Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
progressReport_k-hasegw_20230220.pdf
Search
k-hasegw
February 20, 2023
Science
120
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
progressReport_k-hasegw_20230220.pdf
k-hasegw
February 20, 2023
More Decks by k-hasegw
See All by k-hasegw
researchContentsForB4
khasegw0831
0
120
progressReport_k-hasegw_20230131.pdf
khasegw0831
0
360
progressReport_k-hasegw_20230117
khasegw0831
0
390
f-sync_algo
khasegw0831
0
260
Other Decks in Science
See All in Science
Distributional Regression
tackyas
0
560
因果推論と機械学習
sshimizu2006
1
1.2k
TypeScript で WebAssembly を用いた 型安全なプラグイン設計
nagano
2
570
データベース04: SQL (1/3) 単純質問 & 集約演算
trycycle
PRO
0
1.6k
AIPシンポジウム 2025年度 成果報告会 「因果推論チーム」
sshimizu2006
3
560
摂理と合理の肉体改造 — AI時代の減量を支える観測・制御・継続
kiyoshi
0
1.3k
生成AIが科学とRAにもたらしていること:メタサイエンスの視点から
rmaruy
0
110
人生を変えた一冊「独学大全」のはなし / Self-study ENCYCLOPEDIA: The Book Which Change My Life #独学大全 #EM推し本
expajp
0
180
機械学習 - K近傍法 & 機械学習のお作法
trycycle
PRO
1
1.6k
データベース02: データベースの概念
trycycle
PRO
2
1.3k
[第67回 CV勉強会@関東] CV × Scientific Figures / kantoCV 67th CVPR 2026
lychee1223
0
150
生成AIと司法書士の未来.pdf
tagtag
PRO
0
140
Featured
See All Featured
The Limits of Empathy - UXLibs8
cassininazir
1
550
Building Experiences: Design Systems, User Experience, and Full Site Editing
marktimemedia
0
560
How To Speak Unicorn (iThemes Webinar)
marktimemedia
1
510
The Hidden Cost of Media on the Web [PixelPalooza 2025]
tammyeverts
2
