Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
progressReport_k-hasegw_20230131.pdf
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
k-hasegw
January 31, 2023
360
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
progressReport_k-hasegw_20230131.pdf
k-hasegw
January 31, 2023
More Decks by k-hasegw
See All by k-hasegw
researchContentsForB4
khasegw0831
0
120
progressReport_k-hasegw_20230220.pdf
khasegw0831
0
120
progressReport_k-hasegw_20230117
khasegw0831
0
390
f-sync_algo
khasegw0831
0
260
Featured
See All Featured
How to Talk to Developers About Accessibility
jct
2
440
What’s in a name? Adding method to the madness
productmarketing
PRO
24
4.1k
Distributed Sagas: A Protocol for Coordinating Microservices
caitiem20
333
23k
WCS-LA-2024
lcolladotor
0
760
Design and Strategy: How to Deal with People Who Don’t "Get" Design
morganepeng
133
19k
Self-Hosted WebAssembly Runtime for Runtime-Neutral Checkpoint/Restore in Edge–Cloud Continuum
chikuwait
0
660
CSS Pre-Processors: Stylus, Less & Sass
bermonpainter
360
30k
Let's Do A Bunch of Simple Stuff to Make Websites Faster
chriscoyier
508
140k
Being A Developer After 40
akosma
91
590k
Making Projects Easy
brettharned
120
6.7k
The Straight Up "How To Draw Better" Workshop
denniskardys
239
140k
エンジニアに許された特別な時間の終わり
watany
108
250k
Transcript
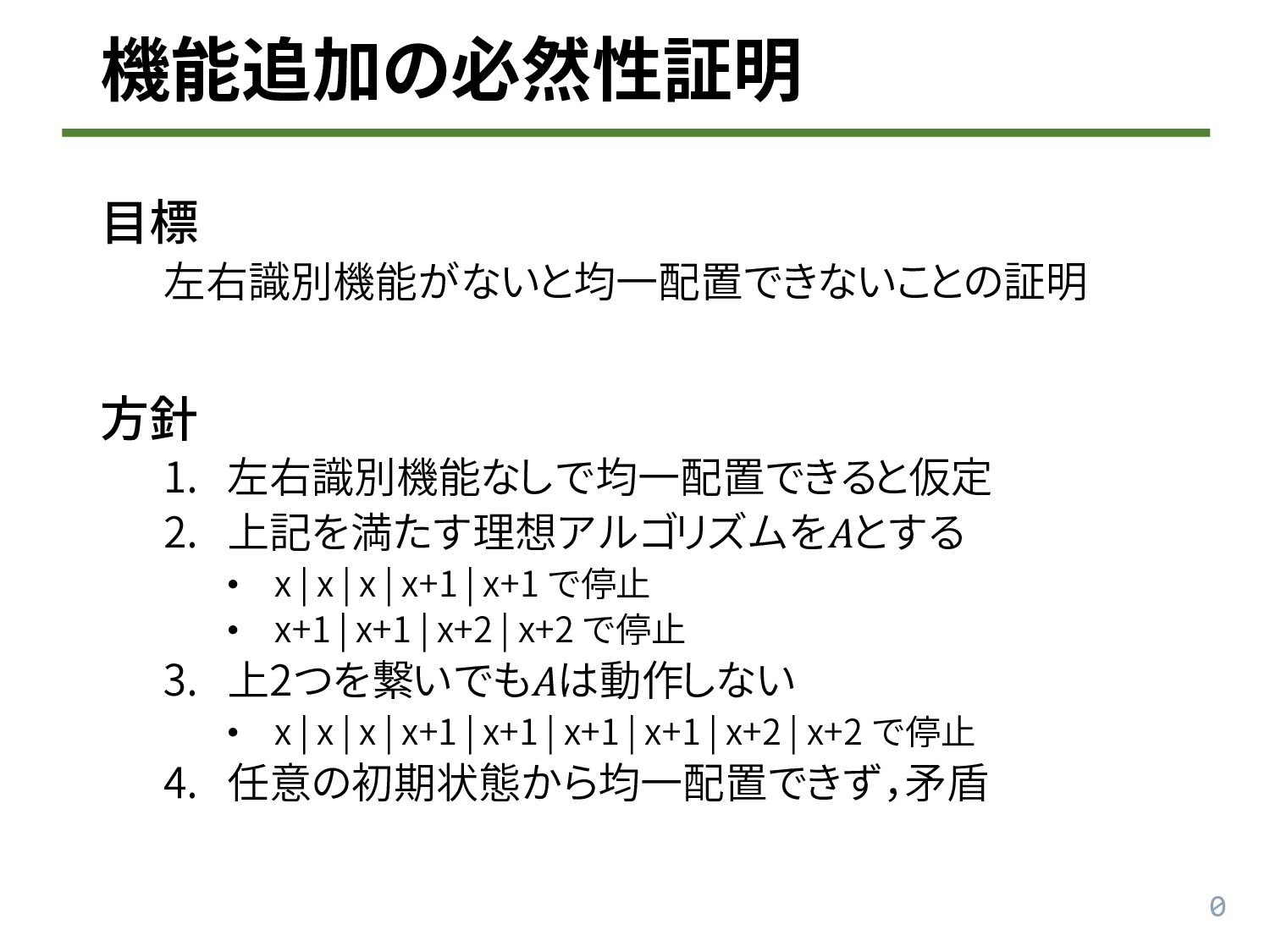
0 機能追加の必然性証明 目標 左右識別機能がないと均一配置できないことの証明 方針 1. 左右識別機能なしで均一配置できると仮定 2. 上記を満たす理想アルゴリズムを𝐴とする •
