Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
f-sync_algo
Search
k-hasegw
November 22, 2022
Programming
260
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
f-sync_algo
k-hasegw
November 22, 2022
More Decks by k-hasegw
See All by k-hasegw
researchContentsForB4
khasegw0831
0
120
progressReport_k-hasegw_20230220.pdf
khasegw0831
0
120
progressReport_k-hasegw_20230131.pdf
khasegw0831
0
360
progressReport_k-hasegw_20230117
khasegw0831
0
390
Other Decks in Programming
See All in Programming
はてなアカウント基盤 State of the Union
cockscomb
1
1.3k
Prismを使った型安全な暗号化_関数型まつり2026
_fhhmm
0
150
琵琶湖の水は止められてもNet--HTTPのリトライは止められない / You might be able to stop the water flow of Lake Biwa but you can't stop Net::HTTP retries
luccafort
PRO
0
450
Laravelで学ぶ Webアプリケーションチューニング入門/web_application_tuning_101
hanhan1978
4
1.3k
php-fpmのプロセスが枯渇した日-調査・対処・そして本当にやるべきだったこと-
shibuchaaaan
0
150
Claude Opus 4.6以後の受託開発エンジニアの変化(Claude Code開発ノウハウ大公開スペシャルbyクラスメソッド)
iidatakuma
1
880
ここ半年くらいでAIに作らせたR用ツール
eitsupi
0
290
AIが無かった頃の素敵な出会いの話
codmoninc
1
240
Apache Hive: そしてCloud Native Lakehouseへ
okumin
1
170
JAWS-UG横浜 #102 AWSサ終供養LT会 成仏できない AWS サービスたち 〜本日、三体供養します〜
maroon1st
0
240