390
Taking LLMs out of the black box: A practical guide to human-in-the-loop distillation
inesmontani
PRO
3
2.3k
Docker and Python
trallard
47
4k
It's Worth the Effort
3n
188
29k
"I'm Feeling Lucky" - Building Great Search Experiences for Today's Users (#IAC19)
danielanewman
230
23k
AI Search: Where Are We & What Can We Do About It?
aleyda
0
7.7k
16th Malabo Montpellier Forum Presentation
akademiya2063
PRO
0
290
Making Projects Easy
brettharned
120
6.7k
Why You Should Never Use an ORM
jnunemaker
PRO
61
9.9k
Transcript
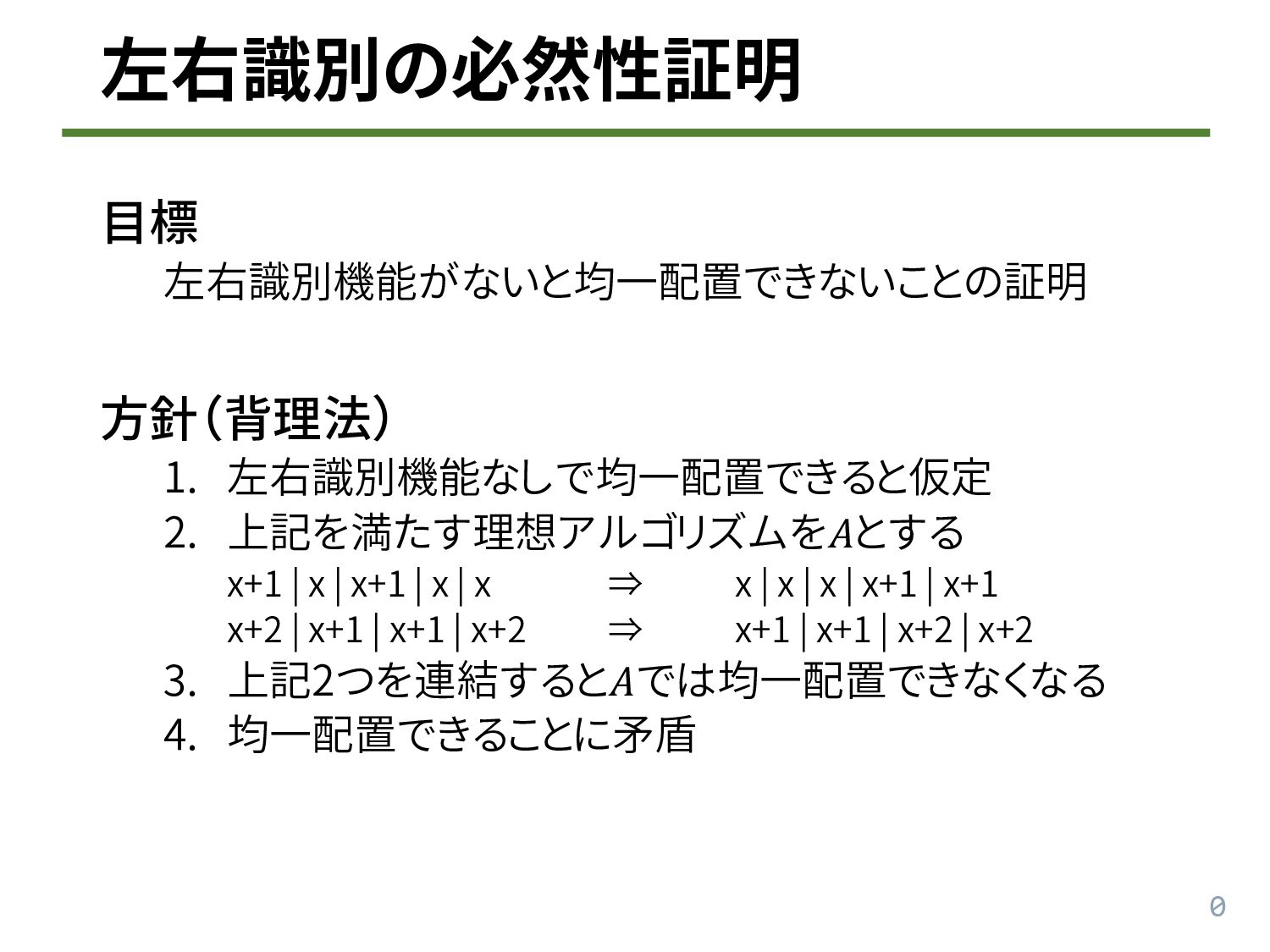
0 左右識別の必然性証明 目標 左右識別機能がないと均一配置できないことの証明 方針(背理法) 1. 左右識別機能なしで均一配置できると仮定 2. 上記を満たす理想アルゴリズムを𝐴とする x+1
