Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
researchContentsForB4
Search
k-hasegw
April 24, 2023
Programming
120
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
researchContentsForB4
k-hasegw
April 24, 2023
More Decks by k-hasegw
See All by k-hasegw
progressReport_k-hasegw_20230220.pdf
khasegw0831
0
120
progressReport_k-hasegw_20230131.pdf
khasegw0831
0
360
progressReport_k-hasegw_20230117
khasegw0831
0
390
f-sync_algo
khasegw0831
0
260
Other Decks in Programming
See All in Programming
壊れたパーサから始める関数型設計と構成的なパーサ #fp_matsuri
raiga0310
2
400
Built Our Own Background Agent at LayerX #aidevex_findy
layerx
PRO
9
3.5k
えっ!!コードを読まずに開発を!?
hananouchi
0
270
Embedded SREと共に達成した会員管理システムのAWS移行 - SRE NEXT 2026 ランチスポンサーセッション
niftycorp
PRO
1
3.1k
GDG Korea Android: 2026 I/O Extended ~ What's new in Android development tools
pluu
0
180
20260722_microCMSで考える、AI時代のコンテンツ運用設計
yosh1
0
120
初めてのKubernetes 本番運用でハマった話
oku053
0
130
【やさしく解説 設計編 #1】「ドメイン駆動」と「実装駆動」ってなに? 〜設計の考え方を、たとえ話で学ぼう〜
panda728
PRO
1
140
Generative UI & AI-Assistants for Your Angular Solutions
