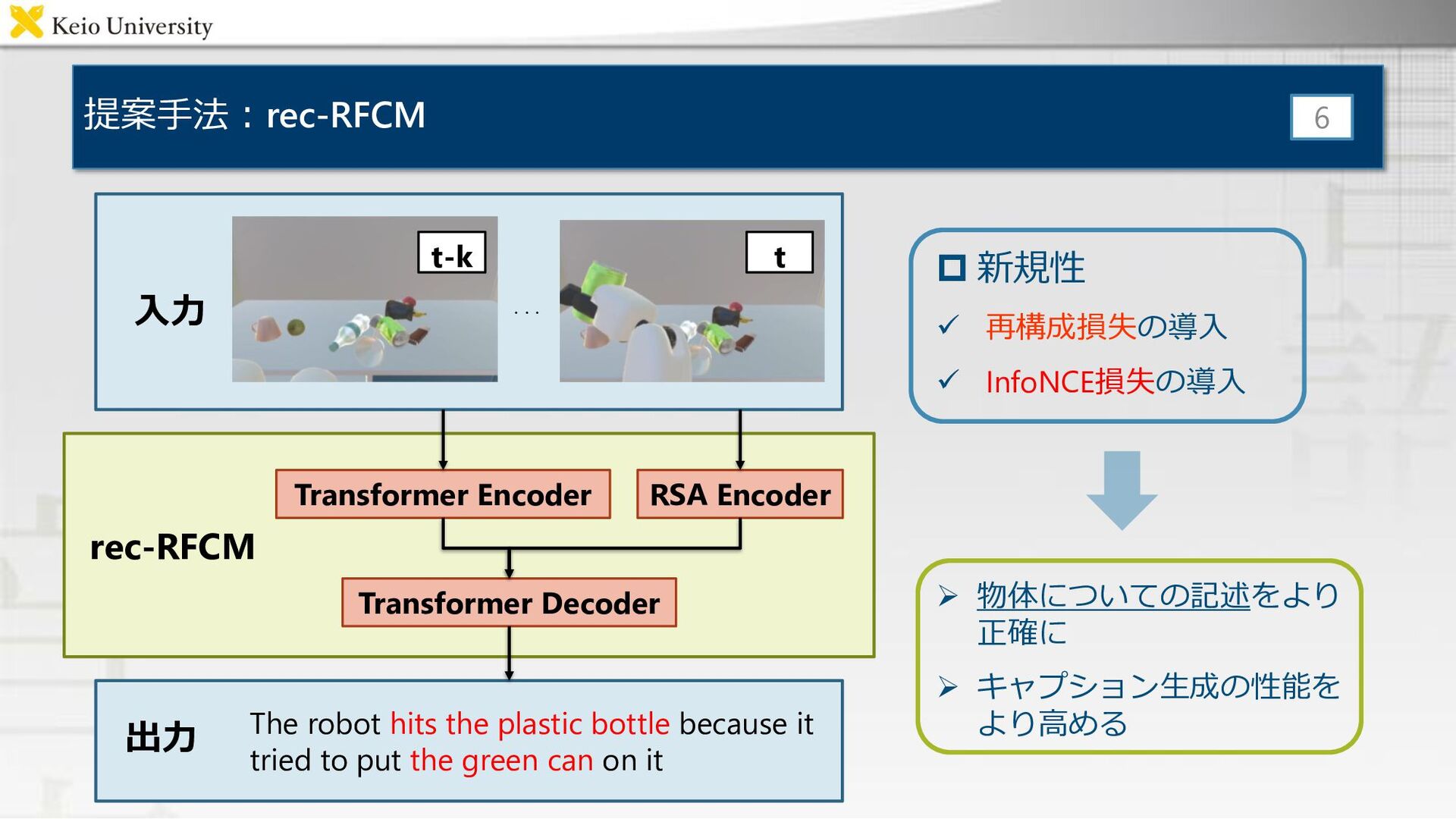
正確に ➢ キャプション生成の性能を より高める ・・・ 入力 Transformer Encoder Transformer Decoder RSA Encoder rec-RFCM 出力 The robot hits the plastic bottle because it tried to put the green can on it t t-k
train:1000 samples,validation:100 samples,test:100 samples • 入力:衝突前までの0.2秒ごとのフレーム • 出力:これから起こる衝突の予測文 11 robot hits the black teapot hard because robot tried to put an apple on it
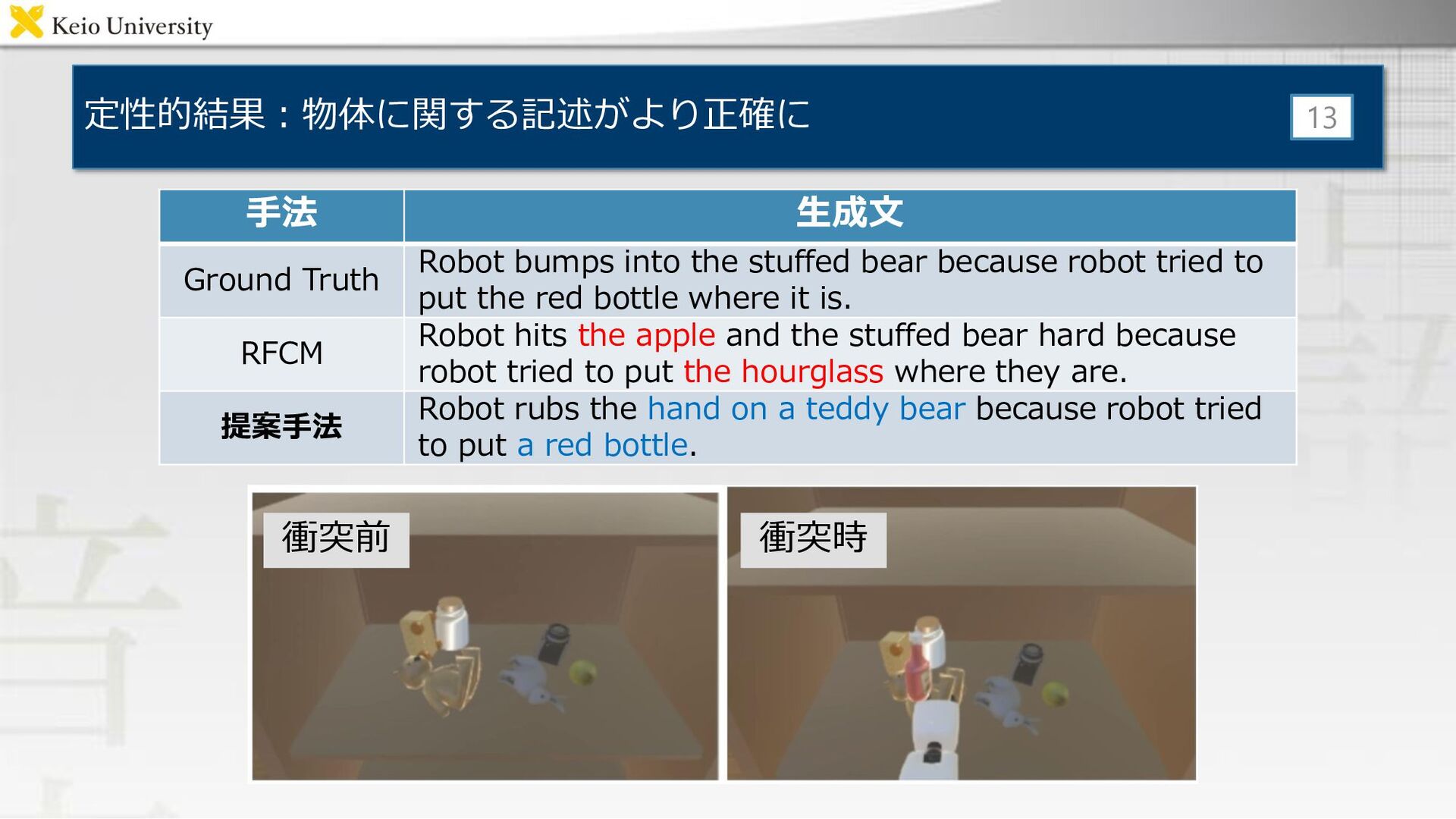
stuffed bear because robot tried to put the red bottle where it is. RFCM Robot hits the apple and the stuffed bear hard because robot tried to put the hourglass where they are. 提案手法 Robot rubs the hand on a teddy bear because robot tried to put a red bottle. 衝突前 衝突時
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![関連研究:将来イベントにおける物体の記述が不十分 入力 将来 RFCM [Kambara+ ICIP22] Robot hits the apple](https://files.speakerdeck.com/presentations/c1bb1057388642f9ba337b38cc67af68/slide_4.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![構造(3 / 4):Transformer Encoder / Decoder • Transformer [Vaswani+, NeurIPS17]の構造を採用](https://files.speakerdeck.com/presentations/c1bb1057388642f9ba337b38cc67af68/slide_8.jpg){kind=link}
{kind=link}
![実験設定:物体配置タスク データセット • BILA-Captionデータセット[Kambara+, ICIP22] • 生活支援ロボットによる物体配置タスクにおける,衝突の危険性についての説明文 を付与 •](https://files.speakerdeck.com/presentations/c1bb1057388642f9ba337b38cc67af68/slide_10.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}