| x | x+1 | x | x ⇒ x | x | x | x+1 | x+1 x+2 | x+1 | x+1 | x+2 ⇒ x+1 | x+1 | x+2 | x+2 3. 上記2つを連結すると𝐴では均一配置できなくなる 4. 均一配置できることに矛盾
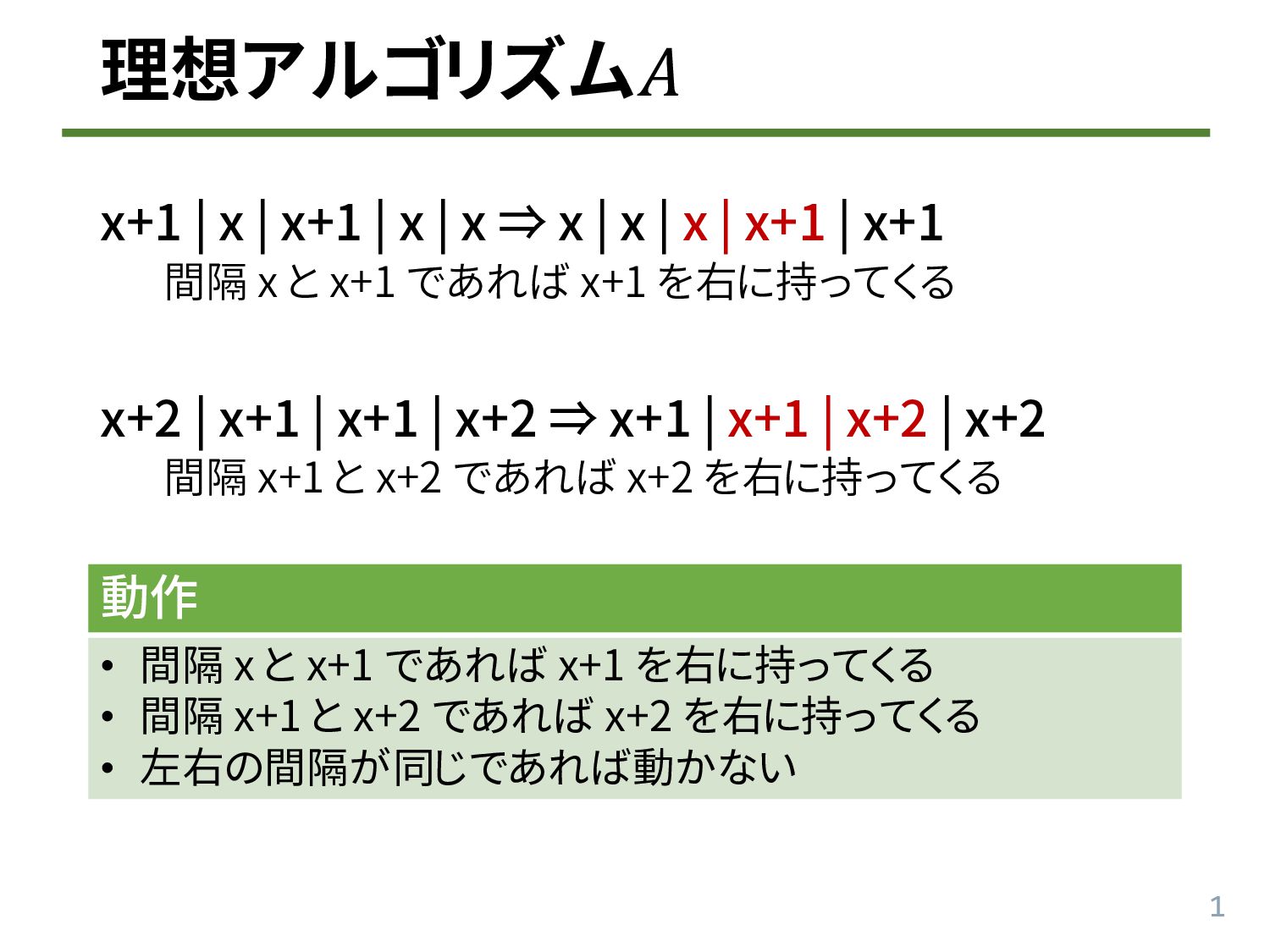
1 理想アルゴリズム𝐴 x+1 | x | x+1 | x |
x ⇒ x | x | x | x+1 | x+1 間隔 x と x+1 であれば x+1 を右に持ってくる x+2 | x+1 | x+1 | x+2 ⇒ x+1 | x+1 | x+2 | x+2 間隔 x+1 と x+2 であれば x+2 を右に持ってくる 動作 • 間隔 x と x+1 であれば x+1 を右に持ってくる • 間隔 x+1 と x+2 であれば x+2 を右に持ってくる • 左右の間隔が同じであれば動かない
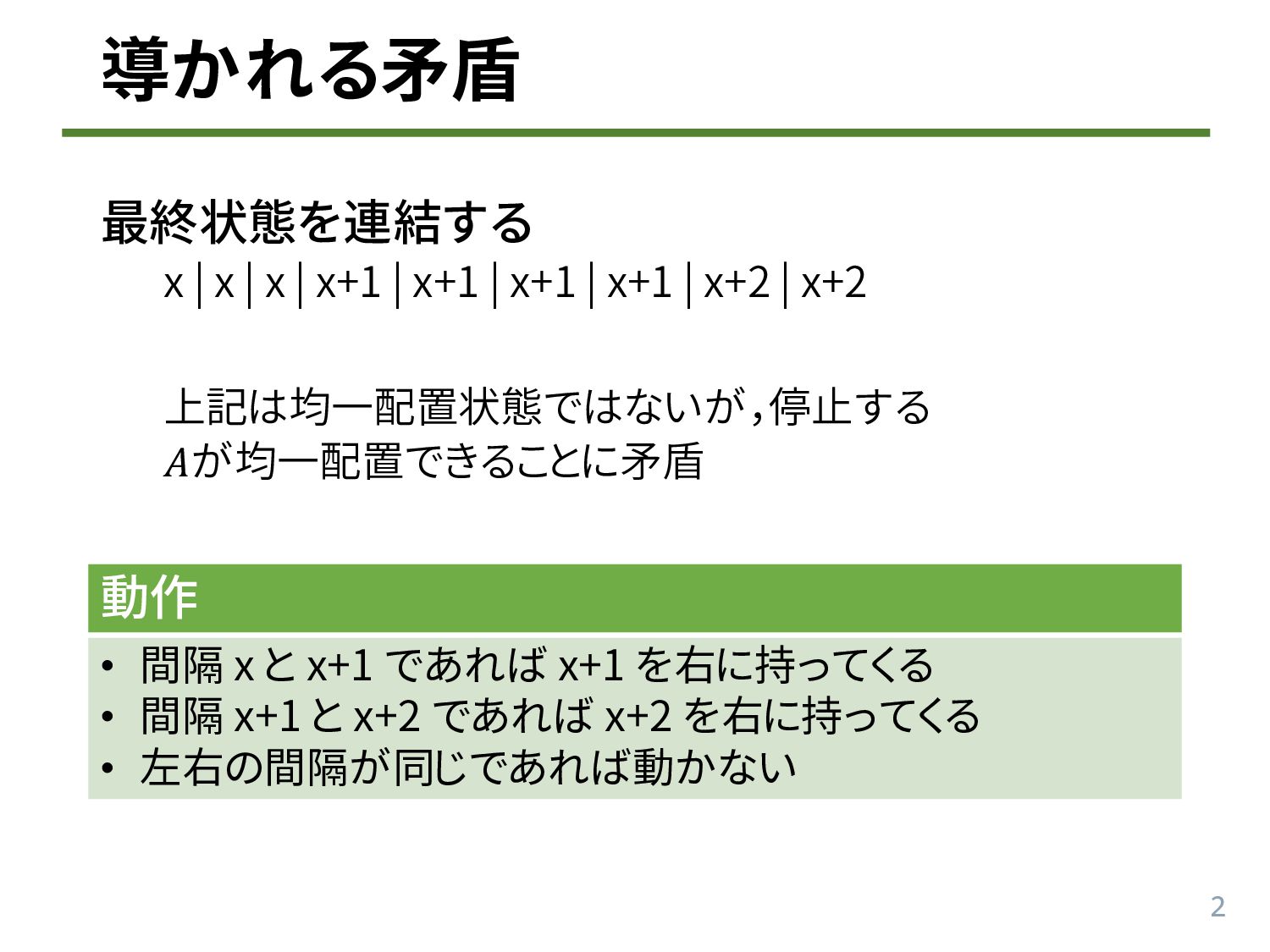
2 導かれる矛盾 最終状態を連結する x | x | x | x+1
| x+1 | x+1 | x+1 | x+2 | x+2 上記は均一配置状態ではないが,停止する 𝐴が均一配置できることに矛盾 動作 • 間隔 x と x+1 であれば x+1 を右に持ってくる • 間隔 x+1 と x+2 であれば x+2 を右に持ってくる • 左右の間隔が同じであれば動かない
3 全ロボット数𝑟,ノード数𝑛の把握 𝑟, 𝑛の両方がわかると均一配置可能か? • 完全な等間隔であれば可能 • 2 | 2
| 2 | 3 | 3 のような場合は怪しい
{kind=link}
{kind=link}
{kind=link}
{kind=link}