manfredsteyer
PRO
1
230
使用 Meilisearch 建立新聞搜尋工具
johnroyer
0
180
AI時代、エンジニアはどう育つのか -未経験エンジニアの成長を間近で見て考えたこと-
thasu0123
0
180
Go言語とトイモデルで学ぶTransformerの気持ち / fukuokago23-transformer
monochromegane
0
140
Featured
See All Featured
Test your architecture with Archunit
thirion
1
2.3k
Why Mistakes Are the Best Teachers: Turning Failure into a Pathway for Growth
auna
0
190
Building a Modern Day E-commerce SEO Strategy
aleyda
45
9.1k
Large-scale JavaScript Application Architecture
addyosmani
515
110k
DevOps and Value Stream Thinking: Enabling flow, efficiency and business value
helenjbeal
1
270
The Hidden Cost of Media on the Web [PixelPalooza 2025]
tammyeverts
2
390
Designing for Performance
lara
611
70k
How GitHub (no longer) Works
holman
316
150k
What the history of the web can teach us about the future of AI
inesmontani
PRO
1
640
Raft: Consensus for Rubyists
vanstee
141
7.6k
技術選定の審美眼(2025年版) / Understanding the Spiral of Technologies 2025 edition
twada
PRO
118
120k
Visual Storytelling: How to be a Superhuman Communicator