x | x | x | x+1 | x+1 で停止 • x+1 | x+1 | x+2 | x+2 で停止 3. 上2つを繋いでも𝐴は動作しない • x | x | x | x+1 | x+1 | x+1 | x+1 | x+2 | x+2 で停止 4. 任意の初期状態から均一配置できず,矛盾
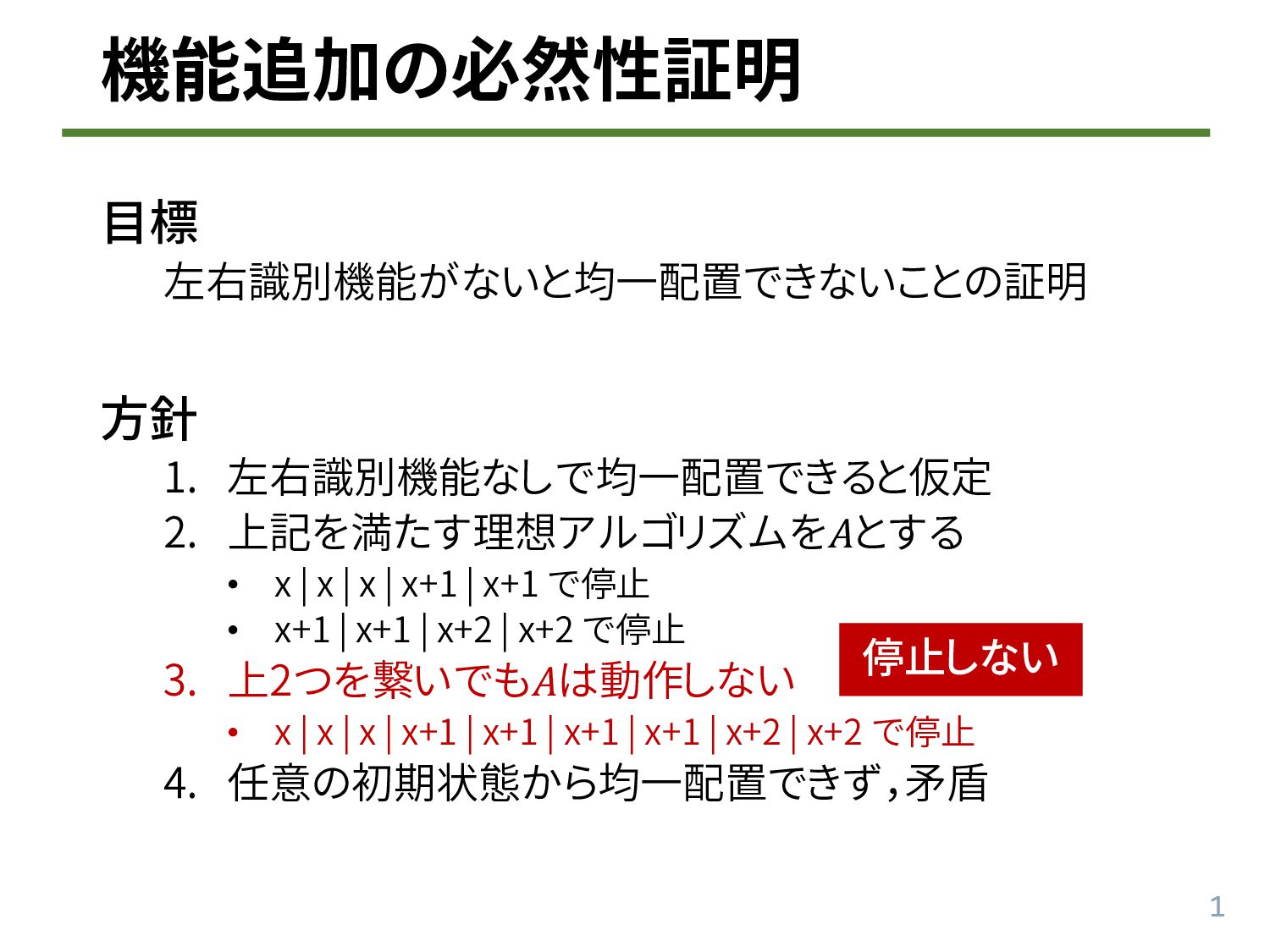
1 機能追加の必然性証明 目標 左右識別機能がないと均一配置できないことの証明 方針 1. 左右識別機能なしで均一配置できると仮定 2. 上記を満たす理想アルゴリズムを𝐴とする •
x | x | x | x+1 | x+1 で停止 • x+1 | x+1 | x+2 | x+2 で停止 3. 