[RVD26] Vibe Architecture en 2040 : Darwin a-t-il (enfin) eu raison des architectes ?
alexandretouret
0
100
なぜ関数型プログラミングで「型」と「証明」が語られるのか #fp_matsuri
kajitack
3
1k
Featured
See All Featured
The Illustrated Guide to Node.js - THAT Conference 2024
reverentgeek
1
410
Gemini Prompt Engineering: Practical Techniques for Tangible AI Outcomes
mfonobong
2
470
Utilizing Notion as your number one productivity tool
mfonobong
4
470
We Have a Design System, Now What?
morganepeng
55
8.2k
The B2B funnel & how to create a winning content strategy
katarinadahlin
PRO
1
430
How To Speak Unicorn (iThemes Webinar)
marktimemedia
1
510
Everyday Curiosity
cassininazir
0
260
Neural Spatial Audio Processing for Sound Field Analysis and Control
skoyamalab
0
390
Being A Developer After 40
akosma
91
590k
Typedesign – Prime Four
hannesfritz
42
3.1k
Joys of Absence: A Defence of Solitary Play
codingconduct
1
420
sira's awesome portfolio website redesign presentation
elsirapls
0
310
Transcript
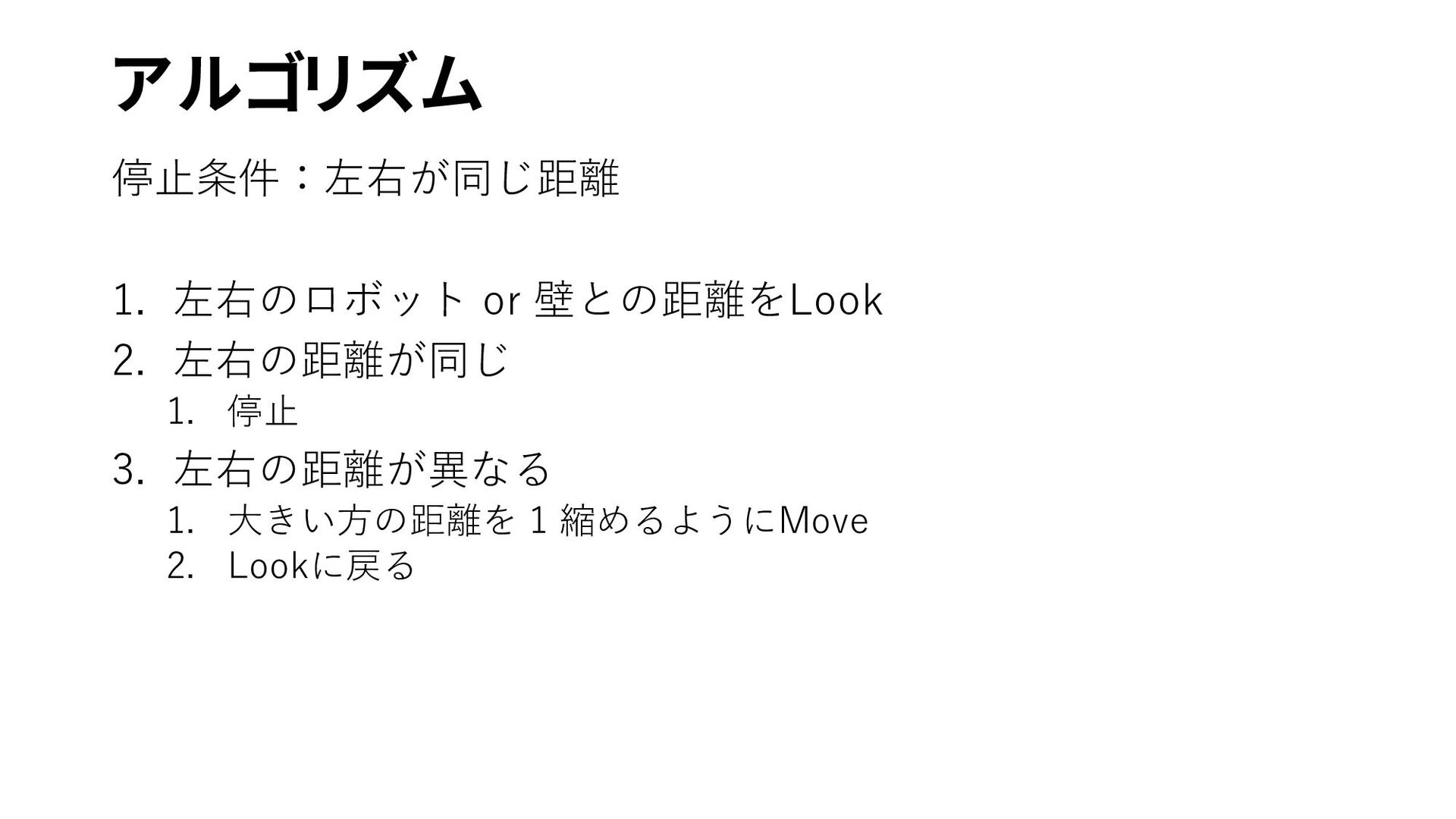
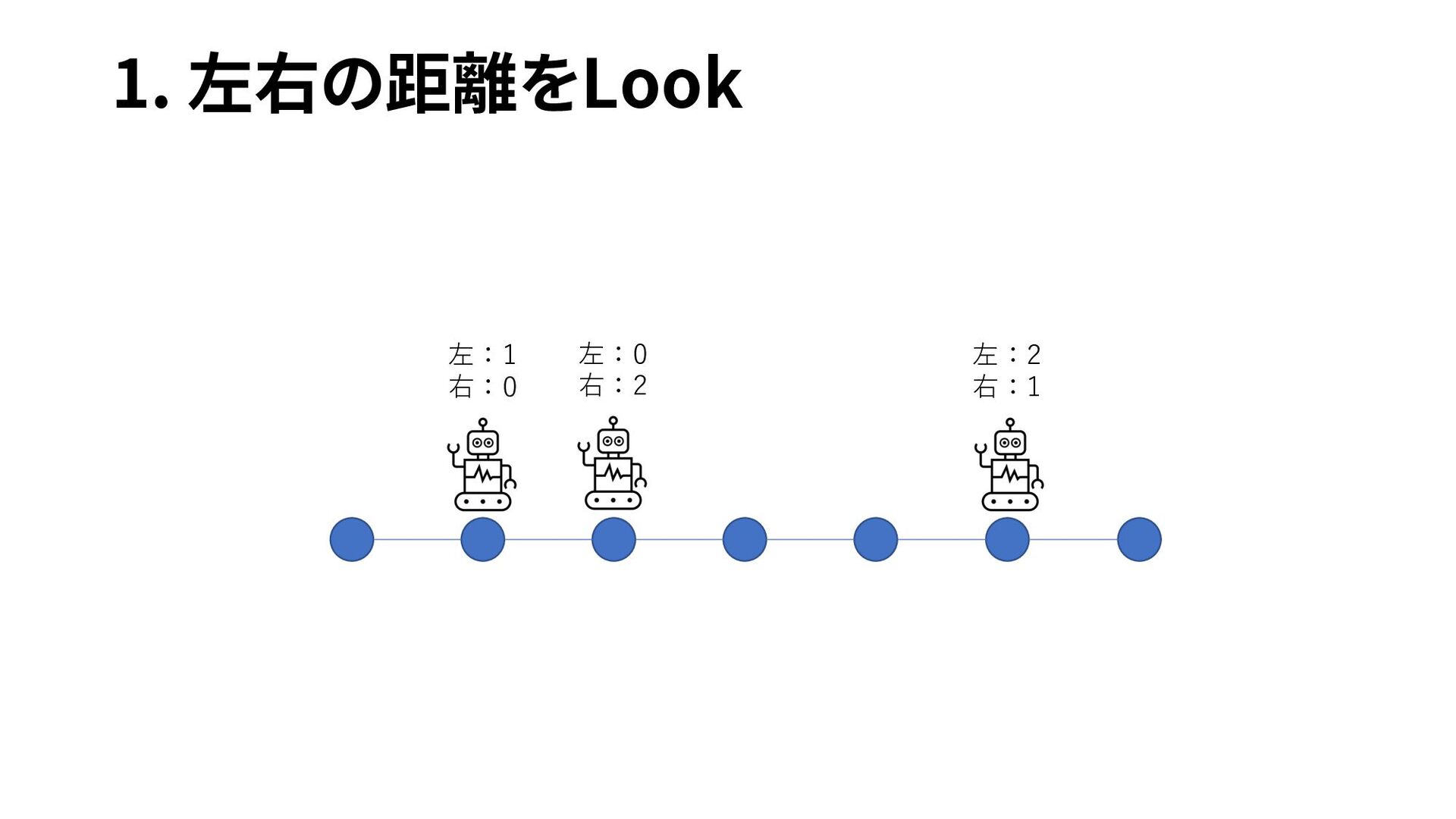
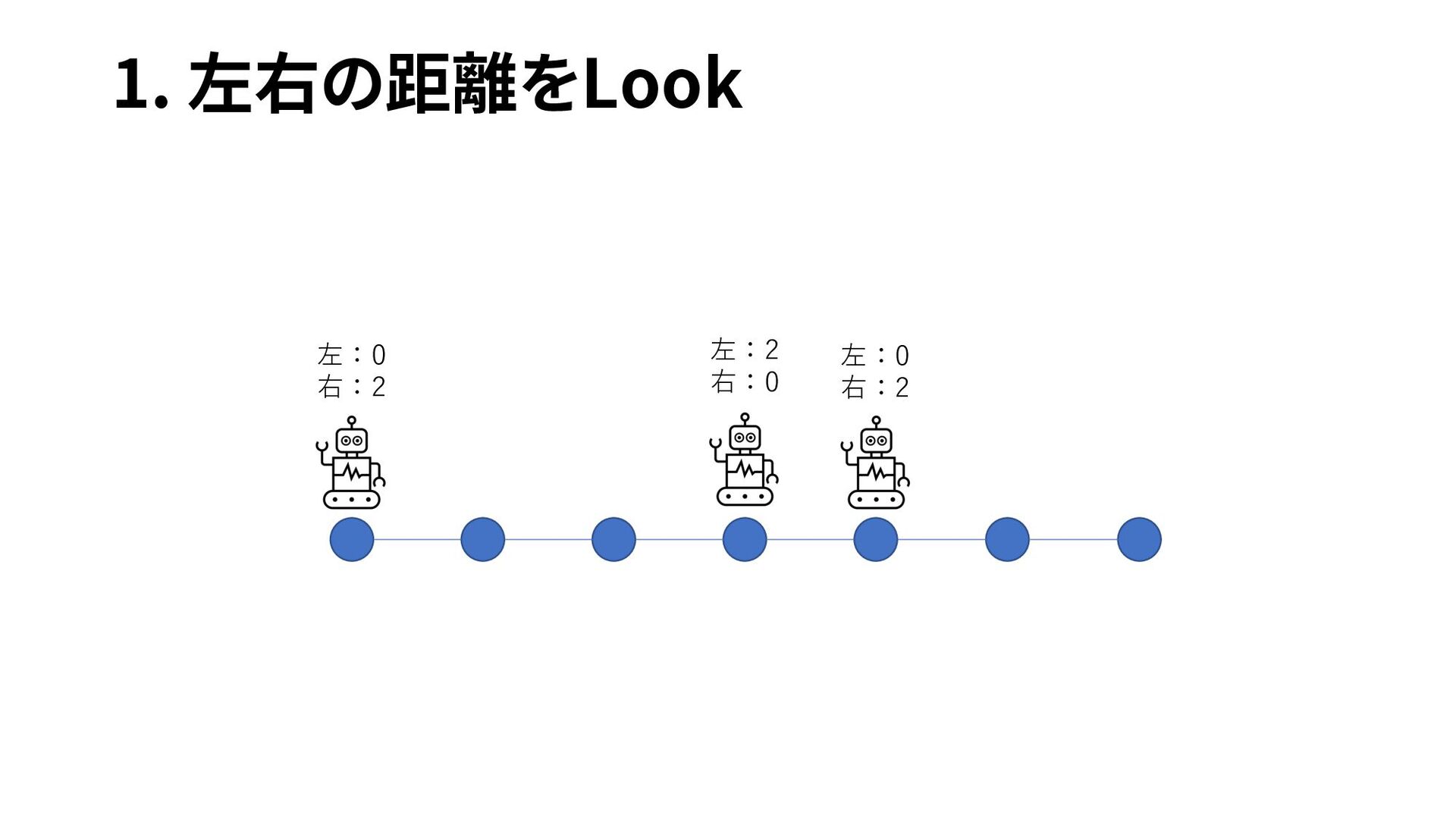
アルゴリズム 停⽌条件:左右が同じ距離 1. 左右のロボット or 壁との距離をLook 2. 左右の距離が同じ 1. 停⽌
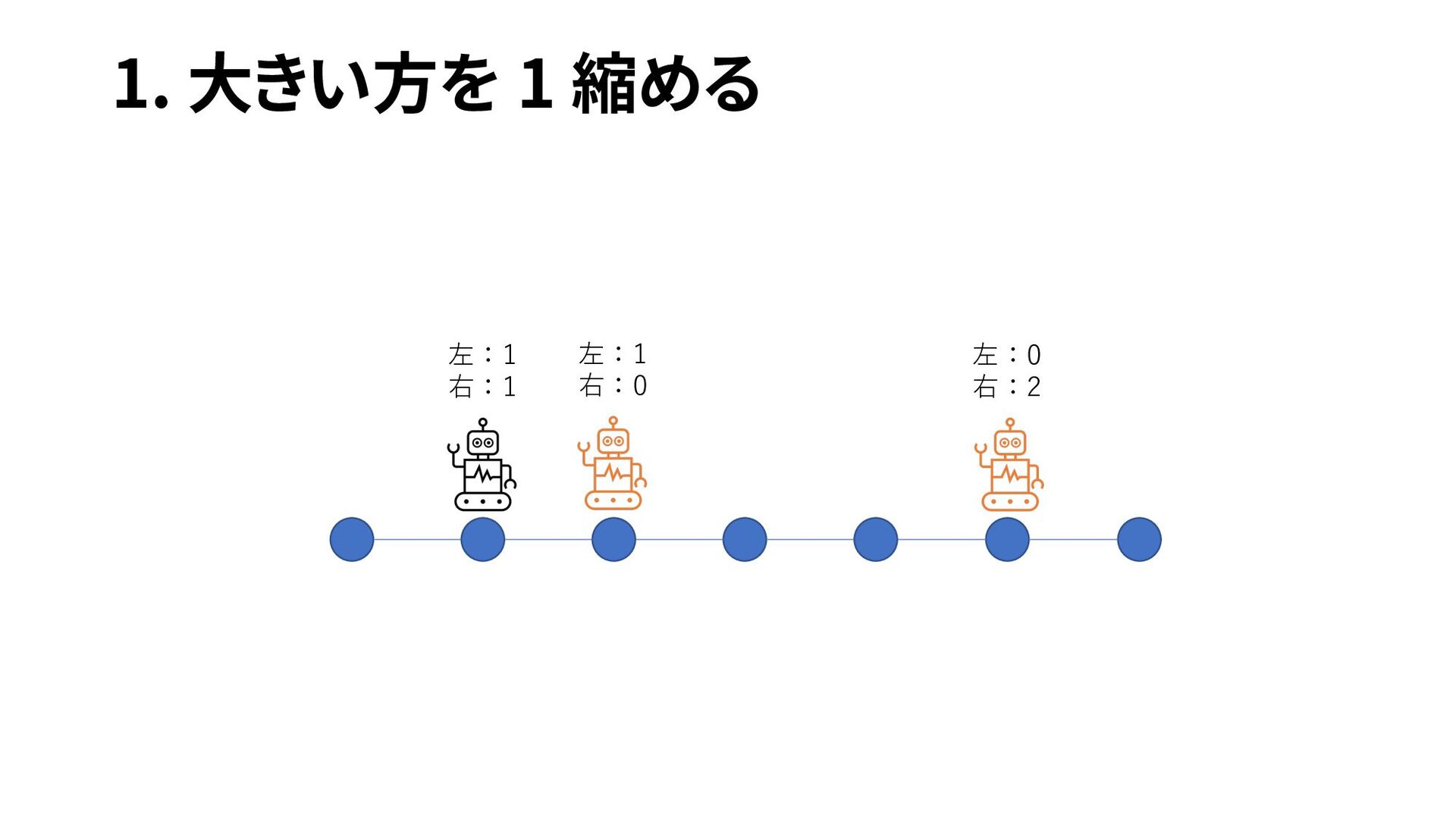