reverentgeek
2
600
Transcript
MASUZAWA LABORATORY – ALGORITHM DESIGN LABORATORY (http://www-masu.ist.osaka-u.ac.jp) Department of Computer
Science, Graduate School of Information Science and Technology, Osaka University. 視野に欠損のある モバイルロボット群の アルゴリズム 増澤研究室 M1 長谷川 和輝
1 モバイルロボット 人に代わって仕事をするロボット 掃除ができるルンバ 配膳ができるBellaBot 複数台ロボットの分散制御 個々が同時並行でプログラムを自律的に実行 互いをセンサで観測して協調動作 ロボットによる倉庫整理 ドローンアート
2 従来のモバイルロボット群モデル 他の全ロボットを観測できることを前提 視野が限定された研究が少ない 実機では全ロボットの観測は困難 観測用センサーの実装コストの高さ 障害物による観測の妨害 故障時に完全に停止してしまうリスク
3 研究概要 目的 視野の欠損したロボット群を制御する アルゴリズムの考案 研究計画 1次元モデルを考える ロボット均一配置問題 1次元モデルを2次元へ拡張 最近接の1体のみ見えるケース
最遠隔の1体のみ見えないケース k体のロボットが見える,見えないケースに拡張
ロボット均一配置問題
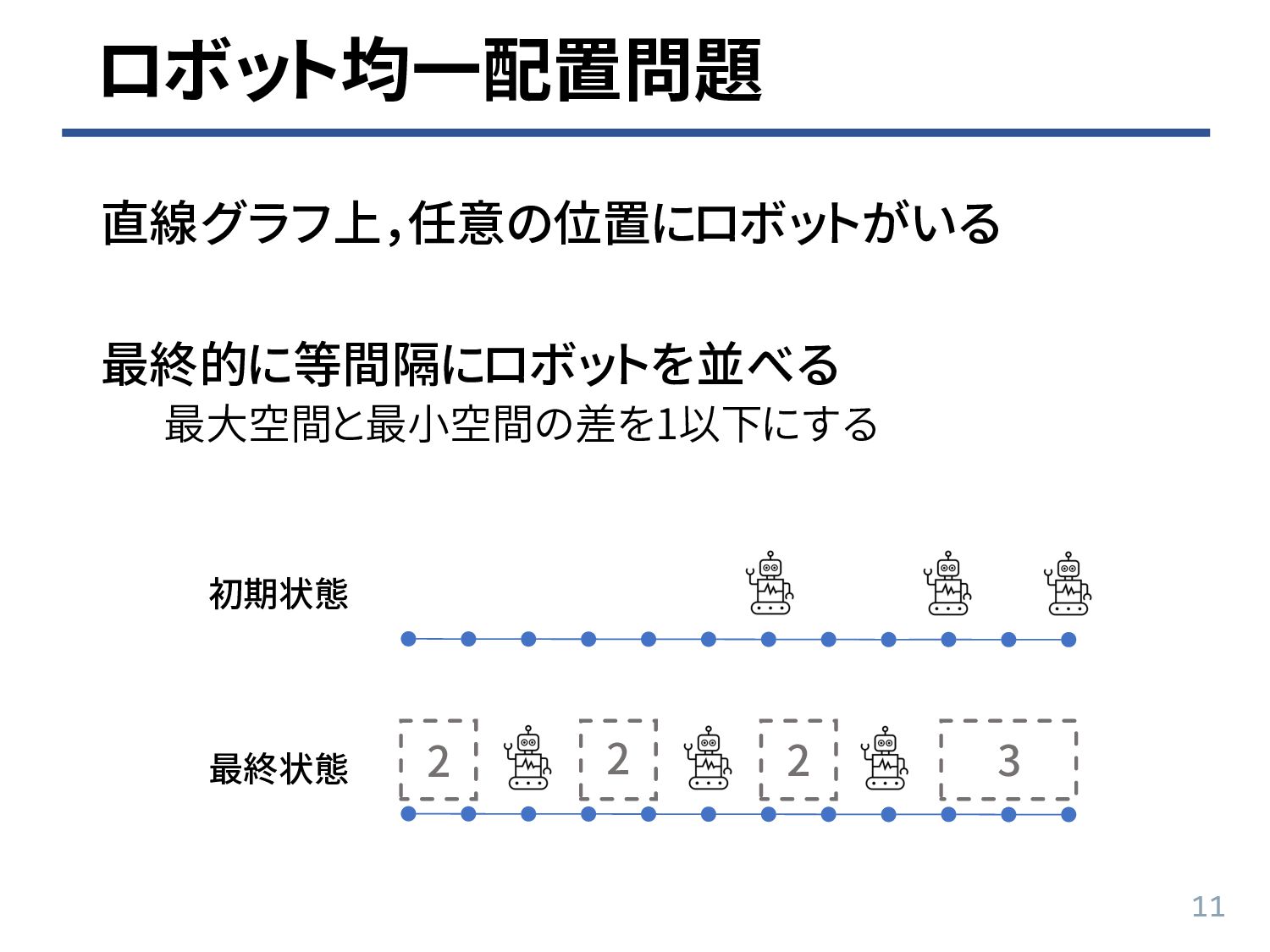
11 ロボット均一配置問題 直線グラフ上,任意の位置にロボットがいる 最終的に等間隔にロボットを並べる 最大空間と最小空間の差を1以下にする 初期状態 最終状態 2 2 2
3
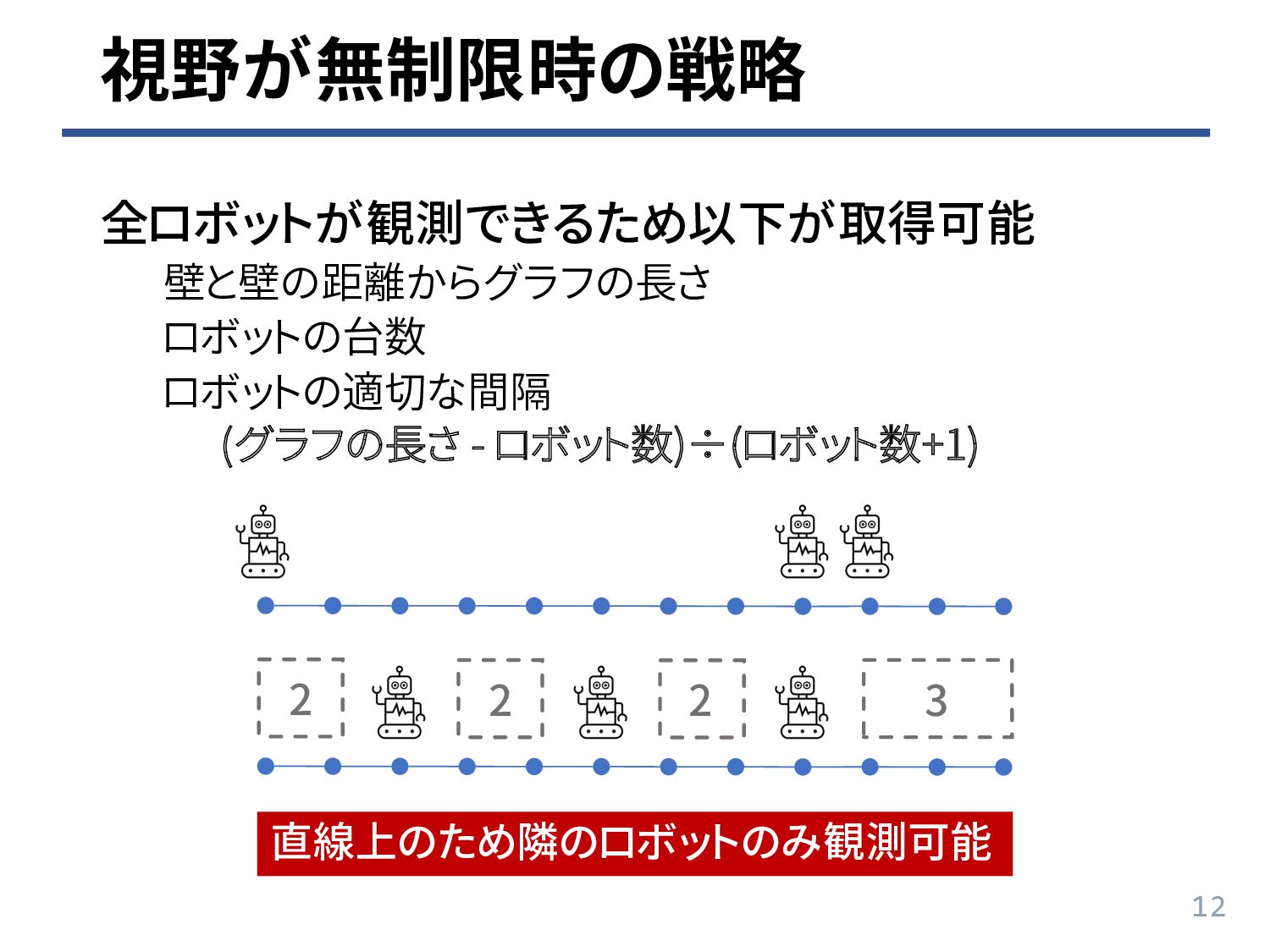
12 視野が無制限時の戦略 全ロボットが観測できるため以下が取得可能 壁と壁の距離からグラフの長さ ロボットの台数 ロボットの適切な間隔 (グラフの長さ - ロボット数)÷(ロボット数+1) 直線上のため隣のロボットのみ観測可能
2 2 2 3
13 視野制限下でのナイーブな戦略 アイデア 左右間隔が等しいことが理想 最大空間と最小空間の差が1の場合も許容 左右の差が2以上であれば差を縮めたい LCMサイクル 1. 左右をLook 2.