上2つを繋いでも𝐴は動作しない • x | x | x | x+1 | x+1 | x+1 | x+1 | x+2 | x+2 で停止 4. 任意の初期状態から均一配置できず,矛盾 停止しない
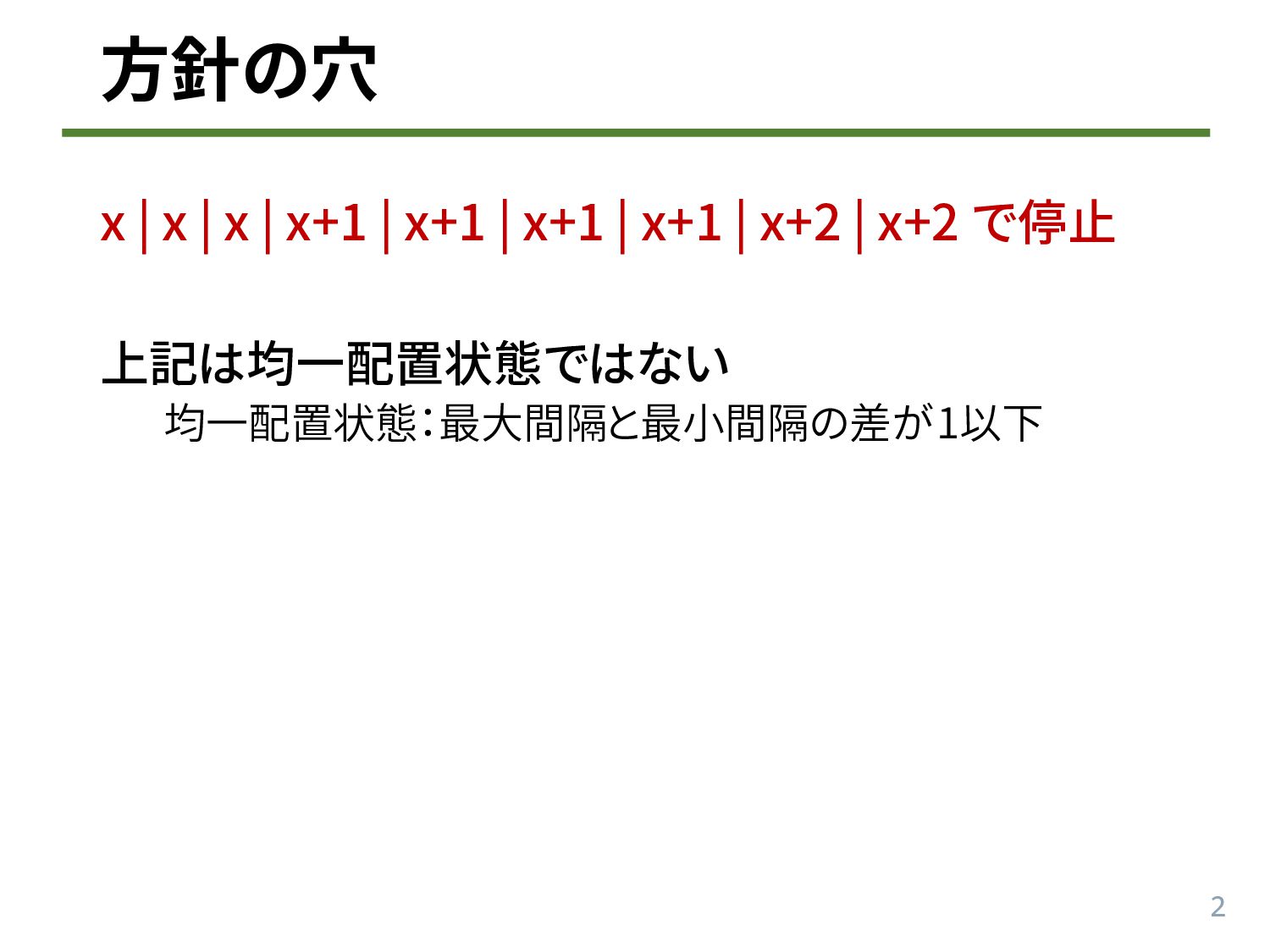
2 方針の穴 x | x | x | x+1 |
x+1 | x+1 | x+1 | x+2 | x+2 で停止 上記は均一配置状態ではない 均一配置状態:最大間隔と最小間隔の差が1以下
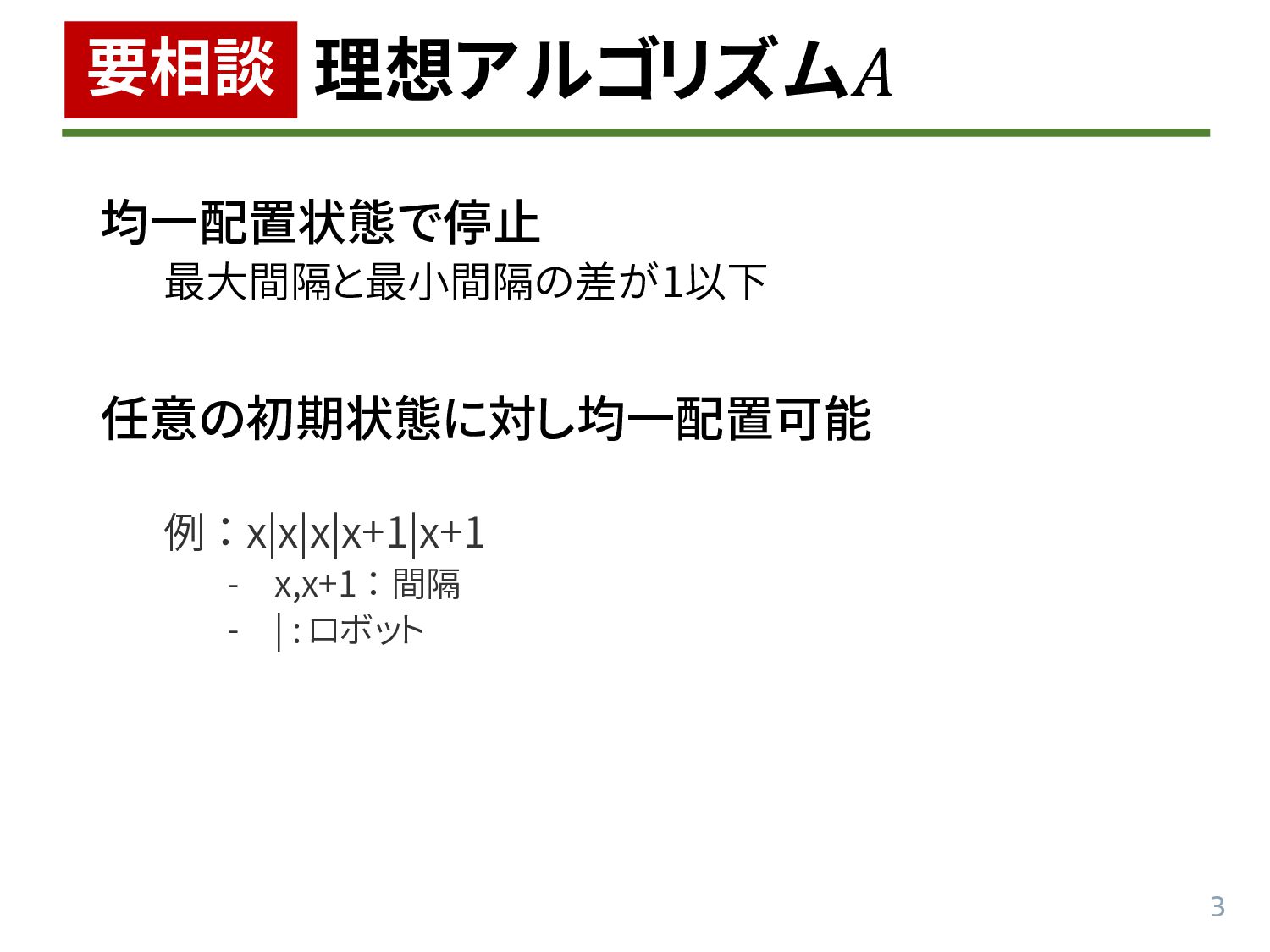
3 理想アルゴリズム𝐴 均一配置状態で停止 最大間隔と最小間隔の差が1以下 任意の初期状態に対し均一配置可能 例 : x|x|x|x+1|x+1 - x,x+1
: 間隔 - | : ロボット 要相談