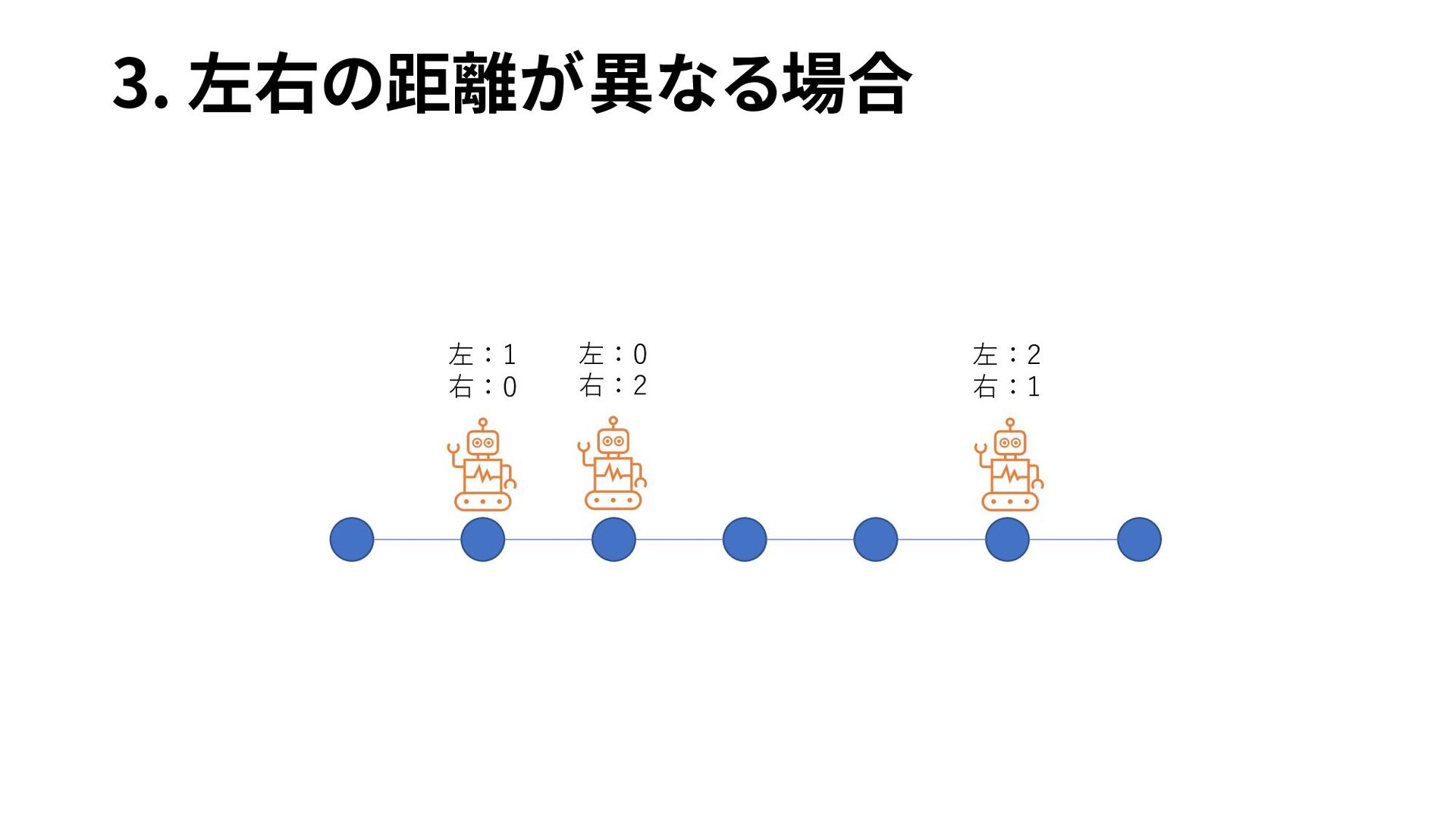
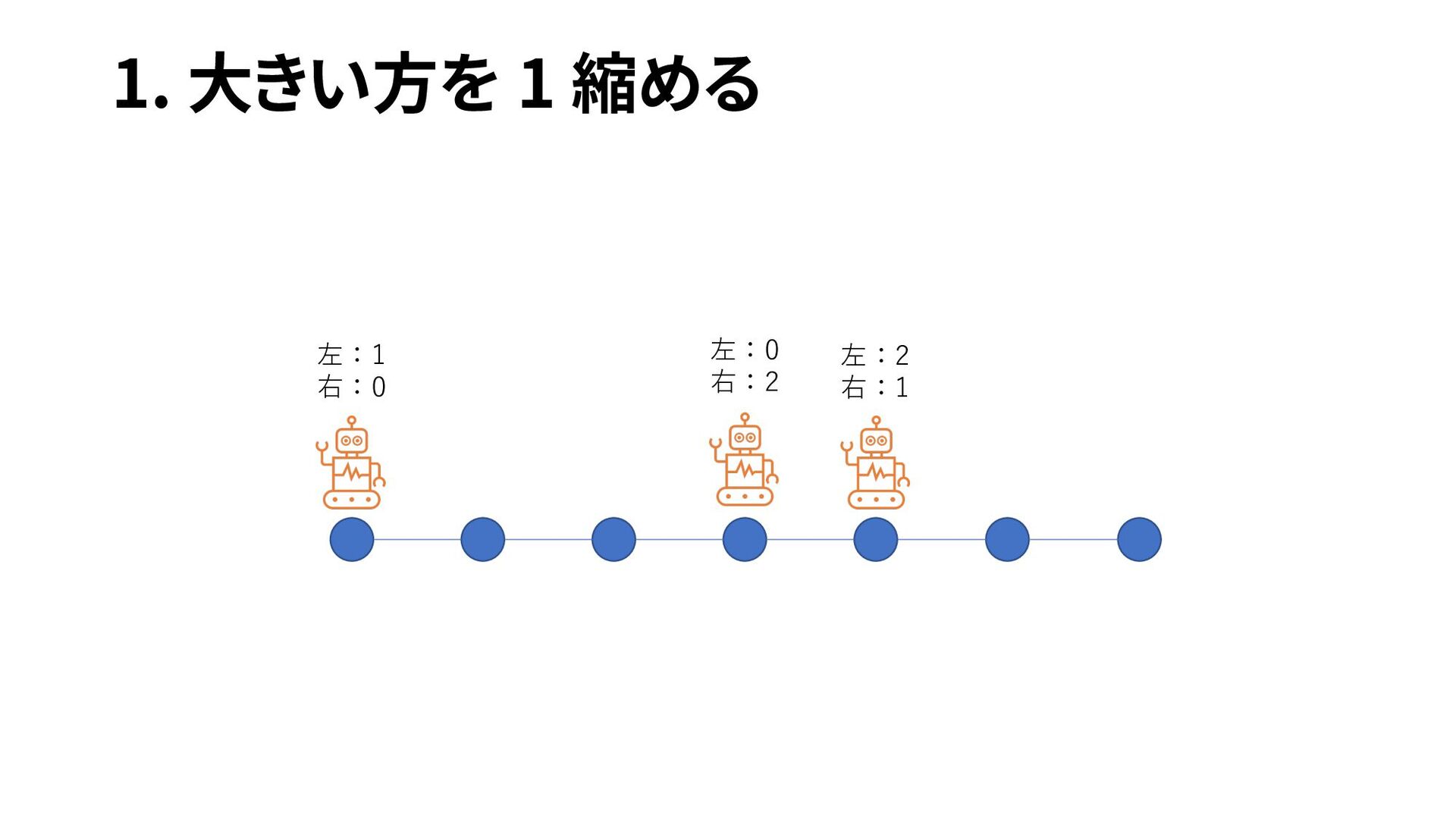
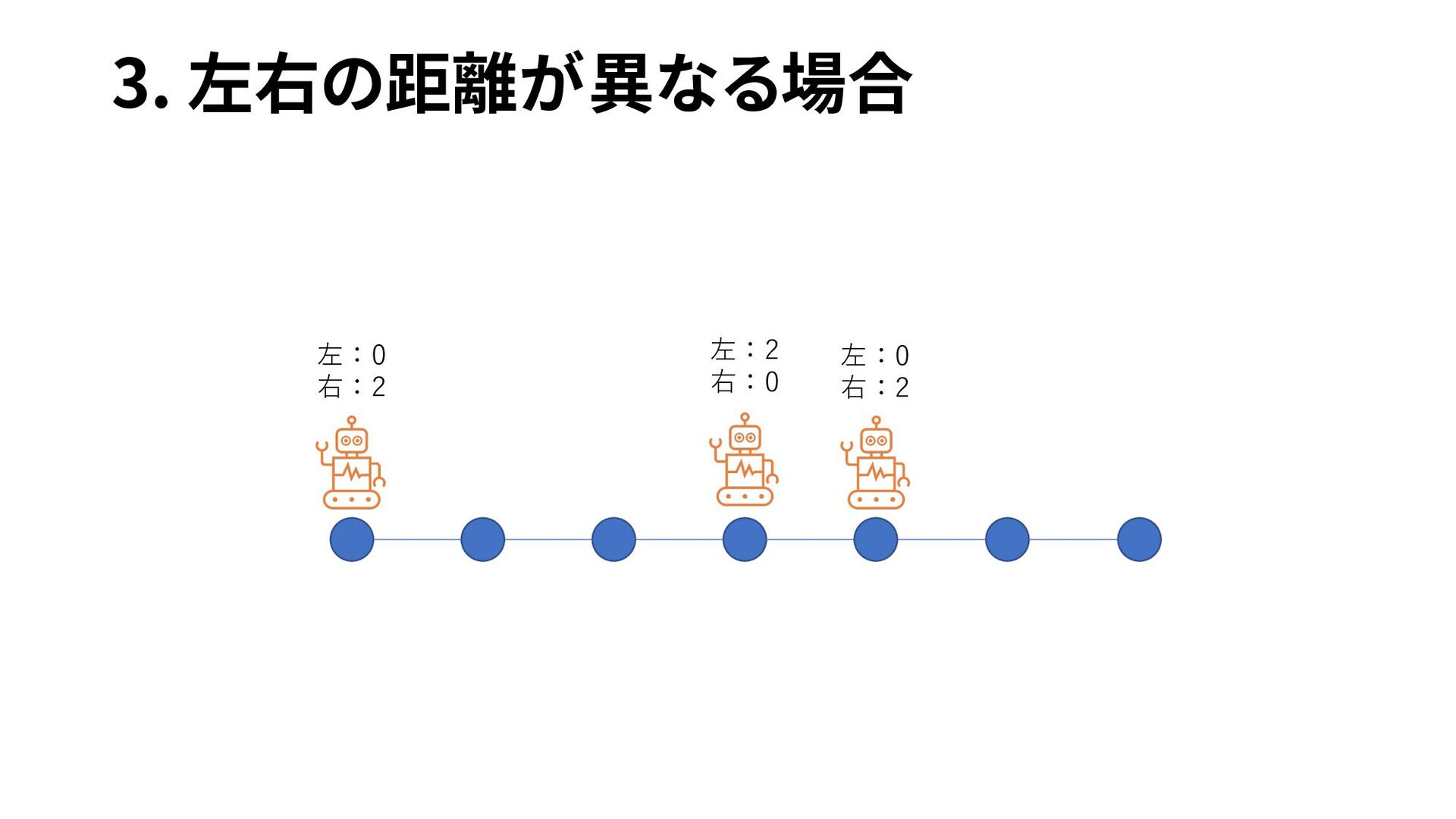
3. 左右の距離が異なる 1. ⼤きい⽅の距離を 1 縮めるようにMove 2. Lookに戻る
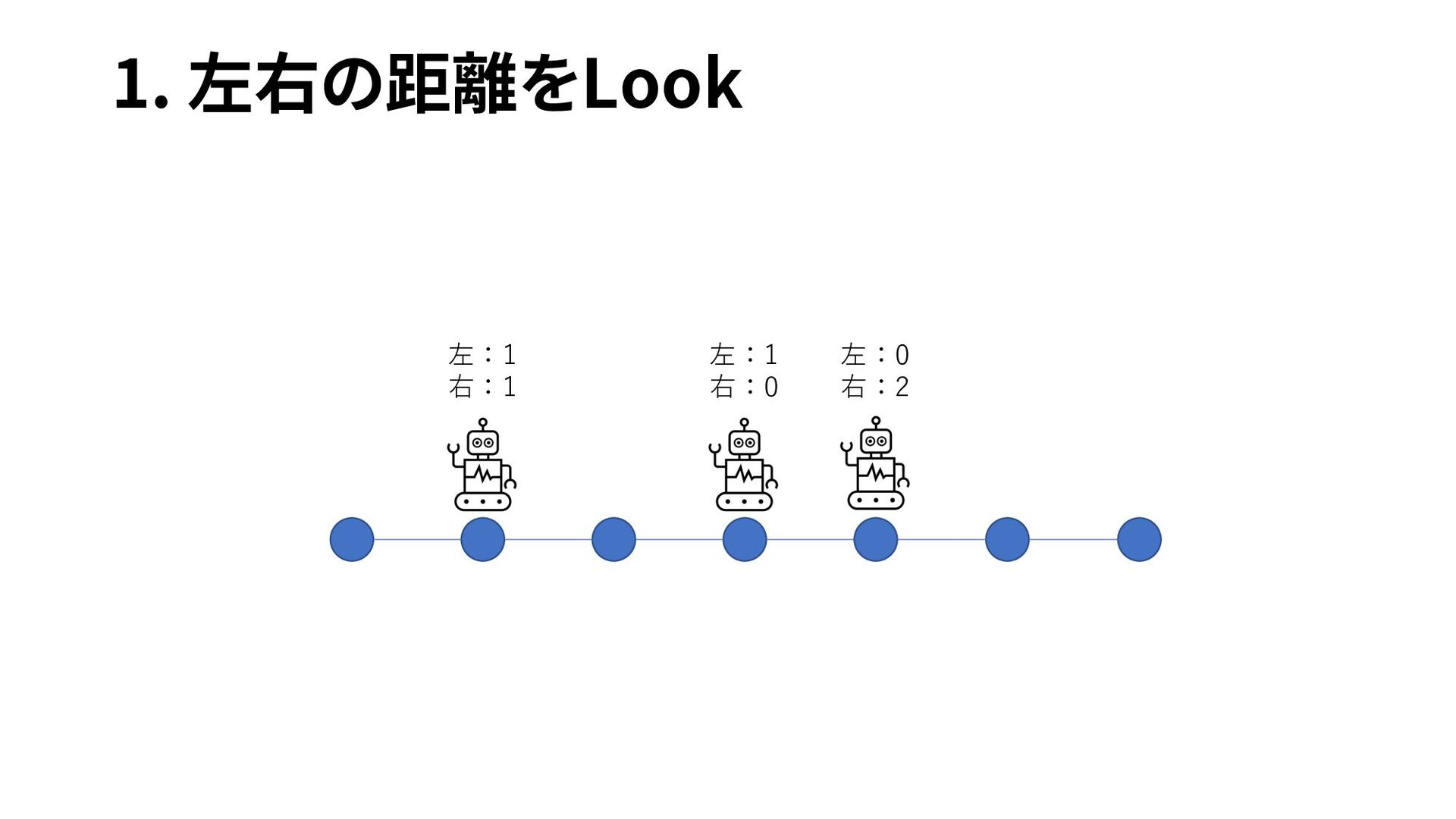
1. 左右の距離をLook 左:1 右:1 左:1 右:0 左:0 右:2
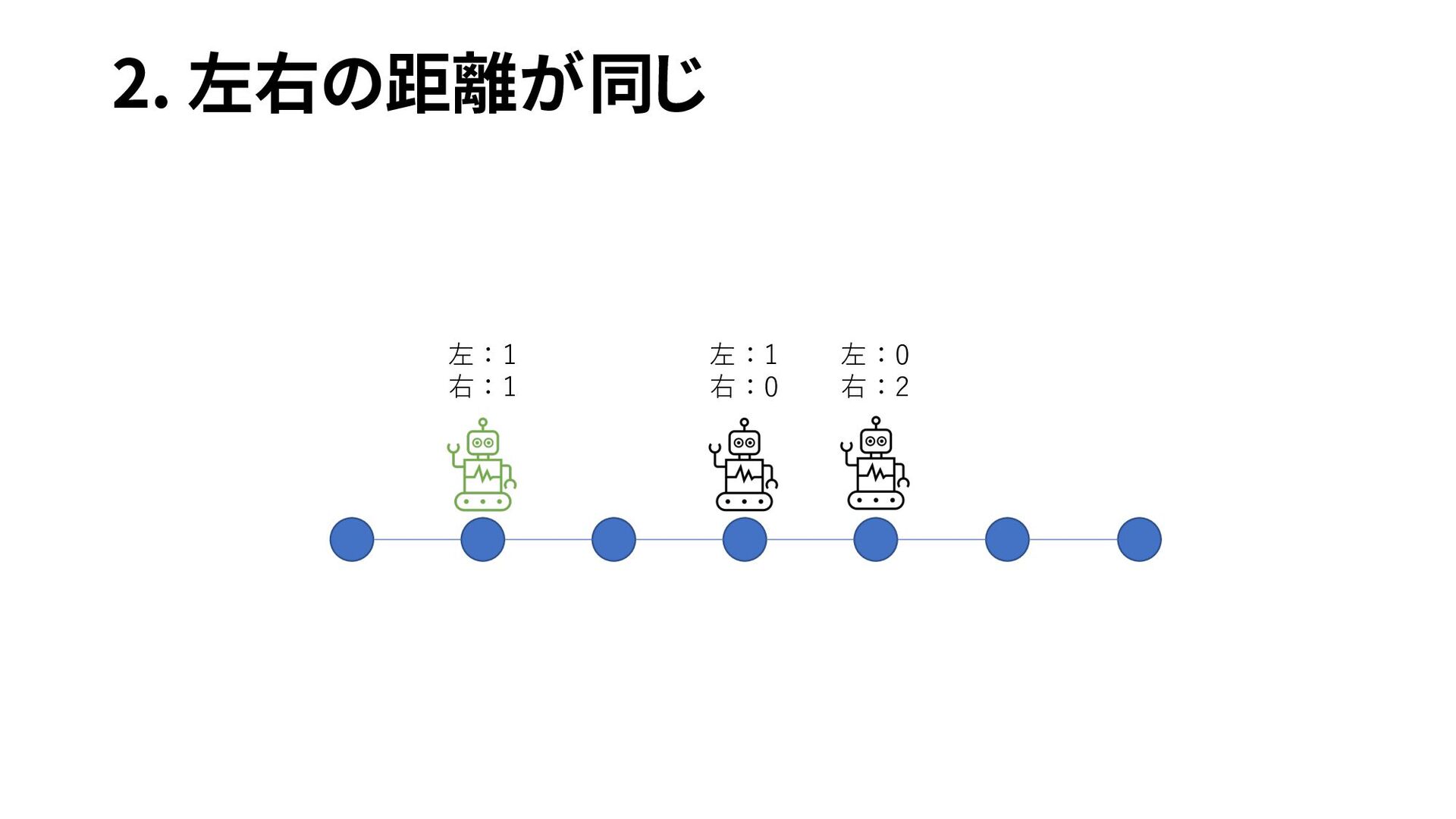
2. 左右の距離が同じ 左:1 右:1 左:1 右:0 左:0 右:2
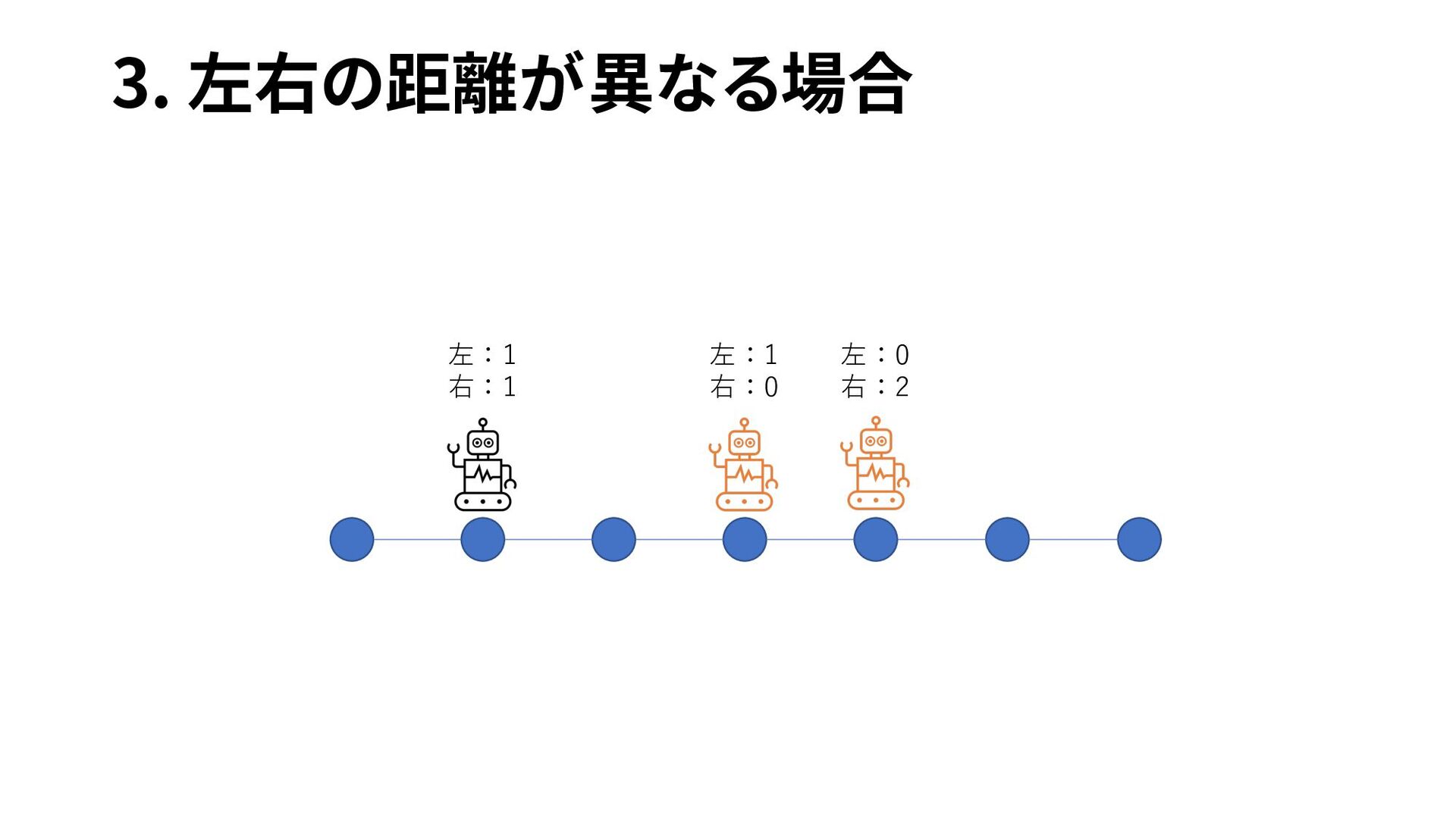
3. 左右の距離が異なる場合 左:1 右:1 左:1 右:0 左:0 右:2