左右の差により移動先をCompute 差が2以上:大きい方の間隔を1縮める 差が1以下:動かない 3. Computeに応じてMove
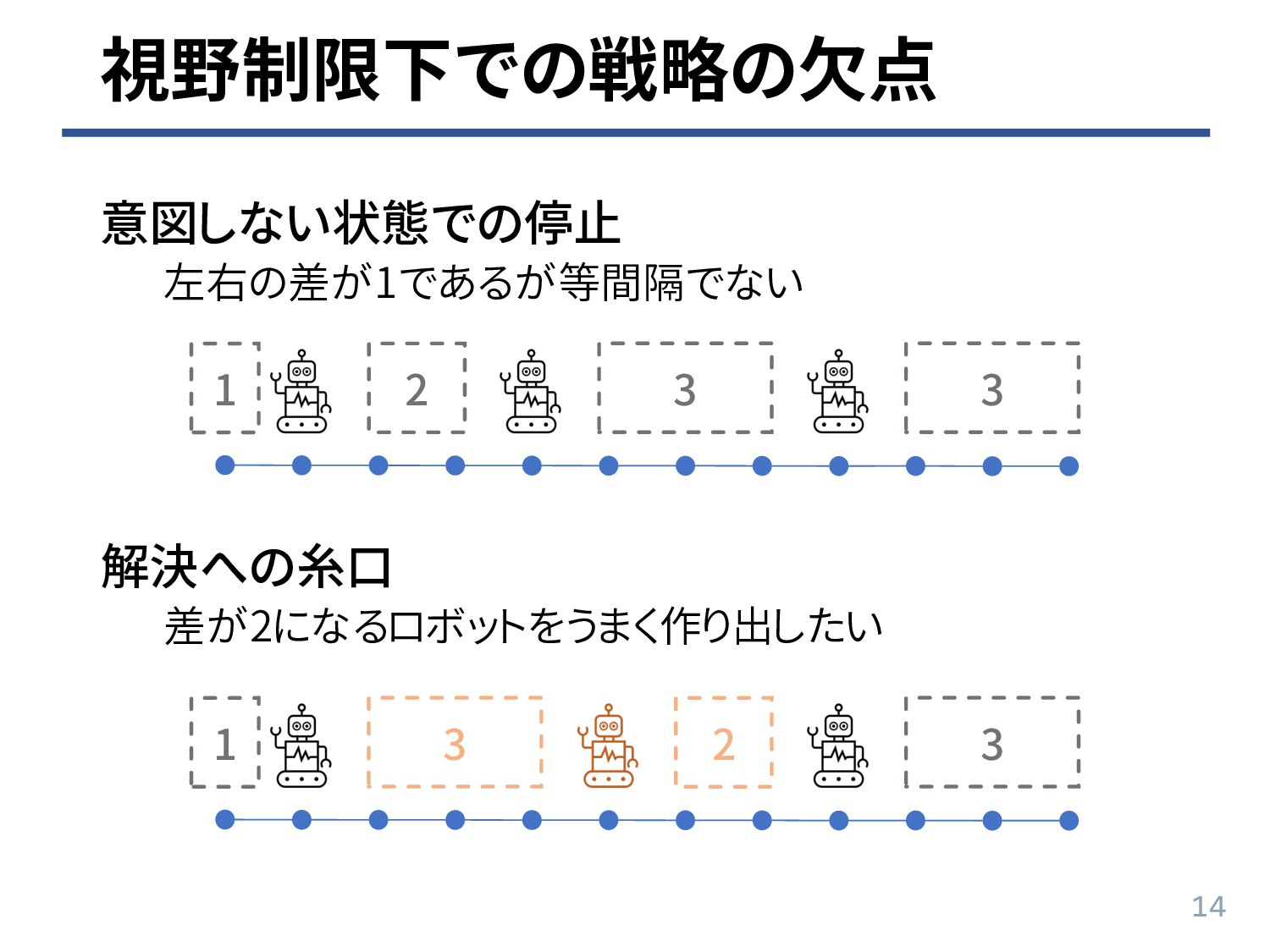
14 視野制限下での戦略の欠点 意図しない状態での停止 左右の差が1であるが等間隔でない 解決への糸口 差が2になるロボットをうまく作り出したい 2 1 3 3