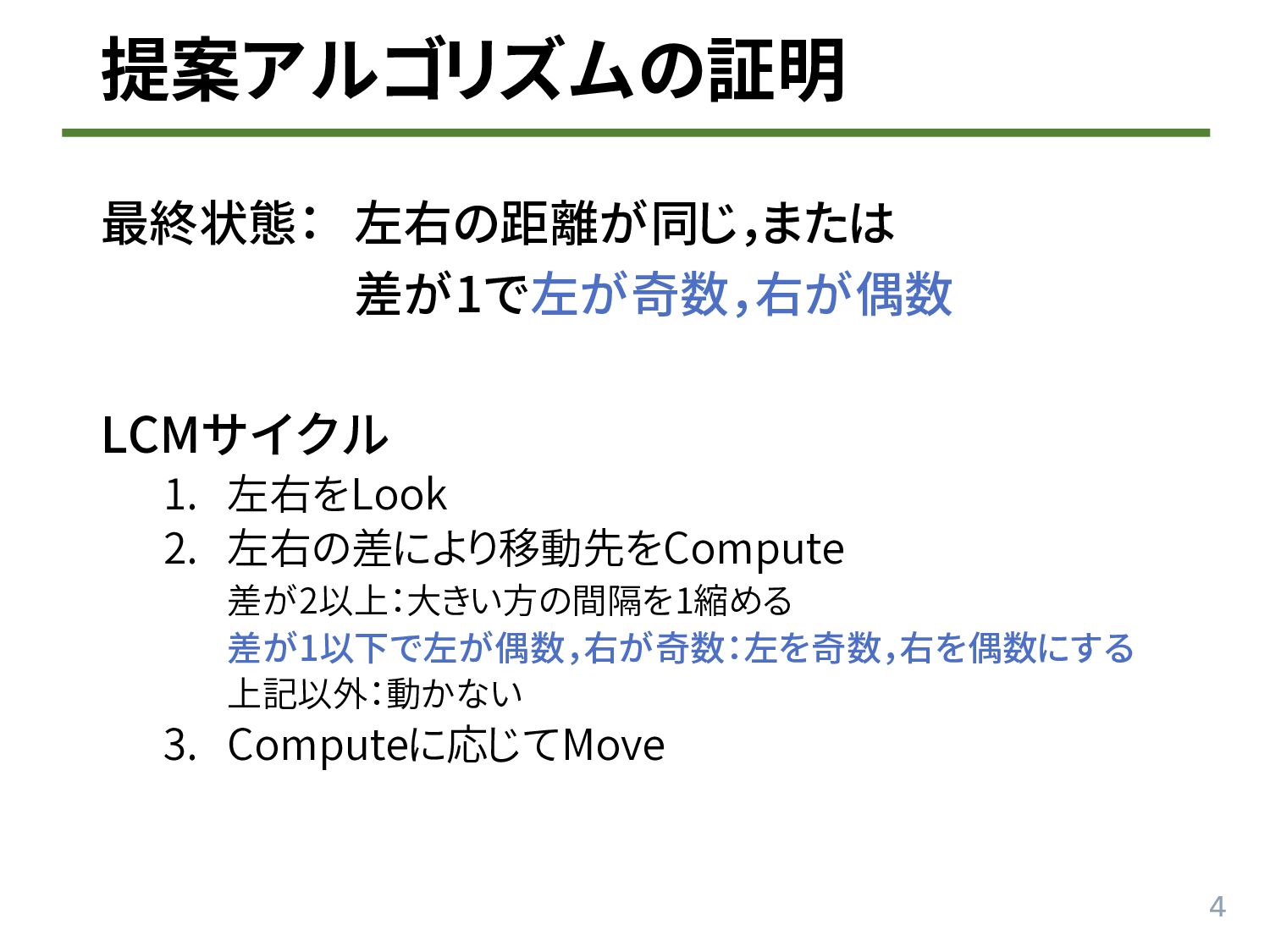
4 提案アルゴリズムの証明 最終状態: 左右の距離が同じ,または 差が1で左が奇数,右が偶数 LCMサイクル 1. 左右をLook 2. 左右の差により移動先をCompute
差が2以上:大きい方の間隔を1縮める 差が1以下で左が偶数,右が奇数:左を奇数,右を偶数にする 上記以外:動かない 3. Computeに応じてMove
5 証明方針 i. 𝑃 1 を示す ii. 𝑃 𝑘 −
1 を仮定し, 𝑃 𝑘 を示す iii. i,iiより𝑃(𝑟, 𝑙)は成立 命題 𝑃(𝑟) ロボット数 𝑟 ∈ ℕに対し,提案アルゴリズムは成立
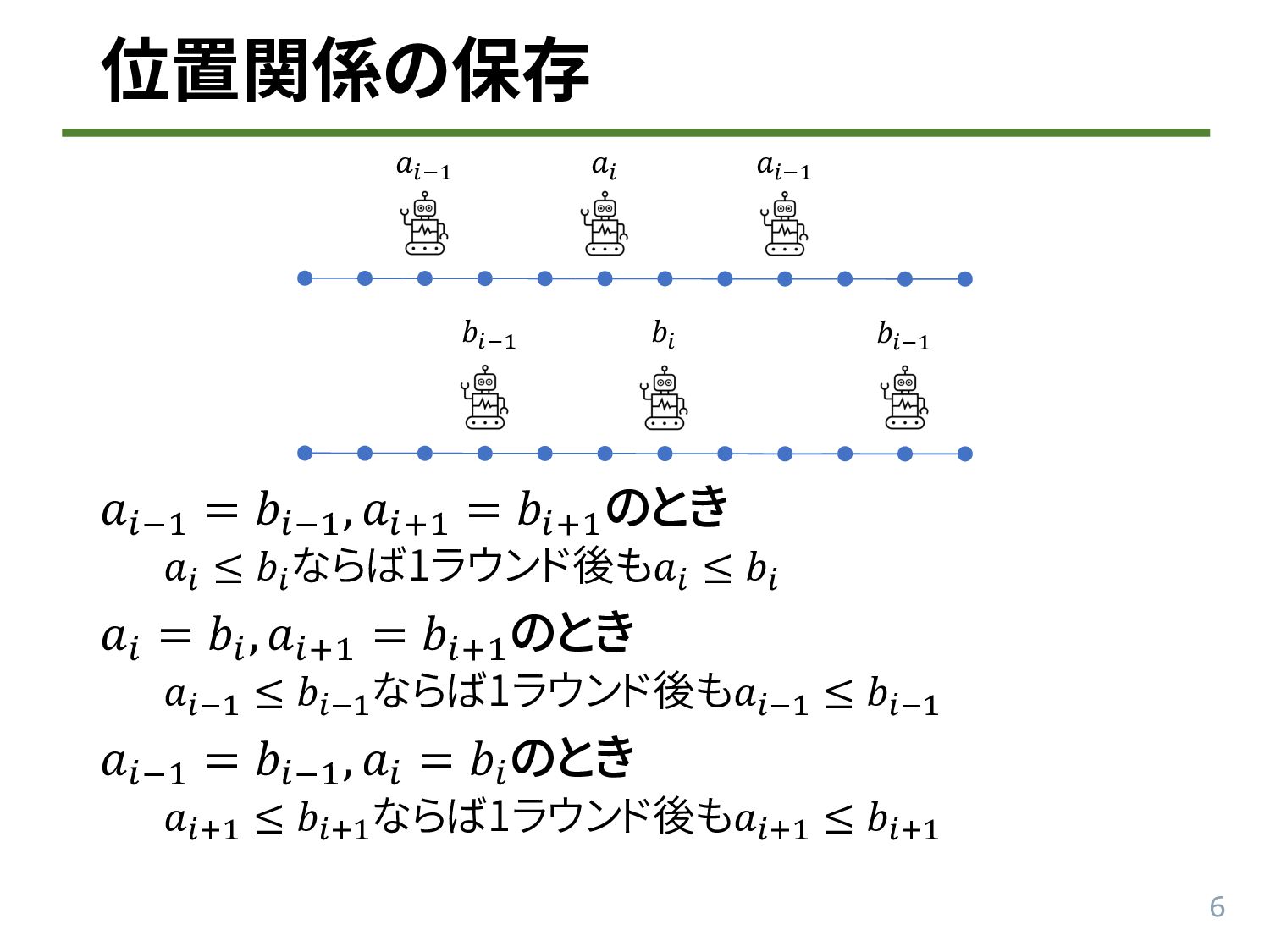