1. 大きい方を 1 縮める 左:1 右:1 左:1 右:0 左:0 右:2
1. 左右の距離をLook 左:1 右:0 左:0 右:2 左:2 右:1
3. 左右の距離が異なる場合 左:1 右:0 左:0 右:2 左:2 右:1
1. 大きい方を 1 縮める 左:1 右:0 左:0 右:2 左:2 右:1
1. 左右の距離をLook 左:0 右:2 左:2 右:0 左:0 右:2
3. 左右の距離が異なる場合 左:0 右:2 左:2 右:0 左:0 右:2
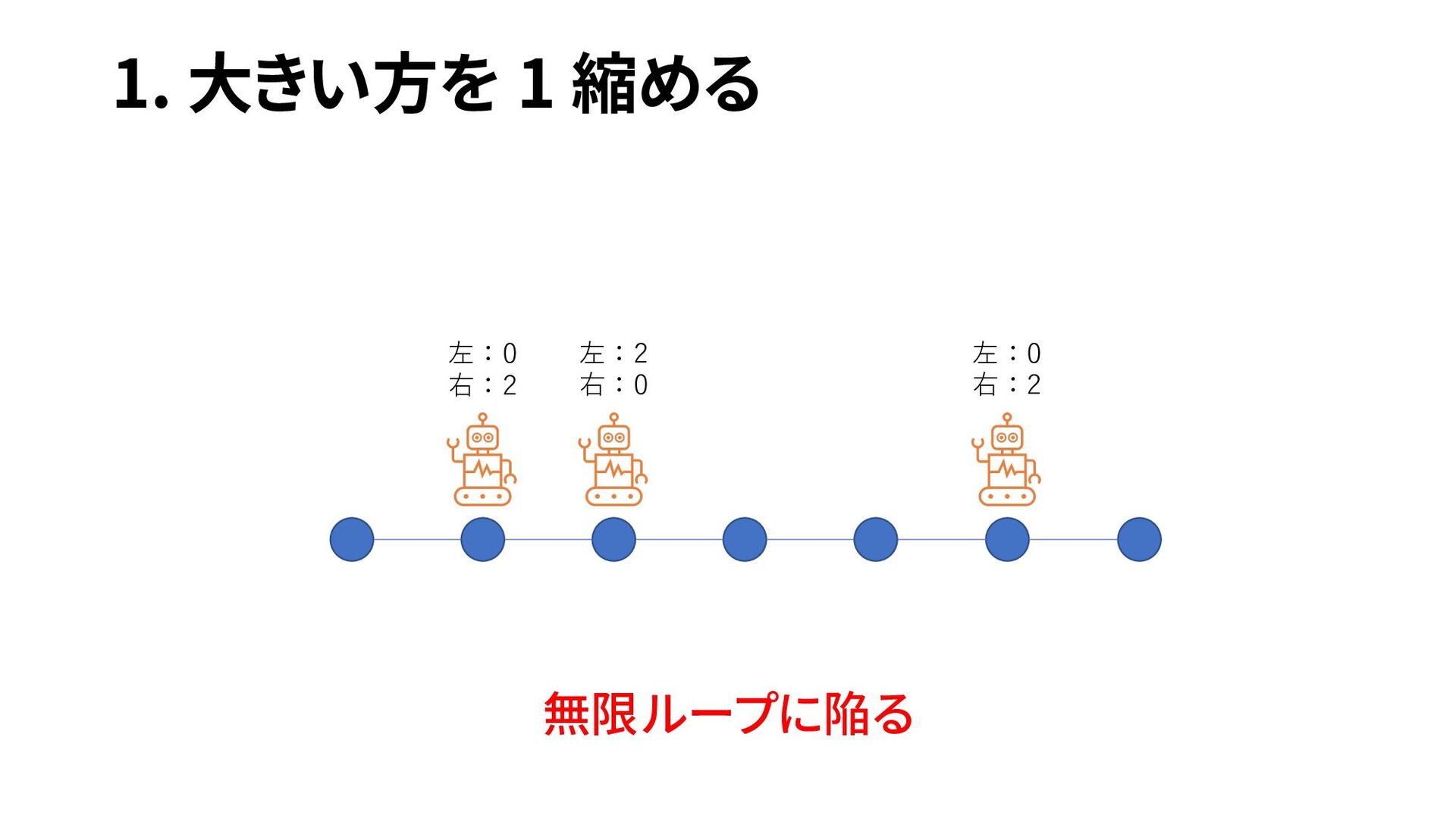
1. 大きい方を 1 縮める 左:0 右:2 左:2 右:0 左:0 右:2
無限ループに陥る
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}