2 1 3 3
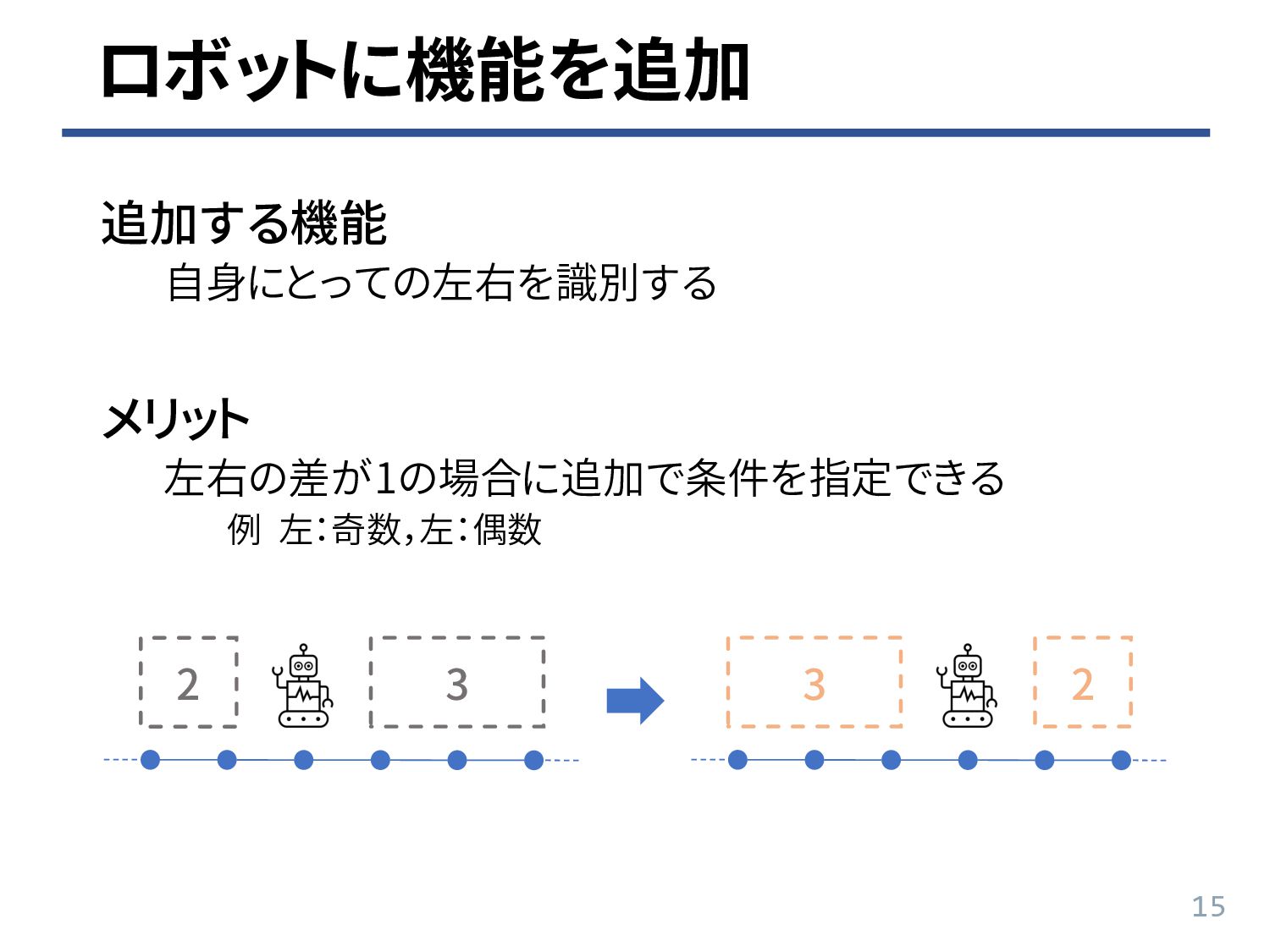
15 ロボットに機能を追加 追加する機能 自身にとっての左右を識別する メリット 左右の差が1の場合に追加で条件を指定できる 例 左:奇数,左:偶数 2 3
2 3