6 位置関係の保存 𝑎!"# = 𝑏!"# , 𝑎!$# = 𝑏!$# のとき
𝑎! ≤ 𝑏! ならば1ラウンド後も𝑎! ≤ 𝑏! 𝑎! = 𝑏! , 𝑎!$# = 𝑏!$# のとき 𝑎!"# ≤ 𝑏!"# ならば1ラウンド後も𝑎!"# ≤ 𝑏!"# 𝑎!"# = 𝑏!"# , 𝑎! = 𝑏! のとき 𝑎!$# ≤ 𝑏!$# ならば1ラウンド後も𝑎!$# ≤ 𝑏!$# 𝑎!"# 𝑎! 𝑎!"# 𝑏!"# 𝑏! 𝑏!"#
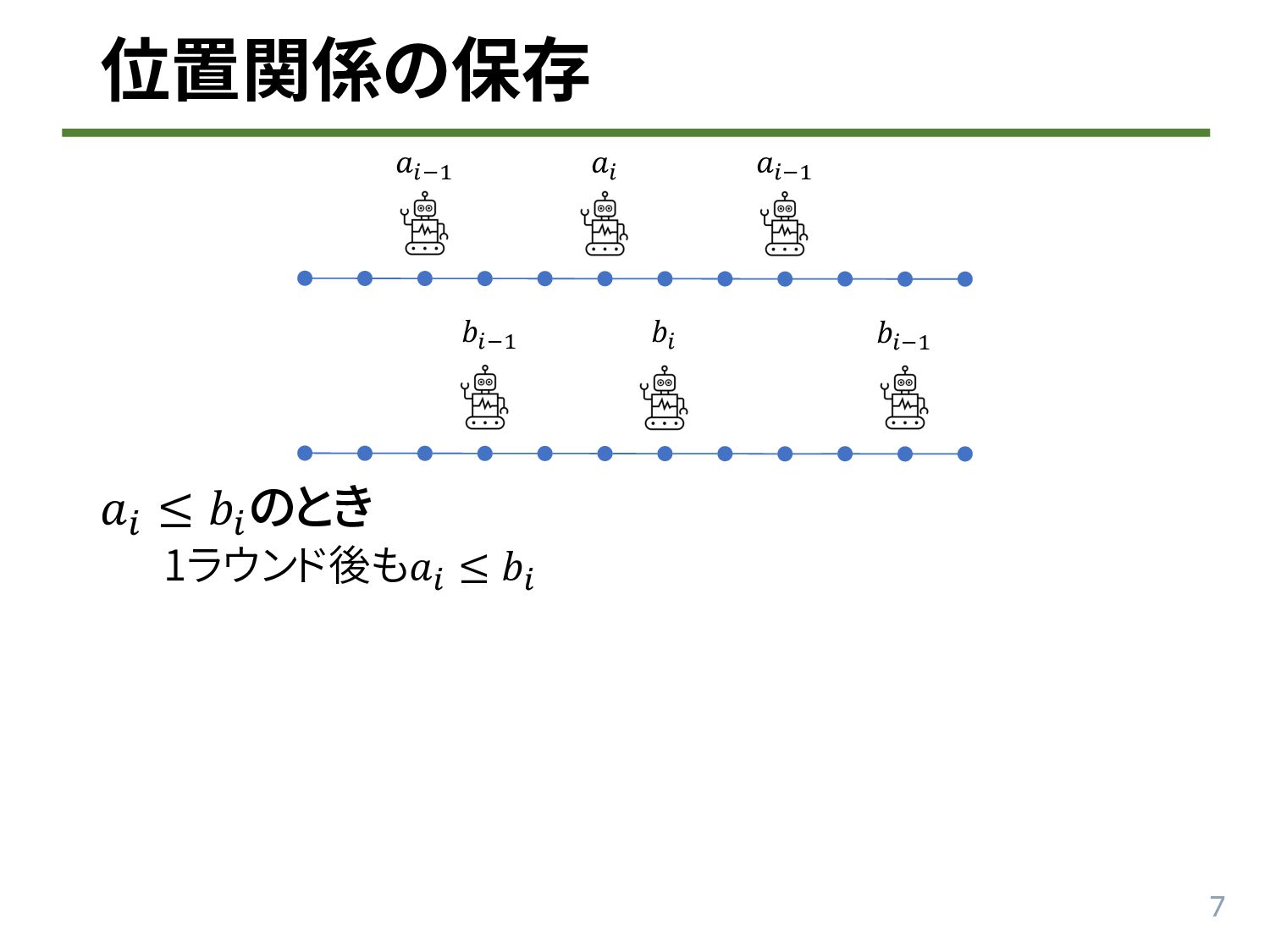
7 位置関係の保存 𝑎! ≤ 𝑏! のとき 1ラウンド後も𝑎! ≤ 𝑏! 𝑎!"#
𝑎! 𝑎!"# 𝑏!"# 𝑏! 𝑏!"#
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}