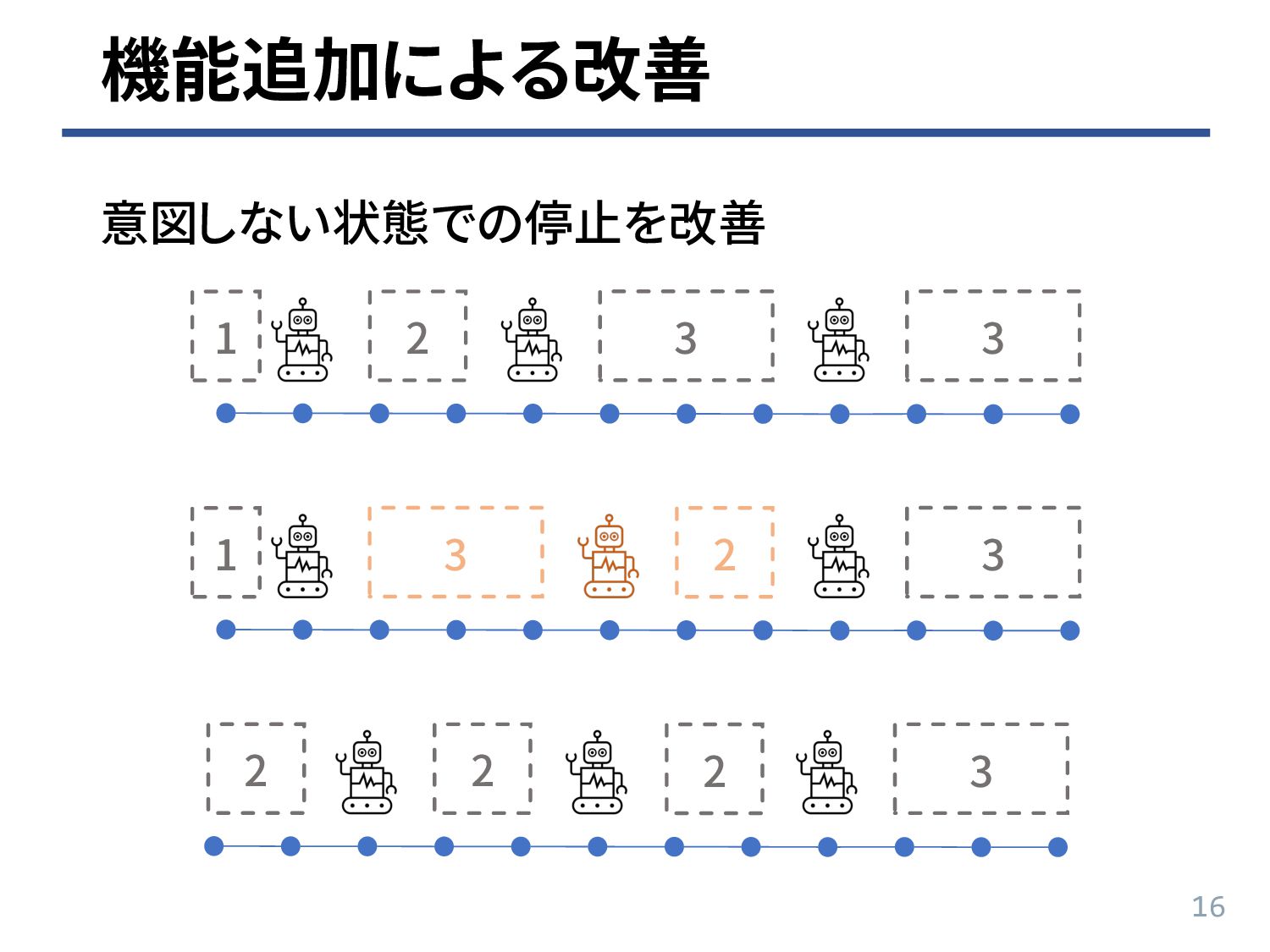
16 機能追加による改善 意図しない状態での停止を改善 2 1 3 3 2 1 3
3 2 3 2 2
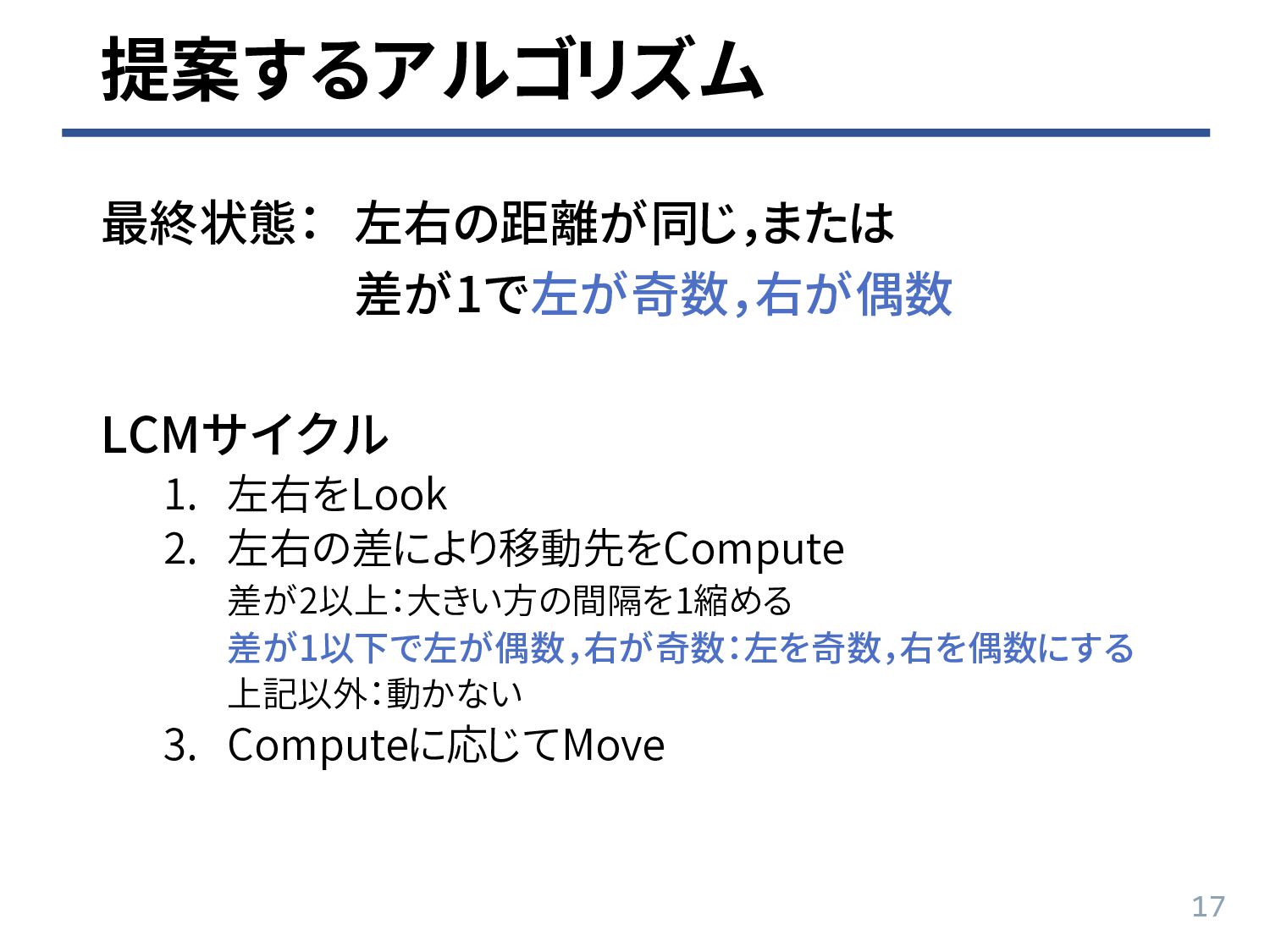
17 提案するアルゴリズム 最終状態: 左右の距離が同じ,または 差が1で左が奇数,右が偶数 LCMサイクル 1. 左右をLook 2. 左右の差により移動先をCompute
差が2以上:大きい方の間隔を1縮める 差が1以下で左が偶数,右が奇数:左を奇数,右を偶数にする 上記以外:動かない 3. Computeに応じてMove
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}